фрагмент






Профессия железнодорожного машиниста-оператора становится более сложной, и перед организаторами труда возникают и будут возникать все новые вопросы разумного и точного согласования характеристик машины с психофизиологическими особенностями человека. Управление быстро движущимся объектом, решение оперативных задач при дефиците времени, постоянная готовность к экстренному действию в условиях монотонии, увеличенные до 400-500 км плечи обслуживания -факторы, которые влияют на уровень его надежности. Результаты исследований специалистов ВНИИ железнодорожной гигиены (ВНИИЖГ) свидетельствуют, что за один рейс на локомотивную бригаду воздействуют до 10 тыс. факторов -раздражителей. Поддержание такого уровня состояния машиниста, при котором он может обеспечивать безопасность следования поезда — наиважнейшая задача современности.
Выходом из сложившегося положения может стать внедрение универсальной системы автоматизированного ведения поезда.
В настоящее время модельный ряд систем автоведения представлен широким спектром модификаций: УСАВП-ЧС2, УСАВП-ЧС2(КАУД)*, УСАВП-ЧС2-ЕКС, УСАВП-ЧС2К, УСАВП-ЧС2Т, УСАВП-ЧС4, УСАВП-ЧС4Т, УСАВП-ЧС6, УСАВПП(ЧС7), УСАВП-ЧС7(КАУД), УСАВП-ЧС7-ЕКС, УСАВП-ЧС200. Системы имеют ряд технических отличий, обусловленных спецификой локомотива и модификацией аппаратуры системы автоведения. Однако, пользовательский интерфейс во многом унифицирован, т.е. ввод команд и принципы управления системой сохраняются.
Предлагаемая Вам книга содержит подробную информацию о работе системы автоматизированного ведения поезда и множество конкретных практических указаний и рекомендаций по ее применению.
1 НАЗНАЧЕНИЕ И СОСТАВ СИСТЕМЫ УСАВПП
Система УСАВПП предназначена для автоматизированного управления электровозами пассажирского движения. Электровозы оборудуются согласно проектам ПКБ ЦТ ОАО «РЖД», номер проекта зависит от типа электровоза или системы.
Система выполняет энергетически рациональное автоматизированное управление тягой и всеми видами тормозов электровоза и обеспечивает точное соблюдение времени хода, задаваемого графиком движения или другим нормативным документом.
Кроме того, она имеет возможность выдачи машинисту предупреждающей звуковой и вспомогательной визуальной информации. Сообщения звуковой (речевой) информации созданы и записаны на основе руководящих документов ОАО «РЖД» по регламенту взаимной информации между членами локомотивной бригады.
1.1 Функциональные возможности УСАВПП
На основании информации об участке обслуживания и данных, принятых с борта электровоза, система УСАВПП обеспечивает:
• расчет оптимального, энергосберегающего времени хода поезда с учетом графика и расписания движения;
• определение фактической скорости движения;
• расчет времени, оставшегося до контрольной станции;
• сравнение фактической скорости движения с расчетной и определение скорости, для выполнения расчетного времени хода (с учетом мест действия ограничения скорости и показания локомотивного светофора);
• выбор тяговой позиции электровоза в зависимости от расчетной величины скорости;
• расчет координат пути и местоположения поезда относительно станции (платформы);
• корректировку места положения поезда (координаты).
На основании информации об участке обслуживания и проводимых измерений и расчетов система УСАВПП осуществляет:
• запись на сменный картридж РПДА-П параметров движения и управления;
• управление электровозом, оставляя приоритет управления за машинистом, при этом система автоведения:
— разгоняет поезд до расчетной скорости (энергетически рациональной);
— поддерживает движение с расчетной скоростью;
— снижает скорость движения при подъезде к местам действия постоянных или временных ограничений скорости;
— в зависимости от показания локомотивного светофора применяя служебное торможение останавливает поезд, не проезжая сигнала остановки, а сигнал уменьшения скорости обеспечивает проследование со скоростью, не более установленной для данного сигнала (при этом надо учитывать, что система УСАВПП «видит» только светофор на блок участке перед которым находится локомотив);
— отрабатывает сигнал о боксовании, снижая или отключая тягу при боксовании и восстанавливая ее после прекращения боксования.
• постоянное информирование машиниста:
— о рекомендуемых режимах движения (в случае ручного управления);
— о расчетном значении энергетически рациональной скорости (расчетной скорости) с точностью ± 1 км/час;
— о фактическом значении скорости поезда, с точностью ±1 км/час;
— о времени хода, оставшемся до контрольной станции, с точностью ±10 с;
— о длине пути до контрольной станции, с точностью 100 М (1 пикет);
— о координате начала ближайшего временного ограничения скорости с точностью индикации 100 М (1 пикет), при приближении к нему — о длине пути в м, оставшемся до места начала ограничения, а после въезда на место ограничения — о длине пути, оставшемся до конца его действия, с учётом длины поезда;
— о позиции тяги или о состоянии тормоза в режимах торможения и отпуска.
• вывод дополнительной информации по требованию машиниста:
— об астрономическом времени с дискретностью 1 с;
— о номере и названии перегона, на котором находится поезд;
— о диаметре обода колеса (бандажа) колесной пары, на которой установлен датчик ДПС;
— о координате, на которой находится поезд (км, пикет);
— о максимальной позиции тяги.
При необходимости машинист может изменить:
табельный номер; количество вагонов и вес поезда;
уставку якорного тока тяговых двигателей при разгоне; оперативное ограничение скорости; место временного ограничения скорости; текущее астрономическое время и дату; номер перегона;
диаметр обода (бандажа) колеса; максимальную позицию тяги;
тип используемого основного и вспомогательного тормоза; режим работы тормоза.
Система УСАВПП по требованию машиниста в звуковом виде выводит следующие сообщения:
Будь бдителен! Впереди красный;
Будь бдителен! Впереди желтый;
Внимание! Следуем по не кодируемому участку; Внимание! Ограничение скорости;
Внимание! Впереди временное ограничение скорости;
Внимание! Впереди остановка по графику; Внимание! Проверка тормозов;
Внимание! Отсутствуют сигналы локомотивного светофора. Перейдите на ручное управление;
Внимание! Неисправность системы. Перейдите на ручное управление;
Внимание! Белый. Полное служебное торможение до остановки;
Внимание! Отказ ЭПТ. Система переходит на пневматическое торможение. Выключи тумблер ЭПТ. Внимание! Не обнаружен картридж. Перейдите на ручное управление;
Внимание! Нейтральная вставка;
__________________
Если не можете скачать файл. / Наше приложение ВКонтакте / Какими программами открывать скачанное? | Распоряжения 1
Унифицированная система автоведения электропоезда
Более 85 % парка электропоездов России и все электропоезда Белоруссии оборудованы сегодня системами автоведения, созданными специалистами Отраслевого центра внедрения новой техники и технологий. На очереди — появление автомашиниста на поездах Казахстана и Украины. Чтобы облегчить локомотивщикам освоение унифицированной системы автоведения электропоездов, публикуем материал об устройстве УСАВП, работе с ней и способах устранения возможных неисправностей.
Система автоведения поезда (УСАВП) представляет собой микропроцессорный комплекс. Его аппаратная часть унифицирована для всех типов моторвагонного подвижного состава. Программное обеспечение (управляющая бортовая программа) реализует энергооптимальное ведение электропоезда В эксплуатации находятся четыре модификации систем автоведения УСАВП: САВПЭ-Я, САВПЭ-ЛМ, САВПЭ-М и САВПЭ-М1.
Система УСАВП состоит из следующих функциональных блоков: центрального процессора, блока коммутации и сопряжения, индикации, клавиатуры датчика пути и скорости, комплекта кабелей. В САВПЭ-Л блоки центрального процессора, индикации и клавиатуры конструктивно выполнены в виде единого блока центрального процессора В САВПЭ-ЛМ блок индикации совмещен с блоком процессора. В системах САВПЭ-М и САВПЭ-М 1 блок коммутации и сопряжения объединен с блоком центрального процессора и конструктивно оформлен как блок автоматики.
Аппаратура УСАВП получает питание от бортовой сети напряжением 50 или 110 В постоянного тока. Максимальная потребляемая мощность не превышает 75 Вт Система питания гальванически развязана от низковольтных цепей управления и сигнализации электропоезда Аппаратура системы УСАВП установлена в головном вагоне и подключена к указанным цепям.
В блоке центрального процессора хранятся управляющая программа автоведения и база данных для участков обслуживания конкретного депо, а также формируются команды управления электропоездом Блок коммутации и сопряжения подключен к цепям управления электропоезда. В режимах тяги и торможения он отрабатывает команды процессора и подает напряжение на соответствующие про вода цепей управления Для этого в блоке имеются выходные реле или транзисторные ключи, которые подключены параллельно контакторам контроллера машиниста КтМ. Логика работы реле и ключей аналогична развертке контроллера машиниста.
При управлении электропневматическим тормозом система автоведения также подает напряжение на соответствующие провода электропоезда — 47 и/или 49. Система автоведения подключена также к низковольтным цепям, которые являются входными для блока коммутации и сопряжения (приемник входных сигналов). Входными сигналами для УСАВП являются: сигналы АЛСН; импульсы датчика пути и скорости; сигналы РН, РБ, СОТ 22Ш и 47
В блоке коммутации и сопряжения входные сигналы гальванически развязываются, приводятся к уровню напряжения 5 В и подаются в центральный процессор, который с дискретностью 1 с проводит перерасчет управляющих воздействий Кроме режимов управления электропоездом система автоведения выдает в кабину и салоны вагонов речевые сообщения Они подразделяются на информацию только для локомотивной бригады (воспроизводятся в кабине машиниста) и сообщения для пассажиров, передаваемые в салонах электропоезда
При выдаче речевых сообщений только в кабину система УСАВП с помощью одного ключа К12 включает усилитель У100. Другой ключ К14 разрывает линию оповещения салонов.
На блоке индикации отображается оперативная информация для машиниста о работе системы автоведения: позиция контроллера, расчетная скорость отключения и подключения тяги, режим работы ЭПТ, время, оставшееся до прибытия на зонную станцию, координата и величина временного ограничения скорости и др. В последней версии программы машинист может установить на блоке индикации значение фактической скорости движения астрономическое время, номер и название перегона, диаметр обода (бандажа) колеса, максимальную позицию разгона поезда, режим работы тормоза.
Блок клавиатуры служит для ввода и корректировки информации о номере поезда, ввода временных ограничений, задания режимов работы системы автоведения и др
В кабине машиниста рядом с пультом расположена панель управления с тумблером включения питания системы УСАВП, тумблером включения выходных цепей и кнопкой «Пуск».
Датчик пути и скорости, устанавливаемый на буксу колесной пары, вырабатывает 42 импульса за один оборот колеса. Он имеет два выхода, и в случае отказа одного канала можно перейти на резервный канал В программе определяются (с учетом диаметра бандажа) фактическая скорость движения и пройденный путь между остановочными пунктами
Управляющая бортовая программа УСАВП обеспечивает
расчет рационального по расходу электроэнергии времени хода поезда по отдельным перегонам, исходя из предусмотренного графика времени проследования контрольных станций;
определение фактической скорости движения, расчет текущего астрономического времени и времени, оставшегося до контрольной станции;
сравнение фактической скорости движения с расчетной и определение необходимой скорости движения поезда для выполнения расчетного времени хода, в том числе на участках приближения к сигналам светофора, требующим снижения скорости при подъезде к местам действий ограничения скорости;
выбор ходовой позиции в зависимости от расчетной величины скорости;
расчет координат пути и местоположения поезда. Она также реагирует на сигналы локомотивного светофора и боксование снижая позицию тяги или отключая тягу и восстанавливая ее после прекращения боксования.
В случае ручного управления система информирует машиниста о следующем:
— рекомендуемых режимах движения;
— расчетном значении энергетически рациональной скорости (расчетной скорости) с точностью ±1 км/ч;
— фактическом значении скорости поезда (±1 км/ч);
— времени хода, оставшегося до контрольной станции (±10 с);
— длине пути до ближайшей платформы с точностью 100 м (1 пикет);
— координате начала ближайшего временного ограничения скорости с точностью индикации 100 м (1 пикет), а при приближении к нему — о длине пути, оставшегося до места начала ограничения;
— тяговой позиции разгона или о состоянии тормоза в режиме торможения
Дополнительно машинист может получить информацию о номере и названии перегона, на котором находится поезд, астрономическом времени с дискретностью 1 с, диаметре обода колеса (бандажа) колесной пары, на которой установлен датчик пути и скорости, координате, на которой находится поезд (км, пикет), максимальной позиции разгона поезда.
УСАВП непрерывно контролирует правильность работы функциональных узлов аппаратуры. В случае выявления нарушений в их работе подает на индикатор сигнал «Сбой». Управляющая бортовая программа загружается с помощью персонального компьютера или специализированного загрузочного модуля.
Переносной пульт САВПЭ-100ПМ служит для оперативной локализации неисправностей в системе на уровне блоков, при которой не требуется демонтировать систему с электропоезда. Он подключается между бортовой аппаратурой электропоезда и аппаратурой системы и позволяет имитировать и контролировать сигналы, поступающие с борта электропоезда, датчика пути и скорости, обеспечивает индикацию сигналов цепей управления, сигнализации электропоезда и команд управления.
Стационарный пульт САВПЭ-100СМ служит для полной функциональной проверки и диагностики системы в условиях депо. Он выполняет следующие функции:
— формирует все необходимые для работы системы УСАВП напряжения;
— имитирует сигналы, поступающие с борта электропоезда, датчика пути и скорости и датчика давления;
— обеспечивает индикацию имитируемых сигналов и выдаваемых системой сигналов
ПОДГОТОВКА УСАВП К РАБОТЕ
После проверки исправности электропоезда и приведения его в состояние готовности для работы при ручном управлении, при отсутствии в журнале технического состояния локомотива записи о неисправности системы УСАВП, машинист приступает к подготовке системы.
Перед включением УСАВП тумблеры системы должны находиться в следующих исходных положениях «Выходные цепи» — в положении «Откл» «Сеть» — в положении «Вкл», тумблеры датчика пути и скорости — в положении «ДПС1» или «ДПС2», «САВПЭ-М» — в положении «Откл».
Для включения системы САВПЭ-М 1 необходимо перевести в положения «Вкл» переключатель S1 кабеля № 6 и тумблер САВПЭ-М, расположенный йа пульте управления системы. При этом должен засветиться индикатор над тумблерами, а на экране блока индикации появиться надпись «Идет загрузка системы».
Затем не позже чем через 18. 25 с на экране блока индикации должна появиться информация о времени, скорости, пути, высветиться значение индикатора ограничения скорости. Сигнализатор «Сбой» светиться не должен. Выполнение этих условий свидетельствует об автоматической установке УСАВП в рабочее состояние.
Если хотя бы одно из них не выполняется, следует повторить запуск, для чего нажать кнопку «Сброс» блока автоматики. Если не удается войти в рабочее состояние после нескольких попыток, то система неисправна и эксплуатации не подлежит. Об этом надо сделать запись в журнале технического состояния локомотива.
После включения система автоматически переходит в режим индикации основной информации. Основной рабочий режим индикации автоматически включается после запуска системы (см рисунок):
В этом режиме УСАВП предоставляет машинисту следующие данные-
— время хода, оставшееся до ближайшей контрольной станции в минутах и секундах. Если время опоздания превышает время хода, оставшееся до зонной станции, то будут выводиться нули («00:00») или «>часа»;
— режим работы системы автоведения. При автоведении поле пусто, если система находится в режиме ожидания команды машиниста (например, после внешнего торможения, не обусловленного системой), то выводится символ «*»;
— состояние тормоза в режиме торможения системой В режиме внешнего торможения, т.е. не обусловленного системой, выводится мигающий символ «Т»;
— фактическую скорость движения;
— о включенной паузе вывода сообщений, направляемых в салон. Если выводится символ «*», то пауза включена, в противном случае она выключена. Состояния паузы изменяют кнопкой с символом рупора (САВПЭ-М), «Тест» (САВПЭ-М1). При наличии в составе системы автоведения коммутатора речи данный индикатор индицирует выдачу сообщения, поступающего только в салон, в виде мигания символа «*» с частотой 0,5 Гц;
— длину пути, оставшегося до ближайшей платформы (метры, пикеты);
— координату места начала действия ближайшего участка с временным ограничением скорости и разрешенную на нем скорость.
В режиме разгона высвечивается расчетная скорость отключения тяги или значение ограничения, если расчетная скорость выше текущего ограничения скорости.
В последнем случае перед значением индикации ограничения появляется символ «*». Если расчетная скорость включения тяги или скорость движения близка к текущему ограничению скорости (до скорости ограничения осталось менее 3 км/ч), выводится значение ограничения. В данном случае перед значением индикации появляется символ «*».

При подготовке к торможению и торможении под ограничение скорости (включая ограничения, связанные с сигналами светофоров) машинисту сообщается значение ограничения скорости. В случае вывода значения ограничения скорости, как и в двух предыдущих случаях, перед значением индикации ограничения выводится символ «*», причем при подготовке к торможению он мигает.
ВВОД ОПЕРАТИВНОЙ МАРШРУТНОЙ ИНФОРМАЦИИ
В режим просмотра, ввода и корректировки информации система входит после нажатия кнопок «F1», «F2» или «Огр» с названием соответствующей информации. Чтобы выйти из режима, нажимают кнопку «F1».
Перед каждой поездкой необходимо ввести или откорректировать исходную информацию об условиях выполнения маршрута:
— текущее астрономическое время
— номер поезда, а если движение поезда начинается не с начальной станции следования, то и номер перегона начала движения;
— координаты мест начала действия временных ограничений скорости и разрешенную на них скорость;
— диаметр обода колеса (бандажа);
— работа с режимом торможения или без торможения,
— максимальная позиция разгона;
— работа с речевыми сообщениями или без них.
Данные о координатах мест начала действия временных ограничений скорости могут вводиться в систему не только перед отправлением, но и во время движения.
Если название вызываемой информации выгравировано над клавишей не в верхней позиции, то следует нажать эту кнопку несколько раз до появления необходимого названия. (Для кнопок «F1» и «F2» названия закольцованы.)
Информацию вводят строго в соответствии с трафаретом, в котором большим символом «X» обозначается обязательная цифра, а маленьким символом «х» — необязательная, например: ХХХх. В данном случае нужно ввести число, которое может состоять из трех или четырех цифр, последнюю цифру можно не набирать. Для ввода километров всегда выдается трафарет ХХХХ. Поэтому для числа, содержащего меньше четырех цифр, необходимо вводить лидирующие нули, например, 0012, что соответствует 12 км.
Ввод данных заканчивается нажатием кнопки «Доп». Ее следует нажимать после ввода всей информации приведенной на экране а не после каждого числа Если не указывая информацию нажать кнопку «Доп», то выходят в меню, из которого был вызван данный пункт. После включения кнопки «Доп» введенная информация проверяется на допустимость.
Если она недопустима, то выдается сообщение об ошибке, которое будет высвечиваться до тех пор, пока не нажмут кнопку «Доп». При попытке ввести информацию, когда это запрещено (например, указать номер поезда не на остановке), также выдается сообщение об ошибке. Чтобы удалить неправильное значение, нажимают кнопку «F2», начиная с последнего набранного символа.
При вводе астрономического времени надо указать четыре цифры в формате и нажать кнопку «Доп». Система не позволяет ввести неправильное время, т е нельзя, например указать в качестве первой цифры часов значение 3. Если набирают меньше четырех цифр, то выдается сообщение об ошибке. Ввод времени разрешен только на остановках.
В случае ввода номера поезда необходимо обязательно ввести четыре цифры и нажать кнопку «Доп». Если он меньше четырех цифр или указанного номера нет в расписании, то выдается сообщение об ошибке. Ввод номера поезда также разрешен только на остановках.
При вводе номера перегона можно набрать одну — три цифры и нажать кнопку «Доп». Если введенного номера перегона нет в расписании для текущего поезда, то выдается сообщение об ошибке Следует отметить что после ввода номера поезда система автоматически устанавливает первый перегон данного поезда текущим Вводят номер перегона только на остановках.
В случае корректировки диаметра колеса (бандажа) следует выбрать соответствующую индикацию кнопкой «F2» и ввести с помощью клавиш «0». «9» необходимый диаметр в миллиметрах (например, 938) для той колесной пары, на которой установлен датчик пути и скорости. По умолчанию устанавливается диаметр 950 мм. Допустимые значения бандажа — 800 .. 999 мм. Ввод его значений возможен не только на остановках, но и при движении в выбеге
При корректировке текущего значения режима нагона (интенсивности тяги при разгоне) надо выбрать индикацию «Тяга» кнопкой «F2» и нажать соответствующую цифровую кнопку (как указано во второй строке экрана) По умолчанию устанавливается нормальный режим нагона (средняя интенсивность тяги). Ввод режима возможен не только на остановках, но и в движении.
Если требуется отключить режим торможения, то кнопкой «F2» выбирают индикацию «Тормоз» и нажимают кнопку «1». Для включения режима управления тормозами необходимо нажать кнопку «2». После выбора нового состояния оно отображается в первой строке экрана По умолчанию торможение включено
В случае корректировки текущего значения максимальной позиции контроллера надо выбрать кнопкой «F2» индикацию «Максимальная позиция» и ввести с клавиатуры одно из значений «0». «4» («0» — маневровая). После выбора новой позиции она отображается в первой строке экрана. По умолчанию устанавливается 4-я позиция.
Если необходимо отключить речевые сообщения, кнопкой «F2» следует выбрать индикацию «Радиовещание» и нажать кнопку «1». Для их включения нажимают кнопку «2» что приведет к включению сокращенного набора функции речи. После выбора нового состояния оно ото бражается в первой строке экрана При первом включении системы радиовещание включено.
В случае ввода и корректировки информации ко ординат места начала действия временных ограничений необходимо нажать кнопку «Огр». На экране по явится меню: «1» — удалить все ограничения, «2» — ввод и редактирование по перегону, «3» — ввод и редактирование по ветке, «4» — направление движения (прямое или обратное). Затем нажимают кнопку «2» или «3». Ввод и редактирование с указанием перегонов должно применяться, когда на одной ветке (маршруте движения) имеются участки с одинаковыми километрами и пикетами
Возможность ввода и редактирования временных ограничений с указанием веток используют в тех случаях, когда километры и пикеты на разных ветках совпадают Для этого указывают координаты начала места действия ограничений (км, пикет), величину разрешенной скорости, например, 0005 км 10 пк 040, 0039 км 02 пк 060 или 1120 км 01 пк 100, и номер перегона или ветки. После нажатия кнопки «Доп» система запомнит данное ограничение.
Для ввода следующего ограничения надо нажать кнопку «Огр» и повторить две предыдущие операции. Чтобы удалить одно временное ограничение, необходимо после появления экрана с нужным ограничением нажать кнопку «F2» и далее следовать подсказке на экране. Временные ограничения скорости вводят не только перед отправлением, но и во время движения
Завершив ввод всей исходной информации, необходимо убедиться в ее правильности, вызвав с помощью кнопок «F1», «F2» и «Огр» последовательно указанные параметры Затем переводят систему в основной режим индикации однократным нажатием кнопки «F1». После выполнения этих действий УСАВП готова к работе.
ВЫБОР РЕЖИМОВ РАБОТЫ
Система УСАВП работает в двух режимах: автоведения и подсказчика. В обоих случаях ее функции одинаковы, за исключением того, что в режиме подсказчика не выдаются команды управления поездом. Нужный режим выбирают тумблером «Выходные цепи»: положение «Вкл» задает режим автоведения, «Выкл» — подсказчика.
Система УСАВП управляет электропоездом при нахождении реверсивной рукоятки контроллера машиниста в положении «Вперед» нажатой кнопке безопасности на рукоятке контроллера машиниста и включенной АЛСН.
При переводе машинистом рукоятки контроллера в тормозное положение (для поездов с ЭДТ) или крана машиниста в одно из тормозных положений, а также в случае срыва стоп-крана, УСАВП отключает автоведение и переходит в режим подсказчика. Возврат в предыдущее состояние возможен по команде машиниста, которая подается нажатием кнопки «Пуск» после полного отпуска тормозов или после перевода рукоятки контроллера машиниста в положение «О».
Для приведения поезда в движение нажимают кнопку «Пуск» на пульте управления или блоке клавиатуры Система автоматически разгоняет поезд до расчетной скорости. Если она больше скорости ограничения, то на блоке индикации перед информацией о скорости высветится символ «*».
Система позволяет задавать скорости перехода на более высокие ходовые позиции реостатного контроллера (РК).
Для этого в главном меню с помощью клавиши «F1» выбирают в опции «Режимы» режим «V контроллера». После появления экрана «V контроллера» в его третьей строке следует установить новые значения скоростей перехода на каждую ходовую позицию В данном случае надо учитывать, что при задании больших значений скоростей перехода на следующую ходовую позицию переключения интенсивность разгона электропоезда снижается.
Кроме того, машинист может ограничить максимальную ходовую позицию, задавая ее с блока клавиатуры. Для этого следует нажать кнопку «F2». После появления на экране индикатора надписи «Макс, позиция» нажатием соответствующей цифровой кнопки выбирают необходимую максимальную позицию разгона.
Движение с постоянной скоростью (по участку ограничения скорости) осуществляется в режиме «пиления» «тяга — выбег — тяга» или «тяга — выбег — торможение — выбег». Если УСАВП выполняет постоянное или временное ограничение скорости, а машинист считает, что ограничение уже закончилось, он может нажать кнопку «Пуск». При этом рассчитывается и начинает выполняться новая скорость разгона.
По окончании действия ограничения система автоматически переходит в режим тяги, если для снижения скорости не применялось торможение поезда. При этом следует иметь в виду: если фактическая длина поезда меньше расчетной, то машинист, нажав кнопку «Пуск», может начать разгон, когда хвост поезда проследовал знак ограничения.
В процессе движения машинист может вводить в память системы новое ограничение скорости. Для этого надо с блока клавиатуры ввести только координату начала места ограничения. Об окончании действия ограничения систему информируют нажатием кнопки «Пуск».
РЕАКЦИЯ СИСТЕМЫ НА СМЕНУ ОГНЕЙ ЛОКОМОТИВНОГО СВЕТОФОРА
При зеленом огне локомотивного светофора система выполняет режим штатного управления поездом. В случае появления белого огня на локомотивном светофоре система УСАВП выдает речевое сообщение: «Внимание! Следуем по некодируемому участку» и продолжает ведение поезда. При этом машинист обязан вести поезд с соблюдением требований Инструкции по движению поездов и маневровой работе и Правил технической зксп луатации железных дорог
При желтом огне локомотивного светофора система работает следующим образом. УСАВП выдает речевое сообщение: «Будь бдителен! Впереди желтый». Если фактическая скорость менее 40 км/ч, данное сообщение не звучит. При скорости более 60 км/ч поезд продолжит движение до начала торможения, определяемого тормозной кривой и расстоянием, оставшимся до светофора.
УСАВП обеспечивает проследование светофора с желтым огнем со скоростью не более 60 км/ч. Если фактическая скорость от 40 до 60 км/ч, то система обеспечивает проследование светофора с желтым огнем в режиме, соответствующем постоянному ограничению скорости движения.
При желтом огне с красным локомотивного светофора система выдает речевое сообщение: «Будь бдителен! Впереди красный». Если этот сигнал появился в тяге, система перейдет в режим выбега. На экране индикатора высветится скорость «0» и перед информацией о скорости появится символ «*». За 1500 м до светофора с красным огнем на индикаторе появится значение скорости «20 км/ч» и символ «*».
Когда траектория движения поезда пересечется с тормозной кривой, система автоведения перейдет в режим торможения. Снижение скорости будет выполнено так, чтобы скорость движения поезда не превысила 20 км/ч не менее чем за 400. 500 м до запрещающего сигнала. В дальнейшем УСАВП остановит поезд за 50. 100 м до светофора с красным огнем.
Если светофор с красным огнем находится непосредственно за платформой, где предусмотрена остановка поезда, то система в процесс остановочного торможения, который выполняет машинист, не вмешивается.
После нажатия машинистом кнопки «Пуск» при появлении желтого огня с красным на локомотивном светофоре, когда электропоезд стоит у платформы, система перейдет в режим подсказки На экране индикатора скорости высветится значение скорости «0» и будет выдано речевое сообщение: «Внимание, впереди красный».
При переключении желтого огня с красным локомотивного светофора на желтый система продолжит ведение поезда со скоростью не свыше 60 км/ч, если до светофора больше 400 м. При обратной смене сигналов движение поезда продолжится с расчетной скоростью (но не выше 50 км/ч) до переключения желтого огня локомотивного светофора на зеленый.
В случаях внезапного переключения огней локомотивного светофора с разрешающего показания на белый, красный огонь или погасания всех огней светофора машинист должен перевести тумблер «Выходные цепи» в положение «Откл» и перейти на ручное управление.
РАБОТА ПРИ БОКСОВАНИИ ПОЕЗДА
Реакция системы на получение сигнала о боксовании колесных пар в поезде зависит от установленной системой позиции разгона, соответствующей позиции контроллера машиниста.
Маневровая позиция — через 5 с после появления сигнала «РБ» происходит сброс тяги и переход на выбег; через 7 с после прекращения боксования автоматически повторно включается тяга.
Первая позиция — через 1. 2 с после получения сигнала «РБ» система переходит на маневровую позицию, которая выдерживается 5 с. Если боксование продолжается, то тяга отключается. Через 7 с после прекращения боксования автоматически включается первая тяговая позиция с дополнительной задержкой на 5 с на маневровой позиции
Вторая — четвертая позиции — через 1.. 2с после получения сигнала «РБ» УСАВП вначале переходит на первую позицию, затем через 1с — на маневровую, которая выдерживается 5 с. Если боксование не прекращается, тяга отключается.
Повторное включение тяговой позиции, на которой произошло отключение, осуществляется через 7 с из режима выбега и через 5 с с низшей позиции, на которой прекратилось боксование. При повторном включении тяги из режима выбега на маневровой и каждой ходовой позициях предусмотрена задержка на 4.. 5 с.
РАБОТА В РЕЖИМЕ ТОРМОЖЕНИЯ ПОЕЗДА
Перед началом торможения система выбирает контрольную тормозную кривую, представляющую собой зависимость скорости движения от расстояния, оставшегося до остановки или места, требующего движения с уменьшенной скоростью.
В зависимости от причины торможения (перед светофором с красным огнем или местом начала действия ограничения скорости) интенсивность контрольной тормозной кривой различна. Если она меньше расчетного значения скорости движения поезда, то ее значение высвечивается на блоке индикации на месте расчетной скорости.
Интенсивность торможения корректируется автоматически. При этом контрольная кривая рассчитывается с меньшим или большим замедлением. В зависимости от сравнения фактической скорости поезда с расчетным значением, задаваемым тормозной кривой, отрабатывается команда на изменение (увеличение или уменьшение) тормозного усилия поезда. Сигналом для использования электрического тормоза является информация о включении машинистом кнопки «Торможение».
Чтобы включить режим подсказчика, следует перевести тумблер «Выходные цепи» в положение «Откл». В этом случае необходимо каждый раз при отправлении электропоезда от платформы нажимать кнопку «Пуск», указывая УСАВП о переходе поезда на следующий перегон
Чтобы завершить работу системы УСАВП, следует установить в отключенное положение тумблер «Выходные цепи» Если в процессе использования системы были замечены сбои или неисправности, машинист должен сделать об этом запись в журнале технического состояния локомотива ТУ-152.
ДЕЙСТВИЯ ПРИ НЕИСПРАВНОСТЯХ СИСТЕМЫ УСАВП
При загорании на блоке индикации светодиода «Сбой» следует повторно запустить систему, нажав кнопку «Сброс» на 3 .. 4 с. Если система не включится после нескольких попыток, ее следует отключить и сделать запись о характере неисправности в журнале ТУ-152.
В случае обнаружения признаков неправильного выполнения системой своих функций в режиме автоведения необходимо перевести тумблер «Выходные цепи» в положение «Откл» (УСАВП перейдет в режим подсказчика) и проверить информацию, выводимую на индикатор. Если она соответствует параметрам движения, допускается дальнейшее использование системы в режиме подсказчика В противном случае систему следует отключить, переведя тумблер «Выходные цепи» САВПЭ-М в положение «Откл» и сделать запись о характере неисправности в журнале ТУ-152.
В случае отказа блока автоматики УСАВП его следует отключить: отсоединить разъем Х1 кабеля 6 от разъема ХЗ «уголка» кабеля 3 и подсоединить его к заглушке Х5 «уголка». Для восстановления цепей управления электропоезда (САВПЭ-М) необходимо установить переключатель S1 в положение «Откл» (САВПЭ-М1) О данных переключениях следует сделать запись в журнале ТУ-152
На поездах разных типов места установки «уголка» с разъемами ХЗ и Х5 и переключателя S1 кабеля 6 различны. Машинист обязан перед началом эксплуатации УСАВП ознакомиться с местом подключения кабелей к бортовой аппаратуре
ВИДЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
Техническое обслуживание УСАВП организовано таким образом, чтобы максимально совместить его с техническим обслуживанием электропоезда (текущим ремонтом). Все работы по техническому обслуживанию и ремонту УСАВП и ее составных частей проводят согласно Правилам по охране труда при техническом обслуживании и текущих ремонтах тягового подвижного состава, Правилам по технике безопасности и производственной санитарии при эксплуатации электровозов, тепловозов и МВПС и Типовой инструкции по охране труда для слесарей по ремонту злектроподвижного состава
Техническое обслуживание ТО-2. Проверяют состояния блоков автоматики, индикации, клавиатуры, закрепление блоков и кабелей. Крепления должны быть надежными, без механических повреждений. На датчике угловых перемещений ДПС контролируют места подсоединения к буксам В случае их ослабления следует подтянуть крепежные болты, убедиться в целостности наружных кабелей, идущих от блока датчика пути и скорости к рейке зажимов, от нее к проходной втулке в полу кабины машиниста
При наличии записей об отказах или неисправностях УСАВП дальнейшее пользование системой не допускается до выявления отказавшего узла или устранения неисправности в условиях депо при плановом ремонте или обслуживании.
Техническое обслуживание ТО-3. Удаляют пыль и загрязнения с составных частей УСАВП. Проверяют состояние блоков автоматики, индикации и клавиатуры, тумблеров, кнопки «Пуск», индикатора включения на панели управления системы и кабелей. Крепления должны быть надежными, без механических повреждений.
На датчике угловых перемещений ДПС проводят следующие профилактические работы:
— контролируют места крепления датчиков к буксам. В случае их ослабления подтягивают крепежные болты;
— проверяют места крепления крышек на блоке датчика пути и коробки зажимов. В случае ослабления подтягивают крепежные болты;
— осматривают контровочную проволоку. В случае ослабления укрепляют проволочный бандаж;
— проверяют целостность наружных кабелей, идущих от датчика пути и скорости к проходной втулке в полу кабины машиниста (для варианта исполнения ДПС-4М — состояние и крепление блока индикации).
После завершения ТО-3 электропоезд приводят в рабочее состояние и проверяют функционирование УСАВП тумблер «Выходные цепи» устанавливают в положение «Откл», тумблер САВПЭ-М — в положение «Вкл». В результате должен загореться индикатор над тумблером САВПЭ-М, а на экране блока индикации появиться надпись: «Идет загрузка системы». Затем на экране должны высветиться числовые значения времени, оставшегося до окончания перегона, и скорости.
Убеждаются в том, что индикаторы «Сбой» и ограничения скорости на передней панели блока индикации не горят. Нажимая кнопки клавиатуры, проверяют их срабатывание по включению соответствующего светодиодного индикатора ограничения скорости на блоке индикации Набрав номер поезда и время его отправления, нажимают кнопку «Пуск». На экране индикатора должна высветиться позиция тяги, и прозвучать речевое сообщение. После окончания проверки выключают систему УСАВП (тумблер САВПЭ-М переводят в положение «Откл»),
При наличии записей о неисправностях системы УСАВП или появлении их в случае проверки следует установить причину неисправности по внешним признакам или провести контроль функционирования системы с помощью переносного пульта САВПЭ-100ПМ в соответствии с Руководством по эксплуатации. При необходимости — заменить неисправные комплектующие изделия
Техническое обслуживание при ТР-1. Следует просмотреть журнал ТУ-152, убедиться, что нет замечаний о работе УСАВП. Затем необходимо проверить состояние контактов у разъемов блоков и кабелей аппаратуры системы, протереть их спиртом. Блоки и кабели с сильно окисленными разъемами (со следами позеленения, шероховатостей или других проявлений коррозии) заменяют новыми. После этого проводят техническое обслуживание системы в объеме ТО-3.
Места, подвергшиеся коррозии, тщательно очищают от ржавчины и покрывают эмалью МЛ-12 ГОСТ 9754—76. При наличии сведений о неисправностях УСАВП или появлении их во время проверки надо установить причины по внешним признакам или провести контроль функционирования системы с помощью переносного пульта САВПЭ-100ПМ. При необходимости заменяют неисправные комплектующие изделия.
Техническое обслуживание при ТР-2. Следует просмотреть журнал ТУ-152, убедиться, что нет замечаний о работе УСАВП. Затем проводят техническое обслуживание в объеме ТР-1. На датчике угловых перемещений ДПС выполняют следующие профилактические работы.
Вариант ДПС-4. Необходимо снять крышку с коробки зажимов и очистить ее от загрязнений и влаги. Снимают датчик с буксы и, не отсоединяя подводящий кабель, подвешивают его на специальный крюк. Убеждаются в отсутствии следующих повреждений: тугого хода или заедания вала при вращении рукой; трещин, изгибов или искривления диска, вала или пальца; люфта в шпоночном соединении. При наличии перечисленных дефектов датчика пути и скорости их следует заменить.
Вариант ДПС-4М Необходимо снять крышку с блока индикации, проверить, нет ли загрязнений и влаги, каково состояние крепления проводов к зажимам.
После выполнения регламентных работ приводят электропоезд в рабочее состояние и проверяют функционирование системы УСАВП Для этого тумблер «Выходные цепи» следует установить в положение «Откл», а тумблер САВПЭ-М — в положение «Вкл». В результате должен загореться индикатор над тумблером САВПЭ-М, а на экране появиться числовые значения времени, оставшегося до окончания перегона, и скорости.
Убеждаются в том, что индикаторы «Сбой» и ограничения на передней панели блока индикации не светятся. Вращая диск датчика пути и скорости, контролируют изменение величины скорости на экране индикатора. Затем переключают тумблер датчика пути и скорости блока автоматики во второе положение и повторяют предыдущую операцию
После окончания проверки систему УСАВП выключают и устанавливают датчик на буксу, закрепляют крышку коробки зажимов. В соответствии с руководством по эксплуатации проверяют работу системы с помощью переносного пульта САВПЭ-100ПМ В случаях выявления неисправных блоков их заменяют исправными
Техническое обслуживание при ТР-3. Демонтируют блоки автоматики, индикации, клавиатуры, датчик пути и скорости. Проводят полную проверку функционирования системы УСАВП с помощью пульта САВПЭ-100ПМ в соответствии с руководством по эксплуатации.
Затем надо снять панель управления системы и кожухи с панели. Тумблеры, кнопку «Пуск», индикатор включения системы, подходящие к ним провода осмотреть, очистить от пыли и загрязнений. Убедившись в их исправности, кожухи и панель устанавливают на место Контролируют состояние и места крепления кабелей, разъемов и проводов с наконечниками.
Контакты разъемов следует протереть, нарушенную маркировку и изоляцию восстановить. Кабели с сильно окисленными разъемами (со следами позеленения, шероховатости или других проявлений коррозии) заменяют Коробку зажимов очищают от влаги и загрязнений Осматривают места крепления коробки к тележке. Проверяют состояние проводов на зажимах, при необходимости их закрепляют. Контролируют состояние деталей и наконечников, негодные элементы заменяют.
После проделанного устанавливают снятое оборудование на электропоезд и проверяют функционирование системы с помощью переносного пульта САВПЭ-100ПМ в соответствии с руководством по эксплуатации.
А.Л. ДОНСКОЙ, С.В. СВЕРГУН, Х.Ю. БУТКЕВИЧ, ЗАО «Отраслевой центр внедрения новой техники и технологий» Н.Б. НИКИФОРОВА, Ю.В. БУШНЕНКО, ВНИИЖТ
__________________
Если не можете скачать файл. / Наше приложение ВКонтакте / Какими программами открывать скачанное? | Распоряжения 1
УСАВП ЭП1
Универсальная система автоведения электровозов пассажирского движения предназначена для автоматизированного управления электровозами серии ЭП1. Система обеспечивает автоматизированное управление тягой и рекуперативным тормозом через МСУД и всеми видами тормозов поезда непосредственно, с целью точного соблюдения времени хода, задаваемого графиком движения или другими нормативными документами, на основе выбора энергетически рационального режима движения. Она также предназначена для выдачи локомотивной бригаде предупреждающей звуковой (речевой) и вспомогательной визуальной информации.
Система включает в себя три подсистемы:
- подсистема управления тягой и рекуперативным тормозом;
- подсистема регистратора параметров движения и автоведения;
- подсистема управления пневматическими и электропневматическими тормозами.
Регистратор параметров движения и автоведения предназначен для записи на сменном картридже затраченной энергии, мгновенных значений токов, напряжений, показания огней локомотивного светофора и другой информации, поступающей от системы автоведения, цепей управления электровоза, электропневматического и пневматического тормозов.
Электромагнитные клапаны и электропневматические приставки предназначены для дистанционного автоматизированного управления электропневматическими и пневматическими тормозами поезда и образуют тормозную подсистему. Датчики давления (ДД) предназначены для измерения и передачи в систему текущих значений давлений в уравнительных резервуарах (УР), питательной магистрали (ПМ) и в тормозных цилиндрах поезда (ЗТС). Бортовая управляющая программа предназначена для реализации алгоритма автоведения, ввода необходимой для автоведения информации, организации взаимодействия с машинистом, сбора и передачи записываемой на картридж информации, а также для связи приборами безопасности и МСУД.
Технические характеристики системы
Система УСАВП-ЭП1 соответствует требованиям комплекта конструкторской документации АЮВП.468382.010, согласованной и утвержденной в установленном порядке. Пример записи системы УСАВП-ЭП1 в документации другого изделия: Система УСАВП-ЭП1 — 00 АЮВП.468382.010.
По устойчивости при климатических воздействиях система УСАВП-ЭП1 должна соответствовать климатическому исполнению У категории 2 по ГОСТ 15150, но при этом:
- нижнее значение рабочей и предельной температуры – минус 50 °С;
- верхнее значение рабочей температуры – плюс 60 °С;
- верхнее значение относительной влажности воздуха 98% при температуре плюс 25°С.
По устойчивости к воздействию механических факторов система относится к классу ММ1 по ОСТ 32.146.
Питание системы осуществляется напряжением постоянного тока с параметрами:
- номинальное значение 50В;
- отклонение от номинального значения в диапазоне от 35 до 65В.
Суммарная мощность, потребляемая системой не превышает 100 Вт. Суммарная масса изделия, устанавливаемого на электровоз, не более 50 кг.
Состав системы
В состав системы УСАВП-ЭП1 входят конструктивно законченные составные части
Блок управления
- Блок дискретного управления БДУ-27-ДЛИЖ.468364.0072 ТУ
- Блок дискретного управления БДУ-28-ДЛИЖ.468364.0072 ТУ
Блок ввода, вывода и обработки информации
- КНГМ.402152.002 Изделие УККНП — Блок системный БС-1
- ДЛИЖ.466451.0010 ТУ — Блок центрального процессора БЦП-3
- ДЛИЖ.466451.0014 ТУ — Блок ШК Шлюз CAN-RS232
- ТЯБК.469136.149 — Звуковая колонка ЗК-1-4
- ДЛИЖ.467285.0003 ТУ — Плата CAN104D
Плата ТД ТЯБК.469155.146
Блок измерения
Блок аналогового ввода БАВ-9 — ДЛИЖ.468154.0004 ТУ Счетчик активной и реактивной — электрической энергии переменного тока, статический, однофазный, многофункциональный СЭТ-1М.01.04 трансформаторного включения ИЛГШ.411152.127 ТУ
Счетчик электрической энергии многофункциональный СЭТ-1М.01М.05 ИЛГШ.411152.160 ТУ
Блок регистрации
- Блок регистрации БР-2 ДЛИЖ.467669.0009 ТУ
- Блок накопления информации БНИ-9 ДЛИЖ.467669.0014
- RP-110 (Держатель БНИ-8) ДЛИЖ.301535.0004
- АЮВП.667759.010 по 04 Комплект тормозного оборудования
- АЮВП.685695.010 по 09 Комплект кабелей № 1 Кузовные кабели
- АЮВП.685695.032 по 02 Комплект кабелей № 2 Кабинные кабели
- АЮВП.468931.010 по 27 Комплект монтажных частей
Эксплуатационная документация
- АЮВП.468382.010 ПС Паспорт
- АЮВП.468382.010 по 07 ВЭ Ведомость эксплуатационных документов Один комплект ВЭ в одни адрес
1. Приведен перечень изделий, которые могут входить в систему УСАВП-ЭП1. Точный состав и количество входящих изделий определяются исполнениями системы УСАВП-ЭП1 и должны указываться в спецификации АЮВП.468382.010.
2. АРМ пассажирского электровоза, комплект обучающего тренажера, комплект стендового оборудования для диагностики и ремонта внедряется и настраивается в депо, в количестве согласно договору с заказчиком.
3. Комплект оборудования переходной АЮВП.468933.001 поставляется отдельно, согласно договору с заказчиком.
Устройство и работа
Система автоведения представляет собой автоматизированную управляющую программно-аппаратную систему реального времени, осуществляющую расчет энергетически рационального режима движения и обеспечивающую управление режимами тяги и торможения. Аппаратура системы по CAN-интерфейсу подключается к МСУД, а к цепям управления и к пневматическому оборудованию электровоза непосредственно. На основании хранимой в памяти информации и с учетом входных сигналов, принимаемых от аппаратуры электровоза, приборов безопасности и от преобразователей давлений, система производит расчет энергетически рациональных режимов движения и осуществляет автоматизированное ведение поезда.
Функциональные возможности системы
На основании информации об участке обслуживания и принятой с борта электровоза система обеспечивает:
- расчет рационального по расходу электроэнергии режима ведения поезда, исходя из предусмотренного графиком движения и заданного машинистом режима исполнения
- прием фактической скорости движения;
- прием сигналов АЛСН от КЛУБ-У;
- расчет времени, оставшегося до контрольной станции;
- определение необходимой скорости движения поезда для выполнения расчетного времени хода, в том числе на участках приближения к сигналам светофора, требующих снижения скорости и при подъезде к местам ограничения скорости;
- расчет координаты местоположения поезда.
На основании информации об участке обслуживания и проводимых измерений и расчетов система:
а) записывает на сменный картридж параметры движения и управления, как при автоматизированном, так и при ручном режимах управления электровозом;
б) управляет электровозом, оставляя приоритет управления за машинистом, при этом система:
1) разгоняет поезд до расчетной скорости (энергетически рациональной);
2) при запрещающих показаниях локомотивного светофора, показаниях сигналов уменьшения скорости и при проследовании других мест, требующих снижения скорости, применяя служебное торможение, останавливает поезд, не проезжая запрещающий сигнал, а сигнал или место требующие проследования с уменьшенной скоростью, проследует со скоростью установленной для данного места или сигнала;
3) в случае ручного управления информирует машиниста о рекомендуемых,энергооптимальных режимах движения.
В любом режиме работы постоянно информирует машиниста:
- о расчетном значении энергетически рациональной скорости (расчетной скорости) с точностью ± 1км/ч;
- о фактическом значении скорости поезда, с точностью ±1 км/ч;
- о времени хода, оставшемся до контрольной станции, с точностью ±10 с;
- об оставшемся расстоянии до контрольной станции, с точностью 1 пикет;
- о значении скорости и координате начала ближайшего временного ограничения скорости, а после въезда на место ограничения – о длине пути, оставшемся до конца его действия, с учётом длины поезда.
Система выдает машинисту следующие сообщения в звуковом виде:
- Впереди красный;
- Впереди желтый;
- Следуем по не кодируемому участку;
- Ограничение скорости;
- Впереди временное ограничение скорости;
- Впереди остановка по графику;
- Проверка тормозов;
- Неисправность системы. Перейдите на ручное управление;
- Отказ ЭПТ. Система переходит на пневматическое торможение;
- Не обнаружен картридж. Перейдите на ручное управление;
- Нейтральная вставка;
- Переезд;
- Проверка тормозов;
- УКСПС;
- Диск.
При необходимости машинист может изменить следующие введенные параметры:
- табельный номер;
- количество вагонов в составе поезда;
- оперативное ограничение скорости;
- место (координаты начала и конца) и величину временного ограничения скорости;
- номер перегона;
- тип используемого основного и вспомогательного тормозов;
- режим работы и параметры основного тормоза;
- режим исполнения расписания.
Система непрерывно контролирует правильность работы функциональных узлов аппаратуры, осуществляя при этом функцию самодиагностирования. Бортовая микропроцессорная система УСАВП-ЭП1 имеет три канала обмена информацией, один используется для связи с приборами безопасности (интерфейс CAN), второй для связи с МСУД и блоками КАУД, третий канал RS232 для загрузки ПО.
Средства измерения, инструмент и принадлежности
Персональный компьютер
Персональный компьютер необходим для:
- переналадки системы, когда локомотив передается на другой участок обслуживания, при смене расписания и изменениях параметров основных объектов на участке обслуживания;
- функциональной диагностики системы при ремонте в условиях депо и производства.
Стенд ЧС –100С
Стенд ЧС-100С СВТИ.468222.021 совместно с персональным компьютером используется для проверки системы после изготовления и при обслуживании в условиях депо.
Стенд ЧС-100С выполняет следующие функции:
- вырабатывает все необходимые для работы системы напряжения;
- имитирует сигналы, поступающие с борта электровоза;
- имитирует сигналы преобразователей давления (ДД);
- обеспечивает индикацию всех имитируемых сигналов;
- обеспечивает индикацию всех выдаваемых проверяемой системой сигналов;
- обеспечивает проверку блоков и устройств, входящих в состав системы.
Стенд ЧС-100С питается от сети переменного напряжения 220В 50Гц и подключается к системе с помощью входящих в его комплект кабелей. Порядок работы со стендом ЧС-100С описан в его руководстве по эксплуатации СВТИ.468222.021РЭ.
Маркировка
Составные части системы УСАВП-ЭП1 должны иметь заводские таблички по ГОСТ 12969, содержащие следующие данные:
- сокращенное наименование;
- товарный знак завода-изготовителя;
- порядковый номер, присвоенный ему при изготовлении;
- степень защиты по ГОСТ 14254;
- год выпуска.
Маркировка должна содержать единый знак обращения продукции на рынке государств – членов Таможенного союза в соответствии с положением о едином знакеобращения продукции на рынке государств – членов Таможенного союза, утвержденным Решением Комиссии Таможенного союза от 15 июля 2011 № 711.
Маркировка системы отсутствует
Маркировка транспортной тары должна содержать манипуляционные знаки № 1, 3, 11, основные, дополнительные и информационные надписи по ГОСТ 14192.
Упаковка
Упаковка и транспортная тара системы УСАВП-ЭП1, содержание и качество товаросопроводительных документов должны быть выполнены с учетом следующих требований:
- блоки БЦП, БС, БАВ, СЭТ, БДУ, БР должны быть подвергнуты упаковке в ящики из гофрокартона по ГОСТ 9142;
- КЭО 15, КЭО 03 должны быть помещены в полиэтиленовые пакеты по ГОСТ 12302 и ящик из гофрокартона по ГОСТ 9142 или деревянные ящики по ГОСТ 9396.
Упаковка данных составных частей осуществляется без консервации по ГОСТ 9.014;
- эксплуатационная и товаросопроводительная документация должны быть упакованы в пакеты из пленки полиэтиленовой ГОСТ 10354 или в конверты из водонепроницаемой бумаги ГОСТ 8828, соответственно заваренные или заклеенные;
- исполнение тары должно быть по ГОСТ 23216: вариант исполнения ТЭ-2 либо ТФ3, исполнение по прочности С. Тип тары, количество единиц тары, размеры и массу тары брутто устанавливает завод-изготовитель в зависимости от номенклатуры составных частей в каждой единице тары;
- если в один адрес поставляется несколько комплектов системы, допускается упаковывать составные части разных комплектов в одни и те же единицы тары;
- на общее количество единиц тары должна быть составлена ведомость упаковки, в которой должно быть указано, какие составные части в какие единицы тары уложены.
Ведомость упаковки укладывают вместе с остальной документацией. Единице тары с документацией присваивают №1;
- тара по торцам должна быть обита стальной упаковочной лентой (ГОСТ 3560) или полипропиленовой упаковочной лентой, принята ОТК и опломбирована.
Примечание – Допускается производить упаковку по документации завода изготовителя, разработанной в соответствии с требованиями действующих стандартов на упаковку и обеспечивающей сохранность системы УСАВП-ЭП1 в условиях транспортирования и хранения, установленных в разделе “Транспортирование и хранение”.
Описание и работа составных частей изделия
Системный блок (блок БС-1) предназначен для формирования стабилизированного напряжения питания (системное питание) и для выполнения алгоритмов управления электровозом.
Блок системный имеет постоянную память, в которую заносят следующую информацию об участке обслуживания:
- профиль пути;
- постоянные ограничения скорости;
- расположение путевых объектов;
- расположение объектов сигнализации;
- расписание движения.
Данная информация постоянна и не может быть изменена без переналадки системы. Часть памяти блока БС-1 зарезервирована для хранения переменной (изменяемой) информации: номер поезда, количество вагонов, мест временных ограничений скорости и т.п. Эта информация при необходимости может быть оперативно изменена машинистом при эксплуатации системы.
Блок аналогового ввода (блок БАВ-9) предназначен для измерения и передачи системному блоку по CAN шине давлений в пневматических цепях электровоза. Блок БАВ-9 осуществляет также подсчет количества импульсов с датчика пути и скорости. Блоки дискретного управления (БДУ-27 и БДУ-28) предназначены для определения дискретного состояния входных электрических сигналов, поступающих с борта электровоза и передачу этих состояний блоку БС-1. Блоки БДУ-27 и БДУ-28 предназначены также для дистанционного управления пневматическими и электропневматическими тормозами поезда. Блок регистрации (блок БР-2) предназначен для записи, чтения и отображения информации поступающей от остальных блоков системы автоведения, МСУД, КЛУБ-У, САУТ-ЦМ/485 и т.д.. Запись информации производится на сменный картридж БНИ-9, который устанавливается в держатель картриджа.
На сменный картридж БНИ-9 происходит запись информации из блока БР-2. Память картриджа имеет объем около 64 мегабайт, данного объема памяти хватит для записи поездки на плече около 5000 км. Счетчики активной и реактивной электрической энергии прямого и обратного направления, предназначены для учета электроэнергии затраченной на тягу и отопление поезда, а также для учета энергии возвращенной в контактную сеть при рекуперации. Счетчики способны выдавать информацию о напряжении и токе в первичной обмотки трансформатора, коэффициенте мощности, частоте тока и т.д. Счетчики имеют цифровой интерфейс CAN, для связи с остальными блоками системы автоведения.
Использование системы по назначению
Несоблюдение следующих требований недопустимо по условиям безопасности и может привести к выходу изделия из строя.
При монтаже системы необходимо соблюдать следующие требования:
- блоки и устройства подключения, установленные на электровозе должны быть надёжно закреплены;
- все соединители должны иметь надёжное соединение с ответной частью разъёмов кабелей;
- неиспользуемые соединители (не подсоединенные разъёмы) на блоках и кабелях должны быть закрыты защитными крышками (заглушками);
- не подключённые (резервные) провода должны быть заизолированы.
Питание аппаратуры должно осуществляется от источника питания локомотивного ИП-ЛЭ-50/800, системы САУТ-ЦМ/485. Напряжение питания аппаратуры системы должно находиться в диапазоне от 35В до 65В постоянного тока. При выходе напряжения питания за указанные пределы следует отключить блок БС-1 от питания.
Подготовка изделия к использованию
Подготовка системы к использованию состоит из двух отдельных этапов:
- первичная подготовка системы;
- текущая подготовка системы.
Первичная подготовка системы
Первичная подготовка системы осуществляется при вводе в эксплуатацию системы или при переводе оборудованного электровоза на обслуживание другого участка обращения. Наладка и переналадка системы требуют специальных знаний и могут осуществляться только специалистами фирмы-изготовителя или персоналом, прошедшим специальный курс обучения и имеющим соответствующий документ на право проведения пуско-наладочных работ.
Первичная подготовка системы предполагает выполнение следующих действий:
- загрузка программного обеспечения и бортовой базы данных по плечам обслуживания;
- выполнение настройки параметров локомотива с помощью специальной программы, входящей в состав программного обеспечения системы. Загрузка (обновление) управляющей программы и бортовой базы данных в систему осуществляется с помощью специальной программы Inflow Communicator. Inflow. Communicator является 32-разрядным Windows-приложением и работает в ОС Windows 9x, NT, Me, 2000, XP. Программа должна быть установлена на рабочий компьютер с дистрибутива. Загрузка возможна как в стационарных условиях, с использованием настольного компьютера, так и на локомотиве с использованием переносного компьютера типа Notebook.
Программа Inflow Communicator позволяет экспортировать из ПЭВМ в систему как отдельно архивные файлы управляющей программы с БД и звукового сопровождения, так и все файлы одновременно. Повторная загрузка может быть осуществлена из блока накопления информации (картриджа) автоматически. Предварительно на картридж должны быть записаны программное обеспечение и база данных для соответствующего депо, а также электронный маршрут машиниста (ЭММ). Работа с автоматизированным рабочим местом подготовки данных (АРМом) для ЭММ подробно описана в руководстве оператора АРМа КНГМ.00007-01 34-01.
Для загрузки программного обеспечения необходимо:
- подключить соединитель Х1 кабеля связи RС-СОМ к соединителю Х8 блока БС-1, соединитель Х2 кабеля связи – к COM-порту ПК. Подключение кабеля связи RC-СОМ производить только при отключенном питании компьютера или системы автоведения;
- включить ПК и запустить программу InfLow Communicator. Вид окна программы на экране компьютера или ноутбука показан на рисунке 2;
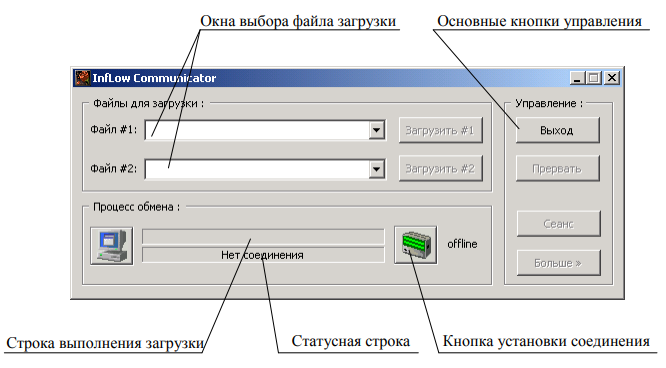
Рисунок 2 – Интерфейс программы Inflow Communicator
- установить соединение ПК с блоком БС-1 системы УСАВП-ЭП1, для этого нажать кратковременно (щелкнуть) по кнопке «Offline», окно программы должно измениться в соответствии с рисунком 3;
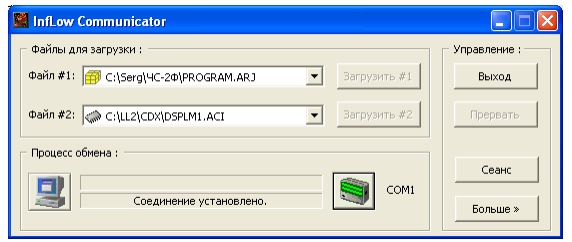
Рисунок 3 – Установка соединения
- нажать кнопку сеанс, для начала работы с файлами загрузки, окно программы Inflow Communicator, должно принять вид в соответствии с рисунком 4;
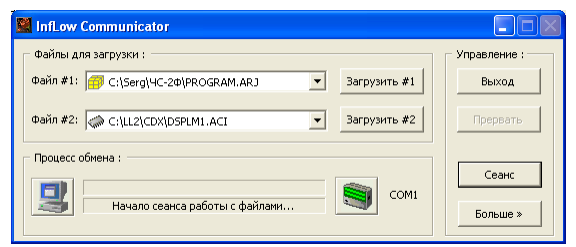
Рисунок 4 – Начало сеанса работы с файлами
- для выбора файла загрузки нажать кнопку «▼» справа от «Окна выбора файла загрузки». В появившемся списке выбрать нужный файл или щелкнуть левой кнопкой мыши на строке «Открыть другой файл»;
- после выбора файла загрузки нажать кнопку «Загрузить #1» или «Загрузить #2» (в зависимости от того, из какого окна выбора необходимо загрузить файл) окно программы должно принять вид в соответствии с рисунком 5;
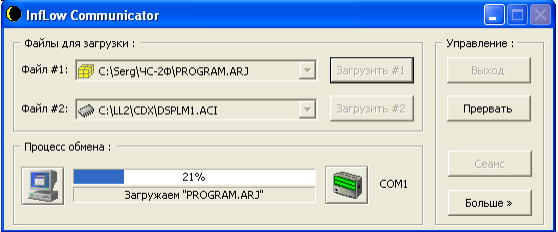
Рисунок 5 – Загрузка файла «PROGRAM.ARJ»
- дождаться появления в статусной строке окна программы Inflow Communicator надписи «Загрузка завершена»;
- в выделенной части окна с заголовком «Управление:» нажать на кнопку «Сеанс»;
- при появлении диалогового окна выбрать альтернативу «Выполнить прикладную программу» и нажать в этом окне кнопку «Ok»;
- нажать кнопку «Выход» в окне программы Inflow Communicator;
- выключить питание системы автоведения или ПК, и отсоединить загрузочный кабель.
Настройка параметров аппаратуры системы производится однократно с помощью специальной программы, запускаемой из программы автоведения в следующих случаях:
- при замене блока БС-1;
- при замене датчика (датчиков) давления.
Программа определяет некоторые эмпирические коэффициенты и записывает их в энергонезависимое ОЗУ блока БС. Программа автоведения при запуске считывает эту информацию и использует при работе. Таким образом, для обеспечения достоверности данных необходима жесткая привязка блока БС к конкретным локомотивам.
Текущая версия программы определяет:
- пороговое напряжение для двух датчиков давления УР;
- коэффициент наклона функции P(U) для датчика давления ЗТС.
Подробно работа с программой настройки описана в Приложении А.
Текущая подготовка системы
Текущая подготовка системы к работе производится машинистом после проверки исправности электровоза и приведения его в состояние готовности для работы при ручном управлении. Перед началом подготовки системы к работе следует убедиться в отсутствии замечаний в работе системы, по записям в журнале технического состояния локомотива
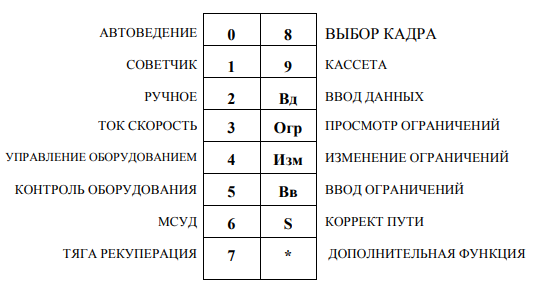
Рисунок 6 – Клавиатура блока индикации МСУД-1
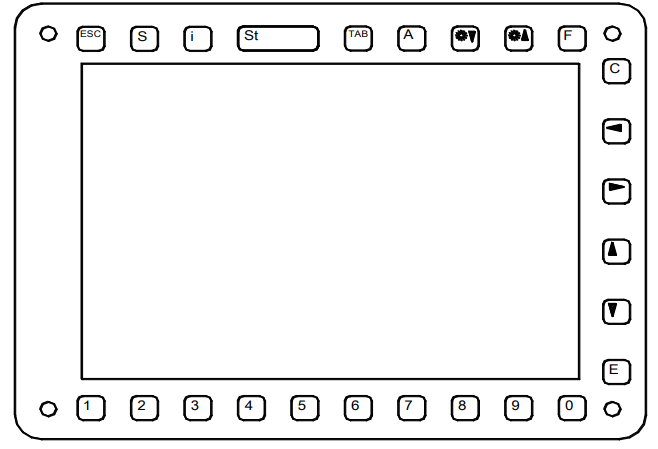
Рисунок 7 – Блок индикации МСУД-Н
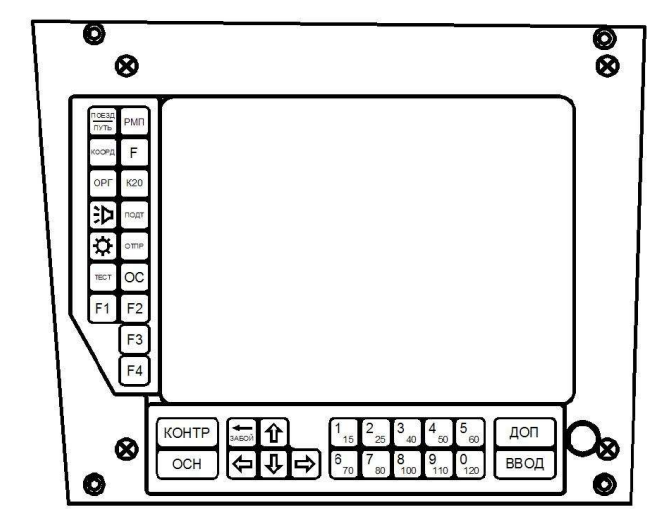
Рисунок 8 – Блок индикации пульта УНИКАМ
При описании клавиш клавиатуры блока индикации БИ-1.2 (МСУД-1) «*» перед названием клавиши означает, что данная функция реализуется в дополнительном режиме работы клавиатуры (например «*Огр»). Отсутствие «*» перед названием клавиши означает, что данная функция возможна в основном режиме работы клавиатуры (например «Вд»). Переход из одного режима работы клавиатуры в другой осуществляется нажатием на клавишу «*» (ДОПОЛНИТЕЛЬНАЯ ФУНКЦИЯ).
Включение системы
Для включения системы УСАВП-ЭП1 необходимо выполнить следующие операции:
- установить картридж в гнездо держателя картриджа в рабочей кабине электровоза;
- привести электровоз в рабочее состояние, согласно заводскому «Руководству по эксплуатации электровоза ЭП1», зарядить питательную и тормозную магистрали сжатым воздухом;
- привести систему УСАВП-ЭП1 в рабочее состояние включением АЗВ «SF98» для электровозов ЭП1 и ЭП1М или «SF81» * для электровозов с пультом УНИКАМ;
- для входа в основной экран системы УСАВП-ЭП1 необходимо нажать клавишу «0» на клавиатуре блока индикации МСУД (из основного экрана МСУД) для электровозов ЭП1 и ЭП1М или F2 для электровозов с пультом УНИКАМ. На блоке индикации должен появиться дополнительный кадр ввода табельного номера машиниста, представленный на рисунке 9.

Рисунок 9 – Экран ввода табельного номера
Ввод табельного номера является обязательным, введенное значение регистрируется на картридже. Табельный номер может состоять из трех или четырех цифр. Удаление неверно введенной цифры осуществляется нажатием клавиши («Огр»), («◄»), («←») клавиатуры. Завершение ввода табельного номера осуществляется нажатием клавиши («Вд»), («▼»), («↓» или «ВВОД»). Другие функциональные клавиши клавиатуры в данном экране не действуют. При вводе табельного номера, состоящего менее чем трех цифр, выдается сообщение об ошибке: * «недопустимое значение». Если табельный номер машиниста считан из картриджа БНИ-9, содержащего электронный маршрут машиниста с ненулевым табельным номером, то при включении системы автоведения этот экран не появляется. После включения системы и ввода табельного номера система входит в режим «Маневровый 1». В этом режиме система автоведения считает, что электровоз находится в режиме маневровых работ. При этом автоведение поезда не осуществляется. По прибытии электровоза на конечную станцию для данного участка обращения, система автоведения автоматически переходит в режим маневровых работ с соответствующей индикацией. Выход из режима маневровых работ производится после ввода номера поезда и первого нажатия клавиши («*Вд»), («St»), («отпр»). Для многомаршрутных участков движения (разбиение участков движения на маршруты осуществляется для депо, обслуживающих разные направления с одинаковыми номерами поездов) в данном экране производиться указание маршрута нажатием на клавишу («Изм»), («►»), («→») причем список маршрутов закольцован.
Режимы индикации информации и их выбор
Основной экран системы УСАВП-ЭП1 для электровозов ЭП1 и ЭП1М представлен на рисунке 10, а для пульта УНИКАМ на рисунке 11.
1 — Текущее астрономическое время в формате ЧЧ:ММ:СС, где ЧЧ – часы, ММ – минуты, СС – секунды.
2 — Фактическая скорость поезда в км/ч.
3 — Время прибытия на станцию исполнения расписания в формате ЧЧ:ММ.
4 — Название станции исполнения расписания.
5 — Оставшееся время хода до этой станции в формате ЧЧ:ММ:СС.
6 — Отклонение от графика движения в минутах:
- если отклонения от расписания нет, то выводится зеленым цветом надпись «следует графиком»;
- если имеет место опережение графика, то выводится светло-зеленым цветом надпись «опережение» и белым цветом значение опережения в минутах;
- если имеет место опоздание от графика, то выводится красным цветом надпись «опоздание» и белым цветом значение опоздания в минутах.
7 — Время прибытия на ближайшую зонную станцию по расписанию в формате ЧЧ:ММ.
8 — Название ближайшей зонной станции.
9 — Оставшееся время хода до этой станции в формате ЧЧ:ММ:СС.
10 — Расчетная (рекомендуемая) скорость для поезда в км/ч.
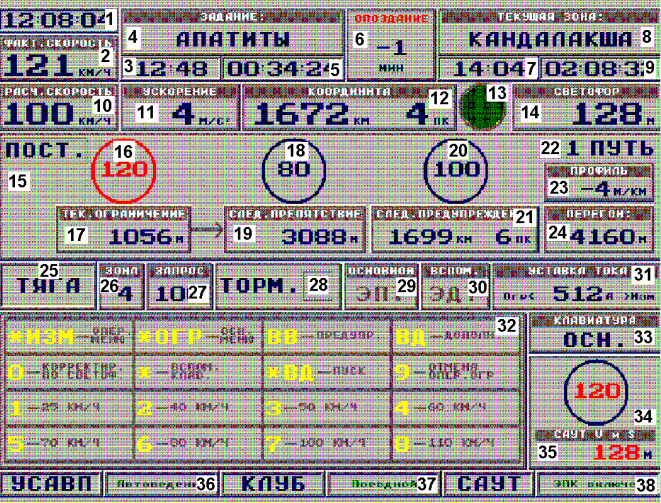
Рисунок 10 – Основной экран системы УСАВП-ЭП1 для электровозов ЭП1 и ЭП1М
11 — Ускорение в м/с². Если ускорение положительное (разгон), то его значение выводится без знака, если отрицательное (торможение) — то со знаком минус, а если ускорение нулевое – то светло серым цветом.
12 — Текущая железнодорожная координата в км и пикетах.
13 — Сигнал светофора. Сигнал светофора выводится соответствующим цветом. Если сигнал светофора отсутствует, цвет сигнала – черный.
14 — Расстояние до ближайшего светофора в метрах.
15 — Тип текущего ограничения скорости (маленький прямоугольник в левом верхнем углу области 3 с текстом). В зависимости от типа ограничения выводится следующий текст: «пост» — постоянное ограничение; «пред» * предупреждение; «опер» — оперативное ограничение скорости, заданное машинистом; «саут» — ограничение скорости, принятое от САУТ-ЦМ; «клуб» * ограничение скорости, принятое от КЛУБ-У.
16 — Текущее ограничение скорости в км/ч (в кругу):
- если текущая скорость ниже значения ограничения более чем на 2 км/ч, то значение ограничения и обрамляющая его окружность имеют белый цвет;
- если текущая скорость ниже значения ограничения менее чем на 2 км/ч, то значение ограничения и обрамляющая его окружность имеют желтый цвет;
- если текущая скорость превышает значение ограничения, то значение ограничения и обрамляющая его окружность имеют красный цвет.
17 — Расстояние до конца текущего ограничения скорости в метрах (в прямоугольнике под кругом).
18 — Значение ограничения скорости следующего препятствия в км/ч, требующего снижения текущей скорости (в кругу).
19 — Расстояние до этого препятствия в м (в прямоугольнике под кругом).
20 — Значение ограничения скорости ближайшего (следующего) временного ограничения скорости в км/ч (в кругу).
21 — Координата начала ближайшего предупреждения в километрах и пикетах.
22 — Номер пути (выводится только для многопутных баз данных).
23 — Текущее значение профиля в м/км. Положительное значение соответствует подъему, а отрицательное – спуску.
24 — Расстояние до конца текущего перегона в метрах. Поле «тяга».
25 — Режим движения поезда: «выбег» — выводится черным цветом; «тяга» — выводится зеленым цветом; «торм» — рекуперативное торможение — выводится зеленым цветом.
26 — Текущая (реально установленная) зона.
27 — Запрашиваемое значение скорости у МСУД.
28 — Состояние основного тормоза. Выводится в виде букв светло-красного цвета:
- «Т» — торможение;
- «О» — отпуск;
- «П» — перекрыша;
- пустое поле соответствует поездному положению. 29 — Тип основного тормоза, заданный для системы автоведения. Возможны следующие варианты (жирным указан выводимый в этом поле текст):
- ЭПТ;
- ПТ;
- ПТке (ПТКЕС).
Если тип основного тормоза не задан и торможение должен осуществлять машинист, то в этом поле ничего не выводится. 30 — Тип вспомогательного тормоза, заданный для системы автоведения. Возможно использование рекуперативного тормоза (выводится слово «ЭДТ»). Если использование вспомогательного тормоза не предполагается, то в этом поле ничего не выводится. Если электровоз находится в режиме «торможение», то имя используемого тормоза выводится желтым цветом, в противном случае имя основного и/или вспомогательного тормоза выводится светло-серым цветом. Если режим торможения в системе автоведения отключен или торможение основным тормозом по тем или иным причинам с точки зрения системы автоведения невозможно, то надпись «тормоз» выводится темно-серым цветом. В этом случае вместо типов тормозов выводится слово «выключен». Если торможение включено, и система автоведения может использовать заданный тормоз, то надпись «тормоз» выводится желтым цветом. При подготовке системы автоведения к торможению под ограничение скорости сверху, цвет надписи меняется с желтого на чередующиеся голубой и светло-зеленый цвета.
Поле «уставка тока».
31 — Уставка тока в амперах. Увеличение и уменьшение уставки тока производится в диапазоне от 200 А до 1400 А с шагом в 100 А с помощью клавиш («Изм»), («►»), («→») и («Огр»), («◄»), («←») соответственно.
32 – Подсказка машинисту о назначении клавиш. При входе в любое меню подсказка выбирается и появляется дополнительный кадр УСАВП-ЭП1 для ввода настроечной информации.
33 — Режим работы клавиатуры УСАВП-ЭП1. Дополнительный режим работы клавиатуры обозначается «доп» и выводится желтыми буквами на черном фоне. Основной режим работы клавиатуры обозначается «осн» и выводится зелеными буквами на черном фоне.
34 — Значение допустимой скорости САУТ в км/ч (в кругу).
35 — Значение расстояния до цели САУТ в м (в прямоугольнике под кругом).
36 — Состояние (режим работы) УСАВП-ЭП1. Возможны следующие режимы работы системы автоведения:
- «маневровый 1» (надпись выводится красным цветом). В этом режиме система не производит управления тягой и не производит управления торможением. Система находится в режиме «маневровый 1» после включения системы автоведения до ввода табельного номера. Система также переходит в режим маневровый 1 по окончании маршрута поезда и по прибытии на станции – точки смены локомотивных бригад. В этом режиме не происходит отсчет координаты УСАВП;
- «маневровый 2» (надпись выводится белым цветом). В этом режиме система не производит управления тягой и не производит управления торможением. Система переходит в режим «маневровый 2» только из режима «маневровый 1» после ввода номера поезда, режима исполнения расписания, параметров состава, перегона и номера пути (для многопутных ББД) и находится в нем до нажатия клавиши («*Вд»), («St») («отпр»). В этом режиме не происходит отсчет координаты УСАВП;
- автоведение (надпись выводится светло-зеленым цветом). В этом режиме система осуществляет управление тягой и торможением;
- советчик (надпись выводится желтым цветом). Синонимами для данного режима в тексте этого документа служат отключение и подсказка. В этом режиме система не производит управления тягой и не производит управление торможением. Режим советчика (отключения, подсказки) устанавливается: при отрицательном ответе на запрос «автоведение поезда?»; из режима автоведения при выключении выходных цепей (тумблер «тормоз УСАВП»); после любого вмешательства машиниста в управление электровозом и в случае сбоев в работе системы. Переход в режим отключения во всех случаях сопровождается звуковым сигналом и соответствующим речевым сообщением: «Взбодритесь! Автоведение в режиме подсказки». При работе системы в режиме советчика выводимая символьная и речевая информация может
использоваться машинистом в качестве подсказки;
- запрет тяги (надпись выводится зеленым цветом). В этом режиме система не производит управления тягой, но осуществляет управление торможением. Переход в режим запрета тяги выполняется только из режима автоведения при красно-желтом сигнале локомотивного светофора. Далее в тексте режимы автоведения и запрета тяги обозначаются общим термином: режим автоведения (для систем ЕКС);
- безопасность (надпись выводится светло-красным цветом). В этом режиме система производит разбор тяги (при необходимости) и осуществляет управление торможением. Переход в режим безопасности производится из режима советчика при попытках нарушения машинистом скоростного режима (любых ограничений скорости, скоростей проследования светофоров, попытках начала движения на запрещающий сигнал светофора). По окончании режима безопасности производится возврат в режим советчика (для систем ЕКС).
37 — Состояние (режим работы) КЛУБ-У. Возможны следующие режимы работы:
- нет связи (надпись выводится красным цветом);
- поездной (надпись выводится светло-зеленым цветом);
- маневровый (надпись выводится белым цветом);
- двойная тяга (надпись выводится светло-зеленым цветом);
- не определен (надпись выводится желтым цветом).
38 — Состояние (режим работы) САУТ-ЦМ. Возможны следующие режимы работы:
- нет связи (надпись выводится красным цветом); — цепи выключены (надпись выводится светло-красным цветом);
- не определен (надпись выводится желтым цветом).

Рисунок 11 – Основной экран системы УСАВП-ЭП1 для электровоза с пультом УНИКАМ
Поле 1 представляет собой экран, имеющий размеры 20х4 знакомест. В поле 1 в основном кадре автоведения выводится информация представленная на рисунке 12.
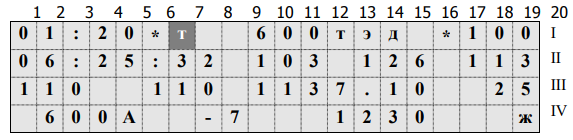
Рисунок 12 – Поле 1 основного экрана системы автоведения для электровоза с пультом
В строке I выводятся следующие данные:
- позиции с 1 по 5 – время хода оставшееся до конца текущей зоны;
- позиция 6 – режим работы системы автоведения:
- «*» — запрет тяги;
- «#» — советчик;
- отсутствие символа – автоведение;
- позиция 7 — индикатор начала торможения системой УСАВП-ЭП1;
- позиции с 9 по 12 – уставка тока, задаваемая системой автоведения в А;
- позиция 13 – режим работы основного тормоза при автоведении;
- «0» — отпуск и зарядка;
- «П» — перекрыша;
- «Т» — торможение;
- отсутствие символа — поездное положение;
- позиция 14 – тип используемого системой автоведения основного тормоза;
- «Э» — электропневматический тормоз;
- «П» — пневматический тормоз;
- отсутствие символа – основной тормоз не выбран;
- позиция 15 – тип используемого дополнительного тормоза;
- «Д» — рекуперативный тормоз;
- отсутствие символа – вспомогательный тормоз не выбран;
- позиция 17 – индикация ограничения скорости;
- мигающий символ «*» — пред торможением приблизительно за 300м;
- «=» — при подъезде к ограничению скорости в тяге;
- позиции с 18 по 20 – расчетная средняя скорость движения в км/ч.
В строке II выводятся следующие данные:
- позиции с 1 по 8 – текущее астрономическое время в формате чч:мм:сс;
- позиции с 10 по 12 – скорость, задаваемая системой автоведения в км/ч;
- позиции с 14 по 16 – расстояние до ближайшего остановочного пункта в 100м;
- позиции с 18 по 20 – текущая измеренная скорость;
В строке III выводятся следующие данные:
- позиции с 1 по 3 – величина текущего оперативного ограничения скорости в км/ч;
- позиции с 6 по 8 – величина текущего постоянного ограничения скорости в км/ч;
- позиции с 10 по 16 – координата начала действия предупреждения в км. пк., если расстояние до него больше 1500 м, в противном случае выводится расстояние в метрах;
- позиции с 18 по 20 – скорость предупреждения в км/ч.
В строке IV выводятся следующие данные:
- позиции с 1 по 5 – уставка тока, задаваемая машинистом в А, выводится в момент включения и при регулировке машинистом, в остальных случаях выводится ускорение или замедление;
- позиции с 8 по 10 – величина и знак профиля пути;
- позиции с 12 по 16 – расстояние до ближайшего светофора в м;
- позиции с 19 по 20 – буквенное отображение цвета светофора.
В поле 2 (рисунок 11) выводится следующая информация:
- «Время хода до ближ з-станции» — оставшееся время хода до ближайшей зонной станции;
- «Назв ближ з-станции или КТ» — название станции исполнения расписания;
- «Название текущего перегона» — название текущего перегона;
- «Скорость для ближ препятствия» — значение скорости места ближайшего снижения скорости (относительно текущей фактической скорости поезда);
- «Расст до ближ препятствия» — расстояние до места ближайшего снижения скорости (относительно текущего местоположения поезда);
- «режим работы УСАВПП» — текущий режим работы системы автоведения;
- «Название ближ светофора» — название ближайшего светофора;
- «Тип ближ препятствия» — тип ближайшего препятствия, из-за которого происходит снижение скорости;
- «Слово состояние УСАВПП» — два слова состояния системы автоведения. На электровозах ЭП1 не используется;
- «Отклонение от расписания» — значение отклонения от расписания;
- «Зонная станция — км» — координата станции исполнения расписания в км;
- «Зонная станция — пк» — координата станции исполнения расписания в пк;
- «Зонная станция — время» — время прибытия на станцию по расписанию;
- «Текущая ж.д. коорд — км» — текущая железнодорожная координата в км;
- «Текущая ж.д. коорд — пк» — текущая железнодорожная координата в пк;
- «Расст до ближ станции» — оставшееся расстояние до ближайшей станции;
- «Режим работы эл-за» — режим работы электровоза: — тяга, выбег, рекуперативное торможение;
- «Расстояние до светофора» — расстояние до ближайшего светофора;
- «Уставка тока» — значение уставки тока, регулируемой машинистом;
- «Факт измер скорость» — значение фактической скорости в км/ч;
- «Расчетная скорость» — значение расчетной рекомендуемой скорости системы автоведения;
- «Текущее огранич скорости» — значение минимального ограничения скорости, выбранного из текущих скоростей постоянного, временного и оперативного ограничений;
- «Расст до конца тек огр скор» — оставшееся расстояние до конца текущего ограничения скорости, вычисленное с учетом длины поезда;
- Длина ближ препятствия», «Скорость огр ближ препятствия» — строки системой автоведения не используются.
При переходе в основную форму левого монитора, нажатием клавиши «ОСН», клавиши системы автоведения имеют другое функциональное назначение. Режим автоведения при этом сохраняется. Вид и пояснения к основной форме левого монитора описаны в руководстве по эксплуатации на пульт управления УНИКАМ для электровоза ЭП1М.
Ввод информации
Перед каждой поездкой в систему необходимо ввести или откорректировать/проверить исходную информацию об условиях ее выполнения. Ввод временных ограничений скорости может вводиться в систему для их исполнения не только перед отправлением, но также, при необходимости, и во время режима автоведения. Ввод числовой информации осуществляется строго в соответствии с трафаретом, в котором символом Х обозначается обязательная цифра, а символом х – необязательная.
В данном случае нужно ввести число, которое может состоять минимум из трёх цифр, т.е. последнюю цифру можно вводить, а можно не вводить. Для ввода километров всегда выдается трафарет ХХХХ, поэтому для правильного ввода числа, содержащего меньше четырех цифр, необходимо вводить лидирующие нули, например: — 0012 соответствует 12 км.
Ввод информации заканчивается нажатием клавиши («Вд»), («▼»), («↓» или «ВВОД»). Данную кнопку следует нажимать после ввода всей информации, указанной на экране, а не после ввода каждого числа. Если вместо ввода информации сразу нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»), то произойдет выход в меню, из которого был вызван данный пункт. После нажатия клавиши («Вд»), («▼»), («↓» или «ВВОД») производится проверка введенной информации на допустимость. Если введенное значение недопустимо, то выдается сообщение об ошибке, которое будет выдаваться до тех пор, пока не будет еще раз нажата клавиша («Вд»), («▼»), («↓» или «ВВОД»). При попытке ввода информации в случае, когда ввод запрещен (например, ввод номера поезда не в режиме отключения), также выдается сообщение об ошибке. Удаление неправильно введенного символа в числе осуществляется нажатием клавиши («Огр»), («◄»), («←»). Удаление осуществляется последовательно, начиная с последнего введенного символа.
Ввод / просмотр информации в оперативном меню
Нажатие клавиши («*Огр»), («i»), («КОНТР») обеспечивает выход в оперативное меню для доступа к следующей информации с целью ее ввода и просмотра. Состав оперативного меню в соответствии с рисунком 13.

Рисунок 13 – Оперативное меню системы УСАВП-ЭП1
1 — Номер поезда. Нажатие на клавишу «1» вызывает экран ввода номера поезда. При вводе номера поезда необходимо ввести не менее одной цифры и нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»). Если введенного номера поезда нет в расписании, то выдается сообщение об ошибке.
2 — Состав. Данный пункт предназначен для ввода количества вагонов. При вводе количества вагонов необходимо ввести одну или две цифры и нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»). Допустимое количество вагонов задается в диапазоне от 1 до 32.
3 — Время. Пункт предназначен для ввода и корректировки текущего астрономического времени.
4 — Координата. Установка координаты возможна при работе системы автоведения в режиме отключения и может использоваться для ручной коррекции текущего положения поезда. Следует отметить, что при погрешностях местоположения поезда от -300 до +300 м целесообразно воспользоваться корректировкой по ближайшему светофору, нажав кнопку «0» при прохождении светофора.
Погрешность измерения пройденного расстояния с помощью ДПС может достигать больших величин, особенно при длительном движении без остановки, поэтому данная возможность позволяет скомпенсировать погрешность ДПС. Для ввода текущей координаты необходимо ввести шесть цифр и нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»). Если вводится меньше шести цифр или введенная координата отсутствует на маршруте движения поезда, то выдается сообщение об ошибке. Если введенная координата встречается на маршруте движения по заданному пути (для многопутного движения) неоднократно, то в этом случае появляется экран уточнения координаты. В первой строке данного экрана слева выводится уточняемая координата, а справа назначение клавиш («Изм»), («►»), («→») и («Огр»), («◄»), («←») в данном экране. Во второй строке выводится имя и номер перегона, на котором расположена уточняемая координата. В третьей строке выводятся номер ветки и номер участка перегона. С помощью клавиши («Огр»), («◄»), («←») в данном экране осуществляется переход к предыдущему, относительно заданного направления движения, перегону, а с помощью клавиши («Изм»), («►»), («→») к следующему. Для подтверждения выбора местоположения по перегонам, веткам и участкам перегона уточняемой координаты следует нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»). Для отказа от уточнения координаты следует нажать клавишу («Вв»), («▲»), («↑» или «огр»). В обоих случаях произойдет возврат в пункт, откуда был вызван экран уточнения координаты. 5 — Расписание. Этот пункт используется для корректировки режима исполнения расписания. В первой строке выводится текущий режим, который может быть установлен в процессе автоведения. По умолчанию устанавливается исполнения расписания по контрольным точкам. Для установки другого значения достаточно нажать соответствующую цифровую кнопку.
Системой автоведения поддерживается пять различных способов исполнения расписания:
- нет нагона. Нагон отставания от расписания не производится. Используется, как правило, при следовании поезда по расписанию или при значительном отставании от расписания, при котором нагон отставания на заданном маршруте следования невозможен. При этом режиме нагона автоведение поезда осуществляется так, как если бы поезд следовал по расписанию;
- нагон до конца текущей зоны. Используется при незначительном отставании от расписания. При этом системой автоведения производится попытка осуществить нагон отставания от расписания до ближайшей зонной станции, т.е. до конца текущей зоны. Зонные станции задаются на маршруте движения в АРМе подготовки данных, причем станция, на которой есть остановка, всегда является зонной. Если по проследованию этой станции отставание ликвидировать не удалось, то осуществляется попытка осуществить нагон до конца следующей зоны и так далее. При отсутствии отклонения от расписания оптимизация потребления энергии системой автоведения осуществляется от текущего местоположения поезда до следующей зонной станции без учета времен проследования промежуточных станций;
- нагон до контрольной точки. Используется, как правило, при отклонении от расписания, когда ликвидация отставания от расписания на ближайших зонах следования поезда невозможна. При этом системой автоведения производится попытка осуществить нагон отставания от расписания до ближайшей контрольной зонной станции. Контрольные зонные станции задаются на маршруте движения в АРМе подготовки данных, причем станции смены бригад всегда считаются контрольными зонными станциями. Если по проследованию этой станции отставание ликвидировать не удалось, то осуществляется попытка осуществить нагон до конца следующей контрольной зоны (контрольной точки) и так далее. Реализация нагона до контрольной зонной станции системой автоведения осуществляется с учетом оптимизации потребления энергии таким образом, чтобы время прибытия на ближайшую промежуточную станцию с остановкой, расположенную на маршруте движения данного поезда от текущего местоположения до ближайшей контрольной точки, не опережало время прибытия на эту станцию по расписанию более чем на 30 с. Аналогичным образом осуществляется ведение поезда системой автоведения с реализацией нагона до контрольной зонной станции при отсутствии отклонения от расписания.
Данный вариант исполнения расписания является наиболее предпочтительным с точки зрения соблюдения расписания и экономии электроэнергии;
- нагон до остановки. Используется при значительном количестве остановок. При этом производится попытка осуществить нагон отставания от расписания до станции, где заложена остановка по расписанию для данного поезда;
- обеспечение прибытия поезда на указанную станцию в заданное время. Используется для ввода нового времени проследования любой станции маршрута, а также в случае назначения нового времени прибытия на конечную станцию. Данный способ исполнения расписания может быть установлен для любой зонной станции с указанными в расписании временами прибытия/отправления, расположенной по ходу движения поезда от текущей координаты местоположения поезда до ближайшей станции с остановкой, включая последнюю. После проследования заданной станции способ исполнения расписания автоматически заменяется на нагон по контрольным точкам.
Если при установленном данном способе исполнения расписания проводится изменение текущего астрономического времени или текущей железнодорожной координаты, то осуществляется проверка возможности обеспечить прибытие поезда на указанную станцию в заданное время при новых значениях астрономического времени и/или железнодорожных координат. Если это оказывается невозможно, то выдается предупреждающее сообщение: — «режим нагона до станции невозможен» и автоматически устанавливается способ исполнения расписания с нагоном по контрольным точкам.
При выборе этого пункта меню происходит переход в экран задания станции прибытия в заданное время. В первой строке данного экрана индицируется имя ближайшей зонной станции по ходу движения поезда. Во второй строке данного экрана указываются в формате час: мин сначала время прибытия, установленное по расписанию, а затем новое время прибытия на станцию. В третьей строке данного экрана указывается назначение клавиш («*Огр»), («i»), («КОНТР») и («*Изм»), («А»), («ДОП»). Просмотр и выбор зонной станции, до которой возможна установка способа исполнения расписания с заданием времени прибытия, осуществляется последовательно с помощью клавиш («*Огр»), («i»), («КОНТР») и («*Изм»), («А»), («ДОП»). С помощью клавиши («*Изм»), («А»), («ДОП») осуществляется переход к следующей станции, до ближайшей зонной станции на которой имеется остановка, а с помощью клавиши («*Огр»), («i»), («КОНТР») к предыдущей зонной станции до текущего местоположения. В процессе выбора зонной станции автоматически показываются времена прибытия для неё по расписанию. Новые времена прибытия для всех показываемых станций, для которых не задано новое время прибытия, совпадают со временами прибытия по расписанию.
Если новое время прибытия на выбранную станцию должно совпадать со временем прибытия по расписанию, его вводить не обязательно. В этом случае завершение задания способа исполнения расписания с обеспечением прибытия на выбранную станцию в заданное время заканчивается нажатием клавиши («Вд»), («▼»), («↓» или «ВВОД»). Для ввода значения нового времени прибытия на выбранную станцию необходимо ввести четыре цифры значения времени в формате «чч:мм» (как при вводе астрономического времени) и нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»). Ввод нового времени прибытия начинается нажатием цифровых клавиш «0, 1, 2». При этом экран задания станции прибытия в заданное время преобразуется в экран, в правой части второй строки, которого выводится трафарет ввода нового времени прибытия с введенной первой цифрой. Ввод значения времени осуществляется по правилам ввода астрономического времени.
Если вычисленная средняя скорость поезда от текущего местоположения до указанной зонной станции в заданное время оказывается 25 км/ч или менее, то выдается сообщение об ошибке: — «избыток времени». Если невозможно обеспечить прибытие поезда от текущего местоположения на указанную зонную станцию в заданное время, из-за имеющихся ограничений скорости, то выдается сообщение об ошибке: — «недостаток времени». Если после выдачи сообщения об ошибке повторно нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»), не изменяя значение времени прибытия, то заданное время будет считаться корректным, но своевременное прибытие не гарантируется. Заданное время становится текущим и осуществляется возврат в экран задания способа исполнения расписания, в первой строке которого отображается имя выбранной станции, для которой задано время прибытия.
Если заданное время прибытия равно текущему астрономическому времени или введено меньше четырех цифр, то выдается сообщение об ошибке: — «недопустимое значение». При правильном вводе значения времени прибытия на указанную зонную станцию, способ исполнения расписания с обеспечением прибытия на указанную станцию в заданное время становится текущим, и осуществляется возврат в экран задания способа исполнения расписания. В первой строке которого отображается имя выбранной станции, для которой задано время прибытия.
Возврат из экрана задания станции прибытия в заданное время в экран задания способа исполнения расписания без изменения текущего способа исполнения расписания, осуществляется нажатием на клавишу («Вв»), («▲»), («↑» или «огр»). 6 — Путь. Для ввода номера пути нужно ввести от одной до двух цифр и нажать клавишу («Вд»), («▼»), («↓» или «ВВОД»). Если бортовая база данных сформирована только для двух главных путей (прямого и обратного направлений движения), то автоматически принимаются следующие номера пути: 1 – для движения в прямом направлении и 2 – для движения в обратном направлении. При этом ввод номера пути запрещен. Если имеются бортовые базы данных для нескольких главных путей, то ввод номеров путей обязателен.
Ввод / просмотр информации в основном меню
Нажатие клавиши («*Изм»), («А»), («ДОП») обеспечивает выход в основное меню для доступа к следующей информации с целью ее ввода и просмотра. Состав основного меню
представлен на рисунке 14.
Назначение и основные функции УСАВП

Системы автоведения поездов грузового и пассажирского движения предназначены для автоматизированного управления подвижным составом с соблюдением норм безопасности движения в соответствии с заданным временем хода (или графиком) на основе выбора энергетически рационального режима движения.
Системы автоведения относятся к автономным системам автоведения, т.е. свое местонахождение и требуемые режимы движения система определяет самостоятельно.
Системы автоведения облегчают труд машиниста, способствуют повышению производительности труда, позволяют экономно расходовать электроэнергию и вести учёт ее расхода.
Повышается безопасность движения за счёт автоматического исполнения скоростного режима движения по сигналам светофоров с учётом постоянных и временных ограничений скорости, а также за счет уменьшения утомляемости машиниста. Система контролирует правильность работы функциональных узлов аппаратуры, осуществляя при этом функцию самодиагностики.
В состав систем автоведения входит регистратор параметров движения (РПДА).
Системы автоведения выполняют следующие функции:
· определяют фактические параметры движения поезда и выводят их на экран дисплея;
· ведут расчет рекомендуемых параметров движения поезда и управляющих воздействий в реальном времени;
· управляют тягой и торможением;
· осуществляют визуальный и звуковой диалог с машинистом;
· производят запись регистрируемых параметров на картридж (через подсистему РПДА);
· проводят тестирование аппаратуры автоведения и тягового подвижного состава и осуществляют контроль исправности аппаратуры.
Система автоведения обеспечивает поддержание заданной скорости и
непрерывно рассчитывает её оптимальное значение в условиях меняющейся поездной обстановки, минимизируя расход топлива и жестко соблюдая расписание (для пассажирского движения) или перегонное время хода.

Дисплей системы информирует машиниста о текущих параметрах следования (Рис. 55):
____________________________________
По желанию машинист может вывести на экран дополнительную информацию, например, давление в тормозной магистрали, список всех ограничений скорости, значения токов, перегон между остановочными пунктами и т.д.
Изменения в настройках системы и ввод данных перед началом движения производится путем считывания их с картриджа или через соответствующее меню с помощью клавиатуры. Работа с меню системы автоведения по сложности не превышает работу с меню мобильного телефона.
Тесты работы аппаратуры системы автоведения и тепловоза (также проводятся через меню. Диагностика в обязательном порядке проводится перед началом работы системы автоведения. В некоторых системах реализована функция самодиагностики аппаратуры в процессе движения.
Оборудование УСАВП-Г и РПДА-Г

1. Блок БС
___________________________________________________________________________________________________________________________________________________________________________________________________
 2. Блоки БР и БНИ
2. Блоки БР и БНИ
_____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
____________________________________________________________________
3. Блок БК
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________

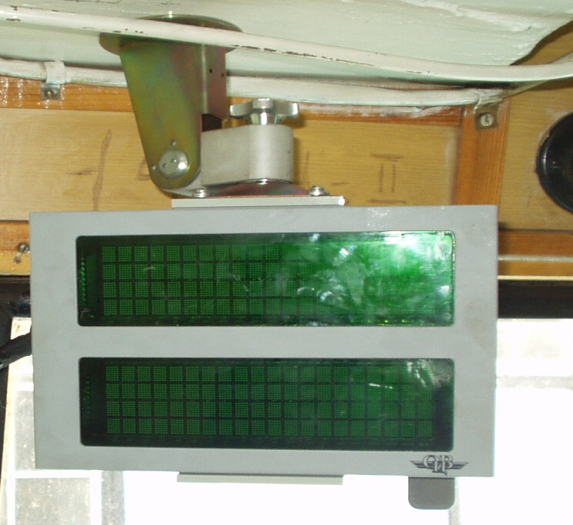
4. Блок БИ
_____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
5. Пневмомодуль 
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
 6. Блок БДУ
6. Блок БДУ
___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
 7. Блок БАВ
7. Блок БАВ
___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
 8. Блок БРВВ
8. Блок БРВВ
___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________

9. Блок БКЦ
_______________________________________________________________________________________________________________________________________________________________________________________________________________________
10. Блок УККНП
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________


 11. Блок БИВМ
11. Блок БИВМ
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
 12. Блок БИП ДПС
12. Блок БИП ДПС
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________

13. Датчик ДПС
____________________________________________________________________________________________________________________________________________________________________________________________________________________________

Назначение клавиш Блока БК

Режимы работы системы автоведения.
Системы автоведения могут работать в следующих режимах:
1. Режим автоведения – система автоведения берет на себя полное
управление поездом, используя органы управления локомотивом.
2. Режим советчика – управление производится машинистом.
3. Режим кнопочного контроллера – управление поездом осуществляется машинистом через клавиатуру системы автоведения.
Во всех режимах система автоведения выводит на экран рекомендации
по энергооптимальному ведению поезда и отображает текущую информацию о состоянии ведения.
Принцип работы
Интеллектуальный центр системы автоведения (Блок БС «Аппаратура систем автоведения») – это компьютер с программой, которая моделирует поведение поезда, используя необходимую информацию, умеет им управлять и знает регламент ведения.
Для моделирования программа автоведения использует данные:
· о текущем состоянии тягового подвижного состава – поступает с подвижного состава от датчиков;
· о составе (его масса, длина, количество вагонов и т.п.) – вводится автоматически или вручную перед началом работы;
· о маршруте следования – содержится в Базе данных маршрутов;
· об ограничениях скорости.
Программа автоведения постоянно следит за меняющейся поездной обстановкой и выдает управляющие команды аппаратуре на тягу, торможение, подачу песка и т.д., ориентируясь на оптимальный расход топлива.
Включение системы
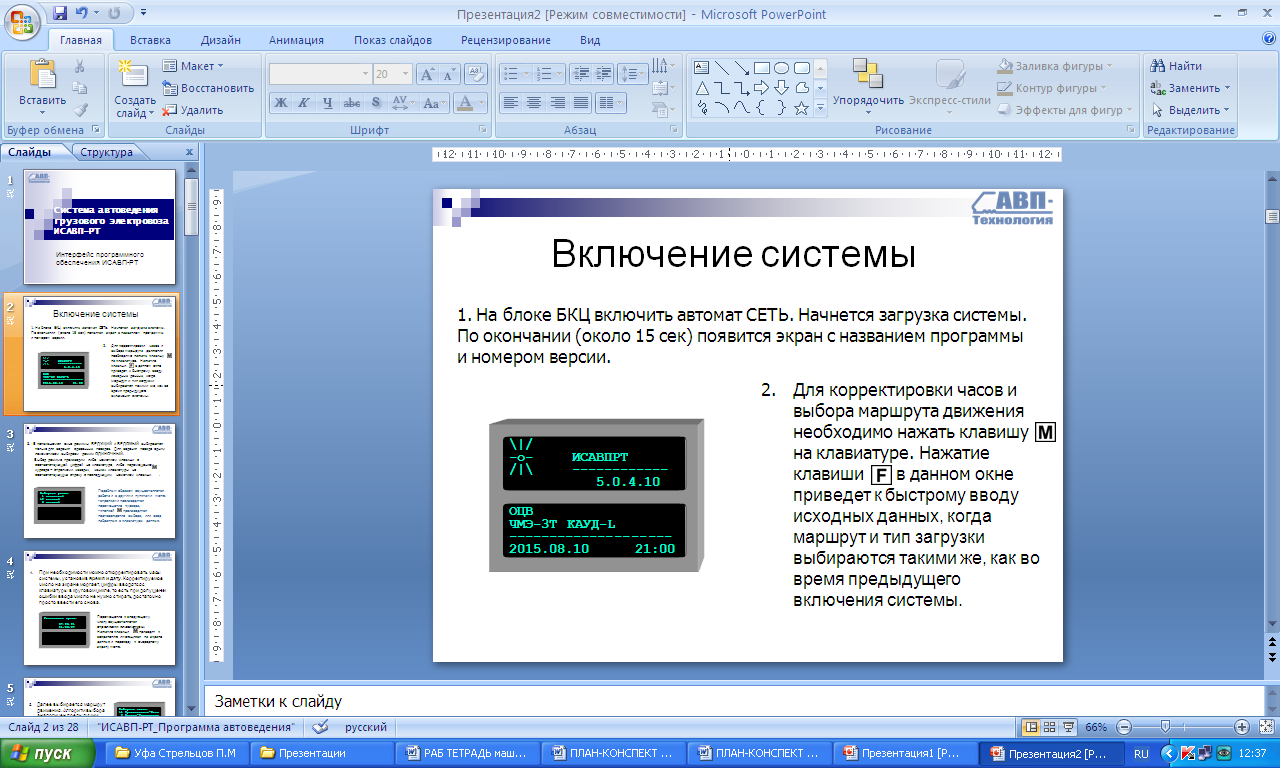




Главный экран системы
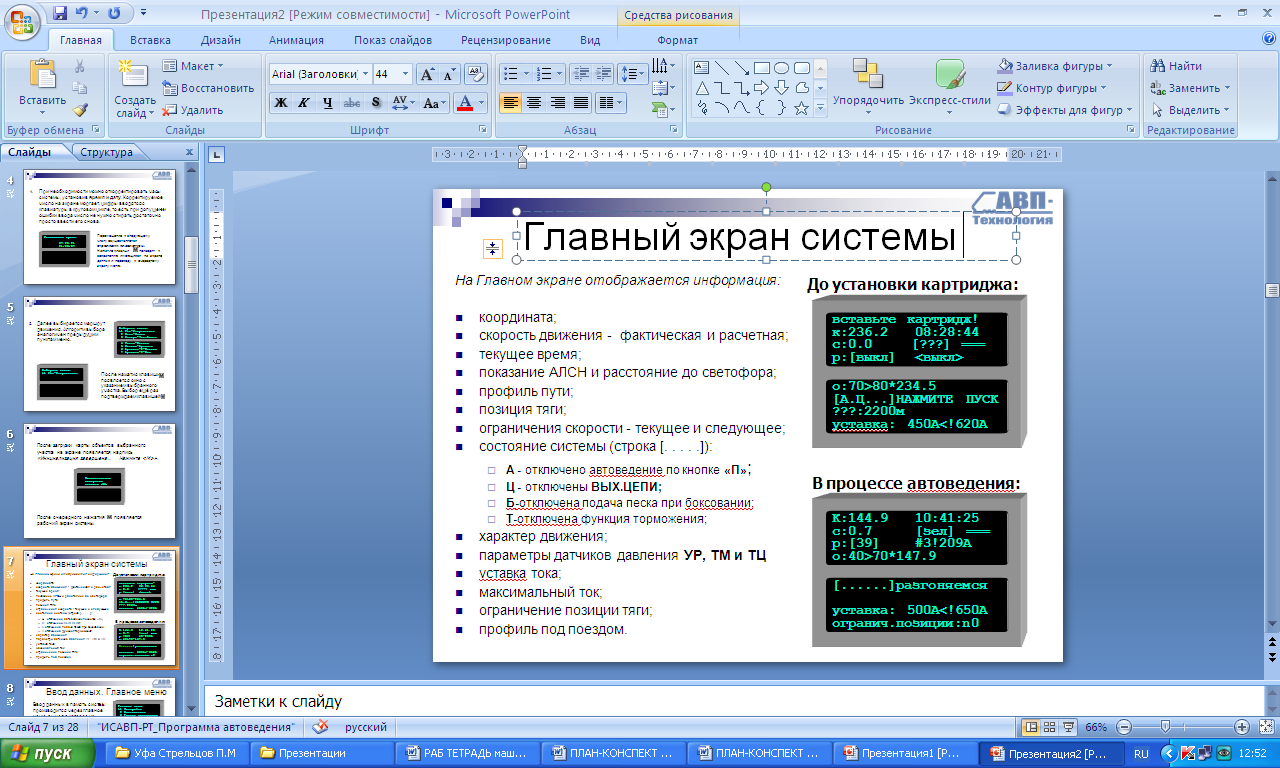
Ввод данных. Главное меню

Меню «НАСТРОЙКА». Координата