6. Рекуперация – это накопление энергии упругой деформации связок и сухожилий, которая характеризуется их растяжением.
Количество накапливаемой энергии зависит от многих параметров и в первую очередь от работы мышц, связок и сухожилий.
Рекуперация энергии в движениях человека осуществляется двумя способами.
Во-первых, кинетическая энергия движения может переходить в потенциальную энергию гравитации (сил тяжести), Например, в обычной ходьбе наивысшему положению ЦМ тела (максимуму потенциальной энергии) соответствует минимум кинетической энергии, и наоборот, кинетическая энергия тела самая большая, когда его ОЦМ находится в самом низком положении. Образно можно себе представить, что ОЦМ движется как шарик, катящийся по неровной поверхности: на подъемах кинетическая энергия переходит в потенциальную, а на спусках – наоборот. Благодаря этому полная механическая энергия тела (т. е. сумма его кинетической и потенциальной энергии) сохраняется. Разумеется, это сохранение не стопроцентное — значительная часть энергии рассеивается. Но все, же благодаря описанному явлению экономичность ходьбы значительно повышается.
Во-вторых, кинетическая энергия движения превращается в потенциальную энергию упругой деформации мышц, а накопленная потенциальная энергия частично снова превращается в работу – идет на сообщение скорости телу и его подъём. В модельных опытах (прыжки на месте) показано, что рациональное использование упругих сил мышц может повысить экономичность работы более чем в 2 раза.
7. Выносливость — это способность человека преодолевать утомление и эффективно действовать при этом.
Если человек длительное время выполняет какое-то двигательное задание, то его движения можно классифицировать:
— по интенсивности (скорость, сила и т.д.);
— по объему (метры, работа и т.д.);
— по времени выполнения (секунда).
Выделяют 3 способа определение выносливости:
1. задается время выполнения работы
измеряется объем работы (расстояние)
определяется скорость выполнения
2. объем работы постоянен
измеряется время выполнения
определяется скорость выполнения движения
3. скорость выполнения постоянная
измеряется время выполнения
определяется объем работы
Для оценки выносливости используют термин утомление, что означает временное снижение работоспособности. Различают умственное, эмоциональное и физическое утомление. Биомеханика рассматривает только физическое утомление.
При мышечной работе утомление проходит через 2 фазы:
1. Фаза компенсированного утомление — когда спортсмен сохраняет интенсивность движения на прежнем уровне (например, скорость бега).
2. Фаза декомпенсированного утомления — когда, несмотря на все старания, спортсмен не может сохранить необходимую интенсивность (например, турист, отставший от группы)
8. Проблема экономизации спорт техники: Если у разных спортсменов при выполнении одного и того же двигательного задания измерить энергозапрос, то его величины могут оказаться резко различными: одна и та же работа будет для разных спортсменов связана с неодинаковым расходом энергии.
Экономичность работы нередко оценивают с помощью коэффициентов, связывающих величины выполненной работы, с величинами затраченной при этом энергии.
Использование указанных коэффициентов, во-первых, позволяет анализировать лишь внешние результаты двигательных заданий (но не процессы, лежащие в их основе); во- вторых, приемлемо лишь при анализе двигательных заданий сходного типа. Можно, например, сравнивать величины этих коэффициентов в одном и том же движении (например, в беге), и нельзя – в движениях далеких друг от друга (например, в плавании и прыжках в воду).
В циклических локомоциях для характеристики экономичности техники обычно используют не указанные выше коэффициенты, а так называемую константу пути – величину энергозатрат, приходящуюся на 1 метр пути.
При сравнении разных локомоций значения константы пути и коэффициентов экономичности работы могут не совпадать, поскольку в разных локомоциях для того, чтобы преодолеть одно и то же расстояние, надо выполнить разную механическую работу.
Экономичность техники зависит от двух групп факторов: 1) физиологических и биохимических (в частности от того, аэробными или анаэробными процессами обеспечивается поставка энергии) и 2) биомеханических.
Коэффициенты: 1. Валовый коэффициент (брутто-коэффициент) экономичности работы:
K1=A/E где А — выполненная механическая работа (в джоулях), Е— затраченная энергия (в джоулях).
2. Нетто-коэффициент; в данном случае из величины энергозатрат при выполнении работы вычитают величину энерготрат в состоянии покоя (в условиях основного обмена или в рабочей позе):
K2=A/(E-En) где А — величины работы (в джоулях), En —энерготраты (в джоулях).
3 Дельта коэффициент сравнивают величины выполненной работы в двух двигательных заданиях разной интенсивности
K3=(A2-A1)/(E2-E2) где A 1 и А 2 величины работы в джоулях, Е1 и Е2 энерготраты в джоулях.
Особенности спортивной техники в упражнениях, требующих большой выносливости:
1.устранением ненужных движений, 2.устранением ненужных сокращений мышц. (У квалифицированных спортсменов суммарное время активности мышц меньше, время расслабленного состояния больше, чем у новичков. Это достигается за счет так называемой концентрации активности мышц.), 3.уменьшением внешнего сопротивления (уменьшением сопротивления воды в плавании за счет выбора более обтекаемого положения тела); 4.уменьшением внутрицикловых колебаний скорости. (Повышение скорости (после ее падения) требует затрат энергии. По возможности такие колебания надо уменьшать); 5.выбором оптимального соотношения между силой действия и скоростью рабочих движений, 6.выбором оптимального соотношения между длиной и частотой шагов.
