3.6. Механическая и угловая характеристики
Из теории электрических машин известно, что синх-ронный двигатель (СД) имеет трехфазную обмотку статора, на которую подается трехфазный ток, создающий вращающееся магнитное поле, подобно АД. На роторе имеются две обмотки: пусковая (демпферная) обмотка и обмотка возбуждения, на которую подается постоянный ток. В синхронном режиме ротор вращается со скоростью магнитного поля статора, то есть синхронно с ним.
Синхронные двигатели большой мощности (200 кВт и вы-
ше) дешевле асинхронных и обладают, кроме того, компенсационными свойствами. В последнее время, в связи с развитием силовой полупроводниковой техники, в частности, частотных преобразователей, стало возможным применять СД в регулируемых приводах.
Различают СД с неявнополюсными роторами при скорости ≥1500 об/мин и явнополюсными роторами при частотах вращения 1000 об/мин и менее (до 100 об/мин).
3.5.1. Электромеханическое преобразование энергии
в синхронном двигателе
Принципиальная электрическая схема синхронной машины с обмоткой возбуждения и демпферной обмоткой приведена на рис. 3.35. Там же показано направление потоков мощности.
Обмотка статора трехфазная, аналогичная статорной обмотке асинхронного двигателя. При подаче трехфазного напряжения на обмотку статора в ней создается вращающееся магнит- ное поле, синхронная скорость которого равна 1
Рис. 3.47. Схема и потоки энергии в синхронном
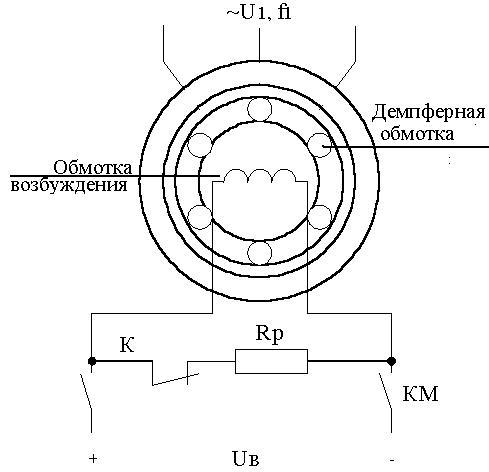
Рис. 3.48. Принципиальная электрическая схема СД
Вращающееся магнитное поле наводит ЭДС в пусковой обмотке, расположенной на роторе, и по обмотке протекает ток, который способствует возникновению электромагнитного момента, подобно асинхронному двигателю. Под действием этого момента ротор начинает вращаться, достигая подсинхронной скорости, когда в обмотку возбуждения подается по
стоянный ток. Возникает постоянное магнитное поле, при
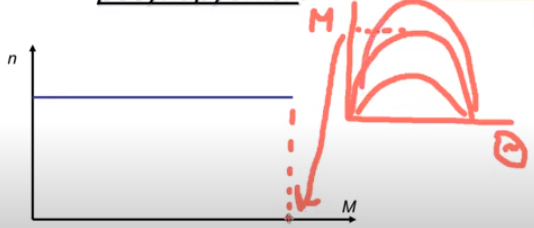
взаимодействии которого с вращающимся магнитным полем статора двигатель втягивается в синхронизм и начинает работать на механической характеристике (рис. 3.49) со статической жесткостью
Рис. 3.49. Механическая характеристика СД
При этом возникает ряд вопросов, связанных с дальнейшей работой синхронного двигателя:
1.Какова зависимость момента М от параметров СД и нагрузки?
2. Какие условия выхода двигателя из синхронизма?
3. От чего зависит максимальный момент Мmaх двигателя и можно ли управлять им?
Рассмотрим векторную диаграмму СД c явнополюсным ротором в осях d и q, причем обмотка возбуждения размещена на оси d (рис.3.50). На этой диаграмме приняты следующие обозначения:
— векторы фазных э.д.с. обмотки статора и нап-
— вектор фазного тока статора;
xc — индуктивное сопротивление фазы статора;
xd — индуктивное сопротивление фазы статора по продольной оси d;
Рис. 3.50. Векторная диаграмма СД
xq — индуктивное сопротивление фазы статора попопереч-ной оси q;
φ – фазовый угол сдвига между током статора и напряже-нием сети;
θ – внутренний угол сдвига между э.д.с. статора и напря-жением сети;
ψ — угол сдвига между э.д.с. статора и током статора.
Момент, развиваемый машиной, может быть определен на основе упрощенной векторной диаграммы напряжений синхронного двигателя, приведенной на рис. 3.50. Диаг-рамма не учитывает активного падения напряжения в об-мотке статора. Это допущение упрощает определение мощности и момента двигателя и не вносит значительной
ошибки. Электромагнитная мощность при этом равна мощности, потребляемой из сети, т. е.
Из векторной диаграммы могут быть получены следующие соотношения:
φ = θ + ψ; (3.81)
sin θ = ; (3.82)
сos θ = ; (3.83)
sin ψ = ; (3.84)
cos ψ = . (3.85)
Подставляя в (3.80) значение угла φ из (3.81), будем иметь
Учитывая выражения (3.84) и (3.85), имеем
и с учетом выражений (3.82) и (3.83)
Выражение (3.86) называют угловой характеристикой СД и как следует из него, электромагнитный момент состоит из двух слагаемых:
- синхронного (основного) момента Мсин, пропорцио-нального индуктированной э.д.с. и sin θ ;
- реактивного момента, возникающего в двигателе без возбуждения из-за наличия явнополюсной системы.
В двигателе с неявнополюсной системой ха = хд и реактивный момент равен нулю.
Синхронный момент возрастает с увеличением угла θ и достигает своего максимального значения при θ = 90°; при дальнейшем увеличении угла 6 момент двигателя падает. Таким образом, устойчивая работа возможна при углах θ, не превышающих 90°.
Учитывая возможность толчков нагрузки, стараются иметь θном = 20 0 — 30°. При этих условиях перегрузочная способность синхронного двигателя будет:
В связи с тем, что синхронный момент прямо пропорционален первой степени напряжения и первой степени э. д. с. от магнитодвижущей силы основного возбуждения, перегрузочная способность двигателя может быть повышена в моменты пиков нагрузки увеличением возбуждения.

