Проверка шим контроллера осциллографом в блоке питания
Как нам уже известно из первых уроков, любой микроконтроллер умеет хорошо работать с цифровыми сигналами. Он легко справляется с арифметическими операциями над цифровыми данными, принимает и передаёт цифровые сигналы по линиям связи. А что значит «цифровые» в данном случае?
В самом первом уроке мы зажигали и гасили светодиод с помощью Ардуино. Для того, чтобы зажечь светодиод, мы подавали на его анод высокий уровень сигнала. А чтобы погасить — низкий уровень. Получается, для управления мы использовали только два уровня напряжения: высокий и низкий. Светодиод либо будет гореть, либо не будет. Третьего — не дано. Оперируя только двумя состояниями означает, что мы работаем с цифровым сигналом.
Но что делать, если нам нужно зажечь этот самый светодиод только на половину яркости? Или запустить двигатель, на 30% его мощности? Для решения этой задачи используют подход, называемый широтно-импульсной модуляцией сигнала. О том, что такое ШИМ и как это работает, мы узнаем на сегодняшнем уроке.
Широтно-импульсная модуляция — ШИМ
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент (а кто-то может и натуральный — ничего сложного). Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим. Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Разумеется, в силу человеческой медлительности, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет «плавать» вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.

Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.

Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
Коэффициент заполнения (duty cycle)
Начнем с самого главного параметра — коэффициента заполнения D (он же duty cycle). Этот коэффициент равен отношению периода ШИМ сигнала к ширине импульса:
Пример ШИМ сигнала для разных значений D:

Чем больше D, тем больше мощности мы передаем управляемому устройству, например, двигателю. Так, при D = 1 двигатель работает на 100% мощности, при D = 0,5 — наполовину мощности, при D = 0 — двигатель полностью отключен.
Кстати, кроме коэффициента заполнения для характеризации ШИМ применяют и другой параметр — скважность S. Эти два параметра связаны выражением:
Скважность, как и коэффициент заполнения — величина безразмерная. В отличие от D, она может принимать значения от 1 до бесконечности. Но чаще всего, особенно в англоязычных источниках, используют именно D.
Частота ШИМ
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.
В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Разрешение ШИМ
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Проверка на материнской плате
Итак, при включении питания платы, срабатывает защита. В первую очередь, необходимо проверить мультиметром сопротивление плеч стабилизатора.
Для этих целей также может быть использован тестер радиодеталей. Если одно из них показывает короткое замыкание, то есть, измеренное сопротивление составляет меньше 1 Ома, значит, пробит один из ключевых полевых транзисторов.

Выявление пробитого транзистора в случае, если стабилизатор однофазный, не составляет труда – неисправный прибор при проверке мультиметром показывает короткое замыкание. Если схема стабилизатора многофазная, а именно так питается процессор, имеет место параллельное включение транзисторов. В этом случае, определить поврежденный прибор можно двумя путями:
- произвести демонтаж транзистора и проверить мультиметром сопротивление между его выводами на предмет пробоя;
- не выпаивая транзисторы, замерить и сравнить сопротивление между затвором и истоком в каждой из фаз преобразователя. Поврежденный участок определяется по более низкому значению сопротивления.
Второй способ работает не во всех случаях. Если пробитый элемент определить не удалось, придется все же выпаять транзистор.
Далее производится замена поврежденного транзистора, а также, установка на место всех выпаянных в процессе диагностики радиоэлементов. После этого можно попытаться запустить плату.
Первое включение после ремонта лучше выполнить, сняв процессор и выставив соответствующие перемычки. Если первый запуск был успешным, можно проводить тест с нагрузкой, контролируя температуру мосфетов.
Неисправности ШИМ контроллера могут проявляться так же, как и пробой мосфетов, то есть уходом блока питания в защиту. При этом проверка самих транзисторов на пробой результата не дает.
Кроме этого, следствием нарушения функций ШИМ контроллера может быть отсутствие выходного напряжения или его несоответствие номинальной величине. Для проверки ШИМ контроллера следует вначале изучить его даташит. Наличие высокочастотного напряжения в импульсном режиме, при отсутствии осциллографа, можно определить, используя тестер кварцев на микроконтроллере.
Тестирование ШИМ контроллера
Для тестирования контроллера будем использовать набор ячеек литиевых батарей с номинальным напряжением 80 В, которые применяются для данного электрического велосипеда. Контроллер временно подключен к аккумулятору и мотору, который прикреплен к велосипеду, чтобы приводить в движение заднее колесо. Поворачивая потенциометр по часовой стрелке, двигатель должен начать вращаться постепенно и увеличивать скорость, пропорциональную вращению ручки.
![]()
Чтобы проверить регулятор скорости на реальной нагрузке, надо смонтировать все на своем месте. Посмотреть как он держит нагрузку, вес, долгое время работы и воздействие атмосферной влажности (лучше покрыть плату лаком).
Признаки неисправности, их устранение
Перейдем к рассмотрению конкретных признаков неисправностей ШИМ контроллера.
Остановка сразу после запуска
Импульсный модулятор запускается, но сразу останавливается. Возможные причины: разрыв цепи обратной связи; блок питания перегружен по току; неисправны фильтровые конденсаторы на выходе.
Поиск проблемы: осмотр платы, поиск видимых внешних повреждений; измерение мультиметром напряжения питания микросхемы, напряжения на ключах (на затворах и на выходе), на выходных емкостях. В режиме омметра мультиметром надо измерить нагрузку стабилизатора, сравнить с типовым значением для аналогичных схем.

Импульсный модулятор не стартует
Возможные причины: наличие запрещающего сигнала на соответствующем входе. Информацию следует искать в даташите соответствующей микросхемы. Неисправность может быть в цепи питания ШИМ контроллера, возможно внутренне повреждение в самой микросхеме.
Шаги по определению неисправности: наружный осмотр платы, визуальный поиск механических и электрических повреждений. Для проверки мультиметром делают замер напряжений на ножках микросхемы и проверку их соответствия с данными в даташит, в случае необходимости, надо заменить ШИМ контроллер.

Проблемы с напряжением
Выходное напряжение существенно отличается от номинальной величины. Это может происходить по следующим причинам: разрыв или изменение сопротивления в цепи обратной связи; неисправность внутри контроллера.
Назначение выводов:
При подаче питания на вход VCC
контроллера поступает напряжение через резистор с диодного моста. Микросхема запускает процесс генерации импульсов. Дальнейшая подача питания происходит выпрямлением напряжения с нижней левой обмотки импульсного трансформатора.
Частота генерации микросхемы фиксированная. Она задается величиной резистора на входе RI
или конденсатора на входе
CT
.
Стабилизация напряжения устройства осуществляется за счет сравнения величины тока, протекающего через ключевой MOSFET-транзистор и напряжения обратной связи. Ток оценивается по величине падения напряжения на резисторе в цепи стока транзистора, который подключается к выводу SEN
. Напряжение обратной связи снимается с регулируемого стабилитрона TL431, проходит через оптопару и подается на вывод
FB
микросхемы. От значений напряжений на входах
SEN
и
FB
зависит величина скважности импульсов на выходе
OUT
.
Большинство из рассматриваемых здесь микросхем снабжены несколькими различными системами защиты, предотвращающими выход из строя при непредвиденных ситуациях:
- OVP
(Over Voltage Protection) — защита от превышения напряжения питания. При увеличении напряжения питания на входе
VCC
выше порогового значения (UOVP микросхема прекращает генерацию ШИМ-импульсов на выходе OUT). - UVLO
(Under Voltage Lockout) — триггер Шмитта, разрешающий работу контроллера при достижении напряжения питания на входе VCC значения UVLO on и запрещающей работу при падении напряжения до значения UVLO off. Значения этих напряжений указаны в заводской документации. - OLP
(Over Load Protection) — защита от перегрузки по току. - Некоторые микросхемы имеют вход BNO
(Brownout Protection Pin) — вход защиты от пониженного напряжения питания и импульсных помех на нем. Если напряжение на этом выводе ниже порогового микросхема прекращает генерацию ШИМ-импульсов на выходе
OUT
).
Существует группа ШИМ-контроллеров, включаемых по упрощенной
схеме. Напряжение обратной связи у них снимается с обмотки импульсного трансформатора, питающей микросхему. При таком включении стабильность выходного напряжения ниже, зато количество деталей блока питания намного меньше.
Таблица маркировки ШИМ-контроллеров в корпусе SOT23-6 (обычная маркировка).

Часовой пояс: UTC + 3 часа
как проверить шим-контролер
_________________
О сколько нам открытий чудных готовят просвещенья дух.
«Когда у общества нет цветовой дифференциации штанов, то нет цели!»
Лучшее враг хорошего .
JLCPCB, всего $2 за прототип печатной платы! Цвет — любой!
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
Приглашаем всех желающих 25/11/2021 г. принять участие в вебинаре, посвященном антеннам Molex. Готовые к использованию антенны Molex являются компактными, высокопроизводительными и доступны в различных форм-факторах для всех стандартных антенных протоколов и частот. На вебинаре будет проведен обзор готовых решений и перспектив развития продуктовой линейки. Разработчики смогут получить рекомендации по выбору антенны, работе с документацией и поддержкой, заказу образцов.
Посмотри осцилом, есть ли генерация. Если напряжения питания микры, на ключах. Это самое первое что нужно смотреть. Далее целы ли ключи (при наличии генерации).
_________________
MAXимки, мои любимые микрушки.
Приглашаем 30 ноября всех желающих посетить вебинар о литиевых источниках тока Fanso (EVE). Вы узнаете об особенностях использования литиевых источников питания и о том, как на них влияют режим работы и условия эксплуатации. Мы расскажем, какие параметры важно учитывать при выборе литиевого ХИТ, рассмотрим «подводные камни», с которыми можно столкнуться при неправильном выборе, разберем, как правильно проводить тесты, чтобы убедиться в надежности конечного решения. Вы сможете задать вопросы представителям производителя, которые будут участвовать в вебинаре
Там в обвязке десять деталей, проверить не трудно. Если исправны — меняй микру. Всё правильно тебе подсказали.
dracon, там ключ встроенный. Единственное, что можно проверить — наличие питания для запуска ШИМ-а, что равносильно проверке обвязки просто мультиметром.
_________________
Прибор, защищённый предохранителем, сгорает первым, защитив предохранитель. Закон Мерфи.
Ключь-то встроенный. Но не факт, что этим обошлись. Мне просто встречалось когда встроенным ключом рулили более мощным полевиком. И сам так делал. Поскольку нет схнму конкретного устройства — предполагаю худший вариант.
_________________
MAXимки, мои любимые микрушки.