10. Различают простые и сложные двигательные реакции. Простая реакция — это ответ заранее известным движением на заранее известный (внезапно появляющийся) сигнал. Примером может быть скоростная стрельба из пистолета по силуэтам, старт в беге и т. п. Все остальные типы реакций — когда заранее не
известно, что именно надо делать в ответ на сигнал и каким будет этот сигнал, — называются сложными. В двигательных реакциях различают:
а) сенсорную фазу — от момента появления сигнала до первых признаков мышечной активности (обычно они регистрируются по ЭМГ, т. е. по появлению электрической активности в соответствующих мышечных группах);
б)премоторную фазу (электромеханический интервал — ЭМИ) — от появления электрической активности мышц до начала движения. Этот компонент наиболее стабилен и составляет 25—60 мс;
в) моторную фазу — от начала движения до его завершения (например, до удара по мячу).
11. Эргометрией называется совокупность количественных методов измерения физической работоспособности человека. Развитие эргометрии связано с необходимостью охарактеризовать различные режимы выполнения двигательных заданий на количественном уровне. Для этого выбраны три основные переменные.
1. Интенсивность выполняемого двигательного задания. Этим обозначается одна из двух механических величин: а) скорость передвижения спортсмена (например, в беге – единица измерения м/с); б) мощность (например, при педалировании на велоэргометре — единица измерения – Вт).
2. Объём выполненного двигательного задания. Этим обозначается одна из двух механических величин: а) пройденное расстояние (например, в циклических упражнениях (беге, беге на лыжах, коньках, плавании и т. п.) – единица измерения – м); б) выполненная работа (в физическом смысле, например, при вращении педалей велоэргометра, подъёме штанги – единица измерения – Дж).
3. Время выполнения (единица измерения – с).
Показатели интенсивности, объёма и времени выполнения называются эргометрическими показателями. Один из них всегда задаётся как параметр двигательного задания, два других измеряются.
Например, первый тест – задаётся параметр – дистанция 3000м. Измеряется время пробегания дистанции (например, 12 мин); из этих показателей высчитывается скорость: V = S / t; V = 3000 м / 720 с = 4,16 м/с.
Второй тест – задаётся параметр – бег 12 мин. Измеряется пройденная дистанция (например 3000м). Высчитывается средняя скорость: V = S / t; V = 3000 / 720 = 4, 16 м/с.
Третий тест – задаётся средняя скорость – бег со скоростью 4,16 м/с. Измеряется время выполнении задания до снижения скорости (например – 12 мин). Высчитывается расстояние: S = V · t; S = 4,16 · 720 с = 3000м. То есть, если испытуемый сможет поддерживать среднюю скорость во время бега (например на тредбане) в течении 12 мин, то он преодолел бы расстояние 3000м.
На этих примера доказано, что если величины времени, интенсивности и объёма двигательных заданий соответствуют друг другу, то при разных вариантах заданий получаются совпадающие результаты. Поэтому результаты, полученные в заданиях одного типа можно переносить на задания другого типа, если только задаваемые и регистрируемые показатели совпадают. Это так называемое правило обратимости двигательных заданий.
Процессы с рекуперацией механической и тепловой энергии
Простейшим примером процесса с рекуперацией тепловой энергии является выпаривание с тепловым насосом. Этот способ выпаривания является альтернативным использованию многокорпусных выпарных установок, реализующих экономию греющего пара. В данном случае в качестве греющего используется вторичный пар, для повышения потенциала которого (давления и соответственно температуры конденсации) его сжимают в компрессоре. При этом его температура конденсации становится на 10-15 градусов выше температуры кипения раствора.
Схема такого выпарного аппарата с полным тепловым насосом (сжимается весь вторичный пар) представлена на рис. 2.
Сжатие вторичного пара целесообразно проводить в турбокомпрессорах, так как поршневые компрессоры загрязняют пар смазкой, что резко повышает термическое сопротивление в процессе конденсации.
Рис.2. Схема выпарного аппарата с полным тепловым насосом:
1- выпарной аппарат; 2 — турбокомпрессор
При конденсации 1 кг греющего пара получается 0,8 — 0,9 кг вторичного, поэтому для стационарности выпаривания к сжатому вторичному пару Wдобавляют свежий пар в количестве D0. Необходимый расход пара:
Мощность, затрачиваемую на сжатие вторичного пара, определяют по формуле:
где (H * — hвт) – работа сжатия вторичного пара от давления Рвт до Ргр;
H * — энтальпия сжатого пара, находящегося после сжатия в перегретом состоянии; поэтому H * > Hгр;
hсж— КПД политропного сжатия;
hмех — механический КПД компрессора.
При работе такой выпарной установки вследствие рецикла (обратного потока) вторичного пара происходит рекуперация тепловой энергии. Естественно, что работа по схеме с тепловым насосом энергетически выгоднее, чем без него. Но область ее применения ограничена специфическими характеристиками работы турбокомпрессоров (высокие производительности при сравнительно небольших степенях сжатия). В результате обобщения опыта эксплуатации различных выпарных установок найдено, что выпаривание с тепловым насосом экономически оправдано, когда Ргр / Рвт > 2,5 — 3 и W > 1,5 м 3 /с [6].
Типичным сопряженным процессом, рекуперирующим механическую энергию, является абсорбционно-десорбционный процесс.