Рис. 3.51. Зависимость электромагнитного момента синхронного двигателя и его составляющих от угла θ.
Зависимость электромагнитного момента и его составляющих — синхронного и реактивного моментов — от угла θ представлена на рис. 3.51. Из кривых моментов следует, что у дви-
гателей с явнополюсной системой максимальное значение электромагнитного момента за счет влияния реактивного момента имеет иместо при θмакс < 90°.
Угловая и механическая характеристики сд.
СД работает в сети с выполнением условий согласования. После включения СД в сеть его частота меняться не может. Так как должны выполняться условия согласования, поле статора и ротор должны вращаться синхронно.
Механическая характеристика есть .
Максимальный момент определяется границей устойчивости двигателя в синхронизме.
Угловая характеристика
Меняя ток возбуждения, получаем максимальные моменты, как меньше, так и больше.
Предел саморегулирования – граница устойчивости СД в синхронизме.
Момент нагрузки не должен превышать максимального момента СД.
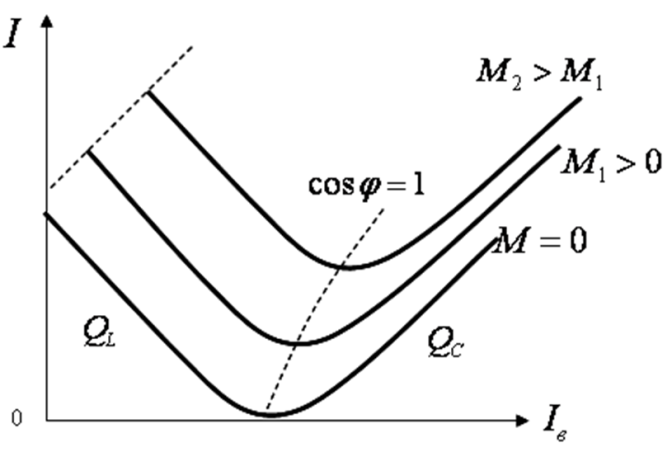
Регулирование коэффициента мощности сд, V-образные характеристики.

При изменении момента нагрузки происходит изменение активной мощности, которую СД вырабатывает. Активная мощность любого СД никак не регулируется, она зависит только от нагрузки:
В силу свойства саморегулирования двигатели создают момент вращения, равный моменту сопротивления:
СД отличается от прочих двигателей тем, что у ТАД или у ДПТ изменение момента всегда сопутствует изменению частоты, а у СД частота не меняется, меняется угол рассогласования. Чем больше угол рассогласования, тем больший момент передается от двигателя. Чем выше момент сопротивления, тем больший угол рассогласования, так как ротор начинает тормозиться относительно поля статора, а чем выше угол рассогласования, тем по угловой характеристике выше момент. Двигатель будет переходить в новое устойчивое состояние с большим углом рассогласования. Предел увеличения момента – достижение .
При больших моментах сопротивления СД может выпасть из синхронизма. Чтобы этого не происходило, повышают ток возбуждения ротора.
Реактивная потребляемая СД из сети мощность регулируется током возбуждения ротора (как в СГ).
Пусть ток чисто активный, реактивная мощность не потребляется.