Там в обвязке десять деталей, проверить не трудно. Если исправны — меняй микру. Всё правильно тебе подсказали.
dracon, там ключ встроенный. Единственное, что можно проверить — наличие питания для запуска ШИМ-а, что равносильно проверке обвязки просто мультиметром.
а не подскажите сколько должно быть там вольт? Если вы смотрели его даташит там на странице 18 есть схема включения которая полностью совпадает с моим БП, но вот вся разница в резисторах r102 r101 которые от третьей ножки сидят на переменки а у меня в плате на плюсе после диодного моста и при прозвони мультиметром там ноль Ключь-то встроенный. Но не факт, что этим обошлись. Мне просто встречалось когда встроенным ключом рулили более мощным полевиком. И сам так делал. Поскольку нет схнму конкретного устройства — предполагаю худший вариант.
там больше нет дополнительных ключей! с ножки микры сразу на транс На третьей ноге д.б. от 10 до 15 вольт. Возможно скачкообразно, если микра живая.
dracon, чтоб не предполагать варианты достаточно открыть даташит. Внешний ключ там не приладишь, т.к. в микре ещё и защита по току встроена.
_________________
Прибор, защищённый предохранителем, сгорает первым, защитив предохранитель. Закон Мерфи.
Последний раз редактировалось Seriyvolk Вс сен 02, 2012 20:45:37, всего редактировалось 1 раз.
А 3-я нога на массу не коротит? Если нет — смотри резюки от нее до моста, далее через фильтр до сетевой кнопки. Мажна в обратной последовательности, это кому как больше нравится.
_________________
я кот — сам по себе.
На третьей ноге д.б. от 10 до 15 вольт. Возможно скачкообразно, если микра живая.
dracon, чтоб не предполагать варианты достаточно открыть даташит. Внешний ключ там не приладишь, т.к. в микре ещё и защита по току встроена. А если микра накрылась тогда не будет питания? если так тогда точно шим контроллер вылетел Я бы вас тут всех не беспокоил и поменял бы ее только вот цена кусачая надо мне наверняка знать Так выпаяй его, и проверь там напряжение снова. Если появилось — ШИМку в мусорку.
_________________
Прибор, защищённый предохранителем, сгорает первым, защитив предохранитель. Закон Мерфи.

Практический ремонт блока питания D-Link JTA0302D-E (5В*2А).
Давно созрела идея сделать методическое пособие по ремонту блоков питания выполненных на ШИМ контроллере UC384X. Пока только делаем наработки, которые должны собраться в единый материал. Сразу оговорюсь, сами мы по такой методике блоки питания на 384Х не ремонтируем, слишком долго, и в большинстве своем при ремонте больше полагаемся на интуицию и опыт. Но столкнувшись с неизвестной дрыгалкой (так мы называем ШИМ контроллер) работаем именно по этой методике.
Начнем ремонт со схемы
Рис. Схема блока питания D-Link
Важное замечание если есть хоть малейшее подозрение, что в первичной цепи блока питания есть дефект, рекомендуется включать на лампу накаливания 220В. Пример подключения на лампу. При таком включении при коротком замыкании в первичной цепи блока питания, у Вас не вышибет автоматик, а просто лампочка загорится во весь накал.
Рис. Подключение ремонтируемого блока питания на лампу накаливания 220В.
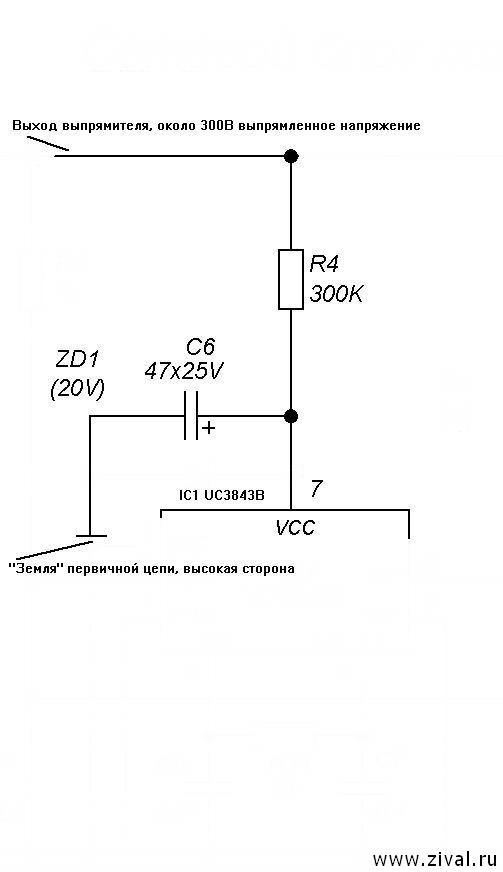
Рис. Цепь запуска при включении, блок питания D-Link
| К слову сказать на схеме указана UC3842B, у рассматриваемого блока питания стоит UC3843A. В чипах, обозначение которых содержит индекс «А», снижен стартовый ток и несколько выше точность опорного напряжения, но стоимость их одинакова. |
На 7 ноге присутствует 7,6В, что соответствует напряжению выключения. Фактически ШИМ контроллер даже не включался, так как для включения требуется не менее 8,4В на этой ноге. Замеряем так называемый пусковой конденсатор С6 (47мкФ*25В) емкость конденсатора 18мкФ. Меняем конденсатор С6 (47мкФ*25В) на конденсатор 47мкФ*50В, напряжение на 7 ноге микросхемы появилось и стало равным 12В.
| Замена конденсатора на другой номинал вызвана тем, что на этом месте привычнее видеть конденсатор именно такого номинала, но и 25В тоже должен нормально работать, так как параллельно ему стоит защитный стабилитрон ZD1 на 20В. |
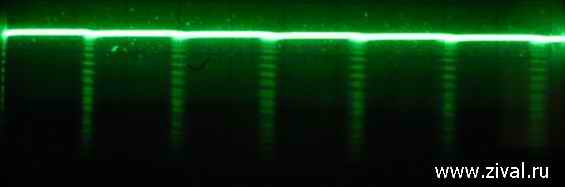 |
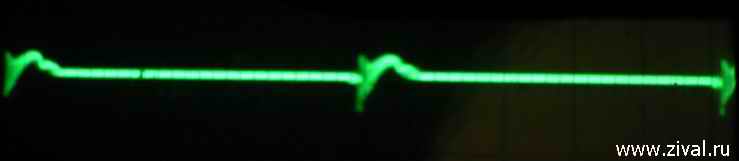 |
| Рис. Форма напряжения питания на 7 ноге UC3842 до замены конденсатора С6. | Рис. Форма напряжения питания после замены конденсатора С6. |
Собственно ремонт закончился. Напряжение на выходе стало в норме.
- Проверка выходного напряжения на нагрузку. Важный этап про который почему то, некоторые механики забывают. Подключаем на выход +5В -автомобильную лампу 12В ближний/дальний свет, лампа должна гореть довольно ярко даже на дальнем свете. Если блок питания не зажигает автомобильную лампу, выходные конденсаторы под замену. В нашем случае проверка на лампу прошла успешно.
Вывод. Данный пример оказался не очень интересный в плане поиска неисправности, но он показывает очень характерную поломку для микросхемы ШИМ контроллера 384x, выход из строя пускового конденсатора.
Практический ремонт. Как бы на самом деле происходил ремонт -общее время ремонта от начала до конца, с мини тех. прогоном 30 мин.
- Меряем входное, выходное сопротивление.
- Включаем, смотрим выходное напряжение.
- Разбираем, осматриваем, меняем пусковой конденсатор не задумываясь, без всяких замеров и осциллограмм.
- Включаем меряем выходное напряжение и выдаем из ремонта с проверкой на лампу 12В.
Запуск и проверка от внешнего блока питания12В, моделирование работы ШИМ контроллера.
Рис. Запуск микросхемы UC3843A от внешнего блока питания.
Данная процедура позволяет проверить работоспособность микросхемы ШИМ контроллера. В рассматриваемом примере этого делать не надо так, как блок питания запустился полсе замены пускового конденсатора, материал изложен в ознакомительных целях. Кратко, на 5 и7 ногу подаем землю и +12В соответсвенно. На 8 ноге должно появится опорное напряжение +5В, на 4 ноге пила, на 6 ноге импульсы управляющие работой силового ключа.
Почему подано 12В?
Во первых, UC3843A напряжение включения 8,4В.
Во вторых, на входе по питанию в блоке питания стоит стабилитрон на 20В, так что больше 20 вольт подавать нельзя.
В третьих, 12 вольт лекго снять с обыкновенного блока питания ATX для компьютера.
1 комментарий
Вентиляционные отверстия, конечно, улучшат охлаждение блока питания, это не подвергается сомнению. То есть фактически мы облегчим тепловой режим, только вопрос чего?
Силовой транзистор? Ключевой транзистор стоит без радиатора, это само за себя говорит.
Конденсаторов, от высыхания? Но конденсаторы в этой схеме выходят из строя по высокому ESR конденсаторов выходного фильтра С9 (1000мкФ*10В). И как правило вполне исправный конденсатор С9 (1000мкФ*10В), но с высоким ESR сперва выходит из строя сам а потом уже тянет за собой цепочку С6(47мкФ*25В),ZD1 (20В), ну и если «повезет» ICC1 (UC3845) своим 100% заполнением вытащит силовой ключ в режим непрерывных токов и как говорится судьба ключа зависит от 5-10секунд работы в таком режим, тут не поможет даже принудительная вентиляция. Фактически установив конденсатор С9 (1000мкФ*10В) с гарантированно низким ESR, мы решим проблему с высыханием конденсаторов на корню, без дополнительной вентиляции.
Трансформатора? Вот тут кроме того, что трансформатор рассчитывали не в обрез ни чего не могу предложить, возможно вентиляционные отверстия тут принесут несущественную, но пользу.
Резисторы? Да, резисторы токового датчика R2 (1.8ом) и цепи обратного хода R1(39ком) греются, но геометрически, они стоят довольно далеко от конденсаторов, если не брать в расчет конденсатотра выпрямительного фильтра С1(22мкФ*400В), который практически лежит на этих резисторах, так что и здесь эффект будет, но незначительный.
Теперь о плюсах герметичного корпуса.
Электробезопасность, корпус защищен от брызг, от попаданий мелких предметов внутрь, за мелкие предметы принимаются и тараканы.
Пожаробезопасность, в процессе работы температура блока питания держится довольно высокая, но в случае внутреннего возгорания, на придание корпусу блока питания состояния мягкого пластилина не потребуется много времени, и он просто схлопнется внутрь не успев прогореть, тем самым просто потушив возгорание. В случае же перенапряжения, когда на входе появится 380в вместо положенных 220В, у вас гарантированно, из блока питания не вылетит ни одна искорка, микровзрыв, если таковой случится, произойдет внутри блока
Вообще мне на глаза попадался тепловой расчет и теплограмма такого блока питания, не скажу, что там все идеально, но и поводов для беспокойства я тоже не обнаружил. Расчеты произведены при нагрузке в 24 часа 365 дней в году. Скажу больше, корпус получился настолько удачным, что в таком корпусе вы увидите довольно много блоков питания небольшой мощности и на других ШИМ контроллерах, но по расположению деталей внутри – они как братья близнецы. С другой стороны блоки питания, при запуске в производство, проходят подписание проекта. А в любом проекте обязательно рассматривается вопрос охлаждения силовых элементов, либо аргументируется отсутствие дополнительного охлаждения.
Мое мнение. Дополнительных отверстий делать не надо, хотите улучшить тепловой режим работы, ставьте в выходном фильтре LOW ESR конденсаторы, стоимость такого ремонта увеличится на 5-7 рублей, но полученный эффект будет лучше, чем отверстия в корпусе.
Если же, Вас все таки не убедили наши аргументы. Примите к сведению. Охлаждение эффективно, если есть приток холодного воздуха и отвод горячего. Таким образом, отверстий должно быть, как минимум два, причем эти отверстия должны быть по разным сторонам корпуса. Желательно, чтобы одно отверстие было ниже другого, то есть надо знать, как будет установлен блок питания в розетке.

