2.2.2 Параметры измеряемые акселерометрами и характеристики
Схематично, параметры, измеряемые акселерометрами, можно сгруппировать в следующие классы:
-измерение вибрации: объект вибрирует, если он производит колебательные движения относительно положения равновесия. Вибрацию измеряют в транспортной и аэрокосмической промышленности, а также на промышленном производстве.
-измерение ударных ускорений: внезапное возбуждение структуры, создающее резонанс. Ударный импульс может создаваться взрывом, ударом молотка по предмету или в результате столкновения с другим объектом.
-измерение движения: медленное перемещение со скоростью от доли секунды до нескольких минут, например, перемещение руки робота или подвеска автомобиля.
-сейсмоисследования: измерения малых перемещений и низкочастотной вибрации. Такие измерения требуют специализированных малощумящих акселерометров с высокой разрешающей способностью. Акселерометры для сейсмоисследований контролируют движения мостов, полов, а также определяют землетрясения [6].
Поперечная чувствительность. Акселерометры в некоторой степени чувствительны к колебаниям в перпендикулярной к оси максимальной чувствительности плоскости. Эта поперечная чувствительность измеряется во время заводской калибровки при возбуждении механическими колебаниями с ускорением 100 м/с 2 и частотой 30 Гц и выражаются в процентах от значения чувствительности в направлении оси максимальной чувствительности. Большинство акселерометров имеют идентификацию угла минимальной поперечной чувствительности.
Частотная характеристика. Приводимые среди технических данных значения верхнего предела рабочего частотного диапазона акселерометра соответствуют 30% и 22% от его резонансной частоты после монтажа на объекте и ограничивают сверху диапазон, в котором погрешность не превышает соответственно 10% и 5%. При определении верхнего предела рабочего частотного диапазона предполагается надежное крепление акселерометра к поверхности объекта[7].
Ненадежное крепление уменьшает резонансную частоту закрепленного акселерометра и обуславливает сужение его рабочего частотного диапазона. Нижний предел рабочего частотного диапазона акселерометра сильно зависит от параметров используемого вместе с ним предусилителя.
Частотный диапазон от долей Гц до 60 кГц (предел +10%)
Температурный диапазон -74 0 до +250 0 С
Фазовая характеристика и демпфирование. Малое демпфирование акселерометров Брюль и Къер способствует достижению острого резонанса и минимального искажения в частотном диапазоне, простирающимся приблизительно 30% от резонансной (после монтажа на объекте) частоты. На частотах ниже упомянутого предела фазовая характеристика соответствует углу 0 0 ±1 0 .
Динамический диапазон от 20 мкм/c -2 до 1000 км/с -2 . Рабочий динамический диапазон акселерометра является диапазоном, в котором амплитуда отдаваемого им электрического сигнала пропорциональна ускорению механических колебаний его основания [7].
Верхний предел. Как правило, чем меньше по размеру акселерометр, тем больший уровень вибрации можно измерить. Верхний предел зависит от типа измеряемой вибрации и определяется силой, приложенной на пъезоэлемент и механической прочностью элемента.
Для акселерометров со встроенными предусилителями максимальные значения механических колебаний и ударов, являются значениями верхнего предела их рабочего динамического диапазона. Максимально допустимые при перевозке и обращении с этими акселерометрами значения ударов приведены.
Максимальные значения ударов и механической вибрации определены как вибрация, воздействующая в любом направлении, и в частотном диапазоне с верхним пределом, равным 1/3 резонансной частоты закрепленного акселерометра.
При измерении кратковременных переходных сигналов нужно учитывать обуславливаемую резонансом в области высоких частот реверберацию, то есть медленно затухающие паразитные колебания. В качестве практического правила можно принять, что для сохранения не превышающей 5% погрешности при эксплуатации под воздействием полусинусоидальных ударов необходимо, чтобы длительность последних превышала значение 10/fR, где fR — резонансная частота, закрепленного акселерометра.
Нижний предел. Теоретически выходной сигнал пъезоэлектрического акселерометра линеен до ускорения сейсмической массы, вызванного термическим шумом, но на практике нижний предел определяет собственный шум измерительной системы и условия окружающей эти акселерометры среды. Подробная информация по выбору необходимого акселерометра рассмотрим далее [7].
Электрический импеданс. Поскольку сопротивление утечки имеет большое значение, акселерометры можно рассматривать как емкости и значения емкости, измеренные на частоте 160 Гц. Акселерометры можно рассматривать как источники напряжения с идеальным выходным импедансом для выходного источника равным нулю. Выходной импеданс этих акселерометров определяется как максимальное сопротивление в Омах.
2. Датчики вибраций
Важными параметрами, характеризующими техническое состояние элементов конструкции самолета, силовой установки и самолетного оборудования являются параметры вибрации.
Параметрами, характеризующими вибрацию, является ее частота f, амплитуда вибросмещения А (м, мм), виброскорость V (м/с), виброускорение ав (м/с 2 ) или виброперегрузка nв. Они связаны между собой следующими соотношениями:
Здесь – мгновенное смещение точки от исходного положения при гармоническом движении; А – амплитуда смещения (мм).
Основной задачей виброметрии при летных испытаниях является измерение виброускорений (или виброперегрузок), хотя в отдельных случаях представляют интерес параметры виброскорости и вибросмещения. Например, при оценке вибраций силовой установки предпочтительней измерять виброскорость. Поэтому, учитывая особенность газотурбинных двигателей, заключающуюся в том, что в спектрах амплитуд вибросмещений их корпусов доминируют низкие частоты, в спектрах виброскорости – средние, а в спектрах виброускорений – высокие частоты, измерения указанных параметров вибрации осуществляют чаще с помощью акселерометров с последующим интегрированием электрических сигналов датчиков и применением соответствующих полосовых фильтров.
Все датчики вибраций построены на основе сейсмических систем, использующих инерцию твердых тел, и в практике летных испытаний пока не отдается предпочтение датчикам, построенным на других физических принципах.
Диапазон измеряемых в полете виброперегрузок составляет примерно ±0,1. 150 относительных единиц в частотном диапазоне 1. 15 000 Гц. Допустимая погрешность измерения виброперегрузки не должна превышать 5. 7%.
Наиболее широкое применение для измерения виброперегрузок получили пьезоэлектрические и индуктивные акселерометры. Причем первые охватывают по частоте весь спектр исследуемого параметра, начиная с долей герца, тогда как индуктивные акселерометры используются в низкочастотной (0. 400 Гц) области.
В пьезоэлектрическом акселерометре (а также в индукционном датчике виброскорости) осуществляется прямое преобразование механической энергии движения в электрическую. Поэтому эти датчики по принципу действия являются генераторами электрических сигналов и не требуют специального источника питания.
В индуктивном датчике (а также в полупроводниковом) под воздействием измеряемой величины изменяются параметры электрической цепи (L, R), и поэтому они получили наименование параметрических. Эти датчики требуют специального автономного источника питания (генератора несущей частоты или постоянного тока).
Работа пьезоэлектрического акселерометра основана на физическом явлении пьезоэффекта, т.е. свойстве возникновения зарядов на гранях некоторых видов кристаллов при их деформации. Чувствительным элементом датчика является пьезоэлемент, являющийся одновременно электромеханическим преобразователем и пружиной сейсмической системы. К нему крепится инерционная масса.
Все пьезоэлектрические материалы можно условно разделить на естественные кристаллы и искусственную пьезокерамику. Чувствительные элементы акселерометров для летных испытаний выполняются только из пьезокерамических материалов, приобретающих пьезоэлектрические свойства после их выдержки в электрическом поле. Пьезокерамика обладает интегральными свойствами ее микрокристаллов. Возможность получения пьезокерамических материалов с требуемыми свойствами путем введения модифицирующих присадок, а также изготовления элементов сложной формы (диски, цилиндры, шайбы) при относительной простоте и дешевизне, обусловили широкое применение пьезокерамики в качестве чувствительных элементов пьезоэлектрических датчиков.
Основными характеристиками пьезокерамики являются:
- пьезомодуль d1, определяющий чувствительность материала и величину электрического заряда q, генерируемого при приложении силы F,
- диэлектрическая проницаемость, влияющая на электрическую емкость С акселерометра, включая емкость кабеля.
Основное уравнение для пьезоэлектрического материала имеет вид , где U – напряжение на выходе датчика.
Собственную частоту датчика определяют модуль упругости и плотность материала пьезокерамики.
Пьезокерамика на основе цирконата–титаната свинца имеет температурный диапазон до 200 0 С. Для более высоких температур используются специальные высокотемпературные материалы, основанные на применении различных структур с рабочей температурой 400. 600 0 С. Так, например, некоторые чувствительные элементы датчиков выполнены из материала со слоистой структурой на основе титаната висмута, модифицированного окисью натрия. Чувствительные элементы могут испытывать деформации растяжения–сжатия и сдвига по поверхности пьезопластины. Применение той или иной схемы деформации в значительной мере определяет конструкцию датчика.
Высокими качествами обладают акселерометры с деформацией сдвига пьезоэлементов. Акселерометр выполнен в герметичном корпусе. Он практически нечувствителен к деформациям основания и стенок корпуса. Конструкция датчика центрирована (центр массы подвижной системы совпадает с центром симметрии пьезоэлементов), что снижает поперечную чувствительность акселерометра. Повышенная помехозащищенность датчика обусловлена наличием двухпроводной изолированной от корпуса датчика линии связи.
Пьезоэлектрические акселерометры не имеют специальной системы демпфирования. Ввиду малого успокоения, верхняя граничная частота измеряемого параметра составляет обычно 0,3 от собственной частоты инерционной массы датчика. Собственная частота датчика, установленного на объект, массой, многократно превышающей инерционную массу датчика, примерно на 4% выше собственной частоты свободного датчика. Под действием силы при ускоренном движении на обкладках пьезоэлемента возникает электрический заряд, сохраняющийся лишь при бесконечно большом входном сопротивлении измерительной цепи. Поскольку это требование трудно выполнить, пьезоэлектрические датчики применяют только для измерения динамических процессов.
Согласование выхода пьезоэлектрических датчиков осуществляется с помощью автономных усилителей напряжения или заряда. В первом случае напряжение на выходе усилителя , где – коэффициент усиления усилителя;
Сд, Скаб, Свх – емкости соответственно датчика, кабеля, входа усилителя.
Как видно, UВЫХ зависит от Скаб (длины кабеля). Это обстоятельство вынуждает устанавливать усилитель (истоковый повторитель) в зоне установки датчика. Длина кабеля между датчиком и усилителем, как правило, не превышает 1,2 м. При этом выходной сигнал датчика уменьшается на 10. 20%. Наличие усилителя заряда позволяет без заметного снижения сигнала датчика применять кабельные линии связи требуемой длины. Выходное напряжение в этом случае , где Собр – емкость схемы обратной связи усилителя. При выбранных значениях , . Таким образом, выходное напряжение усилителя заряда пропорционально величине заряда на электродах чувствительного элемента акселерометра (что и определило название данного типа усилителей) и практически не зависит от емкостей датчика и линии связи. Это позволяет вынести усилитель из зоны установки датчика и упрощает эксплуатацию аппаратуры. Кроме того, при k >> 1 выходной сигнал не зависит от коэффициента усиления усилителя и определяется только стабильностью емкости обратной связи. При работе акселерометра с усилителем заряда нижняя граница частотного диапазона расширяется до долей герца. Это обеспечивается возможностью применения усилителя с большой входной емкостью.
Принцип работы низкочастотного индуктивного акселерометра основан на изменении сопротивления магнитной цепи, происходящем при перемещении инерционной массы – якоря магнитопровода в воздушном зазоре между катушками индуктивности. Чувствительный элемент акселерометра состоит из двух плоских пружин, очерченных по дуге окружности и изготовленных за одно целое соответственно с верхней и нижней половинами корпуса датчика. Пружины в центре участка соединены стержнем, несущим инерционную массу. Катушки индуктивности размещены в соответствующих половинах корпуса. Схема преобразования измеряемого параметра в электрический сигнал идентична схеме индуктивного датчика давления. Конструкция датчика симметрична относительно измерительной оси и практически свободна (погрешность <0,01%) от неизмеряемых составляющих линейного ускорения. Датчик не демпфирован, коррекция амплитудно–частотной характеристики осуществляется с помощью фильтра низких частот. Следует иметь в виду, что коррекция амплитудно–частотной характеристики в электрической части датчика не устраняет недостатков его механической части, обусловленных резонансными колебаниями чувствительного элемента и приводящих при этом к вынужденным динамическим погрешностям – помехам.
Решающее достоинство полупроводниковых акселерометров, по аналогии с соответствующими датчиками давления, заключается в их миниатюрном исполнении, обеспечивающем, например, измерение форм колебаний несущих поверхностей конструкции известным бездренажным методом.
Основными составляющими суммарной погрешности датчиков вибрации являются температурная и установочная погрешности. Причем, для генераторных датчиков доминирующей является мультипликативная составляющая, а у параметрических акселерометров прибавляется и аддитивная составляющая погрешности. Следует, однако, учитывать влияние деформации основания, влажность, акустическое давление др.
Основные характеристики чувствительного элемента пьезоэлектрического датчика, такие как пьезомодуль, определяющий чувствительность датчика, и диэлектрическая проницаемость, характеризующая электрическую емкость датчика, существенно зависят от температуры. Температура, при которой наблюдается максимум диэлектрической проницаемости датчика (так называемая температура Кюри), является предельной для применения пьезокерамических материалов, после чего наступает необратимое изменение их структуры и пьезоактивности. Рабочая температура датчиков составляет» примерно, 0,5. 0,7 температуры Кюри.
При работе акселерометра с усилителем заряда чувствительность датчика определяется пьезомодулем, пропорционально изменяющимся, в свою очередь, в зависимости от температуры. При работе акселерометра с усилителем напряжения чувствительность датчика пропорциональна изменению пьезомодуля и обратно пропорциональна изменению диэлектрической проницаемости. В данном случае имеет место эффективная самокомпенсация температурной погрешности датчика. Поэтому при одинаковых значениях температуры датчика температурные погрешности при работе с усилителями напряжения и заряда неоднозначны. Рабочий диапазон температур акселерометров, выполненных из пьезокерамики марок ЦТС, при работе с усилителем заряда и одинаковых температурных погрешностях снижается примерно в два раза.
Уменьшение температурной погрешности осуществляется путем целенаправленного выбора пьезокерамических материалов датчиков. Распространенным методом уменьшения температурной погрешности акселерометров является метод схемной термокомпенсации, основанный на включении последовательно с емкостью датчика специального компенсационного конденсатора с необходимой зависимостью изменения его емкости от температуры.
Температурная погрешность индуктивных и полупроводниковых акселерометров обусловливается явлениями, имеющими как механическую, так и электрическую природу. При изменении температуры окружающей среды изменяются геометрические размеры и упругие свойства механических элементов, магнитные свойства материалов, электрические параметры. Поэтому для уменьшения погрешности применяется конструктивно–технологическая коррекция ее составляющих, обеспечивающая стабильность во времени физических свойств и параметров датчика. Сюда же следует отнести стабилизацию напряжения и частоты источников питания. Другие источники погрешностей минимизируются применением упомянутых выше конструктивных и схемных решений.
Надежность и прочность механического соединения акселерометра и объекта является основным условием, обеспечивающим минимальную установочную погрешность датчика. На самолете акселерометры крепят с помощью стальных шпилек, винтов или клея (рис. 4а).
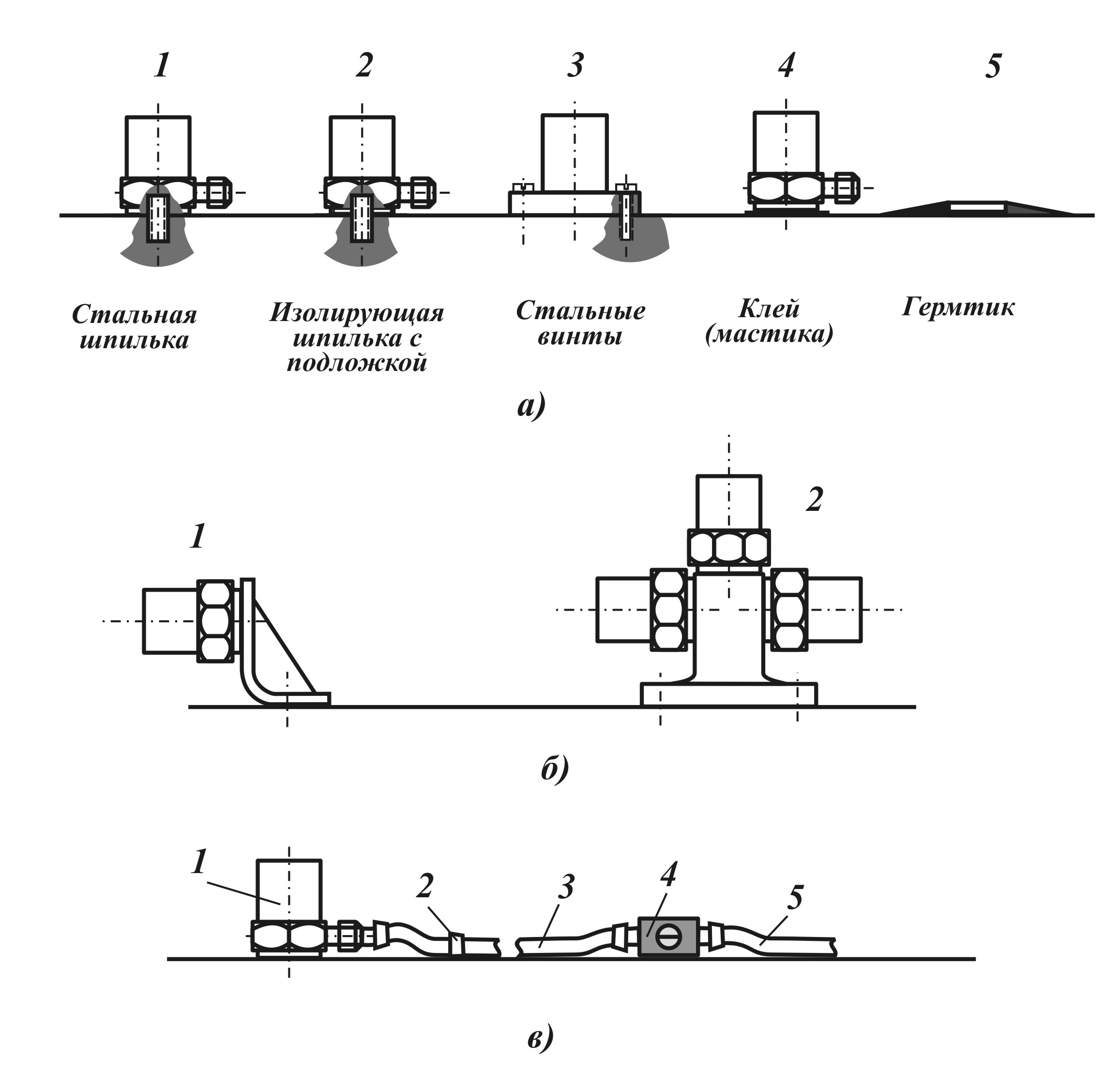
Рис. 4. Способы крепления акселерометров:
а) – способы крепления: 1, 2, 3, 4 – пьезоэлектрических; 3, 1 – индуктивных; 5 – полупроводниковых; б) – вспомогательные элементы крепежа: 1 – уголок; 2 – кронштейн для измерений по трем осям; в) крепление с кабелем: 1 – акселерометр; 2 – скоба; 3 – кабель; 4 – переходник; 5 – кабель
Характер контактирования датчика с объектом, по существу, является решающим в обеспечении получения достоверной информации; поэтому необходимо выполнять предписанные требования к креплению датчика и к местам их установки. Соединение датчика с объектом должно быть жестким. Самым надежным методом является крепление акселерометра стальной шпилькой на гладкой и плоской поверхности. При измерении виброперегрузок с частотами до 2. 3 кГц эти способы крепления не являются критическими, пока акселерометр закреплен непосредственно на поверхности объекта. Если датчик устанавливается на тонкостенную конструкцию или малогабаритные детали, масса которых соизмерима с его массой, влияние массы датчика, присоединенной к объекту, оценивается по формуле
где ад, ао – виброускорение конструкции соответственно с датчиком и без датчика; mк – масса конструкции или испытываемой части конструкции; mд – масса датчика.
Резонансная частота конструкции также может измениться под влиянием массы датчика. Этот эффект выражается формулой ,
где fк – резонансная частота конструкции без датчика; fд – резонансная частота конструкции с датчиком.
При измерении высокочастотных и импульсных вибраций для уменьшения разброса чувствительности за счет сминания наиболее высоких выступов поверхностей соприкосновения, датчик необходимо не менее 3-х раз ввернуть и вывернуть из резьбового соединения. Контактирующие поверхности промываются бензином и смазываются силиконовым маслом. Подготовка мест крепления (сверление, нарезка резьбы, выравнивание поверхности) для датчиков, предназначенных для измерения ударных ускорений, должна быть выполнена очень тщательно. Завышение внутренних и средних диаметров резьб, отклонения от заданной нормы неплоскостности или допуска на угол конической резьбы недопустимы.
Если предусматривается приклеивание датчика, то необходимо обращать внимание на подготовку склеиваемых поверхностей, создание нужных усилий поджатия, теплового режима при отверждении связующего и т.п. Крепление с помощью изолирующих переходных втулок, магнитного держателя и других промежуточных деталей всегда снижает рабочую полосу частот.
При креплении датчиков на специальных кронштейнах (см. рис. 4б) следует обеспечить их необходимую жесткость, которая выбирается так, чтобы собственная частота системы датчик – кронштейн была существенно выше частот измеряемого процесса. Резонансные свойства кронштейнов должны быть тщательно исследованы.
При эксплуатации пьезоэлектрических датчиков вследствие изгибов и кручения кабеля возникает так называемый кабельный эффект. На внутренней поверхности изоляции под действием трения появляются электростатические заряды, которые при отслоении изоляции медленно стекают по тонкому проводнику на внутренней поверхности диэлектрика. Под действием вибраций или ударов происходит хаотическое образование и стекание зарядов, в результате чего в проводнике возникает напряжение, образующее кабельный шум. Для борьбы с ним применяют специальные антивибрационные кабели с рабочим диапазоном температур до 400 0 С. Тем не менее, кабель необходимо крепить на объекте так, чтобы исключить возможность его деформирования (см. рис. 4в). Боковое расположение разъема датчика позволяет надежно осуществить монтаж кабеля на объекте.
Виброакустическая диагностика технических объектов
массу воздействует сила F ( t ). Это единственная сила, действующая на массу m , и поэтому она пропорциональна ускорению последней, т.е. ускорению всей системы:
| F ( t ) = mx && ( t ). | (3.2) |
| Рис. 3.1. Современный акселерометр | Рис. 3.2. Разрез датчика |
Когда на пьезоэлемент действует сила, на его поверхностях появляется электрический заряд. Масса воздействует на чувствительный элемент с такой же по величине и противоположной по направлению силой. Так как заряд Q ( t ) и напряжение U ( t ) на пьезоэлектрическом элементе прямо пропорциональны величине этой силы, то на обкладках чувствительного элемента появляется заряд, пропорциональный ускорению:
| Q ( t ) = F ( t ) d = mx && ( t ) d = Kx && ( t ), | (3.3) |
где d – пьезомодуль керамики ( d max ≈ 3·10 –10 Кл/Н); Q – заряд; K – коэффициент преобразования потоку. Пьезоакселерометры имеют чувствительность не только в основном (главном) направлении, но и преобразуют сигнал в поперечном направлении. Поперечная чувствительность вибродатчика – это относительная величина, равная отношению максимальной величины сигнала на входе датчика от вибрации, действующей в направлении, перпендикулярном рабочей оси, к сигналу отвибрациитогожеуровня, действующего вдольрабочейоси. Данные о поперечной чувствительности датчика представляются в виде диаграммы направленности либо указанием максимального значения поперечной чувствительности, определенного по диаграмме направленности. Поперечную чувствительность датчика рекомендуется определять на базовой частоте или одной из частот, лежащей в рабочем диапазоне частот датчика, с учетом характеристик вибростенда. 51
Кроме того, датчик обладает деформационной чувствительностью, которая возникает из-за изгибных деформаций объекта в месте крепления акселерометра, что вызывает деформацию пьезопластин и возникновение на выходе датчика паразитного сигнала. Для коэффициента преобразования по напряжению пьезоэлектрического датчика вибрации справедлива следующая формула:
| K = d | Q | , | (3.4) |
| C | |||
а для коэффициента преобразования по заряду:
где d – пьезомодуль; Q – заряд; C – емкость чувствительного элемента. На коэффициент преобразования пьезоэлектрического датчика, включенного на вход усилителя напряжения, влияет длина соединительного кабеля (активное и емкостное сопротивления). Сдвиговые и изгибные конструкции пьезодатчиков принципиально обладают наибольшей чувствительностью и наименьшей поперечной чувствительностью. Пьезоэлемент может быть выполнен из кварца или синтетических керамических пьезоматериалов, которые работают достаточно надежно, причем даже при более высоких температурах, чем позволяет кварц. Если температура пьезоэлемента повышается и достигает так называемой температуры Кюри, то его пьезоэлектрические свойства утрачиваются. В этом случае датчик считается неисправным и не подлежащим ремонту. Среди других конструкций одной из наиболее популярных является так называемый бендер (от англ. bend – изгиб), в котором используется консольно закрепленный пьезоэлемент с расположенным на нем небольшим грузом. Пьезоакселерометры обладают чрезвычайно большой линейностью по амплитуде, поэтому у них очень большой динамический диапазон. Нижний предел ускорения, который они могут воспринимать, определяется только электрическим шумом электроники, а высшие уровни ограничены только пределом разрушения самого пьезоэлемента. Диапазон допустимых амплитуд может охватывать восемь порядков, или 160 дБ! При правильном обслуживании пьезоакселерометр сохраняет стабильность и калибровку в течение длительного времени. Акселерометр можно повредить двумя способами: подвергнуть его воздействию избыточной температуры или уронить его на твердую поверхность. Общим правилом является ежегодная поверка акселерометров. Частотный диапазон акселерометров очень широк: от очень низких частот до десятков килогерц. Высокочастотная характеристика ограничена резонансной частотой системы сейсмическая масса – пьезоэлемент. Ориентировочно акселерометр считается применимым для измерений на частотах, не превышающих 1/3 52
его собственной частоты (при более жестких требованиях к линейности верхнюю границу устанавливают равной около 1/5 собственной частоты). Выше этой величины сигнал будет усиливаться, однако его можно использовать, если сделатьсоответствующую поправку наизменение чувствительности. Некоторые из применяемых сегодня в промышленности акселерометров принадлежат к типу ICP, т.е. имеют встроенный микропредусилитель. Этот предусилитель питается постоянным током по сигнальному проводу, ипоэтому для него не требуются дополнительные кабели. Устройство, к которому подключается такой акселерометр, должно обеспечивать соответствующее питание датчика. Из-за наличия предусилителя ICP-акселерометры имеют спад частотной характеристики в области низких частот. Обычно у большинства распространенных акселерометров общего назначения этот спад начинается приблизительно с 1 Гц. Для измерений в области очень низких частот используют специальные модели, допускающие измерения вплотьдо0,1 Гц. Для усиления сигнала пьезоэлектрического датчика часто применяют дифференциальные усилители. Преимущество дифференциального согласующего усилителя перед недифференциальным заключается в том, что он компенсирует синфазные помехи. Помимо пьезоэлектрических производятся также так называемые пьезорезистивные датчики, использующие эффект пьезорезистивности – изменения электрического сопротивления некоторых кристаллов под действием приложенных механических сил. Пьезорезистивные датчики позволяют производить измерения вплоть до 0 Гц. Для получения сигнала, пропорционального смещению, скорости или ускорению, вводят операции интегрирования сигнала с акселерометра. При однократном интегрировании сигнал пропорционален скорости, при двойном интегрировании – смещению. Вид преобразования и, соответственно, частотный диапазон определяются характером исследуемых процессов. В низкочастотном диапазоне (0–500 Гц) колебательные процессы целесообразно измерять в режиме измерения перемещения, в диапазоне средних частот (500– 2000 Гц) – в режиме измерения скорости, а в высокочастотном диапазоне (2– 20 кГц и выше) – в режиме измерения ускорения. 3.1.3. Датчик скорости Датчик скорости (велосиметр) был одним из первых вибропреобразователей. Он состоит из проволочной катушки, внутри которой находится магнит на пружинах (pис. 3.3). Когда корпус датчика приходит в движение, магнит по инерции стремится остаться в покое. Вследствие относительного перемещения катушки и магнита, в первой возникает индукционный ток, который пропорционален скорости перемещения корпуса датчика. 53
Напряжение на выходе датчика пропорционально не только скорости V относительного перемещения катушки и магнита, но и длине проводника в катушке:
| U вых = – BlV = – Blx ( t ), | (3.6) |
где B – магнитная индукция, Тл; l – Рис. 3.3. Датчик скорости (велосиметр) общая длина проводника , находяще — гося в поле, м. Таким образом, это устройство вырабатывает электрический сигнал, прямо пропорциональный виброскорости. Он является самогенерирующим и не требует дополнительной согласующей электроники, а также обладает сравнительно невысоким выходным электрическим импедансом, что делает его слабо чувствительным к наводкам. Наряду с перечисленными достоинствами, датчик скорости обладает и большим количеством недостатков. Он достаточно тяжел, сложен и дорогостоящ. Кроме того, его частотная характеристика охватывает диапазон от 10 до 1000 Гц. Пружина и магнит образуют систему с собственной частотой порядка 10 Гц. Этот резонанс демпфируют. На практике демпфирование чувствительно к температуре из-за чего амплитудно-фазочастотная характеристика датчика также зависит от температуры. 3.1.4. Датчик относительной вибрации Датчик относительной вибрации (рис. 3.4), который также называют токовихревым датчиком или датчиком смещения, или датчиком зазора, представляет собой стационарно устанавливаемое устройство. Для него необходим усилитель для согласования сигнала, чтобы сформировать на выходе напряжение, пропорциональное расстоянию между торцом датчика и валом. Принцип его действия основан на магнетизме, и поэтому он чувствителен к разного рода магнитным аномалиям вала. Во избежание зашумления выходного сигнала датчика необходимо тщательно следить, чтобы вал не был намагничен. Важно понимать, что этот датчик измеряет относительное смещение подшипника и цапфы, а не общий уровень вибрации вала или корпуса. Обычно датчики зазора устанавливают на больших машинах с подшипниками скольжения. В этом случае они используются для своевременного обнаружения неисправностей подшипников иаварийногоотключения оборудования. 54
Эти датчики часто устанавливают попарно и ориентируют под 90° друг к другу. Их сигналы могут подаваться на вертикальную и горизонтальную оси осциллографа для получения орбиты, т.е. траектории движения цапфы внутри подшипника. Амплитудно-частотная характеристика датчиков смещения простирается от 0 до 10 000 Гц. 3.1.5. Способы установки датчиков Существует по крайней мере три основных способа установки виброакустических датчиков для проведения измерений: 1) жесткое крепление с помощью шпильки, винтов, клея; 2) быстросъемное крепление с помощью магнита, воска, липкой ленты, специального держателя ит.п.;
Рис. 3.4. Датчик относительной вибрации: 1 – индукционная катушка; 2 – усилитель для согласования сигнала; 3 – установочный стакан датчика; 4 – корпус датчика; 5 , 6 – кабели питания и измерения; 7 – корпус подшип- ника; 8 – вал (торец вала)
3) обеспечение контакта датчика с объектом путем прижатия и удержания его рукой к объекту. Виброакустический сигнал передается через специальный щуп или элементы корпуса, контактирующие с объектом. Такие измерения называют измерениями с помощью щупа . 3.2. Модель виброакустического сигнала Математическим образом сигнала служит функция времени s ( t ), заданная на интервале [0, T ]. Способность сигнала предоставлять информацию о состоянии объекта обусловлена тем, что некоторые его свойства имеют возможность изменяться в зависимости от изменения состояния. Для того чтобы диагностическая задача была разрешимой, различным состояниям объекта должны соответствовать различные сигналы, причем это соответствие должно быть взаимно однозначным. При этом необходимо установить, чем могут отличаться друг от друга сигналы и как количественно оценить их различие. Этот вопрос сводится к выяснению различия между собой функций. С понятием функции y = f ( x ) обычно связывают три элемента: 1) независимую переменную x ; 2) зависимую переменную y ; 3) правило f , устанавливающее зависимость величины y от значений величины x. 55
В элементарном анализе существенным считается способность величин x и y изменяться, а правило f считается каждый раз заданным и неизменным при рассмотрении. Объектом исследования являются отдельные функции. В данном случае придется отойти от такого взгляда на функцию. Функцию целесообразно представлять в виде единого объекта, обладающего некоторыми признаками, которые позволяют отличить одну функцию от другой. Таким образом, существенна возможность изменения самого правила f , вы- ражающего функциональную зависимость. Вопрос о характере изменения величин x и y отходит на второй план. Это связано с тем, что информация, которую переносят сигналы, заключена в правиле f , устанавливающем зависимость между переменными величинами. При таком рассмотрении исходным понятием является не индивидуальная функция, а класс функций, заданный определенным образом. Различные сигналы – это функции, принадлежащие определенному классу. Поэтому вопрос о передаче информации сигналами – это вопрос об изменении функций. Для формирования диагностических признаков дефектов и неисправностей необходимо установить, в чем проявляется отличие функций. Класс диагностических сигналов обычно задают двумя параметрами: длительностью сигнала T и шириной спектра ∆f c = [ f н , f в ], где f н – нижнее значение частоты; f в – верхнее значение частот диагностируемого объекта. Значение этих параметров устанавливается для данного класса объектов. При выборе T обычно приходится принимать компромиссное решение. Чем больше длительность анализируемого сигнала, тем более полные и надежные сведения о состоянии объекта можно из него извлечь. Но, с другой стороны, если длительность сигнала велика, то очень трудно обеспечить в течение этого времени стабильность условий работы объекта и аппаратуры. При аналого-цифровом преобразовании сигнала оптимальная его длительность определяется из погрешности получения оцифрованного сигнала и разрешающей способности по частоте. При этом необходимо задаться длиной выборки и периодом дискретизации, которые определяют и ширину спектра сигнала. При многоканальных измерениях длина выборки будет определять время опроса датчиков. От длительности сигнала T зависит и время, необходимое для постановки диагноза. Требуемая полоса частот [ f н , f в ], в которой лежат спектры сигналов, излучаемых объектом при его различных состояниях, определяется главным образом длительностью соударений и частотной характеристикой канала, по которому сигналы проходят на первичный преобразователь. По различным причинам, спектр сигнала приходится искусственно ограничивать с помощью соответствующих фильтров. Важно в период анализа модели объекта диагностирования правильно выбрать диапазон частот сигнала. При необоснованном расширении этого диапазона диагностическая аппаратура может быть в большой степени подвержена воздействию помех. 56
Итак, будем рассматривать класс сигналов фиксированной длительности T, спектры которых лежат внутри фиксированного частотного диапазона [ f н , f в ] . Чтобы рассмотрению придать математический характер, прежде всего необходимо решить вопрос о математической форме представления сигнала. Эта задача решается теорией аппроксимации, в которой рассматриваются способы приближенногопредставления функций одногокласса функциями другого класса. Способ задания функции несущественен. Задача заключается в том, чтобы найти такую функцию F ( t ), которая была бы близка в определенном смысле кзаданной функции s ( t ) и могла служить заменителем последней. Ограничим ее тем, что вместо произвольной функции F ( t ) будем для приближения использоватьфункции определенного класса, аименно многочлен вида
| n | |
| F ( t ) = ∑ a i ϕ i ( t ), | (3.7) |
i =0 где a i – постоянные коэффициенты; φ i ( t ) – известные функции. В качестве функций вида φ i ( t ) целесообразно использовать функции, имеющие простую структуру, например, систему функций вида 1, t , t 2 , . или 1, sin(ω 1 t ), cos(ω 1 t ), sin(2ω 1 t ), cos(2ω 1 t ), . Задачу аппроксимации в нашем случае можно сформулировать в следующем виде. Среди всех многочленов n -го порядка вида (3.7), где φ i ( t ) – известные функции, требуется найти такой многочлен, который был бы близок к заданной функции s ( t ). Для полной определенности этой формулировки необходимо уточнить, что понимают под близостью двух функций и что означает «найти многочлен». Для ответа на первый вопрос необходимо установить количественный критерий, который позволил бы оценивать сходство и различие между собой двух функций. Таких критериев существует несколько: а) критерий равномерного приближения; б) среднее отклонение как критерий близости функций; в) среднеквадратичное отклонение как критерий близости функций. 3.2.1. Составляющие виброакустического сигнала Виброакустический сигнал имеет сложную структуру, поэтому естественно попытаться разложить его на более простые части. Любой сигнал содержит полезную составляющую и помеху. Помеха – это та часть принимаемого сигнала s ( t ), которая препятствует точной расшифровке информации, содержащейся в сигнале. Наличие помех в диагностическом сигнале обусловливает погрешности диагностического решения. Принятый сигнал можно представить в следующем виде:
| s ( t ) = k ( t ) s 1 ( t ) + m ( t ), | (3.8) |
где s 1 ( t ) – полезная часть сигнала; k ( t ) и m ( t ) – помехи. 57
Первую из помех называют мультипликативной, вторую – аддитивной. Аддитивная помеха присутствует на выходе канала даже при отсутствии сигнала; мультипликативная появляется только совместно с сигналом. В виброакустической диагностике существуют следующие источники помех: 1) нестабильность внешних условий, в которых работает механизм. С этим источником связаны как мультипликативные, так и аддитивные помехи. Так, флуктуации скоростного режима и нагрузки механизма вносят в сигнал мультипликативную помеху; 2) наложения на сигнал, генерируемый исследуемой кинематической парой, колебаний, возбужденных другими парами механизма. Эта помеха аддитивна; 3) неполнота описания состояния, например, кинематической пары, выбранной совокупностью параметров. Так, состояние подшипника качения часто описывается всего одним параметром – радиальным зазором, а между тем на форму сигнала влияют и другие, неучитываемые свойства подшипника, например: волнистость беговых дорожек, овальность колец, качество посадки подшипника на вал и в гнездо и т.д. Влияние этих факторов следует рассматривать как аддитивную помеху, если их определение не входит в задачу диагностики; 4) аппаратурные помехи, возникающие в цепях диагностической аппа- ратуры. Помехи, о которых сейчас идет речь, нельзя смешивать с искажениями, которым подвергается диагностический сигнал при прохождении по каналам. В процессе диагностики виброакустический сигнал проходит по многочисленным цепям как в самом механизме до приема его датчиком, так и в блоках аппаратуры. Причем форма сигнала при прохождении его по цепи обычно меняется. Так, исходным сигналом является короткий импульс, вырабатываемый в кинематической паре при столкновении деталей, между тем датчик воспринимает не этот сигнал, а затухающее колебание. Но поскольку подобные искажения сигнала обусловлены известными свойствами канала, то, хотя бы в принципе, они могут быть устранены. Помехи в отличие от указанных искажений носят случайный характер и поэтому неизвестны заранее. Перед разработчиком системы диагностики стоит обычно много разнообразных задач, но в связи с упоминанием помех укажем две из них: выбор оптимальной системы параметров сигнала, которые в меньшей степени искажаются помехами, и выбор оптимального способа обработки сигнала, при которой влияние помех минимизируется. Решение первой задачи сводится в общем случае к поиску параметров сигнала, наиболее чувствительных к изменению параметров состояния механизма и малочувствительных к различным неконтролируемым флуктуациям. 58
Способы обработки сигнала направлены на подавление помех и очищение его от искажений, вызванных помехой. 3.2.2. Периодические колебания Отличительным признаком периодических колебаний является повторение колеблющейся величины через одинаковый промежуток времени, который называют периодом колебаний. Периодическим колебаниям бесконечно большой длительности соответствуют дискретные (линейчатые) спектры, состоящие из конечного или бесконечного множества отдельных спектральных линий. Простейшим видом периодических колебаний являются моногармонические колебания, прикоторых колеблющаяся величина изменяется позакону
| x ( t ) = C cos(ω τ + φ). | (3.9) |
Спектр моногармонического колебания содержит только одну наблюдаемую частоту. Полигармонический колебательный процесс (рис. 3.5) может быть представлен в виде суммы нескольких моногармонических колебаний с частотами, находящимися между собой в рациональном отношении:
| n | Рис. 3.5. Полигармонический | |
| x ( t ) = ∑ C k cos( ω k t + ω k ). | (3.10) | колебательный процесс |
k =1 Форма графика изменения колеблющейся величины во времени в зависимости от соотношения параметров k гармоник позволяет провести классификацию процессов, разделяя их на прямоугольные, пилообразные, трапецеидальные и другие колебания. Частный случай полигармонических колебаний – это бигармонические колебания, состоящие из суммы двухмоногармонических колебаний (рис. 3.6):
| x ( t ) = A 1 cos(ω 1 τ + φ 1 ) + A 2 cos(ω 2 τ + φ 2 ), | (3.11) |
угловые частоты которых ω 1 и ω 2 находятся между собой в рациональном отношении:
| S n | ( x ) = | 1 | + | 2 | (cos ω x − | 1 | cos3 ω x + | 1 | cos5 ω x + . ) = | ||||||
| 2 | π | 3 | 5 | ||||||||||||
| 1 | 2 | n | cos(2 k − 1) ω x | ||||||||||||
| = | + | ∑ ( − 1) k | . | ||||||||||||
| 2 | π k =1 | 2 k − 1 | |||||||||||||
Рис. 3.6. Биения ротора электродвигателя Вид бигармонического колебательного процесса зависит не только от соотношения между частотами и амплитудами обеих гармоник, но и от фазовых соотношений. При достаточной близости частот колебаний будут наблюдаться характерные биения процесса (см. рис. 3.6), при которых его полуразмах мед-
| ленно изменяется в пределах от A min = A 2 – A 1 ( A 2 ≥A 1 ) до A max = A 2 +A 1 . | ||
| Таким образом, | биение – это результат сложения двух | колебаний |
| с близкими частотами. | ||
| Преимущества | полигармонической модели возбуждения | колебаний |
в том, что она позволяет сконцентрировать внимание лишь на определенных частотах kf в , кратных основной частоте возбуждения колебаний f в диагностируемого узла, поскольку процесс локализации источников повышенной виброактивности агрегата состоит в выявлении источников возбуждения, вызывающих колебания на данной частоте. Квазиполигармоническая модель процесса возбуждения колебаний основана на представлении колебаний в виде суперпозиции узкополосных случайных процессов с кратными средними частотами. Квазиполигармоническая модель более адекватно, чем полигармоническая, описывает процесс возбуждения колебаний. Размытие линий спектра квазиполигармонической модели колебаний по отношению к дискретным составляющим полигармонической модели не является недостатком. 3.2.3. Непериодические колебания В общем случае спектральный анализ непериодических колебаний может давать бесконечно большую сумму гармонических составляющих, расстояние между спектральными линиями которых становится бесконечно малым, что превращает спектр из дискретного в непрерывный (сплошной). К числу непериодических установившихся колебаний относятся почти периодические колебания, например, в виде суммы нескольких гармоник, частоты которых не находятся между собой в рациональном отношении. Почти периодические колебания обычно имеют дискретный спектр с несоизмеримыми частотами гармоник. 60
Инструкция
На какой высоте ставить фотоэлементы на воротах
- автор: admin
- 27.07.2023
Как Установить Фотоэлементы На Откатные Ворота Фотоэлементы являются частью системы безопасности автоматических ворот. Они защищают от защемления воротами людей, автомобилей, животных итд. Как показывает опыт… Подробнее » На какой высоте ставить фотоэлементы на воротах
На какой частоте рекомендуется определять поперечную чувствительность датчика
- автор: admin
- 27.07.2023
Виброакустическая диагностика технических объектов массу воздействует сила F ( t ). Это единственная сила, действующая на массу m , и поэтому она пропорциональна ускорению последней,… Подробнее » На какой частоте рекомендуется определять поперечную чувствительность датчика
На какие виды разделяется казарменное освещение
- автор: admin
- 27.07.2023
Освещение помещений. Порядок освещения определяет командир полка. Казарменное освещение разделяется на полное и дежурное (неяркий темно-синий свет). В спальных помещениях в часы сна оставляется дежурное… Подробнее » На какие виды разделяется казарменное освещение
На какой персонал распространяются требования специальной подготовки
- автор: admin
- 27.07.2023
На какой персонал распространяются требования специальной подготовки? Вы находитесь на странице инструкции сайта Тестсмарт. Прочитав инструкцию, Вы узнаете функции каждой кнопки. Мы начнем сверху, продвигаясь… Подробнее » На какой персонал распространяются требования специальной подготовки
На какой высоте висит счетчик электроэнергии
- автор: admin
- 27.07.2023
На какой высоте должен быть установлен уличный электросчетчик (на столбе)? Не уверен, об одном и том же счётчике мы с вами полемизируем. У нас поставлены… Подробнее » На какой высоте висит счетчик электроэнергии