Уменьшим ток возбуждения ( ). ЭДС по величине уменьшается. Строим ЭДС, затем вектор , затем ток . запаздывает относительно . Двигатель потребляет индуктивную мощность. Аналогично строится (опережает ). Двигатель потребляет емкостную мощность.
Так как момент нагрузки не меняется – , и :
V-образные характеристики
При малом токе возбуждения потребляемая мощность носит индуктивный характер, при большом – емкостной.
Существует граница регулирования реактивной мощности. Мы не можем делать очень маленький ток возбуждения, так как момент вращения двигателя становится меньше момента нагрузки. Двигатель выходит из синхронизма (частотная авария).
Обычно СД работает с перевозбуждением, чтобы улучшить коэффициент мощности энергосистемы (синхронный компенсатор).
Синхронный компенсатор.
Синхронный компенсатор – СД, работающий без нагрузки на валу. Он потребляет из сети только реактивную емкостную мощность. Это нужно для того, чтобы компенсировать реактивную мощность двигателей, которые включены в энергосистему.
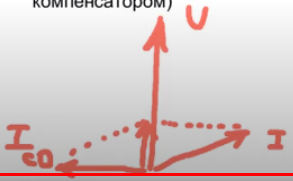
Допустим, есть ТАД, который потребляет из энергосистемы очень большой реактивный ток. Чтобы не гонять в энергосистеме по проводам большие реактивные токи, параллельно ТАД подключают СД, который работает без момента на валу, то есть не производит активной работы. При большом токе возбуждения он потребляет из энергосистемы реактивный ток . Складывая потребляемые токи СД и ТАД, видим, что ток, потребляемый от энергосистемы заметно меньше по величине, чем ток, который потреблялся бы просто ТАД. За счет этого увеличивается КПД энергосистемы, поскольку по проводам не бегает большой ток, и потери, пропорциональные квадрату тока, в линии электропередач не возникают.
9. Синхронные двигатели
9.1. Механические и угловые характеристики синхронного двигателя (сд)
Синхронные двигатели занимают в промышленных автоматизированных электроприводах значительное место и применяются главным образом для привода механизмов, скорость которых не требуется регулировать (компрессоры, вентиляторы, насосы, холодильные машины, преобразовательные агрегаты и т.д.) [1].
К достоинствам СД следует отнести простоту их конструкции по сравнению, например, с машинами постоянного тока, высокие энергетические показатели, определяющиеся в первую очередь компенсационными свойствами СД, относительно невысокую стоимость (СД большой мощности – выше 2000–3000 кВт дешевле асинхронных), возможность в будущем регулирования скорости и др.
Схема включения СД приведена на рисунке 9.1а.
По конструктивному исполнению статор СД такой же, как и у АД. Ротор выполняется с двумя обмотками: пусковой обмоткой ОП типа беличьей клетки (как у асинхронного короткозамкнутого двигателя) и обмоткой возбуждения ОВ постоянного тока. Первая из обмоток служит для асинхронного пуска СД, вторая – для его возбуждения в нормальном режиме работы.

Рис. 9.1. Схема включения синхронного двигателя (а) и механические характеристики (б)
Двигатель пускается в ход как асинхронный. При скорости  подается возбуждение, и двигатель втягивается в синхронизм:
подается возбуждение, и двигатель втягивается в синхронизм:  .
.
СД выполняются с пусковыми клетками двух типов (с различными активными сопротивлениями Rра пусковой обмотки ротора), что позволяет получить различные пусковые механические характеристики (характеристики 1 и 2, рис. 9.1б).
Выбор одной из двух указанных характеристик зависит от момента сопротивления производственного механизма. При пуске и вхождении двигателя в синхронизм необходимо выполнение условия [1,3]:

(9.1)
где  и
и  – пусковые моменты двигателя и механизма ИО;
– пусковые моменты двигателя и механизма ИО;  и
и  – входные моменты двигателя и механизма.
– входные моменты двигателя и механизма.
Двигатели, у которых пусковая клетка выполняется с повышенным активным сопротивлением, применяются обычно с большим значением статического момента при пуске (характеристика 2). При вентиляторном характере статического момента более приемлемы двигатели с механической характеристикой 1.
Обратим внимание на то обстоятельство, что пусковые клетки СД рассчитываются на кратковременный режим их работы продолжительностью 20–30 с. Увеличение времени пуска выше допустимого может привести к перегреву клетки и ее повреждению.
Связь между скольжением и моментом СД при работе на пусковой клетке приблизительно выражается формулой как у обычного АД.
Рабочая механическая характеристика СД от холостого хода до выпадения из синхронизма является горизонтальной прямой, т.е. при изменении нагрузки на валу двигателя его скорость остается постоянной (рис. 9.1б).