Шим-контроллер считают «сердцем» источников питания, но предварительно нужно проверить и другие компоненты блока питания выполнив стандартную последовательность действий по ремонту блока питания (БП):
1) В выключенном состоянии источник внимательно осмотреть (особое внимание обратить на состояние всех электролитических конденсаторов — они не должны быть вздуты).
2) Проверить исправность предохранителя и элементов входного фильтра БП.
3) Прозвонить на короткое замыкание или обрыв диоды выпрямительного моста (эту операцию, как и многие другие, можно выполнить, не выпаивая диоды из платы). При этом в остальных случаях надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором (в подозрительных случаях, элемент схемы необходимо выпаивать и проверять отдельно).
4) Проверить исправность выходных цепей: электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов и диодных сборок.
5) Проверить силовые транзисторы высокочастотного преобразователя и транзисторов каскада управления. Обязательно проверить возвратные диоды, включенные параллельно электродам коллектор-эмиттер силовых транзисторов.
Эти действия, дают положительный результат в обнаружении только следствия неработоспособности всего блока, но причина неисправности в большинстве случаев находится гораздо глубже. Например, неисправность силовых транзисторов может быть следствием: неисправности цепей схемы защиты и контроля, нарушения цепи обратной связи, неисправности ШИМ-преобразователя, выхода из строя демпфирующих RC-цепочек или, межвитковый пробой в силовом трансформаторе. Поэтому, если удается найти неисправный элемент, то желательно пройти все этапы проверок, перечисленные выше (т. к. предохранитель сам по себе никогда не сгорает, а пробитый диод в выходном выпрямителе становится причиной «смерти» ещё и силовых транзисторов высокочастотного преобразователя).
В качестве шим-контроллера («сердца» источников питания) долгое время использовали микросхему TL494, а затем и ее аналоги (MB3759, KA7500B … KA3511, SG6105 и др.). Проверку работоспособности такой микросхемы, например, TL494 (рис. 1) можно произвести, не включая блок питания. При этом микросхему необходимо запитать от внешнего источника напряжением +9В..+20В. Напряжение подается на вывод 12 относительно выв. 7 — желательно через маломощный выпрямительный диод. Все измерения тоже должны проводиться относительно выв. 7. При подаче питания на микросхему контролируем напряжение на выв. 5. Оно должно быть +5В (±5%) и быть стабильным при изменении напряжения питания на выв. 12 В пределах +9В..+20В. В противном случае не исправен внутренний стабилизатор напряжения микросхемы. Далее осциллографом смотрим напряжение на выв. 5. Оно должно быть пилообразной формы амплитудой 3,2 В (рис. 2). Если сигнал отсутствует или иной формы, то проверить целостность конденсатора и резистора, подключенных к выв. 5 и выв. 6, соответственно. В случае исправности этих элементов микросхему необходимо заменить. После этого проверяем наличие управляющих сигналов на выходе микросхемы (выв. 8 и выв. 11). Они должны соответствовать осциллограммам, приведенным на рис. 2. Отсутствие этих сигналов так же говорит о неисправности микросхемы. В случае успешного прохождения испытаний микросхема считается исправной.
Читайте также:
- Видеокарта hd 5830 как подключить
- Сколько майнит процессор xeon
- Fedora сколько оперативной памяти
- Файл end на диске c что это
- Cooler master nr200 установка atx блока питания
DIY: отладка программ micro:bit с помощью осциллографа (часть 1)
Если ваше хобби или работа связана с микрокомпьютерами и электроникой, то приходится отлаживать как программы, так и «железо», проверяя сигналы на цифровых и аналоговых линиях. В простых случаях для отладки достаточно мультиметра, тестового включения или выключения светодиодов. Но при отладке схем с импульсными сигналами не обойтись без осциллографа.
В этой статье мы расскажем, как при отладке устройств на базе micro:bit (или другого микрокомпьютера) использовать осциллограф. Вы научитесь настраивать осциллограф и проверять сигналы широтно-импульсной модуляции (ШИМ).
Выбор осциллографа
Прежде чем приобрести осциллограф, изучите различные возможности. Дело в том, что цена осциллографов в зависимости от его типа и возможностей может меняться в очень широких пределах — от тысяч до сотен тысяч рублей.
Вам предстоит сделать выбор между цифровым или аналоговым осциллографом, понять, какая нужна полоса пропускания, сколько и каких требуется входов, купить осциллограф как отдельный прибор или как USB-приставку к компьютеру.
Цифровой или аналоговый
Если кратко, то для серьезной работы с микрокомпьютерной техникой, робототехникой и электроникой следует использовать цифровые осциллографы.
Аналоговые осциллографы сделаны на базе электронно-лучевой трубки, причем на экране вы видите измеряемый сигнал, поступающий на вход осциллографа, в реальном времени. Такие осциллографы удобны при просмотре периодических сигналов, например, при отладке аналоговой звуковой или радиоаппаратуры.
Если сигналы однократные, непериодические или сложные по форме, то могут возникнуть проблемы с синхронизацией и просмотром. И хотя есть запоминающие осциллографы с электронно-лучевой трубкой, пригодные для просмотра даже однократных сигналов, их стоимость обычно довольно высока.
В современных цифровых осциллографах происходит непрерывное преобразование входного сигнала (или сигналов, если входов несколько) в цифровую форму с помощью скоростного аналого-цифрового преобразователя (АЦП). Полученные в результате данные сохраняются в памяти осциллографа.
Далее в зависимости от выбранного режима и настроек содержимое этой памяти в том или ином виде показывается на экране цифрового осциллографа. При этом можно просматривать сигнал непрерывно, как на экране аналогового осциллографа, или фрагментами.
Например, можно смотреть фрагменты, извлекаемые из памяти в результате автоматической синхронизации или по срабатыванию так называемого триггера.
С помощью триггера запускается просмотр сигнала, сохраненного в памяти, при достижении им определенного значения (по фронту или спаду), по ширине импульса или другим параметрам в зависимости от модели осциллографа. Изображение на экране можно растягивать или сжимать, изучая форму сигнала в деталях.
Цифровые осциллографы могут быть многоканальными (два или четыре аналоговых входа). Также в некоторых моделях могут быть дополнительные входы цифрового логического анализатора (обычно 16 входов).
Если осциллограф многоканальный, то на его экране можно наблюдать одновременно несколько сигналов. Например, это могут быть сигналы ШИМ управления двигателями.
Когда возникает необходимость просмотра множества цифровых сигналов, поможет встроенный в осциллограф цифровой логический анализатор (рис. 1). И если в простейших моделях вы можете увидеть только сами цифровые сигналы, то есть модели осциллографов, распознающих протоколы передаваемых данных, например, UART или I2C.
Цифровой анализатор не покажет форму сигнала. В нем используются триггеры, которые срабатывают при изменении состояния входного сигнала с 0 на 1 или наоборот. Порог срабатывания триггеров можно настраивать.
Заметим, что цифровой анализатор можно приобрести как отдельный прибор. В этом есть смысл, если вам приходится часто анализировать потоки данных (а не форму сигнала) или нужно много цифровых каналов.
Полоса пропускания и частота дискретизации сигнала
Стоимость осциллографа очень сильно зависит от таких параметров, как полоса пропускания и скорость оцифровки сигнала. Эти параметры настолько важны, что обычно написаны на лицевой панели прибора.
Полоса пропускания осциллографа определяет возможный частотный диапазон исследуемых сигналов. Если исследовать высокочастотные аналоговые сигналы, то вам нужен осциллограф с достаточной полосой пропускания.
При этом надо учесть, что на частоте полосы пропускания входной сигнал будет ослаблен на 3 dB или на 30%. Это существенное ослабление, поэтому рекомендуется выбирать осциллограф с полосой пропускания, превышающей в 3–5 раз максимальную частоту исследуемых аналоговых сигналов.
Что же касается цифровых сигналов, то тут ситуация еще хуже. Чтобы увидеть на экране меандр с четкими краями, полоса пропускания должна раз в 10 превышать частоту исследуемых импульсов.
Теперь о частоте дискретизации или частоте выборки.
Выше в статье мы говорили, что цифровые осциллографы непрерывно преобразуют поступающие на его входы сигналы в цифровые данные. Не углубляясь в детали, отметим, что для точного воспроизведения формы сигнала частота дискретизации должна быть в 5 раз выше полосы пропускания.
Таким образом, чем шире полоса пропускания, тем более точные измерения вы можете сделать с помощью своего осциллографа. Так что тут все зависит от бюджета, который у вас есть на приобретение этого прибора.
Отдельный прибор или USB-приставка
Если бюджет ограничен, но хочется приобрести осциллограф с хорошими параметрами, возможно, подойдет осциллограф-приставка к компьютеру с интерфейсом USB.
Уточните, имеется ли у такого осциллографа гальваническая развязка входов с USB-портом, обычно ее нет. В этом случае безопаснее использовать для работы ноутбук, получающий питание от аккумулятора.
Конечно, осциллограф как отдельный прибор, не требующий подключения к компьютеру, удобнее чем USB-осциллограф. Для отладки большинства несложных систем с микрокомпьютерами вам не потребуется самое новое устройство. Попробуйте поискать на Алиэкспресс, там продаются относительно недорогие приборы, или загляните на Авито.
Готовим осциллограф к работе
Перед проведением измерений или исследований с помощью осциллографа необходимо как минимум выполнить его автоматическую калибровку, а также настройку компенсации щупов. Иначе вы увидите на экране осциллографа вовсе не то, что есть на самом деле.
Осциллограф стоит недешево, и чтобы использовать его возможности, обязательно прочитайте инструкцию к вашей модели. Скорее всего ее можно найти в интернете, да еще и на русском языке.
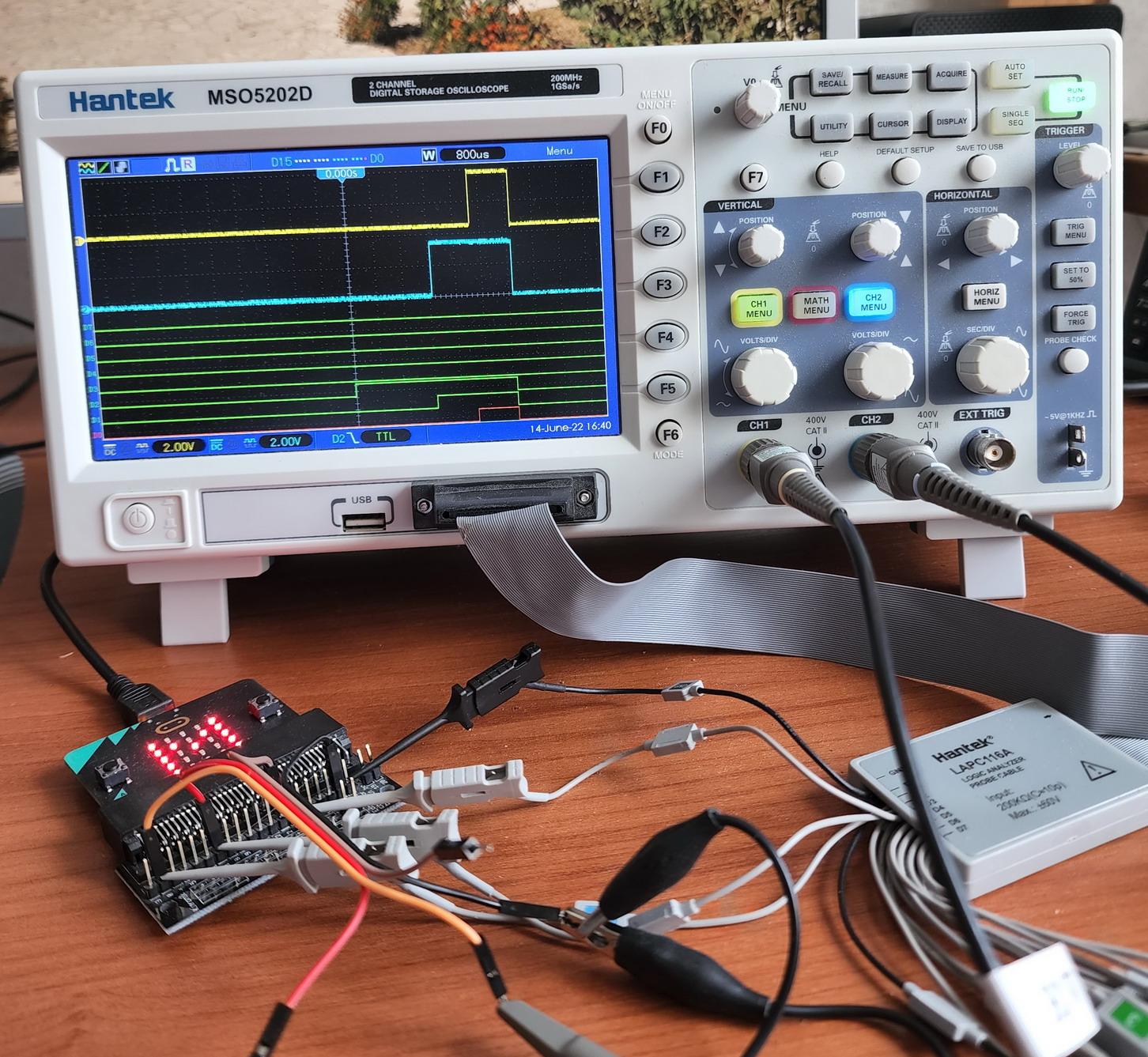
Мы расскажем об использовании осциллографа Hantek MSO5202D с полосой пропускания 200 МГц и скоростью выборки 1 Gs/s (один миллиард выборок в секунду). У этого осциллографа два аналоговых входа и логический анализатор на 16 входов.
Для осциллографов других марок описанные в статье процедуры выполняются аналогично, ищите детали в документации.
Начальная инициализация
Итак, вы приобрели новый осциллограф Hantek, а может быть и бывший в употреблении. Чтобы сбросить его настройки в состояние по умолчанию, воспользуйтесь кнопкой DEFAULT SETUP. Кнопка F0 закроет меню настройки по умолчанию, а кнопка F1 сохранит исходные настройки.
Если нужно переключить язык интерфейса осциллографа, то сначала нажмите кнопку UTILITY, а затем с помощью кнопки F6 перейдите на вторую страницу меню. Там нажимайте кнопку F2 до тех пор, пока интерфейс не переключится на нужный вам язык.
Кстати, на этой же странице вы можете поменять цветовую гамму изображения на экране, нажимая кнопку F3. По умолчанию выбран голубой цвет Blue.
Автоматическая калибровка
Процедура автоматической калибровки нужна для получения максимальной точности измерений. Ее нужно запускать, если температура изменилась более чем на 5 градусов.
Включите осциллограф и прогрейте его в течение 20 минут. Отсоедините от осциллографа все кабели, если они были подключены. Затем нажмите кнопку UTILITY, выберите из меню Do Self Cal (Выполнить автоматическую калибровку) и следуйте указаниям на экране.
Тут придется подождать минут 10–15. Процедура калибровки выполняется довольно долго, и пока она идет, внутри осциллографа слышны щелчки. Не выключайте осциллограф, пока калибровка не закончится.
Настройка компенсации щупов
Для исследования сигналов через аналоговые входы используются щупы. В осциллографе Hantek MSO5202D предусмотрены аналоговые входы CH1 (желтый) и CH2 (синий), а также вход для подачи внешнего сигнала триггера EXT TRIG (серый).
Прежде чем пользоваться щупами, настройте их компенсацию.
Начнем со входа CH1. Подключите к этому входу щуп, и установите на нем коэффициент ослабления 10X.
Нажмите кнопку PROBE CHECK. На экране появится инструкция — нужно проверить коэффициент ослабления и подключить щуп к контактам PROBE COMP. Эти контакты (земля и сигнальный) обозначены на панели осциллографа как ~5В @1КГц.
После подключения на входе канала CH1 появится тестовый сигнал в виде меандра (периодический сигнал прямоугольной формы) с амплитудой 5В и частотой 1КГц.
Убедитесь, что установлен коэффициент ослабления 10X, и это соответствует выбору в меня Probe. При необходимости с помощью кнопки F1 выберите правильное значение для канала CH1. После этого нажмите кнопку F2, выбрав функцию проверки Check. На экране появится тестовый сигнал в виде меандра.
Далее вооружитесь пластмассовой отверткой из комплекта поставки осциллографа, и вращайте подстроечный конденсатор на разъеме щупа. Добейтесь, чтобы форма отображаемого сигнала была правильной, с прямыми углами. Металлическую отвертку использовать нельзя, так как появляются наводки и искажения.
На рис. 2 показан щуп и отвертка, которой нужно вращать подстроечный конденсатор.

На рис. 3 и 4 показаны осциллограммы для случая, когда компенсация настроена неправильно — наблюдаются либо заваленные фронты, либо выбросы.
Если вам удалось настроить компенсацию, вы увидите меандр с прямоугольными фронтами без заваленных фронтов и выбросов (рис. 5).
Закончив настройку, нажмите кнопку F3 (функция Finish).
Повторите процедуру для второго щупа, подключив его к разъему CH2. Не забудьте выбрать в меню Probe с помощью кнопки F1 коэффициент ослабления 10X для канала CH2.
Теперь ваш осциллограф настроен и готов к работе!
Также мы подготовили краткую видеоинструкцию по начальной настройке осциллографа Hantek MSO5202D.
Исследуем сигналы ШИМ
Ваш микрокомпьютер micro:bit может управлять моторами, яркостью свечения светодиодов или ламп накаливания. Однако в нем нет цифро-аналогового преобразователя (ЦАП), с помощью которого программа могла бы задавать уровень напряжения на выходах микрокомпьютера. Вместо этого для регулирования скорости вращения моторов или яркостью светодиодов используется широтно-импульсная модуляция ШИМ (Pulse-Width Modulation, PWM) .
ШИМ предполагает, что на управляемое устройство будут подаваться импульсы. Чем шире импульсы, тем быстрее будет вращаться вал двигателя или тем ярче будет гореть светодиод.
Но что делать, если программа ведет себя не так, как вы ожидаете?
Конечно, можно подключить к выходу микроконтроллера стрелочный или цифровой вольтметр, и наблюдать за его показаниями. Однако так вы не узнаете реальное положение дел, а получите лишь некоторые усредненные значения напряжения.
Другое дело, если для исследования сингалов ШИМ использовать осциллограф. Он покажет импульсы на экране, и вы сможете проверить, как работает ваша программа (рис. 6).
Программа для управления ШИМ
В микрокомпьютере micro:bit для получения сигналов ШИМ можно использовать одновременно три аналоговых контакта P0, P1 и P2 (могут работать как выходные и как входные).
Если вы составляете программу в визуальной среде Microsoft MakeCode, то для получения сигнала ШИМ нужно использовать блок записать аналоговый сигнал в контакт. Этот блок находится в палитре Расширенные — Контакты.
В качестве параметра блоку передается значение о 0 до 1023. Чем больше будет это значение, тем шире импульс на выходе контакта.
Сразу заметим, что к выходам micro:bit можно подключать только слаботочные устройства, потребляющие ток не более 5 мА, такие как светодиоды с токоограничивающими резисторами. Если нужно управлять двигателями, используйте специальные контроллеры, например, MX1508.
Для изучения приемов работы с осциллографом при отладке программ для micro:bit мы подготовили несложную программу microbit-pwm.hex.
Эту и другие программы из нашей статьи можно загрузить из репозитория Github https://github.com/AlexandreFrolov/oscilloscope-bin.
В блоке при начале программы для хранения текущих значений ШИМ инициализируются три переменные pwm1, pwm2 и pwm3, по одной для каждого контакта P0, P1 и P2. В них записываются значения 64, 128 и 256, соответственно (рис. 7).
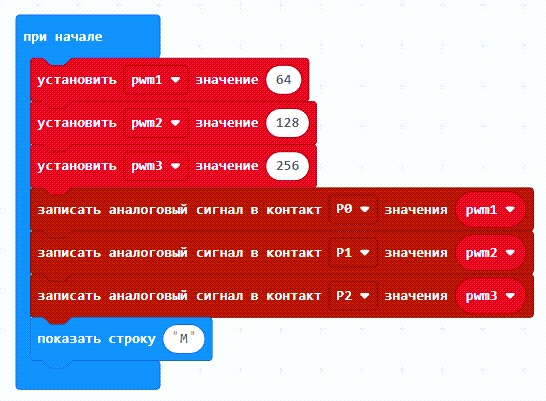
Далее с помощью блока записать аналоговый сигнал в контакт эти значение выводятся в соответствующие контакты, а на мониторе micro:bit отображается буква «M».
Для управления шириной импульсов используйте кнопки А и В, расположенные на плате микрокомпьютера.
Когда вы нажимаете кнопку A, блок обработки этой кнопки увеличивает текущее значение переменной pwm1 на 128. При достижении или превышении максимально допустимого значения 1024 в эту переменную записывается значение 64.
И, наконец, обработчик нажатия кнопки A устанавливает ширину импульсов ШИМ на контакте P0 с помощью блока записать аналоговый сигнал в контакт (рис. 8).

Аналогично устроен обработчик нажатия кнопки B, а также комбинации кнопок A и B (рис. 9).

Теперь нажимая кнопки, вы можете регулировать ширину импульсов на каждом из контактов P0, P1 и P2 по отдельности.
Подключаем осциллограф к micro:bit
Если вы уже откалибровали свой осциллограф и настроили компенсацию щупов, подключите канал CH1 осциллографа к контакту P0 микрокомпьютера micro:bit, а канал CH2 — к контакту P1. Не забудьте также подсоединить щупы к земле micro:bit.
При сборке вам пригодится переходник, который можно найти в интернете по названию «сборный Edge Connector для BBC micro:bit», или адаптер micro:bit Breakout, удобный для установки на макетную плату (рис. 10).

Подключите micro:bit к интерфейсу USB вашего компьютера, а затем загрузите описанную выше программу microbit-pwm.hex в микрокомпьютер, скопировав файл программы на дисковое устройство MICROBIT.
Убедитесь, что после завершения загрузки на дисплее micro:bit появилась буква «M». Это означает, что программа работает, выдает сигналы ШИМ на контакты, а также ожидает, когда вы будете нажимать кнопки A и B.
Теперь нажмите на осциллографе кнопку AUTO SET. На экране осциллографа вы увидите сигналы на контактах P0 и P1 (рис. 11).
Закройте меню Autoset, нажав кнопку F0 на панели осциллографа. Покрутите ручку SEC/DEV в блоке HORIZONTAL, чтобы изменить масштаб по горизонтали. Так вы сможете рассмотреть импульсы более детально.
Теперь нажмите несколько раз кнопку A на плате micro:bit. Вы увидите, как импульсы, поступающие с контакта P0, будут расширяться. На рис. 12 мы показали осциллограмму, растянутую по горизонтали.
Проведите аналогичный эксперимент с кнопкой B, убедившись, что ее нажатие приводит к расширению импульсов на контакте P1.
Обратите внимание, что в нижней части экрана осциллографа отображается частота следования импульсов, равная 50 Гц. Для измерения амплитуды можно использовать тот факт, что одна клетка шкалы осциллографа соответствует напряжению 2 В. Далее в статье мы расскажем, как измерить амплитуду и длительность импульсов точнее с помощью курсора.
Используем триггер
Режим AUTO SET требует минимальных навыков и в ряде случаев удобен для просмотра периодических сигналов. Однако по-настоящему возможности цифрового осциллографа раскрываются только при использовании триггера.
Как мы уже говорили, цифровой осциллограф непрерывно преобразует входные сигналы в цифровую форму, сохраняя их в памяти. Триггер осциллографа позволяет задать событие, при возникновении которого данные из памяти показываются на экране осциллографа. При этом вы сможете посмотреть осциллограмму как до возникновения события, так и после него (разумеется, только в определенном интервале времени — ведь объем памяти осциллографа ограничен).
Чтобы использовать триггер, нажмите кнопку TRIG MENU, расположенную в блоке TRIGGER. В правой части экрана осциллографа появится меню Trigger, где можно определить условие возникновения события. Кнопки F1-F6 предназначены для работы с элементами этого меню.
В меню Type оставьте режим Edge, позволяющий задать срабатывание триггера по нарастающему или спадающему фронту импульса. Если вас интересует срабатывание по нарастающему фронту, задайте в меню Slope с помощью кнопки F3 значение Rising, иначе — значение Falling.
В меню Source выберите вход осциллографа, состояние которого будет отслеживать триггер. Укажите здесь CH1 или CH2.
Чтобы осциллограмма отображалась не все время, как в режиме AUTO SET, а только при срабатывании триггера, задайте в меню Mode с помощью кнопки F4 режим Normal.
На рис. 13 показано срабатывание триггера по нарастающему фронту.
Теперь растяните ручкой SEC/DIV осциллограмму по горизонтали, и нажмите несколько раз кнопку F3. Убедитесь, что в центре экрана, обозначенного как 0.000s, появляется то нарастающий, то спадающий фронт импульса с контакта P0. При этом импульс с контакта P1 будет соответствующим образом сдвигаться по горизонтали.
Ищем пятна на солнце
В идеальном мире фронты меандра строго вертикальные, а напряжение на контактах micro:bit мгновенно меняется от нуля до примерно 3.3 В.
Однако на самом деле не все так просто. В схемах всегда присутствуют паразитные емкости и индуктивности, способные исказить форму сигнала. Выходное сопротивление контактов micro:bit также не равно нулю.
Растяните ручкой SEC/DIV осциллограмму по горизонтали еще сильнее, чтобы увидеть плавное нарастание фронта (рис. 14).
Обратите внимание на зеленую пунктирную линию. Она соответствует уровню срабатывания триггера. Покрутите ручку LEVEL в блоке TRIGGER, и посмотрите, как этот уровень влияет на отображение осциллограммы.
А как узнать, что происходит с задними фронтами импульсов?
Просто переключите триггер на срабатывание по спадающему фронту, и вы убедитесь, что задние фронты импульсов тоже далеко не идеальные (рис. 15).
Одна клетка по горизонтали соответствует интервалу времени 40 нс. Таким образом, сигналы на контактах micro:bit меняют свое состояние примерно за 60 нс.
Конечно, если речь идет об управлении двигателями или светодиодами, такими временами можно запросто пренебречь. Однако теперь с помощью триггера и масштабирования вы можете легко увидеть, как эти фронты выглядят на самом деле. При подключении нагрузки к выходам микроконтроллера время нарастания и спада может измениться.
Итак, теперь вы умеете пользоваться триггером и выбирать, какой фронт осциллограммы будет использован для начала показа данных на экране осциллографа. Попробуйте повторить эти действия для входа CH2, изменив кнопкой F2 в меню Source источник получения данных для триггера.
Меню триггера можно убрать с экрана кнопкой F0.
Подключаем логический анализатор
Все вроде бы хорошо, но есть одна проблема. Мы видим сигналы P0 и P1, но не видим, что происходит на контакте P2. Конечно, можно переключить, например, щуп CH2 с контакта P1 на P2, однако при этом пропадет возможность контролировать состояние контакта P1.
Осциллограф Hantek MSO5202D оборудован простым логическим анализатором, позволяющим отслеживать состояние до 16 цифровых сигналов. Давайте воспользуемся этим, и подключим входы логического анализатора D0, D1 и D2 к контактам P0, P1 и P2 нашего микроконтроллера.
Для включения анализатора нажмите на осциллографе два раза кнопку F7.
Вам предстанет довольно неприглядная картина — осциллограммы аналоговых входов CH1 и CH2 будут мешать просмотру данных логического анализатора (рис. 16).
Видно, что осциллограммы контактов P0, P1 и P2 micro:bit находятся в нижней части экрана. Таким образом, мы задействовали только три из 16 каналов логического анализатора.
Если вам нужны все 16 каналов, отключите аналоговые входы с помощью кнопок CH1 MENU и CH2 MENU. Однако нам интереснее увидеть два аналоговых сигнала с контактов P0 и P1, а также сигналы со всех трех контактов на логическом анализаторе.
Давайте выполним настройку логического анализатора с помощью меню LA.
Если нажать на панели осциллографа кнопку F2, откроется меню D15-D8, управляющая одноименными каналами анализатора. Нажмите здесь еще раз кнопку F2, и на экране останутся осциллограммы только каналов D0-D7. Нажмите кнопку F6, чтобы вернуться в меню LA.
Обратите внимание на меню Threshold, которое активируется по кнопке F4. Здесь с помощью ручки V0 можно выбрать порог срабатывания входов анализатора (триггеров анализатора). Для нашего микрокомпьютера подойдут уровни TTL или CMOS, но не ECL (там используется отрицательное напряжение). При необходимости можно выбрать режим User, чтобы задать порог срабатывания в вольтах вручную, вращая ручку V0.
Теперь, когда мы отключили показ на экране ненужных нам сейчас каналов D8-D15, верхняя часть экрана расчистилась. Вращая ручки POSITION и VOLTS/DIV, добейтесь, чтобы осциллограммы каналов CH1 и CH2 находились в верхней части экрана.
Откройте снова меню триггера TRIG MENU. Нажав кнопку F2, можно выбрать для триггера не только один из двух аналоговых каналов, но и любой из каналов цифрового анализатора. На рис. 17 мы показали результат настройки триггера на срабатывание по нарастающему фронту от канала D2, подключенного к контакту P2 микрокомпьютера.
Проверяем работу сонара HY-SRF04
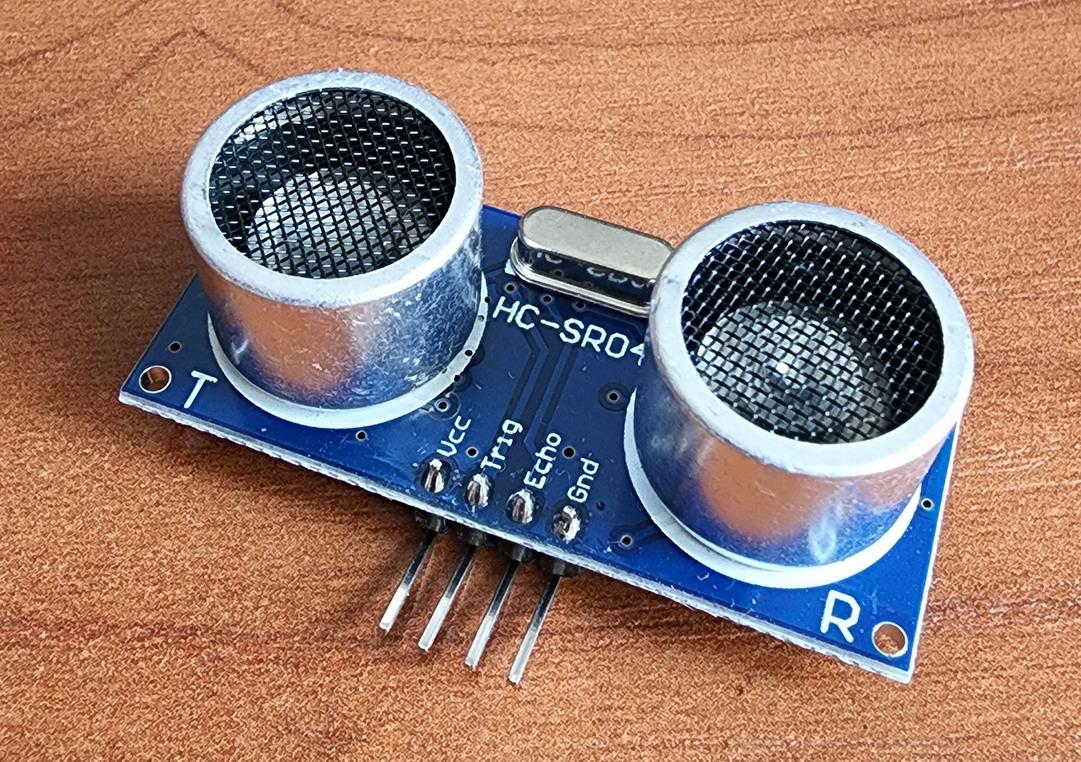
Ультразвуковой сонар HY-SRF04 (рис. 18) позволяет измеряет расстояние в диапазоне от 3 см до 3 метров и широко используется при создании моделей роботов, вездеходов и тому подобных устройств.
Собираем стенд для проверки сонара
Для питания сонара нужно напряжение 4.5–5 В, например, три последовательно соединенные батарейки АА или ААА. К сожалению, вывод 3V микрокомпьютера micro:bit для питания сонара не подойдет, так как там слишком низкое напряжение.
Питающее напряжение нужно подавать на контакт Vcc сонара. При этом контакт Gnd, а также «минус» источника питания сонара нужно соединить с землей micro:bit.
Собирая стенд, подключите контакт Trig сонара к выводу P0, а контакт Echo — к выводу P1 микрокомпьютера. Первый из этих контактов запускает отправку ультразвуковых сигналов, а второй служит для получения отраженных эхоимпульсов.
Щуп канала CH1 осциллографа подключите к контакту P0, а щуп канала CH2 — к контакту P1 микрокомпьютера (рис. 19).
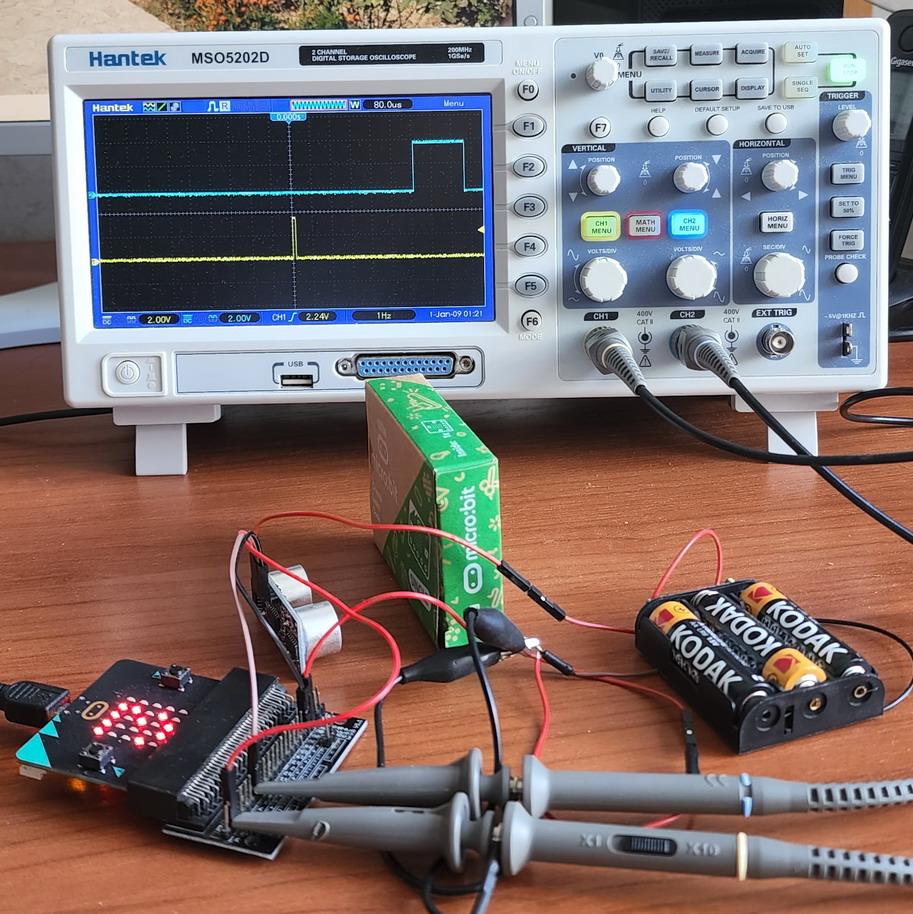
Напротив сонара мы положили на стол коробочку зеленого цвета от micro:bit. Передвигая ее, можно изменять расстояние между сонаром и препятствием.
Программа измерения расстояния для micro:bit
Чтобы проверить сонар в работе, мы подготовили очень простую программу microbit-sonar.hex (рис. 20).

Эта программа в бесконечном цикле постоянно вызывает блок ping trig, который появится в проекте Microsoft MakeCode после установки расширения Sonar. После вызова блока показать число в работе программы создается задержка на 100 мс.
Блок ping trig возвращает расстояние от сонара до препятствия в сантиметрах, которое выводится на монитор micro:bit.
Смотрим импульсы отраженного сигнала
Настройте триггер осциллографа так, чтобы он срабатывал по нарастающему фронту канала CH2, то есть по переднему фронту отраженного сигнала с контакта Echo.
На экране осциллографа вы увидите короткий импульс отправки ультразвукового сигнала на канале CH1, а также импульс отраженного сигнала на канале CH2 (рис. 21).
Изменяя расстояние между сонаром и препятствием, наблюдайте изменение длительности отраженного импульса.
Измерение длительности импульса
Длительность отраженного импульса можно оценить с помощью координатной сетки на экране осциллографа. Например, на рис. 21 одна клетка соответствует 80 мс, а длина импульса составляет почти три клетки. Получается, что длительности импульса немного меньше 240 мс.
Но можно ли измерить длину этого импульса точнее? Да, и в этом нам поможет режим курсора осциллографа.
Нажмите кнопку CURSOR и кнопкой F1 выберите режим Time. В меню Source при этом кнопкой F2 нужно выбрать канал отраженного сигнала CH2 (рис. 22).
Нажав кнопку F4, выберите в меню Select cursor курсор S. Вращая ручку V0, переместите вертикальную пунктирную линию к переднему фронту импульса. Затем выберите курсор E, и ручкой V0 переместите линию курсора к заднему фронту импульса.
После этого в правом нижнем углу экрана вы увидите точное значение длительности импульса, в нашем случае это 220 мс.
В расширении Sonar для получения расстояния в сантиметрах длительность импульса в микросекундах делится на 58. Выполнив эту нехитрую операцию, вы сможете проверить значение расстояния, которая ваша программа показывает на мониторе микрокомпьютера и сравнить с измеренным при помощи осциллографа значением.
Сегодня остановимся на этом. В следующий раз исследуем сигналы управления сервоприводом и данные протокола I2C, а также измерим шумы и пульсации в цепях электропитания.
НЛО прилетело и оставило здесь промокод для читателей нашего блога:
— 15% на все тарифы VDS (кроме тарифа Прогрев) — HABRFIRSTVDS.
Как проверить шим контроллер осциллографом
Шим-контроллер – это электронное устройство, отвечающее за генерацию и управление широтно-импульсной модуляцией в электронных системах. Основной его функцией является регулировка ширины импульсов ШИМ-сигнала, который используется для управления мощностью в различных схемах и устройствах.
Однако, чтобы убедиться в надежности и стабильности работы шим-контроллера, необходимо провести его проверку с использованием осциллографа. Процесс проверки является важным и позволяет выявить возможные неисправности или неполадки в работе шим-контроллера.
Для проведения проверки шим-контроллера осциллографом, необходимо выполнить ряд последовательных действий. Во-первых, подключите осциллограф к выходу шим-контроллера. Убедитесь, что подключение осциллографа к контроллеру выполнено правильно и оборудование работает нормально.
Далее, перейдите к настройке осциллографа. Установите горизонтальную и вертикальную шкалу в удобный для анализа диапазон. Затем, установите уровень синхронизации осциллографа на уровень сигнала ШИМ-контроллера. При помощи различных настроек осциллографа можно уловить даже самые мелкие изменения в сигнале, что позволит более точно определить его достоверность.
Важно отметить, что при проверке шим-контроллера осциллографом необходимо обращать внимание на целостность сигнала: его частоту, амплитуду, форму и так далее. Также рекомендуется проанализировать синхронизацию сигнала с другими системами и провести сравнение с эталонным шим-сигналом.
Как провести проверку шим контроллера осциллографом?
Вот пошаговая инструкция, как провести проверку шим контроллера осциллографом:
Шаг 1:
Подключите свой осциллограф к шим контроллеру. Подсоедините зонды к выводам шим контроллера, которые предназначены для измерения сигнала.
Шаг 2:
Включите осциллограф и установите режим измерения сигнала.
Шаг 3:
Настройте осциллограф на определение формы и временных параметров сигнала. Установите горизонтальную шкалу времени и вертикальную шкалу напряжения, чтобы охватить весь сигнал шим контроллера.
Шаг 4:
Запустите двигатель или другую нагрузку, контролируемую шим контроллером. Установите желаемое значение скважности ШИМ сигнала и соберите данные на осциллографе.
Шаг 5:
Анализируйте полученные данные. Проверьте, что сигнал шим контроллера имеет правильную форму и амплитуду в соответствии с настройками контроллера. Просмотрите данные на предмет наличия помех или смещения.
Таким образом, проведение проверки шим контроллера осциллографом позволяет убедиться в его правильной работе и обнаружить любые проблемы или несоответствия в сигнале. Если вы замечаете какие-либо аномалии, то возможно потребуется настройка или замена шим контроллера.
Подготовка осциллографа и оборудования к проверке
Перед началом проверки шим контроллера с помощью осциллографа необходимо правильно подготовить оборудование. Следуйте следующей инструкции:
1. Подключите осциллограф к источнику питания.
Убедитесь, что осциллограф подключен к источнику питания с помощью соответствующего кабеля или адаптера. Проверьте, что все соединения надежно закреплены и не вызывают никаких замыканий или перекосов.
2. Подключите осциллограф к шим контроллеру.
Соедините каналы осциллографа с выходами шим контроллера, которые необходимо проверить. Убедитесь, что соединения выполнены правильно и сигналы не перепутаны.
3. Проверьте настройки осциллографа.
Прежде чем начать измерения, убедитесь, что осциллограф правильно настроен. Проверьте такие параметры, как масштаб по горизонтали и вертикали, частота дискретизации, уровень синхронизации и другие настройки, которые могут повлиять на результаты измерений.
4. Подготовьте образец сигнала для проверки.
Создайте образец сигнала, который будет подан на шим контроллер. Это может быть сигнал с генератора функций или другого источника. Убедитесь, что образец сигнала соответствует требуемым характеристикам и является представительным для проверки шим контроллера.
5. Запустите осциллограф и начните измерения.
Запустите осциллограф и начните измерения сигнала, подаваемого на шим контроллер. Убедитесь, что сигнал отображается на экране осциллографа и соответствует ожидаемым характеристикам.
Следуя этой подробной инструкции, вы сможете правильно подготовить осциллограф и оборудование к проверке шим контроллера. Это поможет вам получить достоверные результаты и улучшить качество вашей работы.
Подключение осциллографа и настройка параметров
Для проверки шим контроллера при помощи осциллографа необходимо правильно подключить прибор и настроить его параметры. Вот пошаговая инструкция, как это сделать:
- Включите осциллограф и подождите, пока он полностью загрузится.
- Получите доступ к сигналу шим контроллера, с которым вы планируете работать. Обычно это является выходной сигнал управления, который может быть подключен к выводу контроллера, микросхеме или проводу.
- Подключите канал осциллографа к выбранному сигналу. Для этого используйте соответствующие зажимы или зонды.
- Установите режим осциллографа в режим «Single» (единичный) или «Normal» (нормальный) для более точной и устойчивой визуализации сигнала.
- Настройте горизонтальную ось времени, чтобы увидеть необходимое количество периодов сигнала.
- Настройте вертикальную ось напряжения, чтобы сигнал полностью помещался на экране и был виден с достаточной ясностью.
- Проверьте наличие активного шим сигнала на экране. Обратите внимание на его форму, амплитуду, частоту и другие параметры.
- Если требуется, используйте функции автоматической настройки осциллографа для улучшения визуализации сигнала или для получения более точных измерений.
- Проанализируйте полученные данные, сравнив их с ожидаемыми значениями или с требованиями вашего проекта. Обратите внимание на любые аномалии, шумы или неполадки, которые могут указывать на проблемы в работе шим контроллера.
Следуя этой инструкции, вы сможете правильно подключить осциллограф и настроить его параметры для проверки шим контроллера. Не забывайте про безопасность и правильную обработку прибора во время работы.
Получение сигнала шим контроллера и анализ данных
Для проверки шим контроллера с помощью осциллографа необходимо следовать определенной последовательности действий. В данном разделе мы рассмотрим процесс получения сигнала шим контроллера и анализ данных.
Шаг 1: Подключите осциллограф к выходу шим контроллера. Для этого используйте соответствующие кабели и разъемы.
Шаг 2: Включите осциллограф и установите необходимые параметры: режим работы, частоту дискретизации, определение временных интервалов и т.д. При необходимости прокалибруйте устройство.
Шаг 3: Запустите шим контроллер и начните сбор данных с осциллографа. Удостоверьтесь, что вы получаете стабильный сигнал шим контроллера.
Шаг 4: Анализируйте данные на осциллографе. Оцените значения амплитуды, частоты и длительности импульсов шим контроллера. Проверьте, что значения соответствуют заданным параметрам.
Шаг 5: Проведите сравнительный анализ полученных данных с требованиями документации шим контроллера. Убедитесь, что сигнал шим контроллера соответствует спецификации.
Шаг 6: При необходимости проведите дополнительные измерения и анализы для проверки работы шим контроллера. Учтите, что результаты могут зависеть от условий эксплуатации и конкретных требований проекта.
Получение сигнала шим контроллера и анализ данных с помощью осциллографа позволяет проверить правильность работы устройства и убедиться в его соответствии спецификации. Это важный этап в разработке и тестировании электронных устройств.
Оценка результатов и рекомендации по настройке шим контроллера
После проведения проверки шим контроллера осциллографом, необходимо оценить полученные результаты и, при необходимости, внести корректировки в настройку шим контроллера. Вот некоторые рекомендации, которые помогут вам в этом процессе:
1. Анализ сигнала на осциллографе:
Используйте осциллограф для подробного анализа сигнала шим контроллера. Проверьте форму и частоту сигнала, а также настройки длительности импульсов и их ширины. Если обнаружены аномалии, измерьте значения и сравните их с требованиями вашего проекта.
2. Проведение статического теста:
Приложите статическую нагрузку к вашему шим контроллеру и проверьте его реакцию на изменение нагрузки. Наблюдайте сигнал шим контроллера на осциллографе и убедитесь, что он удерживает заданные параметры независимо от изменений нагрузки.
3. Реакция на динамические изменения:
Проверьте работу шим контроллера при динамических изменениях нагрузки. Измените нагрузку и наблюдайте реакцию шим контроллера на осциллографе. Убедитесь, что сигнал шим контроллера стабилен и отвечает требованиям проекта.
4. Корректировка настроек шим контроллера:
Если в результате проверки вы обнаружили какие-либо неполадки или отклонения от требований, выполните соответствующие корректировки настроек шим контроллера. Если у вас возникли сложности с установкой определенных параметров, обратитесь к документации или к производителю контроллера для получения дополнительной информации.
После настройки шим контроллера повторно проведите проверку осциллографом, чтобы убедиться, что все изменения были внесены правильно и что сигнал шим контроллера отвечает требованиям вашего проекта.
Помните, что правильная настройка шим контроллера является важным звеном в работе вашей системы и поможет достичь стабильности и эффективности ее работы.
Блог