Упрощенная схема процесса приведена на рис.3
Рис.3. Принципиальная схема абсорбционно-десорбционного агрегата:
1 — абсорбер, 2 — десорбер, 3 — электродвигатель, 4 — насос, 5 — турбина;
I — исходный очищаемый газ, II — очищенный газ, III — абсорбент, IV — отработанный абсорбент, V — десорбированный компонент
Исходный газ I, содержащий поглощаемый компонент, подается в абсорбер 1, работающий под достаточно высоким давлением. Туда же многоступенчатым центробежным насосом 4 направляется абсорбент III. Из абсорбера выходят очищенный газ II и абсорбент IV, насыщенный поглощенным компонентом. Абсорбент, находящийся после абсорбера под высоким давлением, поступает на турбину 5, где его давление сбрасывается до атмосферного. Из турбины поток IV направляется в десорбер 2, где происходит выделение поглощенного компонента из его смеси с абсорбентом и их разделение. Поток компонента V выводится к потребителю, а регенерированный абсорбент III возвращается насосом в абсорбер.
Рассмотренный процесс является примером сопряжения насоса и турбины: последняя возвращает заметную долю механической энергии, затрачиваемой насосом на подачу поглотителя в абсорбер. Описанный процесс используется в промышленности для выделения СО2 из азотоводородной смеси. При этом давление в абсорбере составляет 1,6 — 3,0 МПа, а в десорбере – атмосферное. В комбинации «электродвигатель – насос — турбина» удается рекуперировать до 40 % энергии, необходимой для работы насоса. Отметим, что такое же сопряжение насоса и турбины применяется и на крупных обратноосмотических установках, служащих, например, для опреснения морской воды. Сбрасываемый поток концентрата находится под давлением 4,5-5,0 МПа, и эта энергия рекуперируется также с помощью турбины.
Способ десорбции понижением давления над абсорбентом является простым и особенно выгоден в тех случаях, когда абсорбцию проводят при повышенных давлениях.

studopedia.org — Студопедия.Орг — 2014-2024 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.008 с) .
7.10. Примеры реализации цикловых роботов с рекуперацией энергии
Примеры реализации цикловых роботов е рекуперацией энергии позволили проверить основные положения разработанных инженерных методик синтеза и расчета привода, рекуператоров энергии и исполнительных механизмов.
Первый экспериментальный макет системы с тремя степенями подвижности (А. с. 1006208 СССР, МКИ в 25J9/00) обеспечивал позиционирование захватного устройства в 2 3 =8 точках рабочей плоскости (рис. 7.11). Это частный случай системы, показанной на рис. 7.10, а, при JV = 3 с кинематическими передачами от звеньев к рекуператорам энергии. Обобщенные координаты ψ1, ψ2, ψ3 соответствуют установке рекуператоров на основании. Подвижные звенья снабжены дополнительными уравновешивающими массами.
Манипулятор, установленный на основании /, имеет последовательно шарнирно соединенные звенья 2, 3, 5, захватное устройство 6, укрепленное на звене 5. Звено 2 с помощью шарнира (вращательной пары) связано с основанием 1. Маховики 10—12 на валах приводов звеньев 2, 3, 5 манипулятора соответственно установлены также на основании / и являются входными элементами соответствующих приводных кинематических цепей. При этом маховик 10 зубчатой передачей связан со звеном 2, маховик 11 зубчатой передачей и тросовой передачей 9 — со звеном 3, а маховик 12 зубчатой передачей и двумя тросовыми передачами 7 — со звеном 5. На звене 3 предусмотрена уравновешивающая масса 8, а на звене 5 — уравновешивающая масса 4.
На основании 1 смонтированы регулируемые фиксаторы, ограничивающие движения маховиков 10—12.
Р

Рисунок 10 7.11 — Экспериментальный макет промышленного робота

екуператоры для всех степеней подвижности выполненыодинаковыми по схеме, показанной на рис. 7.12,а. Звено 1 манипулятора связано с двигателем 9 системой зубчатых колес 10, 11, 8, 12, причем зубчатые колеса 8 и 11 установлены соосно и имеют возможность относительного перемещения в пределах регулируемого зазора. Кроме того, колесо 11 несет два кулачка 7, взаимодействующие с толкателем 6 фиксатора. Рекуператор содержит два упругих элемента — пружины 5 жесткости с, взаимодействующих с рычагом 3, жестко связанным с колесом 8. На рычаге 3 смонтированы два зуба 4, служащие для фиксации этого рычага в крайних положениях. Пружины 5 установлены с предварительным натягом, а зоны работы каждой из них разделены упором 2.
Рекуператоры имеют две особенности.
Рисунок 11 7.12 — Схема рекуператора
о-первых, вследствие полной динамической развязки за счет соответствующего выбора инерционных параметров звеньев руки стало возможным синтезировать упругую характеристику рекуператора по критерию максимального быстродействия при ограничении динамических нагрузок. В данном случае она выбрана кусочно-линейной (рис. 7.12, б):
М = —сψ – Psgnψ, (7.18)
где М — момент, действующий на рычаг 3, от упругих элементов 5; т)з — угол отклонения рычага 3 от нейтрального положения; Р — предварительный натяг. Из формулы (7.18) следует, что чем меньше с, тем ближе развиваемый упругими элементами момент М (определяющий динамические нагрузки в системе) к кусочно-постоянному ±Р. Это приводит к более форсированному режиму движения: ускорение и замедление держатся постоянными и максимально допустимыми на соответствующих интервалах движения (см. рис. 7.1, д, в рассматриваемом случае вместо синусоиды будут получаться отрезки парабол).
Во-вторых, управление фиксаторами и подкачка энергии в систему осуществляется от одного двигателя 9. Для этого, как отмечалось, колеса 8 я 11 установлены с возможностью относительного перемещения в пределах зазора. При включении двигателя 9 и перемещении колеса // в пределах зазора связанный с ним кулачок 7 отводит толкатель 6 с фиксатором. Система освобождается и начинает движение под действием пружины 5, а двигатель, выбрав зазор между колесами 8 и 11, сообщает системе энергию, необходимую для компенсации потерь на трение.
Первые эксперименты на макете подтвердили преимущества системы с рекуператорами перед системами, построенными по
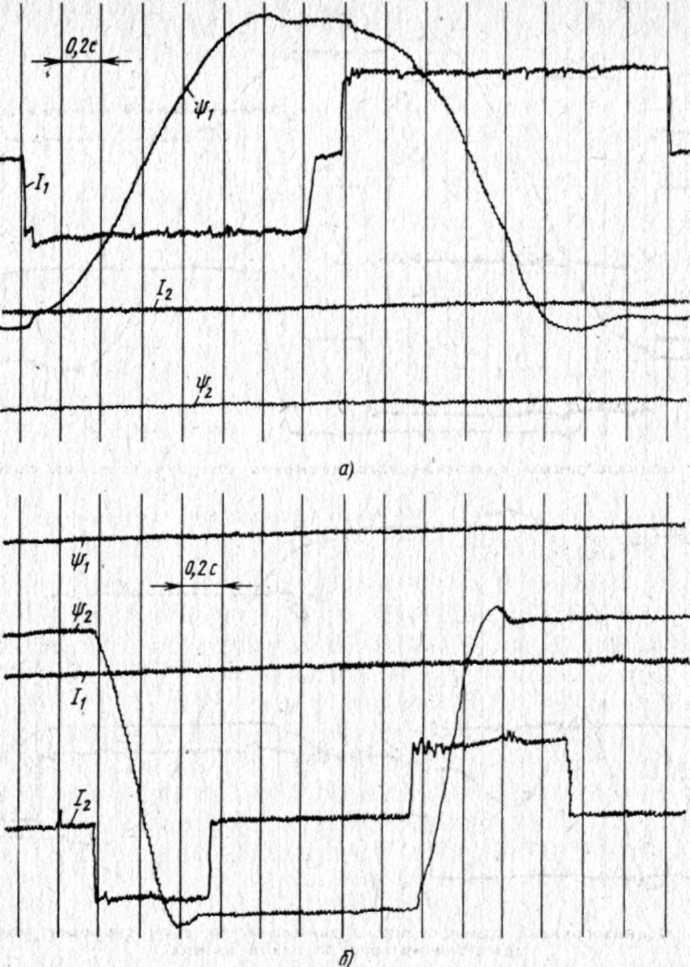
Рисунок 12 7.13 — Осциллограммы раздельных движений по первой и второй степеням подвижности
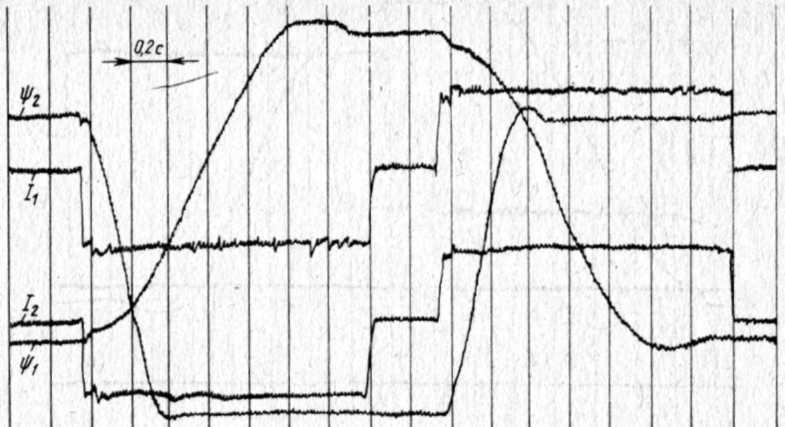
Рисунок 13 7.14 — Осциллограммы одновременного движения по двум степеням подвижности
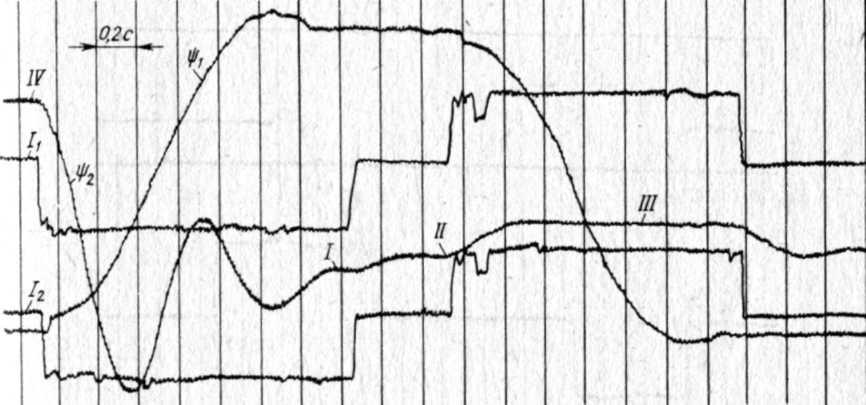
Рисунок 14 7.15 — Осциллограммы одновременного движения по двум степеням подвижности при наличия сбоя по одной из них


традиционной схеме, как по критерию быстродействия, так и по потребляемой мощности. При одинаковых характеристиках рекуператоров и мощности двигателей 6 Вт для манипулятора общей массой 2,5 кг получены средние угловые скорости: по первой степени подвижности 6 рад/с, по второй 11 рад/с, по третьей 20 рад/с. Эти значения не являются предельными.
Таким образом, по сравнению с традиционными конструкциями цикловых роботов рассмотренные технические решения позволяют ориентировочно повысить быстродействие в 3 . 4 раза при одновременном уменьшении мощности приводов на один порядок.
Серия осциллограмм, полученных на макете, приведена на рис. 7.13—7.16. Здесь представлены законы изменений динамически независимых координат ψ1 (t) и ψ2 (t), т. е. выходов рекуператоров первого и второго звеньев руки, и соответственно токи /j и /2 в обмотках двигателей этих звеньев; закон изменения координаты ψ3 (t) показан на рис. 7.16.
Осциллограммы на рис. ‘7.13, а соответствуют работе только первой степени подвижности. На рисунке видно, что при включении двигателя (кривая It) движение начинается с запаздыванием 0,03 с. При этом сначала выбирается зазор в системе механических передач от выходного элемента аккумулятора до звена (ступенька на кривой l]^), затем осуществляется плавное перемещение, включающее зависящее от настройки системы перерегулирование, и фиксация на упоре. Реверсирование момента двигателя приводит к обратному движению системы с фиксацией в исходной точке. При этом все особенности кривой на прямом ходе повторяются и на обратном ходе.
Аналогичные осциллограммы для второй степени подвижности приведены на рис. 7.13, б. Движения здесь осуществляются за существенно меньшее время.
О дновременное движение по двум степеням подвижности иллюстрируют осциллограммы на рис. 7.14. Здесь характер движений по каждой степени подвижности не изменился, что говорит о малых динамических взаимовлияниях в системе. Этот факт подтверждается осциллограммой на рис. 7.15, где движение по первой степени подвижности происходило от одного фиксатора до другого, а по второй — совершались затухающие колебания, обусловленные искусственным выключением из работы одного из упоров-фиксаторов. При этом соответствующий рекуператор в процессе колебаний полностью разрядился. Отметим, что осциллограммы на рис. 7.13—7.16 свидетельствуют, что токи двигателей в процессе движений практически не м
дновременное движение по двум степеням подвижности иллюстрируют осциллограммы на рис. 7.14. Здесь характер движений по каждой степени подвижности не изменился, что говорит о малых динамических взаимовлияниях в системе. Этот факт подтверждается осциллограммой на рис. 7.15, где движение по первой степени подвижности происходило от одного фиксатора до другого, а по второй — совершались затухающие колебания, обусловленные искусственным выключением из работы одного из упоров-фиксаторов. При этом соответствующий рекуператор в процессе колебаний полностью разрядился. Отметим, что осциллограммы на рис. 7.13—7.16 свидетельствуют, что токи двигателей в процессе движений практически не м еняются. Это обусловлено малыми частотами вращения двигателей по отношению к номинальным — токи двигателей равны пусковым.
еняются. Это обусловлено малыми частотами вращения двигателей по отношению к номинальным — токи двигателей равны пусковым.
Уровни участков I—III выстоя кривой ψ2 на рис. 7.15, соответствующие включению двигателя в положительном направлении, выключению двигателя и включению его в отрицательном направлении при разряженном рекуператоре, иллюстрируют, что момент двигателя незначителен по сравнению с моментом, развиваемым рекуператором. Мом
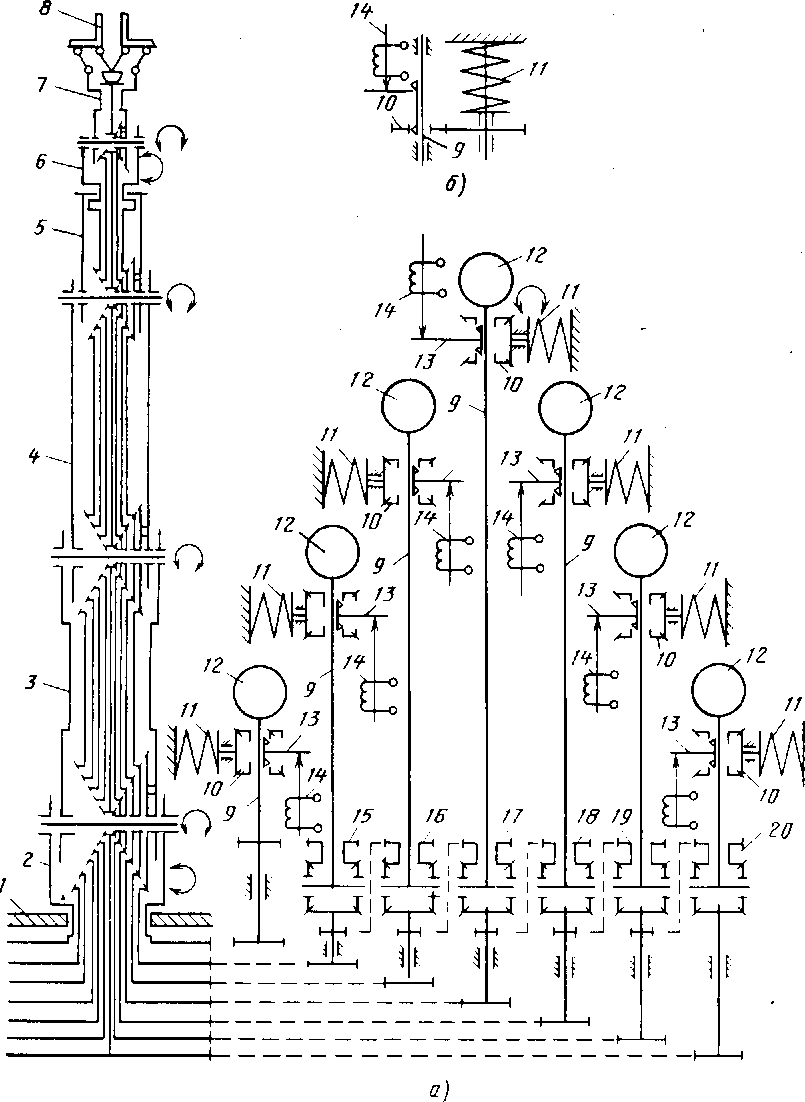
Рисунок 16 7.17 — Опытно-промышленный образец быстродействующего робота с рекуперацией энергии: а — общий вид; б — кинематическая схема
ента двигателя достаточно лишь для того, чтобы сместить систему с участкаIIна участок III или на участок I, в то время как момент, развиваемый рекуператором, соответствует перепаду кривой между участками II и IV.
Одновременные движения всех трех степеней свободы макета иллюстрирует осциллограмма на рис. 7.16. Хорошо видны существенные различия между скоростями трех движений, которые обусловлены разницей в массах звеньев, так как упругие характеристики рекуператоров одинаковы.
Эксперименты показали, что система мало чувствительна к точности уравновешивания второго и третьего звеньев. При погрешности балансировки до 10 % наблюдалась устойчивая работа системы при одновременном срабатывании рекуператоров.
Полученные теоретические и экспериментальные результаты позволили приступить к созданию робота с цикловым управлением для обслуживания быстродействующих прессов. В настоящее время прессы могут работать со скоростью 60 . 80 ударов в минуту, а скорость обслуживающих их роботов, как правило, не превышает 10 циклов в минуту. Недостаточное быстродействие роботов ограничивает производительность штамповочных робототехнических комплексов. Опытно-промышленный образец робота с рекуператором энергии (рис. 7.17), созданный совместно ИМАШ АН СССР им. А. А. Благонравова и НПО «Техноприбор» (г. Смоленск), имеет быстродействие до 25 циклов в минуту.
Предлагаемая схема позволяет с помощью дополнительного звена упростить ввод захватного устройства робота в рабочую зону оборудования, что обеспечивает расширение функциональных возможностей, а также позволяет облегчить подвижные звенья манипулятора, уменьшить их размеры и массу, а следовательно, улучшить динамические качества робота и в первую очередь его быстродействие.
Промышленный робот (см. рис. 7.17, б) состоит: из неподвижного основания 1, на котором установлен манипулятор, образованный подъемно-поворотным рычагом 5, соединенным с основанием 1 поступательной 15 и вращательной 2 кинематическими парами, оси которых параллельны; индивидуальных приводов поступательного и вращательного движений захватного устройства, включающих двигатели 3, 21 и аккумуляторы механической энергии в виде пружин 5, 13, 18, 20; программно-управляемых упоров-фиксаторов 4, 7, 17, 19 крайних положений и кинематических цепей 16 для обеспечения перемещений подъемно-поворотного рычага 8 и захватного устройства 9. Робот также снабжен дополнительным звеном 10, соединенным вращательной кинематической парой 11 с подъемно-поворотным рычагом 8, и кинематической передачей 12, связывающей звено 10 с основанием 1. При этом приводы манипулятора установлены на основании, а механизм развязки вращательного и поступательного перемещений выполнен в виде соосной передачи винт—гайка, ось которой совпадает с осью вращения подъемно-поворотного рычага 8. Один из элементов — винт 14 — связан с приводом поступательного движения захватного устройства, а другой элемент — гайка 6 — жестко соединен с подъемно-поворотным рычагом 8 и кинематически связан с приводом вращательного движения захватного устройства.
Кинематическая передача 12, связывающая звено 10 с основанием 1, может быть выполнена на гибких элементах, например тросах или цепях, а ее передаточное отношение i и отношение £ длины звена 10 к длине подъемно-поворотного рычага 8 должны удовлетворять условию i = 1 + π/[π — 2 arcsin (1 — £)], если захватное устройство необходимо перемещать по траектории,

Рисунок 17 7.18 — Примеры компоновки промышленного робота на прессе
близкой к прямой, при заданном расстоянии L от этой прямой до оси поворота подъемно-поворотного рычага 8.
Компоновка робота 1 на прессе 3 с возможностью прохода между колонками штампа 2 показана на рис. 7.18, а. При £ = в= 0,293 и i — 3 поворот подъемно-поворотного рычага 8 на угол я/2 вызывает поворот звена 10 (см. рис. 7.17) относительно вертикальной оси на угол я, причем центр захватного устройства будет двигаться приближенно по прямой I—I с ходом s = 21 и L = 0,707/ (см, рис. 7.18, а). При i = 1 звено 10 (см. рис. 7.18, б) сохраняет свою ориентацию в пространстве. В этом случае траекторией поступательного движения звена 10 будет окружность.
При компоновке, показанной на рис. 7.18, а, манипулятор за счет звена 10 и кинематической связи 12 этого звена с основанием 1 (см. рис. 7.17) обеспечивает почти прямолинейное движение захватного устройства 9, а не движение по окружности. Таким образом, всегда можно расположить робот на боковой стороне станины пресса так, чтобы траектория захватного устройства проходила между направляющими боковыми колонками штампа. Поворот манипулятора осуществляется за счет привода, включающего двигатель 21 и пружинные аккумуляторы 18, 20. Благодаря тому, что привод подъема манипулятора вынесен на основание, перемещаемая масса манипулятора уменьшается и, следовательно, собственная частота и быстродействие увеличиваются. При повороте рычага в передаче винт—гайка имеет место некоторое поступательное перемещение манипулятора в вертикальном направлении. Однако передаточное отношение винт—гайка может быть выбрано достаточно большим, в результате чего достигается приближенная кинематическая развязка этих двух степеней подвижности.
Таким образом, при использовании предлагаемой схемы путем ввода дополнительного звена и кинематической передачи, связывающей звено с основанием, существенно упрощается ввод захватного устройства в рабочую зону оборудования. Это обеспечивает расширение функциональных возможностей робота, а также облегчает подвижность звеньев манипулятора, уменьшает их размеры и массу за счет вынесения всех приводов на основание, улучшая динамические качества робота.
Робот описанной конструкции имеет грузоподъемность 0,2 кг. Этот робот, устанавливаемый на боковой поверхности станины пресса, не занимает зоны оператора-наладчика с лицевой стороны пресса и обслуживает его, пронося предметы производства между колонками штампа.
Очевидные положительные качества промышленных роботов с цикловым управлением и рекуперацией механической энергии стимулируют попытки оснастить более сложные промышленные роботы, а именно позиционные, рекуператорами энергии (А. с. 733975 СССР, МКИ В 25 J 9/00). Управление движениями позиционных роботов осуществляется с помощью датчиков обратных связей (датчиков относительного положения звеньев манипулятора), включенных в контур регулирования. Поэтому роботы с позиционным управлением реализуют программы с гораздо более сложным циклом; чем роботы с цикловым управлением, работающие по механическим упорам. Программирование позиционных систем осуществляется обучением: в процессе ручного управления в память заносятся координаты позиций и порядок их обхода.
Проблему оснащения позиционных роботов рекуператорами энергии осложняет именно невозможность использования стационарных программно-управляемых упоров-фиксаторов. Вместо них можно использовать различные тормозные, а также программно-управляемые устройства, однако при этом необходимо решать задачу точности отработки программных значений обобщенных координат. Другая сложность связана с необходимостью соединения рекуператоров с кинематическими цепями приводов звеньев манипулятора управляемыми механизмами с очень малым временем срабатывания. Наконец, существенное значение имеют вопросы подзарядки рекуператоров.
Одним из вариантов технического решения проблемы является конструкция промышленного робота с позиционным управлением, кинематическая схема которого изображена на рис. 7.19, а.
Робот состоит из последовательно установленных на основании 1 и шарнирно соединенных между собой звеньев 2—8. Звено 2 посредством шарнира крепится на основании Там же установлены компенсирующий механизм, образованный рядом дифференциалов 15—20, и двигатели 12, связанные со звеньями манипулятора кинематическими цепями, выполненными, например, на конических передачах. Кроме того, на основании / установлены рекуператоры механической энергии 11, выполненные, например, в виде пружин кручения, выходные звенья рекуператоров 10. Механизмы реверса 13 установлены между выходными звеньями рекуператоров и кинематическими цепями приводов, в данном случае валами 9 двигателей 12. Программно-управляемые муфты 14 также установлены между выходными звеньями рекуператоров и кинематическими цепями приводов. Рекуператорами механической энергии могут быть оснащены приводы не всех звеньев,а только наиболее нагруженных, т. е. наиболее инерционных.
Позиционный промышленный робот с рекуператорами энергии работает следующим образом.
В исходном положении (перед началом работы) рекуператоры «заряжены», т. е. пружины сжаты, их состояния зафиксированы, например, с помощью специальных тормозных устройств (на схемах не показаны). При поступлении команды на отработку задаваемых перемещений включаются в требуемом направлении двигатели 12 и к валам 9 подключаются выходные звенья рекуператоров 10 с помощью программно-управляемых муфт’ 14 так, что направление моментов от рекуператоров 11 совпадает с направлением вращения валов Рис моментами двигателей 12. При этом происходит интенсивный разгон системы, переход потенциальной энергии пружин рекуператоров в кинетическую энергию звеньев. При отработке некоторой части требуемых перемещений программно-управляемые муфты по сигналам от системы управления переключают направление моментов от аккумуляторов с помощью механизма реверса на обратное. При этом в течение второй части такта движения направления моментов от рекуператоров не совпадают с направлениями скоростей валов Рис направлениями моментов двигателей 12. Происходит торможение системы, сопровождаемое зарядкой рекуператоров 11 и обратным переходом кинетической энергии системы в потенциальную энергию пружин. Энергия двигателей 12 расходуется на преодоление сил трения и подзарядку рекуператоров. В конце каждого такта состояние пружинных рекуператоров опять фиксируется тормозными устройствами.
В альтернативном вариант
Рисунок 18 7.19 Кинематическая сема робота с позиционным управлением
е подключения выходных звеньев рекуператоров к кинематическим цепям привода механизм реверса отсутствует (рис. 7.19, б). В этом случае для реверсирования момента аккумулятора используются собственные свойства колебательной системы пружина рекуператора — выходное звено рекуператора. Собственная частота этой системы значительно выше частоты системы рекуператор — звено робота. Поэтому при отключении ведомого звена рекуператора10 от вала 9 двигателя 12 и при последующем его включении через половину периода собственных колебаний системы «пружина — выходное звено рекуператора» пружина рекуператора перейдет из фазы растяжения в фазу сжатия лишь с незначительной потерей потенциала вследствие неточности включения и наличия явления затухания в системе. Эти потери компенсируются энергией, поступающей в систему «рекуператор — звено робота» на интервале движения от двигателя этой системы.
В заключение отметим, что идеи и методы рекуперации энергии для систем робототехники нашли внедрение в первых серийных образцах роботов циклового типа.
В настоящее время ПКТИ кузробот (г. Таганрог) выпущено два таких образца («Краб-рекупер» и «Старт-рекупер»), отличающихся грузоподъемностью и схемами исполнительных механизмов. Кроме того, в НРБ Институтом технической кибернетики и робототехники Болгарской Академии наук созданы роботы «Робко-М51» и «Робко-М52» также на принципах рекуперации. Причем робот «Робко-М52» обеспечивает значительное число точек позиционирования.
Рекуперация механической энергии в системах привода роботов
Режимы разгона и торможения составляют основу цикла любого робота, поэтому целесообразно на этапе торможения аккумулировать механическую энергию в специальных устройствах, а на этапе разгона «выдавать» ее в систему, оставляя за двигателями лишь функции подкачки энергии для компенсации потерь на трение и совершение полезной работы. Эта идея лежит в основе перспективных двигательных систем робототехники, позволяющих одновременно повысить скорости движений рук и сэкономить энергию.
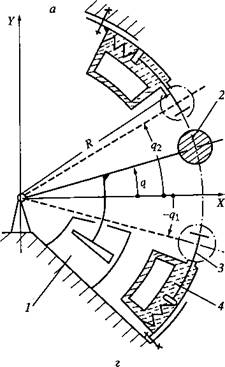
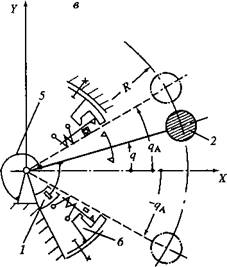
Рис. 2.4. Модели традиционного привода звена (о) и привода с рекуперацией механической энергии (в) и соответствующие им циклограммы (б, г)
Встраивание аккумуляторов механической энергии в двигательную систему робота — одна из наиболее сложных проблем, обусловленная спецификой роботов как систем с большим числом степеней свободы и с изменяемым циклом движений. В общем случае не удается использовать алгоритмы расчета и построения механических аккумулирующих устройств. Однако в конструкциях цикловых роботов эти принципы уже реализованы
Рассмотрим принцип рекуперации энергии и сопоставим традиционную схему привода одной степени подвижности любого циклового робота со схемой, снабженной рекуператором энергии (рис. 2.4). Традиционная схема привода строится в соответствии с рис. 2.4, а. Двигатель 1 может быть любого типа (пневматический, гидравлический или электрический). Он кинематически связан со звеном 2, которое моделируется рычагом с массой т. Очевидно, что мощность двигателя 1 определяется, исходя из инерционности звена 2 и требуемого быстродействия. В соответствии с функциональным назначением системы она должна совершать возвратно-вращательные движения, периодически ускоряясь и замедляясь. При этом в конечных положениях звена 2 всегда устанавливают регулируемые упоры 3, позволяющие получить требуемую величину хода, и демпфирующие устройства 4. Энергия, которую выдает системе двигатель 1 на большей части хода, рассеивается демпфирующими устройствами на относительно малом перемещении. Чем больше эта энергия и, соответственно, выше быстродействие, тем мощнее должны быть демпферы, больше ускорения и силы, действующие на элементы системы.
Следовательно, при увеличении быстродействия и повышении Мдв требуемый момент Мдем возрастает значительно быстрее вследствие того, что он действует на существенно меньшем участке перемещения. При этом значительно возрастают ускорения, а следовательно, нагрузки на участке торможения. Следует подчеркнуть, что повышать быстродействие в традиционной схеме путем увеличения мощности двигателя можно лишь до определенного, довольно низкого, предела. Существование этого предела обусловлено тем, что в качестве ограничений при выборе двигателя выступают его массогабаритные показатели и установленная мощность [10].
В более рациональной структуре привода (рис. 2.4, в), в отличие от традиционной, имеется аккумулятор механической энергии в виде упругого элемента 5 с жесткостью с, а вместо демпферов-упоров установлены управляемые упоры-фиксаторы 6. При среднем положении подвижного звена 2 между опорами-фиксаторами пружина 5 находится в свободном состоянии и ее усилие cq = 0. В начальном положении система поджимается к упору — фиксатору усилием cqA, где qA — амплитуда перемещения звена 2.
По команде на выполнение движения магнит фиксатора убирает упор и звено 2 под действием усилия пружины начинает разгоняться за счет перехода потенциальной энергии упругого элемента в кинетическую энергию звена. После прохождения среднего положения (q = 0) звено 2 начинает тормозиться за счет обратного перехода его кинетической энергии в потенциальную энергию пружины.
Очевидно, что если бы не было трения, то звено 2 обязательно достигло симметрично установленного второго фиксатора и его скорость в этом положении была бы равна нулю; наличие же трения в системе обуславливает необходимость установки привода 1. В рассматриваемой схеме привод используется не для разгона инерционного звена (на что в традиционной схеме затрачивается основная мощность), а только для компенсации потерь на трение. Поэтому схему отличает существенно меньшая мощность привода, а быстродействие от нее не зависит. Оно определяется собственной частотой системы и может выбираться с учетом жесткости пружины 5 и массы звена 2. Система привод-упругий элемент конструктивно легко выделяется в отдельный блок, получивший название «рекуператор».
При такой организации привода автоматически обеспечиваются важные характеристики, а именно плавность разгона и торможения, а также выход на упоры практически с нулевой скоростью, что устраняет необходимость в демпферах. Благодаря настройке системы путем регулирования момента двигателя его работа всегда равна работе сил трения; 5) = 53 (рис. 2.4, г). Важно, что в этой схеме S2 = 0, т. е. нет необходимости «сжигать» излишки энергии в демпфере. Вопросы динамики цикловых систем с рекуперацией энергии подробно рассмотрены в гл. 9. Здесь отметим, что построение привода на принципах рекуперации энергии позволяет в -10 раз снизить потребляемую им мощность и в 2-3 раза увеличить быстродействие робота.