Однако мгновенные значения скорости ротора СД в процессе работы могут несколько отличаться от синхронной скорости , например, вследствие отставания ротора от поля статора при увеличении нагрузки на валу.

Для решения вопроса об устойчивой работе двигателя в таких случаях необходимо знать зависимость развиваемого им момента от угла внутреннего сдвига фаз между векторами ЭДС статора и напряжения сети (). Эта зависимость называется угловой характеристикой СД. Приведем эту зависимость в виде формулы (9.2) для неявнополюсной машины [1]:

, (9.2)
В формуле (9.2):  – фазная ЭДС статора;
– фазная ЭДС статора;  – фазное напряжение сети;
– фазное напряжение сети;  – угол внутреннего сдвига фаз;
– угол внутреннего сдвига фаз;  – индуктивное сопротивление статора.
– индуктивное сопротивление статора.
Зависимость момента синхронного двигателя от угла внутреннего сдвига фаз (угловая характеристика 1) приведена на рисунке 9.2.

Рис. 9.2. Угловые характеристики СД

Наибольшего значения момент двигателя достигает при угле . Эта величина характеризует собой перегрузочную способность СД.
Увеличение угла  более значения
более значения  может привести к неустойчивой работе двигателя и выпадению его из синхронизма. При меньших значениях
может привести к неустойчивой работе двигателя и выпадению его из синхронизма. При меньших значениях  его работа устойчива.
его работа устойчива.
Номинальный угол сдвига фаз  характеризует возможный длительный режим работы двигателя по условиям нагревания, следовательно, и его номинального момента Мн. Перегрузочная характеристика СД определяется как
характеризует возможный длительный режим работы двигателя по условиям нагревания, следовательно, и его номинального момента Мн. Перегрузочная характеристика СД определяется как  .
.
Для механизмов с переменной нагрузкой, особенно при вероятности возникновения ее пиков, применяются двигатели с высокой перегрузочной способностью. В некоторых случаях осуществляется автоматическое увеличение ЭДС двигателя за счет кратковременного его перевозбуждения, что приводит к повышению  и соответственно
и соответственно  до 4.
до 4.
Следует также отметить, что СД менее чувствителен к снижению напряжения питающей сети, чем АД, так как момент СД пропорционален первой степени напряжения.
В явнополюсных СД реактивные сопротивления по продольной и поперечным осям не равны. Поэтому зависимость момента от угла внутреннего сдвига фаз имеет вид (для характеристики 2 рис. 9.2) [1]:

, (9.3)
где  и
и  – реактивные сопротивления по продольной и поперечной осям.
– реактивные сопротивления по продольной и поперечной осям.
Второй член в приведенном выражении представляет собой значение реактивного момента. Из анализа формулы (9.3) следует, что явнополюсный СД может развивать некоторый момент и без возбуждения.
Следует отметить, что с погрешностью 10–20 % для крупных явнополюсных двигателей можно пренебречь составляющей реактивного момента и пользоваться выражением (9.2).
Механические характеристики СД в двигательном режиме
Синхронные ЭД в настоящее время получили широкое применение в приводах большой мощности (от 5000 кВт до 20 МВт). При этом особенностью таких приводов является продолжительный режим работы с незначительными и редкими изменениями нагрузки на валу.
В качестве примера использования СД в нефтяной отрасли можно привести электроприводы магистральных центробежных насосов.
Необходимо отметить следующие положительные качества СД:
1) Постоянство скорости вращения двигателя независимо от нагрузки на валу в пределах перегрузочной способности;
2) Возможность регулирования потребления реактивной мощности;
3) Самая высокая среди всех типов двигателей надежность, это обеспечивается большим зазором между статором и ротором.
Недостатки СД:
1) Сложность запуска;
2) Склонность СД к качаниям;
3) Сложность конструкции и дороговизна.
Механическая характеристика СД, выражающая зависимость угловой скорости ротора от среднего значения момента на валу двигателя, имеет вид (рис. 4.1).
Рисунок 4.1 – Механическая характеристика СД
В пределах изменения момента от –Мк до Мк (Мк – критический момент, определяет перегрузочную способность двигателя), угловая скорость вращения вала двигателя не меняется и равна синхронной скорости (т. е. скорости ВМП)
Вращающий момент СД создается за счет взаимодействия вращающего магнитного поля, создаваемой симметричной статорной обмоткой, с постоянным магнитным полем, создаваемой обмоткой возбуждения, которая находится на роторе и питается от источника постоянного напряжения.
Рисунок 4.2 – Схема СД
Следует отметить, что обмотка возбуждения имеет значительно большое число витков, чем фаза статорной обмотки и выполнена из проводника значительно меньшего сечения.
Если момент на валу двигателя превышает критический момент, то угловая скорость начинает резко уменьшаться – «двигатель выходит из синхронизма».
Как уже говорилось, отличием СМ от АМ является то, что ротор вращается синхронно с магнитным полем (с одинаковой скоростью ω0). При этом если мерой нагрузки у АД являлось скольжение
то у СД при увеличении нагрузки на валу двигателя, увеличивается угол смещения оси ротора по отношению к оси вращения магнитного поля. Это явление называется «растяжением упругой электромагнитной связи» и характеризуется углом рассогласования Θ. При этом в двигательном режиме ось вращающего магнитного поля опережает ось ротора («поле тянет за собой ротор»).
На векторной диаграмме СМ угол рассогласования Θ равен углу сдвига фаз между вектором напряжения U, приложенного к статору, и ЭДС от магнитного потока возбуждения ЕВ, наведенной в статоре
Поставим задачу проанализировать, как будет вести себя СД при изменении нагрузки на его валу:
1) Устойчиво ли он будет работать;
2) Как будет изменяться мгновенное значение угловой скорости, если момент будет носить пульсирующий характер;
3) Как будет изменяться направление момента при изменении угла рассогласования и т. д.
С этой целью необходимо построить, так называемую, угловую характеристику СД, которая представляет собой зависимость М=f(Θ). Для вывода уравнения угловой характеристики воспользуемся электрической схемой замещения СД и векторной диаграммой.
Электрическая схема замещения СД. Уравнение электрического состояния. Угловая характеристика СД
Электрическая схема замещения СД моделирует электромагнитные процессы, происходящие в одной фазе статорной обмотки. В простейшем виде она имеет вид на рис. 4.3.
Рисунок 4.3 – Электрическая схема замещения СД. U – действующее значение напряжения, приложенного к фазе статорной обмотки; I – действующее значение тока, протекающего по фазе обмотки статора; ХЯ – индуктивное сопротивление фазы обмотки статора; ЕВ – ЭДС, которое наводится в фазе статорной обмотки магнитным потоком, создаваемым обмоткой возбуждения (ЭДС взаимоиндукции, ); ЕЯ – ЭДС самоиндукции, наведенная в фазе статорной обмотки при изменении тока по синусоидальному закону,.
Если в соответствии со вторым законом Кирхгофа с учетом направления величин запишем уравнение
Это уравнение носит название уравнение электрического состояния СД
Построим векторную диаграмму, соответствующую этому уравнению.
Рисунок 4.4 – Векторная диаграмма
Электрическая мощность (активная), потребляемая двигателем из сети, может быть записана следующим образом
Если пренебречь потерями в двигателе, то
а это значит, что
Для получения зависимости М=f(Θ) воспользуемся геометрическим приемом, а именно, из конца вектора ЕВ на векторной диаграмме (рис. 4.4) восстановим перпендикуляр на вектор напряжения U. Величина этого отрезка «ab» равна
Подставим в выражение (4.1) последнее равенство
Полученное уравнение выражает зависимость электромагнитного момента и называется уравнением угловой характеристики СД, где критический момент
Графическая зависимость, соответствующая уравнению угловой характеристики СД, представлена на рис. 4.5.
Рисунок 4.5 – Угловая характеристика СД
Проанализировав угловую характеристику в двигательном режиме, нетрудно убедиться, что в области угла рассогласования увеличивается нагрузка на валу двигателя, т. е. увеличение угла рассогласования влечет возрастание электромагнитного момента, а это значит, что эта часть угловой характеристики описывает область устойчивой работы СД (рабочая часть). Также направление электромагнитного момента при изменении угла рассогласования изменяется с удвоенной частотой, т. е. f=100 Гц. Следовательно, СД обладает знакопеременным моментом, в этом проявляется негативное свойство СД, которое носит название склонность к качаниям (или колебания ротора).
Поэтому СД конструируют так, что номинальному режиму по паспорту двигателя соответствует угол рассогласования Θ=20÷30º. Тогда перегрузочная способность двигателя
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями: