6.4.2. Циркуляция и ротор векторного поля
Возьмем в этом поле замкнутую кривую L и выберем на ней определенное направление. Обычно положительным считают обход против часовой стрелки, отрицательным – по часовой стрелке (рис. 6.4.5).
Рис. 6.4.5. Контур L (положительный обход)
Пусть – радиус-вектор точки M на контуре L. Известно, что вектор направлен по касательной к кривой в направлении ее обхода и , где – дифференциал дуги кривой ( ).
Определение 2. Криволинейный интеграл по замкнутому контуру L от скалярного произведения вектора на вектор , касательный к контуру L, называется циркуляцией вектора вдоль L, т.е.
Рассмотрим различные формы записи циркуляции. Так как
где – проекция вектора F на касательную , проведенную в направлении обхода кривой L, то равенство (6.4.4) можно записать в виде
Циркуляция Ц, записанная в виде (6.4.5) имеет простой физический смысл: если кривая L расположена в силовом поле, то циркуляция – это работа силы F поля при перемещении материальной точки вдоль L.
Отметим, что вдоль замкнутых векторных линий циркуляция отлична от нуля, потому что в каждой точке векторной линии скалярное произведение сохраняет знак: положительный, если направление вектора F совпадает с направлением обхода векторной линии; отрицательный – в противном случае.
Пример 5. Найти циркуляцию плоского векторного поля по замкнутой кривой L в положительном направлении, если , L – окружность, задаваемая уравнением .
Решение. Запишем параметрические уравнения окружности:
Тогда циркуляция поля F вдоль кривой L будет равна:
Циркуляция – скалярная величина. Если выбран контур, то ее значения зависят от характера векторного поля и от положения контура в этом поле, т.е. с помощью циркуляции можно охарактеризовать степень завихренности векторного поля в различных его местах. Поясним это на примерах.
Пример 6. Рассмотрим поле скоростей равномерно текущей жидкости v=const (Рис. 6.4.6).
Рис. 6.4.6. Замкнутый контур L в поле скоростей равномерно текущей жидкости
В качестве плоского замкнутого контура L возьмем пробное колесико с радиальными лопатками, которое может вращаться вокруг оси , перпендикулярной плоскости контура. При помещении колесика в поток жидкости в любом месте оно вращаться не будет.
Это говорит о том, что циркуляция вектора скорости v по контуру колесика равна нулю, т.е. поле не имеет завихренности.
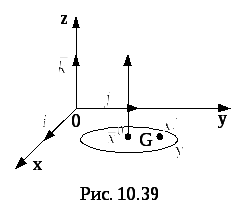
Пример 7. Пусть поток жидкости, подобно твердому телу, вращается, например, вокруг оси, параллельной оси Oz (см. рис. 6.4.7).
Рис. 6.4.7. Замкнутый контур в поле скоростей точек вращающейся жидкости
Очевидно, при помещении в него пробного колесика, колесико будет вращаться, причем тем быстрее, чем больше циркуляция поля скоростей по его контуру.
Скорость вращения колесика будет зависеть от двух причин: от расстояния между контуром и осью вращения поля, а также от того, как ориентирована ось контура по отношению к оси вращения поля. В данном месте циркуляция будет максимальной, если ось контура совпадет с осью вращения поля.
Из приведенных примеров следует, что с помощью циркуляции можно охарактеризовать степень завихренности поля в различных его местах. Для этого нужно исключить зависимость циркуляции от размеров и формы контура.
С этой целью вводится понятие плотности циркуляции поля в точке и понятие ротора.
Пусть векторное поле образовано вектором
в области D. Возьмем в нем произвольную точку и проведем из нее произвольный вектор n. В плоскости, перпендикулярной вектору n и содержащей точку М, построим замкнутый контур L. Направление обхода контура возьмем положительным, т.е. согласуем его с направлением n по правилу правого винта.
Циркуляция векторного поля по контуру L вдоль оси n
Разделим циркуляцию по контуру L на площадь контура и перейдем к пределу, стягивая контур в точку М. Предел, если он существует, называют плотностью циркуляции поля в точке вокруг оси n, обозначают
В одной и той же точке М плотность циркуляции поля вокруг различных осей неодинакова. Ее максимальное значение в данной точке будет вокруг оси , которая совпадает с осью вращения поля.
Определение 3. Вектор, длина которого равна максимальной плотности циркуляции поля в данной точке, называют ротором или вихрем поля в этой точке, обозначают
|rot(F(M))| Ц
Направлен ротор по оси, вокруг которой плотность циркуляции максимальна. Величина плотности циркуляции поля в точке М вокруг произвольного направления равна проекции ротора в данной точке на это направление.
Если векторное поле задано тремя функциями
которые имеют непрерывные частные производные в области D, то координаты ротора в произвольной точке определяют по выражению
rot(F(M)) (6.4.7)
Данная формула трудна для запоминания. Поэтому проекции ротора на координатные оси обычно находят путем раскрытия определителя по элементам первой строки:
Пример 8. Вычислить дивергенцию и ротор векторного поля
Решение. По определению, . В нашем случае , , . Отсюда находим , , . Следовательно, div .
Вычислим ротор поля F:
Отметим некоторые свойства ротора.
1. если – постоянный вектор, то rotF ;
2. rot rot , где c=const;
3. rot rot rot , т.е. ротор суммы двух векторов равен сумме роторов слагаемых;
4. если U – скалярная функция, а – векторная, то
Так как ротор имеет в каждой точке пространства иное значение, то ротор векторного поля образует новое векторное поле.
Ротор, определение (6.4.7) которого привязано к выбранной системе координат, на самом деле связан с полем инвариантно, т.е. не зависит от выбора системы координат, так как правая часть формулы (6.4.6) не зависит от такого выбора, а знание проекции вектора на любое направление определяет этот вектор однозначно.
На следующем рисунке (рис. 6.4.8) показано несколько простых примеров векторных полей и указан их ротор, который можно посчитать по формуле (6.4.7).
Рис. 6.4.8. Примеры векторных полей
а) F=const, rot ;
б) F=cyj, rot ;
Третий пример изображает поле скоростей при вращении абсолютно твердого тела вокруг оси Oz с угловой скоростью ; из этого рисунка следует, что при таком вращении поле линейных скоростей имеет постоянный ротор, равный удвоенному вектору угловой скорости. Коши показал, что при произвольном движении сплошной среды – газа, жидкости или твердого тела – каждый малый объем участвует одновременно в нескольких движениях, для которых поля скоростей имеют вид, изображенный на рисунке (поступательное, деформационное и вращательное движения). Так как ненулевой ротор получается лишь для вращательного движения, то мы видим, что при произвольном движении среды ротор поля линейных скоростей частиц равен в каждой точке удвоенному вектору угловой скорости соответствующей частицы. Конечно, в общем случае ротор получается в различных точках различным. Таким образом, при течении жидкости или газа отличие ротора поля линейных скоростей от нуля указывает на наличие завихренности, чем и объясняется название «ротор».
Особенно простой вид имеет ротор плоского поля
действительно, в силу формулы (6.4.7) получаем в этом случае
Пример 9. Найти ротор поля =grad .
Решение. Координаты вектора поля, образованного градиентами скалярной функции равны
Найдем ротор в произвольной точке
Данное поле градиентов не имеет вихрей.
Пример 10. Найти максимальную плотность циркуляции векторного поля z 2 y; x 2 z; y 2 x> в точке Р0(1;1;1).
Решение. Найдем координаты ротора в произвольной точке
Координаты ротора в точке Р0(1;1;1) равны
Максимальная плотность циркуляции поля в точке Р0(1;1;1) равна длине ротора
Пример 11. Найти направление, вокруг которого плотность циркуляции векторного поля zx, xy, yz> в точке Р(2;1;2) максимальна.
Решение. Координаты ротора в произвольной точке равны
Его координаты в точке Р(2;1;2):
Направление, вокруг которого плотность циркуляции максимальна, является направлением ротора. Найдем его направляющие косинусы:
Зная углы, которые образует ротор с координатными осями, легко найти направление, вокруг которого плотность циркуляции максимальна.
Ремонт обмоток электрических машин. Бандажирование и балансировка роторов и якорей. Сборка и испытание электрических машин
Обмотка является одной из наиболее важных частей электрической машины. Надежность машин в основном определяется качеством обмоток, поэтому к ним предъявляются требования электрической и механической прочности, нагревостойкости, влагостойкости.
Подготовка машин к ремонту заключается в подборе обмоточных проводов, изоляционных, пропиточных и вспомогательных материалов.
Технология капитального ремонта обмоток электрических машин включает следующие основные операции:
очистка пазов сердечника от старой изоляции;
ремонт сердечника и механической части машины;
очистка катушек обмотки от старой изоляции;
подготовительные операции для изготовления обмотки;
изготовление катушек обмотки;
изолирование сердечника и обмоткодержателей;
укладывание обмотки в паз;
пайка соединений обмотки;
крепление обмотки в пазах;
сушка и пропитка обмотки.
Ремонт обмоток статоров. Изготовление обмотки статора начинают с намотки отдельных катушек на шаблоне. Чтобы правильно выбрать размер шаблона, необходимо знать основные размеры катушек, главным образом их прямолинейной и лобовой частей. Размеры катушек обмотки демонтируемых машин определяют путем замеров старой обмотки.
Катушки всыпных обмоток статоров изготавливают обычно на универсальных шаблонах (рис. 5).
Такой шаблон представляет собой стальную плиту 1, которая при помощи
приваренной к ней втулки 2 соединяется со шпинделем намоточного станка. Плита имеет форму трапеции.

Рисунок 5 — Универсальный намоточный шаблон:
1 — плита; 2 — втулка; 3 — шпилька; 4 — ролики
В ее прорези установлены четыре шпильки, закрепленные гайками. При намотке катушек разной длины шпильки перемещают в прорезях. При намотке катушек разной ширины шпильки переставляют с одних прорезей в другие.
В обмотках статора машин переменного тока обычно несколько соседних катушек соединяют последовательно, и они образуют катушечную группу. Чтобы избежать лишних паечных соединений, все катушки одной катушечной группы наматывают цельным проводом. Поэтому на шпильки 3 надевают ролики 4, выточенные из текстолита или алюминия. Число желобков на ролике равно наибольшему числу катушек в катушечной группе, размеры желобков должны быть такими, чтобы в них могли поместиться все проводники катушки.
Катушки двухслойной обмотки укладывают в пазы сердечника группами, как они были намотаны на шаблоне. Провода распределяют в один слой и кладут стороны катушек, которые прилегают к пазу. Другие стороны катушек не укладывают в пазы до тех пор, пока не будут уложены нижние стороны катушек во все пазы. Следующие катушки кладут одновременно верхними и нижними сторонами.
Между верхними и нижними сторонами катушек в пазах устанавливают изоляционные прокладки из электрокартона, согнутого в виде скобочки, а между лобовыми частями — из лакоткани или листов картона с наклеенными на них кусочками лакоткани.
Изготовление обмотки с закрытыми пазами имеет ряд особенностей. Пазовую изоляцию таких обмоток делают в виде гильз из электрокартона и лакоткани. Предварительно по размерам пазов машины изготовляют стальной дорн, который представляет собой два встречных клина. Дорн должен быть меньше паза на толщину гильзы. Затем по размерам старой гильзы нарезают заготовки из электрокартона и лакоткани на полный комплект гильз и приступают к их изготовлению. Нагревают дорн до 80 — 100 °С и плотно обертывают заготовкой, пропитанной лаком. Сверху на заготовку вполнахлестку плотно укладывают хлопчатобумажную ленту. После охлаждения дорна до температуры окружающей среды разводят клинья и снимают готовую гильзу. Перед намоткой помещают гильзы в пазы статора, а затем заполняют их стальными прутками, диаметр которых должен быть на 0,05 — 0,1 мм больше диаметра изолированного обмоточного провода. От бухты отрезают кусок провода, необходимый для намотки одной катушки. Длинный провод усложняет намотку, при этом нередко повреждается изоляция из-за частой протяжки его через паз.
Изоляцию лобовых частей обмотки машин на напряжение до 660 В, предназначенных для работы в нормальной среде, выполняют стеклолентой ЛЭС, причем каждый следующий слой полуперекрывает предыдущий. Каждую катушку группы обматывают, начиная от торца сердечника. Сначала обматывают лентой часть изоляционной гильзы, которая выступает из паза, а затем часть катушки до конца выгиба. Середины головок группы обматывают стеклолентой вполнахлестку. Конец ленты закрепляют на головке клеем или плотно пришивают к ней. Провода обмотки, которые лежат в пазе, удерживают с помощью пазовых клиньев, изготавливаемых из бука, березы, пластмассы, текстолита или гетинакса. Клин должен быть на 10 — 15 мм длиннее сердечника и на 2 — 3 мм короче пазовой изоляции и толщиной не менее 2 мм. Для влагоустойчивости деревянные клинья «варят» 3 — 4ч в олифе при 120 — 140 °С.
Клинья забивают в пазы средних и малых машин молотком и с помощью деревянной надставки, а в пазы крупных машин — пневматическим молотком. Затем собирают схему обмотки. Если фаза обмотки намотана отдельными катушками, их последовательно соединяют в катушечные группы.
За начало фаз принимают выводы катушечных групп, которые выходят из пазов, расположенных около выводного щитка. Эти выводы отгибают к корпусу статора и предварительно соединяют катушечные группы каждой фазы, скручивают зачищенные от изоляции концы проводов катушечных групп.
После сборки схемы обмотки проверяют электрическую прочность изоляции между фазами и на корпус, а также правильность ее соединения. Для этого используют самый простой способ — кратковременно подключают статор к сети (127 или 220 В), а затем к поверхности его расточки прикладывают стальной шарик (от шарикоподшипника) и отпускают его. Если шарик вращается по окружности расточки, значит схема собрана правильно. Такую проверку можно также осуществить с помощью вертушки. В центре диска из жести пробивают отверстие, укрепляют его гвоздем на торце деревянной планки, а затем эту вертушку помещают в расточку статора, который подключен к электрической сети. Если схема собрана правильно, диск будет вращаться.
Бандажирование роторов и якорей
При вращении роторов и якорей электрических машин возникают центробежные силы, стремящиеся вытолкнуть обмотку из пазов и отогнуть ее лобовые части. Чтобы противодействовать центробежным силам и удержать обмотку в пазах, используют расклиновку и бандажирование обмоток роторов и якорей.
Применение способа крепления обмоток (клиньями или бандажами) зависит от формы пазов ротора или якоря. При открытой форме пазов используют бандажи или клинья. Пазовые части обмоток в сердечниках якорей и роторов закрепляют при помощи клиньев или бандажей из стальной бандажной проволоки либо стеклоленты, а также одновременно клиньями и бандажами; лобовые части обмоток роторов и якорей — бандажами. Надежное крепление обмоток имеет важное значение, поскольку необходимо для противодействия не только центробежным силам, но и динамическим усилиям, воздействию которых подвергаются обмотки при редких изменениях в них тока. Для бандажирования роторов применяют стальную луженую проволоку диаметром 0,8 — 2 мм, обладающую большим сопротивлением на разрыв.
Перед намоткой бандажей лобовые части обмотки осаживают ударами молотка через деревянную прокладку, чтобы они ровно располагались по окружности. При бандажировании ротора пространство под бандажами предварительно покрывают полосками электрокартона, чтобы создать изоляционную прокладку между сердечником ротора и бандажом, выступающую на 1 — 2 мм по обеим сторонам бандажа. Весь бандаж наматывают одним куском проволоки, без паек. На лобовых частях обмотки во избежание их вспучивания накладывают витки проволоки от середины ротора к его концам. При наличии у ротора специальных канавок проволоки бандажа и замки не должны выступать над канавками, а при отсутствии канавок толщина и расположение бандажей должны быть такими, какими они были до ремонта. Скобки, устанавливаемые на роторе, следует размещать над зубцами, а не над пазами, при этом ширина каждой из них должна быть меньше ширины верхней части зубца. Скобки на бандажах расставляют равномерно по окружности роторов с расстоянием между ними не более 160 мм. Расстояние между двумя соседними бандажами должно быть 200—260 мм. Начало и конец бандажной проволоки заделывают двумя замочными скобками шириной 10—15 мм, которые устанавливают на расстоянии 10 — 30 мм одна от другой. Края скобок завертывают на витки бандажа и. запаивают припоем ПОС 40.
Полностью намотанные бандажи для увеличения прочности и предотвращения их разрушения центробежными усилиями, создаваемыми массой обмотки при вращении ротора, пропаивают по всей поверхности припоем ПОС 30 или ПОС 40. Пайку бандажей производят электродуговым паяльником с медным стержнем диаметром 30 — 50 мм, присоединяемым к сварочному трансформатору. В ремонтной практике нередко проволочные бандажи заменяют выполненными стеклолентами из однонаправленного (в продольном направлении) стеклянного волокна, пропитанного термореактивными лаками. Для наматывания бандажей из стеклоленты применяют то же оборудование, что и для бандажирования стальной проволокой, но дополненное приспособлениями в. виде натяжных роликов и укладчиков ленты.
В отличие от бандажирования стальной проволокой ротор до наматывания на него бандажей из стеклоленты прогревают до 100 °С. Такой прогрев необходим потому, что при наложении бандажа на холодный ротор остаточное напряжение в бандаже при его запекании снижается больше, чем при бандажировании нагретого. Сечение бандажа из стеклоленты должно не менее чем в 2 раза превосходить сечение соответствующего бандажа из проволоки. Крепление последнего витка стеклоленты с нижележащим слоем происходит в процессе сушки обмотки при спекании термореактивного лака, которым пропитана стеклолента. При бандажировании обмоток роторов стеклолентой не применяют замки, скобки и подбандажную изоляцию что является преимуществом этого способа.
Балансировка роторов и якорей
Отремонтированные роторы и якоря электрических машин подвергают статической, а при необходимости и динамической балансировке в сборе с вентиляторами и другими вращающимися частями. Балансировку производят на специальных станках для выявления неуравновешенности (дисбаланса) масс ротора или якоря, являющейся частой причиной возникновения вибрации при работе машины.
Ротор и якорь состоят из большого количества деталей и поэтому распределение масс в них не может быть строго равномерным. Причины неравномерного распределения масс — разная толщина или масса отдельных деталей, наличие в них раковин, неодинаковый, вылет лобовых частей обмотки и др. Каждая из деталей, входящих: в состав собранного ротора или якоря, может быть неуравновешенной вследствие смещения ее осей инерции от оси вращения. В собранном роторе и якоре неуравновешенные массы, отдельных деталей в зависимости от их расположения могут суммироваться или взаимно компенсироваться. Роторы и якоря, у которых главная центральная ось инерции не совпадает с осью вращения, называют неуравновешенными.
Неуравновешенность, как правило, складывается из суммы двух неуравновешенностей — статической и динамической. Вращение статически и динамически неуравновешенного ротора и якоря вызывает вибрацию, способную разрушить подшипники и фундамент машины. Разрушающее воздействие неуравновешенных роторов и якорей устраняют путем их балансировки, которая заключается в определении размера и места неуравновешенной массы. Неуравновешенность определяют статической или динамической балансировкой. Выбор способа балансировки зависит от требуемой точности уравновешивания, которой можно достигнуть на имеющемся оборудовании. При динамической балансировке получаются более высокие результаты компенсации неуравновешенности (меньшая остаточная неуравновешенность), чем при статической.
Для определения неуравновешенности ротор выводят из равновесия легким толчком. Неуравновешенный ротор (якорь) будет стремиться возвратиться в такое положение, при котором его тяжелая сторона окажется внизу. После остановки ротора отмечают мелом место, оказавшееся в верхнем положении. Прием повторяют несколько раз, чтобы проверить, останавливается ли ротор (якорь) всегда в этом, положении. Остановка ротора в одном и том же положении указывает на смещение центра тяжести.
В отведенное для балансировочных грузов место (чаще всего это внутренний диаметр обода нажимной шайбы) устанавливают пробные грузы, прикрепляя их с помощью замазки. После этого повторяют прием балансировки. Прибавляя или уменьшая массу грузов, добиваются остановки ротора в любом, произвольно взятом положении. Это означает, что ротор статически уравновешен, т. е. его центр тяжести совмещен с осью вращения. По окончании балансировки пробные грузы заменяют одним такого же сечения и массы, равной массе пробных грузов и замазки и уменьшенной на массу части электрода, которая пойдет на приварку постоянного груза. Неуравновешенность можно компенсировать высверливанием соответствующей части металла с тяжелой стороны ротора.
Более точной, чем на призмах и дисках является балансировка на специальных весах. Балансируемый ротор устанавливают шейками вала на опоры рамы, которая может поворачиваться вокруг своей оси на некоторый угол пoвoрачивая балансируемый ротор, добиваются наибольшего показания индикатора J, которое будет при условии расположения центра тяжести ротора.
Добавлением к грузу дополнительного груза—рамки с делениями добиваются уравновешивания ротора, которое определяют по стрелке индикатора. В момент уравновешивания стрелка совмещается с нулевым делением.
Если повернуть ротор на 180, его центр тяжести приблизится к оси качания рамы на двойной эксцентриситет смещения центра тяжести ротора относительно его оси. Об этом моменте судят по наименьшему показанию индикатора. Ротор уравновешивают вторично передвижением грузовой рамки по линейке со шкалой, отградуированной в граммах на сантиметр. О величине неуравновешенности судят по показаниям шкалы весов.
Статическая балансировка применяется для роторов, вращающихся с частотой, не превышающей 1000 об/мин. Статически уравновешенный ротор (якорь) может иметь динамическую неуравновешенность, поэтому роторы, вращающиеся с частотой выше 1000 об/мин, чаще всего подвергают динамической балансировке, при которой одновременно устраняются оба вида неуравновешенностей — статическая и динамическая.
Закрепив постоянный груз, ротор подвергают проверочной балансировке и при удовлетворительных результатах передают в сборочное отделение для сборки машины.
Сборка и испытание электрических машин Сборка — завершающий этап ремонта электрической машины, в процессе которого соединяют ротор со статором при помощи подшипниковых щитов с подшипниками и собирают остальные детали машины. Как правило сборка любой машины ведется в последовательности, обратной разборке.
Сборку машины ведут в такой последовательности, чтобы каждая устанавливаемая деталь постепенно приближала ее к собранному состоянию и в то же время не вызывала необходимости переделок и повторения операции.
Технологическая последовательность выполнения основных сборочных
работ и содержание производимых при этом операций приведены ниже на примере сборки машины постоянного тока серии П.
Сборку машины постоянного тока П-41 (рис. 6) производят следующим образом. Надевают на главные полюса катушки возбуждения, устанавливают полюса с катушками в станине 16 согласно маркировке, сделанной при разборке, и крепят их болтами. Проверяют шаблоном расстояния между полюсными наконечниками, штихмасом — расстояния между противоположными полюсами.