Наши статьи по электронике — это не только знакомство с новыми электронными схемами, но и нужные советы, а также теоретическая информация.
В рамках этой статьи, мы с вами поговорим о ШИМ, то есть определенном способе управления электронными элементами, с которым вы будете встречаться очень часто.
ШИМ — что это такое?
Краткое сокращение PWM (ШИМ) известно практически каждому, кто имел дело с электродвигателями или моделированием. ШИМ, от английского PWM (pulse width modulation) переводится как Широтно-Импульсная Модуляция. Звучит умно, но что это на самом деле означает? Проверим на практике!
Начнем сразу с простого упражнения. На этот раз нам понадобятся:
- 1 × 1000 мкФ конденсатор,
- Резистор 1 × 10 кОм,
- Резистор 1 × 330 Ом,
- 1 × светодиод (выберите свой любимый цвет),
- 1 × микровыключатель,
- Батарея 4 × AA,
- 1 × корзина для 4 батареек АА,
- 1 × макетная плата,
- комплект соединительных проводов.
На макетную плату монтируем очень простую схему. Здесь ничего сложного для вас не должно быть, просто нужно помнить о правильной полярности электролитического конденсатора.

На практике, сборка на плате может выглядеть так:
 |
 |
| Схема сборки на макетной плате | Реализация на практике |
Если конденсатор разряжен, при включении питания ничего не должно произойти. После нажатия на кнопку, диод начнет медленно светиться, а через некоторое время «засветится на полную мощность». Это связано с тем, что после нажатия кнопки, конденсатор С1 медленно заряжается, и только после его зарядки весь ток начнет перетекать на диод. Когда вы отпускаете кнопку, диод медленно погаснет. Это связано с тем, что при отключении от батареи, светодиод питается только от заряженного конденсатора.
Итак, у нас есть схема, которая медленно увеличивает яркость, и также медленно гасит диод. А что произойдет, если мы будем несколько раз нажимать и отпускать кнопку так, чтобы каждое состояние длилось около полсекунды? Проверьте это на практике! Также посмотрите, что произойдет, если вы увеличите это время. Это будет непросто, но если вам удастся поддерживать по времени регулярное нажатие, светодиод должен будет гореть все время, только не на всю мощь.
Такое равномерное нажатие и отпускание кнопки приводит к тому, что напряжение приходит в схему в виде следующего прямоугольного сигнала, где:

- X — время подачи напряжения в систему,
- T — время одного цикла / периода.
Зажигание светодиода происходит тогда, когда вы нажимаете кнопку и конденсатор заряжается энергией от аккумулятора. После отключения питания, диод отключается, потому что он питается только энергией, накопленной в конденсаторе, которая довольно быстро заканчивается. Если конденсатор заряжается и разряжается достаточно часто, напряжение достигает определенного значения и изменяется незначительно (пульсации диода практически не видны).
| Чем дольше эти фазы длятся, тем пульсации становятся заметнее, поскольку изменения напряжения на конденсаторе уже значительны. |
Если мы нажимаем кнопку через регулярные промежутки времени, мы генерируем прямоугольную волну, как на предыдущем графике. Конечно, время нажатия кнопки и время отсутствия тока в цепи не обязательно должны совпадать.
| Отношение времени нажатия кнопки к периоду сигнала называется рабочим циклом. |

Этот эксперимент был простым. По сути, это была простая симуляция генератора ШИМ, то есть модуляция ширины сигнала. А теперь перейдем к подробному обсуждению темы.
Для чего используется ШИМ?
Как вы, возможно, уже знаете, микроконтроллеры (например, Arduino) представляют собой цифровые схемы. Это означает, что обрабатываемые ими сигналы представляют собой только логические единицы и нули, а с точки зрения электроники выглядят так:
- логический ноль — это отсутствие напряжения,
- логическая единица — это напряжение питания системы (например, 3,3 В или 5 В).
Если цифровая схема может работать только с нулями и единицами, то возникает вопрос: как плавно регулировать яркость диода, ведь на выходе может появиться только одно из двух напряжений (то есть 0 В или 5 В)? Вот здесь ШИМ придет нам на помощь.
Управлять диодом очень просто — все, что нам нужно, это резистор и сам диод, нам даже не нужен конденсатор. В предыдущем примере это было необходимо по другой причине — без него светодиод погаснет, как только кнопка будет отпущена, поэтому мы увидим, как светодиод будет мигать.
Однако, если мы будем использовать возможности микроконтроллера для включения и выключения диода, вместо того, чтобы нажимать кнопку вручную, мы сможем управлять диодом намного быстрее и с гораздо большей частотой. Человеческое зрение несовершенно, и уже при 24 Гц (т.е. 24 изменения в секунду) глаз перестает видеть следующие фазы мигания и усредняет результат — мы знаем это из кино и телевидения!
Читать также: Пассивные RC-фильтры низких частот
| Конечно, такая низкая частота не дает идеального изображения, поэтому лучше использовать более высокую частоту обновления (например, 50 Гц или 100 Гц). |
Для современных процессоров с тактовой частотой в гигагерцах, такие частоты очень низкие — но для нашего очень несовершенного зрения их более чем достаточно.
Зачем нужен был конденсатор?
Вернемся еще раз к нашему примеру с конденсатором — чем может быть полезна такая схема? Как мы знаем, для управления диодом конденсатор не нужен, наш глаз усредняет эффект свечения диода. Именно конденсатор можно использовать на практике для усреднения напряжения. Правильно подобрав номинал конденсатора (и резисторов), на его выводах мы получили бы напряжение (почти) постоянное, плавно регулируемое в диапазоне 0–6 В в зависимости от заполнения ШИМ-сигнала.
В случае микропроцессора, такая схема очень популярна для получения плавно регулируемого выходного напряжения. В то время как сам процессор может обеспечивать напряжение только 0 В и, скажем, 5 В, управляя с помощью ШИМ и подключая резистор и конденсатор, мы можем получить любое напряжение в диапазоне 0-5 В на выходе схемы.
| Комбинация резистора и конденсатора создает простой фильтр. Именно благодаря ему, вместо скачков напряжения мы можем наблюдать его среднее значение. |
Вы можете легко проверить это самостоятельно, подключив мультиметр к выводам конденсатора емкостью 1000 мкФ. Быстро нажмите кнопку и посмотрите, что покажет мультиметр. Вместо 6 В, которые мы используем для питания нашей системы, мы будем видеть, например, 1,7 В. На конденсаторе значение этого напряжения будет меняться по мере «заполнения» сигнала, управляющего схемой — в данном случае это означает, что чем дольше нажата кнопка (время, когда она не нажата), тем выше будет напряжение на конденсаторе.
Но вы не можете использовать такую простую схему для прямого питания цепи, потребляющей значительный ток. Чтобы такая схема заработала, необходимо усилить ток, например, с помощью транзистора или операционного усилителя.
Использование ШИМ для передачи информации
Оказывается, ШИМ можно использовать и для передачи сигналов между устройствами. Одна из самых известных схем этого типа является сервопривод. Это небольшой мотор, который может вращаться в диапазоне (чаще всего) от 0 ° до 180 °. С помощью прогрммирования, мы можем «приказать» ему занять определенное положение, например, 45 °.
| Точность такого позиционирования невысока, но ее достаточно для большинства приложений. |
Такое управление возможно, потому что сервопривод имеет встроенный контроллер двигателя — обычно аналоговый, но он также может быть оснащен более сложной цифровой схемой (так называемый цифровой сервопривод). В обоих случаях, в качестве управляющего сигнала используется ШИМ — контроллер устанавливает положение рычага сервопривода в зависимости от ширины подаваемого импульса.

Типичный сигнал сервоуправления должен длиться 20 мс, а ширина импульса должна варьироваться от 1 мс до 2 мс. Встроенный контроллер интерпретирует сигнал таким образом, что устанавливает рупор (элемент, прикрепленный к оси) пропорционально длительности импульса. Например, импульс длительностью 1 мс крайний левый угол, импульс 1,5 мс — центр сервопривода, а 2 мс — крайний правый угол.

Мы будем использовать включенный сервопривод, как только сможем сгенерировать настоящий ШИМ-сигнал (здесь уже недостаточно просто нажимать кнопку). Однако сначала мы должны познакомиться с интегральной схемой — в частности, речь идет о NE555.

Стабилизаторы импульсов
Сигнал ШИМ тоже связан с совершенно другим типом элементов, а именно с импульсными стабилизаторами. В первых статьях по электронике мы уже обсуждали популярные линейные стабилизаторы . Бессмертным примером здесь, который должен быть известен каждому электронщику, является LM7805.

Эти элементы дешевы и просты в использовании. Однако у них есть большой недостаток — низкая эффективность. Если мы используем такой стабилизатор для питания, например, двигателя, он будет действовать как «резистор». Предположим, у нас есть источник питания, который дает нам 10 В, мы хотели бы использовать его для питания двигателя, которому требуется 5 В. Для этой цели (потому что мы еще не узнали о лучших методах), мы могли бы использовать линейный стабилизатор.

В показанной схеме, ток, протекающий через стабилизатор и двигатель, будет одинаковым (двигатель питается от стабилизатора). При этом игнорируем ток, потребляемый самим стабилизатором, потому что в этом случае он будет небольшим (даже незначительным).
Читать также: Электроника для детей — светодиоды

Мощность выражается как произведение протекающего тока и накопленного напряжения, поэтому давайте посчитаем пример баланса. Пусть наш мотор потребляет 200 мА тока. Затем рассчитываем мощность, потребляемую двигателем, следующим образом:
P мот = I ⋅ U мот = 0,2 A ⋅ 5 В = 1 Вт
Посчитаем, какая мощность потребляется от источника питания:
P бат = I ⋅ U бат = 0,2 А ⋅ 10 В = 2 Вт
Как мы видим, в распоряжении двигателя половина мощности, получаемой от аккумуляторной батареи. Остальное теряется в виде тепла, вот почему LM7805 нагревается, а батарея быстро разряжается. Конечно, настоящий двигатель может потреблять больше электроэнергии, но тогда потеря мощности будет настолько велика, что наш LM7805 придется охлаждать жидким азотом для его правильной работы…
| В таком случае, стабилизатор превратит ценную энергию, хранящуюся в батарее, в бесполезное тепло. Поэтому это решение не самое лучшее. |
Однако есть такой элемент, как импульсный стабилизатор. Он работает по другому принципу — похожему на наш эксперимент со светодиодом и конденсатором. В данном случае транзисторный ключ, встроенный в импульсный стабилизатор, действует как переключатель и либо передает полное напряжение питания на другую часть схемы, либо полностью отключает его.

Благодаря этому, потери мощности на стабилизаторе очень малы и почти вся мощность передается дальше по схеме. Конечно, такое напряжение нельзя передать напрямую на приемник, например, на микроконтроллер. Нам еще предстоит их отфильтровать — мы уже знакомы с RC-фильтром. В импульсных стабилизаторах используются более совершенные фильтры, оснащенные катушкой, которая играет аналогичную роль, на этот раз сглаживая форму волны тока (а не напряжения), и обеспечивает выходной ток стабилизатора даже во время периодов отключения ШИМ .
При соответствующей частоте и наполнении сигнала (как показано на диаграмме выше) к нашему двигателю будет поступать среднее напряжение 5 В. Работа импульсных стабилизаторов и, в частности, импульсных преобразователей будет обсуждаться в отдельной статье. А пока достаточно вспомнить, что замена линейного стабилизатора на импульсный позволяет существенно повысить КПД схемы.
| В обсуждаемом примере, линейный стабилизатор обеспечит реальный КПД ниже 50%, в то время как использование импульсного стабилизатора позволит достичь КПД, близкого к 100%. |
Питание двигателей от ШИМ
Создание импульсного источника питания и даже использование импульсных стабилизаторов — сложная задача. В простейшем случае, необходимо использовать интегральную схему и ряд вспомогательных компонентов (диоды, транзисторы, катушки и т.д.).
Однако оказывается, что в случае двигателей постоянного тока, схему можно упростить — обмотка двигателя имеет определенную, часто весьма значительную, индуктивность. Благодаря этому, можно напрямую управлять с помощью сигнала ШИМ — сама обмотка будет действовать как фильтр, сглаживающий волну тока.
| Именно из-за индуктивности обмоток необходимо подключать защитные диоды всякий раз, когда мы управляем двигателями или реле. |
Тема управления двигателем очень обширна, но, к сожалению, мы не можем описать ее более подробно в данной статье. Однако стоит упомянуть, что существуют готовые интегральные схемы, которые можно использовать для управления двигателями постоянного тока. Такой системой можно дополнительно управлять с помощью ШИМ-сигнала для регулирования оборотов двигателя.
Примером может служить старый, но проверенный L293D. К соответствующим выводам (ножкам) подключаем питание и сигналы управления (в том числе ШИМ), а к остальным — мотор. Изменение рабочего цикла ШИМ-сигнала, подаваемого в эту схему, напрямую влияет на изменение частоты вращения двигателя.

Что меняет частоту сигнала ШИМ?
Выполнив практическое упражнение с диодом и конденсатором, вы могли собственными глазами увидеть, что более высокая частота повторения импульсов ШИМ полезна, потому что усреднение лучше. Так должны ли мы всегда использовать максимально возможную частоту?
- каждое переключение порождает потери,
- некоторые потребители электроэнергии плохо реагируют на слишком высокую частоту.
К сожалению, первый пункт применим всегда. Это связано с тем, что переключение (т.е. выключение и включение) происходит не сразу. Ограничением являются свойства самих транзисторов , используемые для управления источником питания приемника.
| Раньше прямоугольный сигнал рисовался с острыми вертикальными краями, но на самом деле такую форму получить невозможно. |
Время, которое должно пройти во время изменения напряжения, не равно нулю. Ход спусков может быть самым разным. Чаще всего он напоминает прямую линию. Однако более внимательный анализ покажет наличие округлых фрагментов у основания и вершины такого «прямоугольника».
Напряжение, которым питается наш образец приемника, мы обозначили зеленым цветом. Здесь мы предположили, что наклоны линейные, т.е. форма импульса напряжения трапециевидная. Эта ситуация определенно преувеличена (длительное время переключения по сравнению со всем периодом), но она хорошо иллюстрирует данную картину.
Читать также: Электроника для детей — семисегментный светодиодный дисплей

| Фактически, прямоугольный сигнал может быть еще более искаженным. Однако на данный момент, наиболее интересным является время нарастания и спада сигнала. |
Здесь стоит отметить, что каждая точка наклона напоминает ситуацию с ресивером и линейным стабилизатором — напряжение, которое не складывается на двигателе в данный момент, должно прикладываться к стабилизатору, создавая таким образом потери.
Здесь точно также, за исключением того, что распределение этих напряжений непостоянно (меняется при переключении). Красные треугольники показывают потери в результате того, что сумма напряжений на ключе и приемнике всегда должна быть равна напряжению питания.

Один период прямоугольного сигнала в секунду требует две операции переключения (включения и выключения). Десять периодов, уже требуют двадцать переключений в секунду. Тысяча периодов — две тысячи и т.д.
| Взаимосвязь интуитивно понятна: чем чаще приходится переключаться, тем больше потери. |
Помните, что частота и время переключения (нарастание или спад) не зависят друг от друга: мы можем влиять на частоту, например, написав подходящую программу для микроконтроллера. В свою очередь, последний параметр имеет небольшое влияние и является результатом электрических свойств схемы.
Итак, у нас есть два противоположных мнения. Во-первых, частота должна быть как можно более высокой из-за эффекта усреднения. Во-вторых, вы должны минимизировать потери, и тем самым снизить частоту до минимума. Искусство проектирования схем — это умение идти на компромиссы. Таким образом, мы должны выбрать такую частоту, чтобы, с одной стороны, получить стабильное среднее значение, а с другой — оставаться на приемлемом уровне потерь мощности.
Как выбрать частоту?
Прежде всего, мы должны научиться искать нужную документацию об элементах и находить правильные решения. Если наш проект основан на интегральной схеме или готовом контроллере, то частота ШИМ, или хотя бы ее диапазон, часто навязывается (предлагается) производителем. Например, для сервоприводов нам нужно 20 мс, что соответствует частоте 50 Гц.
В случае двигателей, выбираются гораздо более высокие частоты — от сотен герц до сверхакустических частот, то есть выше 20 кГц. В общем, проще построить контроллер, работающий на более низких частотах, но к сожалению, недостатком может быть отчетливо слышимый «писк» двигателя.
| Выход за пределы акустической частоты снижает этот неприятный эффект. |
Конечно, этот метод сопоставления не идеален, так как лучше всего рассчитать подходящую частоту. Для этого вам понадобится немного больше опыта. Придется изучить множество теорий, но вы можете подсчитать, например, параметры фильтра, вместо того, чтобы выбирать их случайным образом.
ШИМ на практике
В этой статье, для работы сигнала ШИМ, мы использовали кнопку, нажимаемую вручную. Конечно, если мы построим схему, требующую такого контроля, никто не будет стоять и все время щелкать переключателями. Сигналы ШИМ чаще всего генерируются с помощью цифровых схем.
В следующих статьях мы будем использовать для этой цели очень популярный чип NE555. Если вы решили получше изучить этот вопрос (а оно того действительно стоит!), приступайте к программированию, например, на Arduino. Микроконтроллер будет выполнять функцию генератора, и вы сможете программно установить все параметры ШИМ.
Сигнал ШИМ, отображаемый на осциллографе
Конечно, как вы могли догадаться, диаграммы в этом тексте были нарисованы, чтобы хорошо проиллюстрировать приведенные примеры. Однако при тестировании встроенных устройств, иногда может потребоваться измерить параметры фактического ШИМ и построить реальный график.
Здесь (опять же) на помощь приходит осциллограф, то есть измерительный прибор, позволяющий визуализировать изменения напряжения во времени. Пример сигнала ШИМ, отображаемого осциллографом, показан ниже. Вы можете увидеть сигнал с частотой 20,2 кГц, где высокое состояние длится 14,6 мкс, а низкое состояние — 34,8 мкс. Это означает, что период сигнала составляет 49,4 мкс, а его рабочий цикл составляет 14,6 / 49,4, т.е. ~ 30%.
| Конкретные параметры сигнала измеряются осциллографом и отображаются прямо на экране. |

Вывод
Эта статья получилась немного более теоретической, но в следующих статьях вы обязательно узнаете, как самостоятельно сгенерировать настоящий ШИМ-сигнал и как применить его на практике. На данный момент самое важное — связать сигнал ШИМ с прямоугольным сигналом с переменным заполнением, которое можно использовать для предоставления или переноса информации.
С Уважением, МониторБанк