Рисунок 6 — Машина постоянного тока П-41
Надевают на добавочные полюса 13 катушки, вставляют полюса с катушками в станину 16 согласно маркировке, сделанной при разборке, и крепят их болтами. Проверяют шаблоном расстояния между полюсными наконечниками главных и добавочных полюсов, а штихмасом — расстояния между противоположными добавочными полюсами. Соединяют катушки главных и добавочных полюсов согласно схеме соединений. Проверяют полярность главных и, добавочных полюсов, а также величину вылета обмотки 12, расположенной в сердечнике 14 якоря. Насаживают на вал 7 вентилятор согласно пометкам, сделанным при разборке. Закладывают консистентную смазку в лабиринтовые канавки. Надевают на вал внутренние крышки 2 и 20 подшипников. Нагревают шарикоподшипники в масляной ванне или индукционным методом и насаживают их на вал с помощью приспособления, Закладывают в подшипники консистентную смазку. Вводят якорь в станину, пользуясь приспособлением. Собирают траверсу 6 вместе со щеткодержателями на приспособлении и притирают щетки. Привинчивают траверсу со щеткодержателями к подшипниковому щиту 5 и поднимают щетки из гнезд щеткодержателей. Надвигают на шарикоподшипник задний подшипниковый щит 18, приподнимают якорь за конец вала и надвигают подшипниковый щит на замок станины. Ввертывают болты подшипникового щита в отверстия торца станины, не затягивая их до отказа. Надвигают на шарикоподшипник 3 передний подшипниковый щит 5. Приподнимают якорь и вводят подшипниковый щит в замок станины. Ввертывают болты подшипникового щита в отверстия торца станины, не затягивая их до отказа. Проверяют легкость вращения якоря, постепенно затягивая болты подшипниковых щитов. Надевают крышку 4 шарикоподшипника и стягивают крышки 4 и 2 болтами. Закладывают консистентную смазку в лабиринтовые канавки. Надевают крышку 19 шарикоподшипника и крепят крышки 19 и 20 болтами. Проверяют легкость вращения якоря, вращая его за конец вала. Опускают щетки на коллектор. Проверяют расстояния между щетками разных пальцев по окружности коллектора и сдвиг щеток по длине коллектора. Проверяют расстояния между коллектором и щеткодержателями. Собирают зажимы 7 на дощечке 9 в коробке 8 и крепят к ней конденсаторы 10. Устанавливают собранную дощечку зажимов на переднем подшипниковом щите 5. Производят электрические соединения согласно схеме. Проверяют щупами расстояния между якорем и полюсами. Подводят к зажимам провода питания от сети. Производят пробную обкатку машины. В процессе обкатки проверяют работу щеток и подшипников. Щетки должны работать без искрения, подшипники — без шума. Окончив обкатку, закрывают коллекторные люки крышками. Отсоединяют провода питания и закрывают коробку зажимов крышкой. Сдают собранную машину мастеру или контролеру ОТК.
При выполнении сборочных работ электрослесарь должен помнить, что ротор электродвигателя, удерживаемый в центральном положении магнитным полем статора, должен иметь возможность перемещения («разбега») в осевом направлении. Это необходимо для того, чтобы вал ротора при малейшем смещении не стирал своими заточками торцы подшипников и не вызывал добавочных усилий или трении сопряженных частей машины. Величины осевого разбега, зависящие от мощности машины, должны быть: 2,5 — 4 мм при мощности 10—40 кВт и 4,5 — 6 мм при мощности 50—100 кВт.
У всех машин после ремонта проверяют нагрев подшипников и отсутствие в них посторонних шумов. У машин мощностью выше 50 кВт при частоте вращения более 1000 об/мин и у всех машин, имеющих частоту вращения свыше 2000 об/мин, измеряют величину вибрации.
Зазоры между активной сталью ротора и статора, измеренные в четырех точках по окружности, должны быть одинаковы. Размеры зазоров в диаметрально противоположных точках ротора и статора асинхронного электродвигателя, а также между серединами главных полюсов и якорем машины постоянного тока не должны отличаться более чем на ±10%.
Испытания электрических машин. В ремонтной практике встречаются главным образом следующие виды испытаний: до начала ремонта и в процессе его для уточнения характера неисправности; вновь изготовленных деталей машины; собранной после ремонта машины.
Испытания собранной после ремонта машины проводят по следующей программе:
проверка сопротивления изоляции всех обмоток относительно корпуса и между ними;
проверка правильности маркировки выводных концов;
измерение сопротивления обмоток постоянному току;
проверка коэффициента трансформации асинхронных двигателей с фазным ротором;
проведение опыта холостого хода; испытание на повышенную частоту вращения; испытание межвитковой изоляции; испытание электрической прочности изоляции.
В зависимости от характера и объема произведенного ремонта иногда ограничиваются выполнением лишь части перечисленных испытаний. Если испытания проводят до ремонта с целью выявления дефекта, то достаточно провести часть программы испытаний.
В программу контрольных испытаний асинхронных двигателей входят:
1) внешний осмотр двигателя и замеры воздушных зазоров между сердечниками;
2) измерение сопротивления изоляции обмоток относительно корпуса и между фазами обмоток;
3) измерение омического сопротивления обмотки в холодном состоянии;
4) определение коэффициента трансформации (в машинах с фазным ротором);
5) испытание машины на холостом ходу;
6) измерение токов холостого хода по фазам;
7) измерение пусковых токов в короткозамкнутых двигателях и определение кратности пускового тока;
8) испытание электрической прочности витковой изоляции;
9) испытание электрической прочности изоляции относительно корпуса и между фазами;
10)проведение опыта короткого замыкания;
11) испытание на нагрев при работе двигателя под нагрузкой.
В программу контрольных испытаний синхронных машин входят те же испытания за исключением п. 4, 7 и 10.
Контрольные испытания машин постоянного тока включают следующие операции:
внешний осмотр и измерение воздушных зазоров между сердечником якоря и полюсами;
измерение сопротивления изоляции обмоток относительно корпуса;
измерение омического сопротивления обмоток в холодном состоянии;
проверка правильности установки щеток на нейтралях;
проверка правильности соединения обмоток добавочных полюсов с
проверка согласованности полярностей катушек последовательного и параллельного возбуждений;
проверка чередования полярностей главных и добавочных полюсов;
испытание машины на холостом ходу;
испытание электрической прочности витковой изоляции;
испытание электрической прочности изоляции относительно корпуса;
испытание на нагрев при работе машины под нагрузкой.
Учебное пособие 800395
Таким образом, область устойчивой работы АД лежит между синхронной скоростью и критическим скольжением. В области между критическим скольжением и скольжением равным единице устойчивая работа АД не возможна. В нормальных условиях АД работает на устойчивой части своей механической характеристики. Нарушение устойчивой работы может быть вызвано увеличением механической мощности приводного механизма или снижением напряжения. Напряжение, при котором электромагнитная мощность АД становится равной механической мощности механизма, называется критическим (см. рис. 4.5). Значение критического напряжения согласно (4.6) определяется по формуле
| U кр 2 Р 0 x s . | (4.7) |
Зная значение критического напряжения, определяют уровень статической устойчивости как отдельного АД, так и узлов нагрузки путем расчета коэффициента запаса по напряжению
| K U | U 0 U кр | . | (4.8) |
| U 0 | |||
Для обеспечения устойчивости нагрузки коэффициент запаса по напряжению должен быть не менее 0,15 в нормальных и 0,1 в аварийных режимах ЭЭС [3]. Изменение частоты подводимого напряжения, также оказывает влияние на статическую устойчивость АД. Оценить влияние данного параметра можно, подставив в выражения (4.5), (4.6) и (4.7) сопротивление рассеяния в виде x s 2 L s f , тогда получим
| r | U 2 | |||||
| s | ; P | ; U | 4 Р L | f . | (4.9) | |
| 2 | кр | s | ||||
| кр | 2 L s f | м | 4 L s | f | 0 | |
Таким образом, из полученных формул видно, что критическое скольжение и максимальная мощность АД при понижении частоты увеличиваются, а критическое напряжение уменьшается. Следовательно, снижение частоты повышает устойчивость АД. Сделанный вывод справедлив только для режимов имеющих запасы по реактивной мощности. При дефиците реактивной мощности снижение частоты приводит к увеличению потребления реактивной мощности АД, что может вызвать настолько глубокое снижение напряжения, из-за которого нарушится устойчивость большей части потребителей. Поэтому по-
ложительное влияние снижения частоты на устойчивость АД может смениться отрицательным из-за роста потребления реактивной мощности. Таким образом, в каждом конкретном случае необходима проверка и оценка режимов, как при снижении частоты, так и напряжения. Статическая устойчивость синхронного двигателя оценивается так же, как и синхронного генератора, критерием dP 0 . При отсутствии АРВ максималь- d ная мощность и критическое напряжение определяются выражениями
| P | E q U | ; U | P x | d | . | (4.10) |
| 0 | ||||||
| M | x d | кр | E q |
4.4. Вторичные критерии устойчивости узлов нагрузки Применение полученных критериев устойчивости для узлов нагрузки с большим количеством разнотипных электродвигателей затруднено из-за сложности определения параметров эквивалентного двигателя. Поэтому на практике применяют другие критерии, позволяющие определить устойчивость нагрузки, используя её статические характеристики по напряжению. Наибольшее распространение получил критерий, предложенный проф. П.С. Ждановым. Данный критерий определяет статическую устойчивость по положительному знаку производной ЭДС генераторов электростанции либо ЭДС системы питающей нагрузку, по напряжению
| dE | 0 . | (4.11) |
| dU | ||
Для проверки устойчивости комплексного узла нагрузки по данному критерию сначала составляют эквивалентную схему замещения, показанную на рис. 4.7. Для данной схемы эквивалентная ЭДС определяется по формуле
| E Э | ( U | P H R Э Q H X Э | ) 2 ( | P H X Э | Q H R Э | ) 2 , | (4.12) |
| U | U | ||||||
где R Э ,Х Э – эквивалентные сопротивления питающей сети и генераторов. Рис. 4.7. Схема замещения для оценки устойчивости по критерию dE 0 dU
Далее строится зависимость Е э =f(U) по следующей методике. Сначала задаются параметры исходного режима эквивалентная ЭДС Е 0 , напряжение на нагрузке U 0 и мощности P 0 и Q 0 . Затем задаваясь новым меньшим значением напряжения на шинах нагрузки U 1 по статическим характеристикам, определяется значение P 1 и Q 1 соответствующие этому напряжению. Далее по формуле (4.12) находят новое значение ЭДС Е 1 . Проведя ряд таких расчетов для нескольких значений напряжения, строится график зависимости расчетных значений ЭДС Е Э от напряжения U (рис. 4.8). При Е Э =Е 0 установившиеся режимы возможны в точках а и b . В точке а
| производная | dE | 0 , следовательно, режим устойчив, в точке b — | dE | 0 — ре- |
| dU | dU | |||
жим не устойчив. Предельный режим определяется критическими значениями ЭДС Е кр и напряжения U кр в точке с , где dE 0 . dU Рис. 4.8. Зависимость ЭДС системы от напряжения на нагрузке При наличии нескольких узлов комплексной нагрузки в системе электроснабжения необходимо построить зависимости Е э =f(U) для каждого из них. Расчеты удобно вести, задаваясь значением напряжения на наиболее удалённой из нагрузок. Если узел нагрузки получает питание от нескольких электростанций, то оценку статической устойчивости удобно проводить, используя практический критерий устойчивости
| d Q | 0 , | (4.13) |
dU где Q Q Г Q Н — небаланс мощностей; Q Г — суммарная генерируемая в узел реактивная мощность. Для оценки статической устойчивости нагрузки по данному критерию необходимо построить зависимости реактивной мощности генерации Q Г и нагрузки Q Н от напряжения U на нагрузке. Зависимость Q Н = f(U) имеет вид приведенный на рис. 4.9. Характеристика реактивной мощности генерируемой в узел по расчетам режимов системы или по следующему уравнению
| Q Г | ( | Е Э U | ) 2 Р Н 2 | U | 2 | , | (4.14) |
| X | |||||||
| X Э | Э | ||||||
где Е Э – эквивалентная ЭДС генерирующих источников. Рис. 4.9. Характеристики реактивной мощности в узле нагрузки На рис. 4.9 приведена графическая зависимость Q Г0 = f(U) , соответствующая эквивалентной ЭДС Е 0 в исходном режиме. Графики Q Г0 и Q Н имеют две точки пересечения (точки а и b на рис. 4.9). В этих точках уравновешиваются как реактивные, так и активные мощности генерации и нагрузки. Точка а, соответствующая большему напряжению (а следовательно и меньшему скольже- нию), где d Q 0 , является точкой устойчивой работы, а точка b — неустойчи- dU вой. Для определения критических параметров в узле нагрузки, необходимо выполнить постепенное пошаговое утяжеление режима по различным параметрам, например увеличение мощности нагрузки, уменьшение ЭДС генерирующих источников или увеличение реактивного сопротивления питающей сети. В качестве примера на рис. 4.9 приведена зависимость Q Г1 , соответствующая меньшей ЭДС Е 1 . Предельный режим определяется критическим напряжением U кр в точке с , где d Q 0 . dU 4.5. Влияние конденсаторных батарей на устойчивость нагрузки В узлах нагрузки конденсаторные батареи (КБ) устанавливают для повышения уровня напряжения и для снижения потерь мощности от реактивных токов.
В тоже время включение конденсаторных установок может уменьшить запас по статической устойчивости двигательной нагрузки. Это связано с тем, что реактивная мощность КБ существенно зависит от напряжения в узле нагрузки:
| Q КБ С КБ U 2 , | (4.15) |
где С КБ –результирующая емкость батареи. Графические зависимости реактивных мощностей в узле нагрузке при включении КБ (рис. 4.10) показывают что суммарная кривая Q Н -Q КБ оказывается более пологой и значение критического напряжения увеличивается с U кр1 до U кр2 . В результате запас устойчивости при включении конденсаторов уменьша-
| ется от значения К U 1 | U 0 U КР 1 | до К U 2 | U 0 U КР 2 | , что отрицательно сказывает- |
| U 0 | ||||
| U 0 | ||||
ся на устойчивости двигательной нагрузки. Рис. 4.10. Характеристики реактивных мощностей при включении КБ в узел нагрузки Уменьшить отрицательное влияние КБ на устойчивость нагрузки, можно добавив в состав узла синхронные двигатели с регулированием возбуждения. В любом случае при установке в узел КБ необходимо проводить дополнительные расчеты статической устойчивости с учетом всех факторов и особенностей системы электроснабжения. 4.6. Динамическая устойчивость узлов нагрузки Как уже отмечалось динамическую устойчивость, определяют электромеханические переходные процессы, проходящие в ЭЭС при больших возмущениях. На устойчивость двигательной нагрузки оказывают влияние следующие большие возмущения:
— отключение отдельных элементов в распределительных и питающих электрических сетях, когда напряжение резко уменьшается; — возникновение КЗ в системе электроснабжения, когда напряжение резко уменьшается, а затем восстанавливается при отключении КЗ; — отключение питания узла нагрузки с последующим его включением, когда в течение определённого промежутка времени наступает перерыв в электроснабжении потребителей; — изменение механического момента на валу двигателя при увеличении нагрузки на приводном механизме с последующим восстановлением прежнего момента. 4.6.1. Динамическая устойчивость двигателей при изменении напряжения Проанализируем динамическую устойчивость двигательной нагрузки при изменении напряжения. Предположим, что в нормальном установившемся режиме при напряжении U 0 асинхронный двигатель работает со скольжением s 0 , а синхронный с углом δ 0 (рис. 4.11). При резком снижении напряжения возникает электромеханический переходной процесс определяемый характеристиками М 1 и М мх , приведёнными на рис. 4.11. При снижении напряжения момент двигателей резко уменьшается точка с и они начинают тормозиться, скольжение s АД и угол δ СД возрастают. Если при этом максимальный электромагнитный момент окажется больше механического (М м1 >М мх ), то в точке b возникает новый установившейся режим АД со скольжением s 1 меньше критического s кр (см. рис. 4.11,а). Для СД новый установившейся режим наступит в точке b с углом δ 1 , так как f у ,
10.4. Ротор векторного поля
Понятие ротора и его вычисление. С понятием циркуляции тесно связано понятие ротора или вихря. Циркуляция характеризует вращательную способность или завихрённость поля вдоль некоторого контура, а локальной характеристикой поля является ротор.
ассмотрим сначала плоское векторное поле и какой-либо контур
и какой-либо контур , окружающий выбранную точку
, окружающий выбранную точку (рис. 8). Площадь, ограниченная контуром
(рис. 8). Площадь, ограниченная контуром , равнаs. Тогда отношение
, равнаs. Тогда отношение  есть средняя плотность циркуляции вектора
есть средняя плотность циркуляции вектора на площадкеs. Плотность циркуляции в точке
на площадкеs. Плотность циркуляции в точке  характеризуется пределом, когда
характеризуется пределом, когда , т.е.
, т.е.
(5)
Если этот предел существует, то он даёт величину завихрённости поля в точке .
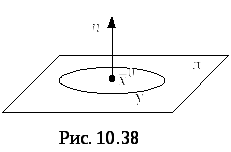
Если векторное поле  – пространственное, то можно говорить о завихрённости в каком-либо направлении
– пространственное, то можно говорить о завихрённости в каком-либо направлении . Проведём через точку
. Проведём через точку плоскость
плоскость , перпендикулярную выбранному направлению
, перпендикулярную выбранному направлению , и рассмотрим в ней какой-либо контур
, и рассмотрим в ней какой-либо контур , охватывающий точку
, охватывающий точку (рис.8). Тогда предел (5) даёт завихрённость поля в направлении
(рис.8). Тогда предел (5) даёт завихрённость поля в направлении .
.
Определение 3. Ротором векторного поля  в точке
в точке называется вектор, проекция которого на направление
называется вектор, проекция которого на направление равна пределу отношения циркуляции векторного поля по плоскому контуру
равна пределу отношения циркуляции векторного поля по плоскому контуру , перпендикулярному этому направлению, к величине площади
, перпендикулярному этому направлению, к величине площади , охваченной контуром
, охваченной контуром , когда
, когда стягивается в точку
стягивается в точку .
.
. (6)
Заметим, что данное определение не зависит от выбора системы координат, т.е. оно инвариантно.
Получим формулу вычисления в декартовой системе координат.
Теорема5. Пусть в каждой точке  задано непрерывно дифференцируемое поле
задано непрерывно дифференцируемое поле . Тогда в точке
. Тогда в точке существует
существует  ,вычисляемый по формуле:
,вычисляемый по формуле:

. (7)
Вычислим сначала проекцию вектора  на осьOz. Пусть
на осьOz. Пусть  – контур, лежащий в плоскостиОху, ограничивающей область G. Воспользуемся формулой Грина (рис. 9)
– контур, лежащий в плоскостиОху, ограничивающей область G. Воспользуемся формулой Грина (рис. 9)
.
Применим к двойному интегралу теорему о среднем:
и подставим последнее в (6):
 Аналогично вычисляем проекции
Аналогично вычисляем проекции  на орты
на орты  и
и .
.
Вектор символически записывается следующим образом:
,

где – оператор Гамильтона.
Легко доказать следующие свойства :

.

.

.
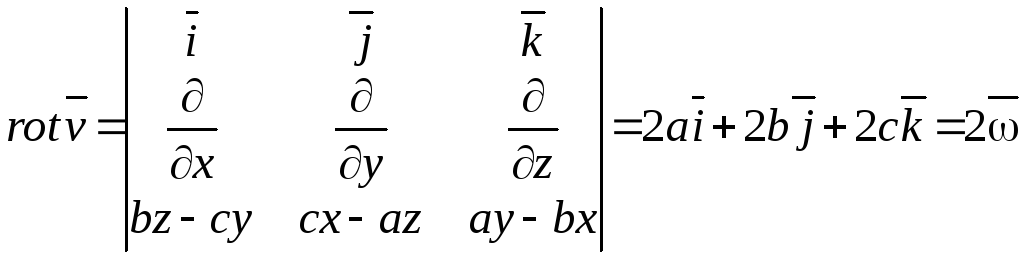
Пример 3. Найти ротор поля скорости  твердого тела, вращающегося вокруг неподвижной точки с мгновенной угловой скоростью
твердого тела, вращающегося вокруг неподвижной точки с мгновенной угловой скоростью  .
.
Решение. Найдём сначала линейную скорость  . Из курса физики известно, что
. Из курса физики известно, что  .
.

.
;
.
Таким образом, , характеризуя «вращательную компоненту» поля скоростей, равен удвоенной скорости вращения.

Пример 4. Найти .
.
.
Следовательно, вектор  параллелен вектору
параллелен вектору .
.
С помощью  можно обобщить формулу Грина на пространственный случай. Таким обобщением является формула Стокса, которая связывает циркуляцию векторного поля с потоком ротора через поверхность, натянутую на этот контур. При этом говорят, что поверхность можно натянуть на контур
можно обобщить формулу Грина на пространственный случай. Таким обобщением является формула Стокса, которая связывает циркуляцию векторного поля с потоком ротора через поверхность, натянутую на этот контур. При этом говорят, что поверхность можно натянуть на контур , если существует кусочно-гладкая ориентированная поверхность
, если существует кусочно-гладкая ориентированная поверхность , лежащая в областиV и имеющая
, лежащая в областиV и имеющая  своей границей.
своей границей.
Трехмерную область V будем называть поверхностно-односвязанной, если на любой контур  можно натянуть поверхность
можно натянуть поверхность , целиком лежащую в V. Примеры поверхностно неодносвязной области – шар, через который проходит цилиндрический туннель.
, целиком лежащую в V. Примеры поверхностно неодносвязной области – шар, через который проходит цилиндрический туннель.
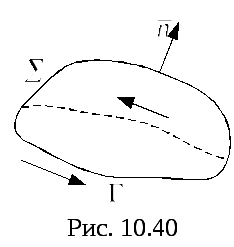
усть – ориентированная поверхность, натянутая на контур
– ориентированная поверхность, натянутая на контур рис.10. Нормаль к поверхности
рис.10. Нормаль к поверхности выберем таким образом, чтобы направление вектора
выберем таким образом, чтобы направление вектора соответствовало положительному обходу контура
соответствовало положительному обходу контура . Направление обхода контура
. Направление обхода контура будем считать положительным, если при обходе по контуру
будем считать положительным, если при обходе по контуру область
область остается все время слева. Если смотреть с конца вектора
остается все время слева. Если смотреть с конца вектора , то обход контура осуществляется против часовой стрелки. В этом случае говорят, что направление обхода
, то обход контура осуществляется против часовой стрелки. В этом случае говорят, что направление обхода и ориентация
и ориентация согласованы.
согласованы.
Теорема 6.(Стокс) Пусть V — поверхностно-односвязаная область,  — кусочно-гладкий контур в V и
— кусочно-гладкий контур в V и  — кусочно-гладкая поверхность, натянутая на
— кусочно-гладкая поверхность, натянутая на  и лежащая в V. Пусть в области V задано векторное поле
и лежащая в V. Пусть в области V задано векторное поле  , непрерывное и дифференцируемое в во всех точках области и
, непрерывное и дифференцируемое в во всех точках области и также непрерывен в V. Тогда циркуляция поля
также непрерывен в V. Тогда циркуляция поля  по контуру
по контуру  равна потоку ротора
равна потоку ротора  через
через  , т.е. справедлива формула Стокса
, т.е. справедлива формула Стокса
, (8)
причём направление обхода  и ориентация
и ориентация согласованы.
согласованы.
Разобьём поверхность  наn частей
наn частей  , ограниченных контурами
, ограниченных контурами ,
, . Рассмотримi-й элемент
. Рассмотримi-й элемент  поверхности
поверхности . Возьмём произвольную точку
. Возьмём произвольную точку  и проведём через неё нормаль
и проведём через неё нормаль  и касательную плоскость
и касательную плоскость  к
к  . Обозначим через
. Обозначим через  проекцию контура
проекцию контура ,
, – площадь поверхности
– площадь поверхности , а через
, а через – площадь проекции
– площадь проекции на
на  . Из определения ротора следует равенство
. Из определения ротора следует равенство

.
При достаточно мелком разбиении это равенство будет справедливо для контура  поверхности
поверхности , т.е.
, т.е.

.
Суммируя последнее равенство по всем , получим
. (9)
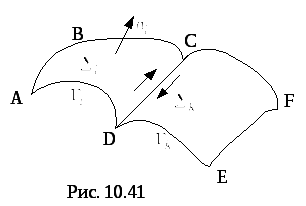
ри объединении двух соседних участков поверхностей  и
и  , в соответствии с правилом согласования направления обхода контура и нормали, их общая часть границы обходиться в противоположных направлениях (рис. 11).
, в соответствии с правилом согласования направления обхода контура и нормали, их общая часть границы обходиться в противоположных направлениях (рис. 11).

.
Суммируя контурные интегралы по всем i, получаем интеграл по общему контуру, т.е. . Тогда (9) принимает вид
.
Сумма в правой части является интегральной для поверхностного интеграла  . Переходя здесь к пределу при
. Переходя здесь к пределу при
 , получим формулу Стокса (8).
, получим формулу Стокса (8).
Замечание. Из формулы Стокса следует, что если  и
и – две поверхности, натянутые на контур
– две поверхности, натянутые на контур , то потоки поля
, то потоки поля через них равны.
через них равны.
Теорема 7. (необходимое и достаточное условие потенциальности векторного поля) Для того, чтобы непрерывно дифференцируемое векторное поле  было потенциальным в поверхностно-односвязанной области V необходимо и достаточно, чтобы оно было безвихревым, т.е.
было потенциальным в поверхностно-односвязанной области V необходимо и достаточно, чтобы оно было безвихревым, т.е. 
 .
.
Необходимость. Пусть поле  потенциально, тогда существует его потенциал
потенциально, тогда существует его потенциал , т.е.
, т.е. . Получаем
. Получаем

.
Достаточность. Пусть поле  безвихревое поле, т.е.
безвихревое поле, т.е. для любой точки
для любой точки . Так как областьV поверхностно-односвязная, то по теореме Стокса для произвольного контура
. Так как областьV поверхностно-односвязная, то по теореме Стокса для произвольного контура  существует интеграл
существует интеграл , который не зависит от пути интегрирования, т.е. кривой, соединяющей точки
, который не зависит от пути интегрирования, т.е. кривой, соединяющей точки и
и . Если точка
. Если точка зафиксирована, то интеграл является функцией
зафиксирована, то интеграл является функцией . Обозначим её
. Обозначим её
.
Покажем, что . Так как интеграл не зависит от формы пути интегрирования, то

 , т.к.
, т.к.  .
.
 В качестве пути интегрирования взят отрезок, параллельный оси Ох, согласно определению производной, теоремы о среднем, а также в силу непрерывности
В качестве пути интегрирования взят отрезок, параллельный оси Ох, согласно определению производной, теоремы о среднем, а также в силу непрерывности  , получаем
, получаем 

.
Аналогично показывается, что  и
и , следовательно
, следовательно .
.

Пример 5. Показать, что поле потенциально и найти его потенциал.


.
Так как  , то поле
, то поле потенциально. Найдем потенциал
потенциально. Найдем потенциал поля
поля .
.
Фиксируем точку  , рассмотрим произвольную точку
, рассмотрим произвольную точку . Тогда
. Тогда .
.

инию интегрирования (в силу независимости такого интеграла от форму пути) выберем в виде ломанной (рис.12), где отрезок
(рис.12), где отрезок параллелен осиОх, отрезок
параллелен осиОх, отрезок  – осиОу, а отрезок
– осиОу, а отрезок  – осиОz. Вдоль
– осиОz. Вдоль  имеем
имеем ,
, , а следовательно,
, а следовательно, . Вдоль
. Вдоль постоянно
постоянно и
и , откуда
, откуда , а вдоль
, а вдоль обе переменные
обе переменные и
и – постоянны, а это значит, что
– постоянны, а это значит, что . Тогда
. Тогда




.