Раздел 3. Электрические машины.
1) Основные определения и сведения об электрических машинах.
Электрическая машина— это устройство, предназначенное для взаимного преобразования механической и электрической энергий.
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Наиболее широкое применение нашли трехфазные синхронные и асинхронные машины, а также коллекторные машины переменного тока, которые допускают экономичное регулирование частоты вращения в широких пределах.
Электрические машины преобразуют механическую энергию в электрическую и наоборот.
Электрическая машина, преобразующая механическую энергию в электрическую энергию, называется электрическим генератором.
Электрическая машина, преобразующая электрическую энергию в механическую энергию, называется электрическим двигателем.
Электрическая машина имеет две основные части — вращающуюся, называемую ротором, и неподвижную, называемую статором (рис. 1).

Рис. 1. Обычная конструктивная схема электрической машины,
1 — статор; 2 — ротор; 3 — подшипники.
Принцип действия электрической машины.
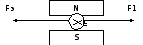
Принцип действия электрической машины основан на физических законах электромагнитной индукции и электромагнитных сил. Есть два полюса электромагнита, создающего магнитное поле. В магнитном поле между полюсами помещен проводник. Если этот проводник передвигать с силой F1, то в нем согласно закону электромагнитной индукции возникнет э.д.сE.
Если концы проводника замкнуты на внешнее сопротивление, то по нему пойдет ток.
В результате взаимодействия тока i в проводнике и поля возникнет электромагнитная сила Fэ. Получается, что дан. ЭМ будет являться генератором.
Та же элементарная машина может работать двигателем, т. е. преобразовывать электрическую энергию в механическую. Подведем к проводнику напряжение u , чтобы появился ток i в проводнике. При этом возникнет электромагнитная сила, которая заставит проводник передвигаться.
Если вращать вал электрической машины, то на зажимах ее электрической обмотки создается разность электрических потенциалов, а при подключенном электроприемнике возникает электрический ток. Таким образом эта машина преобразует механическую энергию в электрическую, т.е. является генератором электроэнергии. С другой стороны, если электрическую обмотку этой машины подключить к источнику электроэнергии, то в результате происходящих в ней процессов создается электромагнитный вращающий момент, под действием которого вал машины вращается и вращает приводной механизм.
Основные принципы ЭМ:
1. Электрическая машина обратима, т. е. может работать и генератором и двигателем.
2. Наличие магнитного поля и проводников, по которым проходит ток, является необходимым условием для работы любой электрической машины. Для усиления магнитного поля применяются ферромагнитные материалы в виде сталей.
2) Классификация электрических машин.
1. По роду тока — в зависимости от того, какой ток они генерируют или потребляют:
постоянного тока, переменного тока, однофазные, многофазные (чаще всего трехфазные).
2. По назначению (двигатели, генераторы, преобразователи частоты, датчики и т.д.).
3. По соотношению скорости вращения ротора и магнитного поля статора (асинхронные и синхронные)
В тех и других машинах при их работе возникает вращающееся магнитное поле. Ротор синхронной машины вращается со скоростью, равной скорости вращения магнитного поля. Скорость вращения ротора асинхронной машины отличается от скорости вращения поля.
4. По конструктивному исполнению:
а) по способу крепления (на лапах, фланцах, выносных подшипниковых стойках);
б) по способу защиты от окружающей среды (открытые, защищенные, закрытые, взрывобезопасны и т.д.);
в) по способу охлаждения (естественное, принудительное, воздушное, водородное).
7 Электрические машины
Электрическая машина — электромагнитное устройство, состоящее из статора и ротора, и преобразующее механическую энергию в электрическую (генераторы) или электрическую в механическую (электрические двигатели).
Принцип действия электрических машин основан на законах электромагнитной индукции, Ампера и явлении вращающегося магнитного поля.

Согласно закону электромагнитной индукции, открытому М. Фарадеем в 1831 г, в проводнике, помещенном в магнитное поле и движущемся относительно него со скоростьюнаводится ЭДСЕ, направление которой определяется правилом буравчика или правилом правой руки (рис.7.1).

Рисунок 7.1. — Иллюстрация к закону электромагнитной индукции (а), и закону Ампера (б)

Если проводник длинойравномерно движется перпендикулярносиловым линиям магнитного поля, то значение наводимой в проводнике ЭДС равно

(7.1)
где В – индукция магнитного поля.
Согласно закону Ампера на проводник с током I, помещенный в магнитное поле, действует сила, направление которой определяется правилом буравчика или правилом левой руки, а значение по формуле:

(7.2)
где направление тока I, магнитной индукции  и силы
и силы  взаимно перпендикулярны.
взаимно перпендикулярны.
7.2 Вращающееся магнитное поле
Важным преимуществом трехфазного тока является возможность получения вращающегося магнитного поля, лежащего в основе принципа действия электрических машин – асинхронных и синхронных двигателей трехфазного тока.

Рисунок 7.2. – Схема расположения катушек при получении вращающегося магнитного поля (а) и волновая диаграмма трехфазной симметричной системы токов, текущих по катушкам (б)
Вращающееся магнитное поле получают, пропуская трехфазную систему токов (рис.7.2,б) по трем одинаковым катушкам А, В, С (рис.7.2,а) оси которых расположены под углом 120° относительно друг друга.
На рисунке 7.2,а показаны положительные направления токов в катушках и направления индукций магнитных полей ВА, ВВ, ВС, создаваемыми каждой из катушек в отдельности.

На рисунке 7.3 показаны действительные направления токов для моментов времени и направления индукцииВрез результирующего магнитного поля, создаваемого тремя катушками.
Анализ рисунка 7.3 позволяет сделать выводы:
а) индукция Врез результирующего магнитного поля с течением времени меняет свое направление (вращается);
б) частота вращения магнитного поля такая же, как и частота изменения тока. Так, при f = 50 Гц вращающееся магнитное поле совершает пять- десять оборотов в секунду или три тысячи оборотов в минуту.
Значение индукции результирующего Врез = 1,5Bm магнитного поля постоянно:
где Bm – амплитуда индукции одной катушки.

Рисунок 7.3. – Направление индукции вращающегося магнитного поля в различные моменты времени
7.3 Асинхронные машины
7.3.1 Принцип действия асинхронного двигателя (АД). Поместим между неподвижными катушками (рис.7.4) в области вращающегося магнитного поля, укрепленный’ на оси подвижный металлический цилиндр -ротор.
Пусть магнитное поле вращается «по часовой стрелке», тогда цилиндр относительно вращающегося магнитного поля вращается в обратном направлении.
Учитывая это, по правилу правой руки найдем направление наведенных в цилиндре токов.
На рисунке 7.4 направления наведенных токов (вдоль образующих цилиндра) показаны крестиками («от нас») и точками («к нам»).
Применяя правило левой руки (рис.7.1,б) получаем, что взаимодействие наведенных токов с магнитным полем порождает силы F, приводящие во вращательное движение ротор в том же направлении, в каком вращается магнитное поле.

Частота вращения ротора меньше частоты вращения магнитного

поля , т.к. при одинаковых угловых скоростях относительная скорость ротора и вращающегося магнитного поля была бы равна нулю, и в роторе не было бы наведенных ЭДС и токов. Следовательно, не было бы сил F, создающих вращающий момент. Рассмотренное простейшее устройство поясняет принцип действия асинхронных двигателей. Слово «асинхронный» (греч.) означает неодновременный. Этим словом подчеркивается различие в частотах вращающегося магнитного поля и ротора – подвижной части двигателя.

Рисунок 7.4. — К принципу действия асинхронного двигателя
Вращающееся магнитное поле, создаваемое тремя катушками, имеет два полюса и называется двухполюсным вращающимся магнитным полем (одна фаза полюсов).
За один период синусоидального тока двухполюсное магнитное поле делает один оборот. Следовательно, при стандартной частоте f1 = 50 Гц это поле делает три тысячи оборотов в минуту. Скорость вращения ротора немногим меньше этой синхронной скорости.
В тех случаях, когда требуется асинхронный двигатель с меньшей скоростью, применяется многополюсная обмотка статора состоящая из шести, девяти и т.д. катушек. Соответственно вращающееся магнитное поле будет иметь две, три и т.д. пары полюсов.
В общем случае, если поле имеет р пар полюсов, то его скорость вращения будет

7.3.2 Устройство асинхронного двигателя. Магнитная система (магнитопровод) асинхронного двигателя состоит из двух частей: наружной неподвижной, имеющей форму полого цилиндра (рис.8.5) и внутренней — вращающегося цилиндра.
Обе части асинхронного двигателя собираются из листов электротехнической стали толщиной 0,5 мм. Эти листы для уменьшения потерь на вихревые токи изолированы друг от друга слоем лака.
Неподвижная часть машины называется статором, а вращающаяся -ротором (от латинского stare — стоять и rotate — вращаться).

1 — статор; 2 — ротор; 3 — вал; 4 — витки обмотки статора;
5 — витки обмотки ротора
Рисунок 7.5. — Схема устройства асинхронного двигателя: поперечный разрез (а); обмотка ротора(б)
В пазах с внутренней стороны статора уложена трехфазная обмотка, токи которой возбуждают вращающееся магнитное поле машины. В пазах ротора размещена вторая обмотка, токи в которой индуктируются вращающимся магнитным полем.
Магнитопровод статора заключен в массивный корпус, являющийся внешней частью машины, а магнитопровод ротора укреплен на валу.
Роторы асинхронных двигателей изготавливаются двух видов: короткозамкнутые и с контактными кольцами. Первые из них проще по устройству и чаще применяются.
Обмотка короткозамкнутого ротора представляет собой цилиндрическую клетку («беличье колесо») из медных шин или алюминиевых стержней, замкнутых накоротко на торцах двумя кольцами (рис.7.5,б). Стержни этой обмотки вставляются без изоляции в пазы магнитопровода.
Применяется также способ заливки пазов магнитопровода ротора расплавленным алюминием с одновременной отливкой и замыкающих колец.

7.3.3 Характеристики асинхронного двигателя. Скорость вращения вращающегося магнитного поля определяется либо угловой частотой , n, либо числом оборотов п в минуту. Эти две величины связаны формулой

(7.3)
Характерной величиной является относительная скорость вращающегося магнитного поля, называемая скольжением S:
 или
или 

где – угловая частота ротора, рад/с;

– число оборотов в минуту, об/мин.
Чем ближе скорость ротора  к скорости вращающегося магнитного поля
к скорости вращающегося магнитного поля  , тем меньше ЭДС, индуктируемые полем в роторе, а следовательно, и токи в роторе.
, тем меньше ЭДС, индуктируемые полем в роторе, а следовательно, и токи в роторе.
Убывание токов уменьшает вращающий момент, воздействующий на ротор, поэтому ротор двигателя должен вращаться медленнее вращающегося магнитного поля – асинхронно.
Можно показать, что вращающий момент АД определяется следующим выражением:

, (7.4)
где  ,
,  , x1,
, x1,  – параметры электрической схемы замещения, которые приводятся в справочниках по АД.
– параметры электрической схемы замещения, которые приводятся в справочниках по АД.

–действующее фазное напряжение на обмотке статора.
У современных асинхронных двигателей скольжение даже при полной нагрузке невелико – около 0,04 (четыре процента) у малых и около 0,015.. .0,02 (полтора-два процента) у крупных двигателей.
Характерная кривая зависимости М от скольжения S показана на рисунке 7.6,а.
Максимум вращающегося момента разделяет кривую  на устойчивую часть от S = 0 до
на устойчивую часть от S = 0 до  и неустойчивую часть от
и неустойчивую часть от  до S = 1, в пределах которой вращающий момент уменьшается с ростом скольжения.
до S = 1, в пределах которой вращающий момент уменьшается с ростом скольжения.
На участке от S = 0 до  при уменьшении тормозящего момента
при уменьшении тормозящего момента  на валу асинхронного двигателя увеличивается скорость вращения, скольжение уменьшается, так что на этом участке работа асинхронного двигателя устойчива.
на валу асинхронного двигателя увеличивается скорость вращения, скольжение уменьшается, так что на этом участке работа асинхронного двигателя устойчива.
На участке от  до S = 1 с уменьшением
до S = 1 с уменьшением  скорость вращенияувеличивается, скольжение уменьшается и вращающий момент увеличивается, что приводит к еще большему возрастанию скорости вращения, так что работа двигателя неустойчива.
скорость вращенияувеличивается, скольжение уменьшается и вращающий момент увеличивается, что приводит к еще большему возрастанию скорости вращения, так что работа двигателя неустойчива.
Таким образом, пока тормозящий момент  , динамическоеравновесие моментов автоматически восстанавливается. Когда же
, динамическоеравновесие моментов автоматически восстанавливается. Когда же  , при дальнейшем увеличении нагрузки возрастание скольжения приводит к уменьшению вращающегося моментаМ и двигатель останавливается вследствие преобладания тормозящего момента над вращающим.
, при дальнейшем увеличении нагрузки возрастание скольжения приводит к уменьшению вращающегося моментаМ и двигатель останавливается вследствие преобладания тормозящего момента над вращающим.
Значение Мк можно рассчитать по формуле

Для практики большое значение имеет зависимость скорости двигателя  от нагрузки на валу
от нагрузки на валу  . Эта зависимость носит название механической характеристики (рис.7.6,б).
. Эта зависимость носит название механической характеристики (рис.7.6,б).
Как показывает кривая рисунка 7.6,б, скорость асинхронного двигателя лишь незначительно снижается при увеличении вращающего момента н пределах от нуля до максимального значения  .Пусковой момент соответствующий S = 1, можно получить из (7.4), принимая S = 1. Обычно пусковой момент Мпуск = (0,8
.Пусковой момент соответствующий S = 1, можно получить из (7.4), принимая S = 1. Обычно пусковой момент Мпуск = (0,8 1,2)Мном, Мном – номинальный момент. Такую зависимость называют жесткой.
1,2)Мном, Мном – номинальный момент. Такую зависимость называют жесткой.

Рисунок 7.6. — Зависимость вращающего момента на валу асинхронного двигателя от скольжения (а), механическая характеристика (б)
Асинхронные двигатели получили широкое распространение благодаря следующим достоинствам: простоте устройства; высокой надежности в эксплуатации; низкой стоимости.
С помощью асинхронных двигателей приводятся в движение подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы и другие механизмы.
К недостаткам асинхронных двигателей относятся:
- ток при пуске асинхронного двигателя в 5-7 раз превышает ток в номинальном режиме
 ;
; - пусковой вращающий момент относительно момента в номинальном режиме мал
 ;
;
- регулирование скорости вращения ротора затруднено.
7 Электрические машины
Электрическая машина — электромагнитное устройство, состоящее из статора и ротора, и преобразующее механическую энергию в электрическую (генераторы) или электрическую в механическую (электрические двигатели).
Принцип действия электрических машин основан на законах электромагнитной индукции, Ампера и явлении вращающегося магнитного поля.

Согласно закону электромагнитной индукции, открытому М. Фарадеем в 1831 г, в проводнике, помещенном в магнитное поле и движущемся относительно него со скоростьюнаводится ЭДСЕ, направление которой определяется правилом буравчика или правилом правой руки (рис.7.1).

Рисунок 7.1. — Иллюстрация к закону электромагнитной индукции (а), и закону Ампера (б)

Если проводник длинойравномерно движется перпендикулярносиловым линиям магнитного поля, то значение наводимой в проводнике ЭДС равно

(7.1)
где В – индукция магнитного поля.
Согласно закону Ампера на проводник с током I, помещенный в магнитное поле, действует сила, направление которой определяется правилом буравчика или правилом левой руки, а значение по формуле:

(7.2)
где направление тока I, магнитной индукции  и силы
и силы  взаимно перпендикулярны.
взаимно перпендикулярны.
7.2 Вращающееся магнитное поле
Важным преимуществом трехфазного тока является возможность получения вращающегося магнитного поля, лежащего в основе принципа действия электрических машин – асинхронных и синхронных двигателей трехфазного тока.

Рисунок 7.2. – Схема расположения катушек при получении вращающегося магнитного поля (а) и волновая диаграмма трехфазной симметричной системы токов, текущих по катушкам (б)
Вращающееся магнитное поле получают, пропуская трехфазную систему токов (рис.7.2,б) по трем одинаковым катушкам А, В, С (рис.7.2,а) оси которых расположены под углом 120° относительно друг друга.
На рисунке 7.2,а показаны положительные направления токов в катушках и направления индукций магнитных полей ВА, ВВ, ВС, создаваемыми каждой из катушек в отдельности.

На рисунке 7.3 показаны действительные направления токов для моментов времени и направления индукцииВрез результирующего магнитного поля, создаваемого тремя катушками.
Анализ рисунка 7.3 позволяет сделать выводы:
а) индукция Врез результирующего магнитного поля с течением времени меняет свое направление (вращается);
б) частота вращения магнитного поля такая же, как и частота изменения тока. Так, при f = 50 Гц вращающееся магнитное поле совершает пять- десять оборотов в секунду или три тысячи оборотов в минуту.
Значение индукции результирующего Врез = 1,5Bm магнитного поля постоянно:
где Bm – амплитуда индукции одной катушки.

Рисунок 7.3. – Направление индукции вращающегося магнитного поля в различные моменты времени
7.3 Асинхронные машины
7.3.1 Принцип действия асинхронного двигателя (АД). Поместим между неподвижными катушками (рис.7.4) в области вращающегося магнитного поля, укрепленный’ на оси подвижный металлический цилиндр -ротор.
Пусть магнитное поле вращается «по часовой стрелке», тогда цилиндр относительно вращающегося магнитного поля вращается в обратном направлении.
Учитывая это, по правилу правой руки найдем направление наведенных в цилиндре токов.
На рисунке 7.4 направления наведенных токов (вдоль образующих цилиндра) показаны крестиками («от нас») и точками («к нам»).
Применяя правило левой руки (рис.7.1,б) получаем, что взаимодействие наведенных токов с магнитным полем порождает силы F, приводящие во вращательное движение ротор в том же направлении, в каком вращается магнитное поле.

Частота вращения ротора меньше частоты вращения магнитного

поля , т.к. при одинаковых угловых скоростях относительная скорость ротора и вращающегося магнитного поля была бы равна нулю, и в роторе не было бы наведенных ЭДС и токов. Следовательно, не было бы сил F, создающих вращающий момент. Рассмотренное простейшее устройство поясняет принцип действия асинхронных двигателей. Слово «асинхронный» (греч.) означает неодновременный. Этим словом подчеркивается различие в частотах вращающегося магнитного поля и ротора – подвижной части двигателя.

Рисунок 7.4. — К принципу действия асинхронного двигателя
Вращающееся магнитное поле, создаваемое тремя катушками, имеет два полюса и называется двухполюсным вращающимся магнитным полем (одна фаза полюсов).
За один период синусоидального тока двухполюсное магнитное поле делает один оборот. Следовательно, при стандартной частоте f1 = 50 Гц это поле делает три тысячи оборотов в минуту. Скорость вращения ротора немногим меньше этой синхронной скорости.
В тех случаях, когда требуется асинхронный двигатель с меньшей скоростью, применяется многополюсная обмотка статора состоящая из шести, девяти и т.д. катушек. Соответственно вращающееся магнитное поле будет иметь две, три и т.д. пары полюсов.
В общем случае, если поле имеет р пар полюсов, то его скорость вращения будет

7.3.2 Устройство асинхронного двигателя. Магнитная система (магнитопровод) асинхронного двигателя состоит из двух частей: наружной неподвижной, имеющей форму полого цилиндра (рис.8.5) и внутренней — вращающегося цилиндра.
Обе части асинхронного двигателя собираются из листов электротехнической стали толщиной 0,5 мм. Эти листы для уменьшения потерь на вихревые токи изолированы друг от друга слоем лака.
Неподвижная часть машины называется статором, а вращающаяся -ротором (от латинского stare — стоять и rotate — вращаться).

1 — статор; 2 — ротор; 3 — вал; 4 — витки обмотки статора;
5 — витки обмотки ротора
Рисунок 7.5. — Схема устройства асинхронного двигателя: поперечный разрез (а); обмотка ротора(б)
В пазах с внутренней стороны статора уложена трехфазная обмотка, токи которой возбуждают вращающееся магнитное поле машины. В пазах ротора размещена вторая обмотка, токи в которой индуктируются вращающимся магнитным полем.
Магнитопровод статора заключен в массивный корпус, являющийся внешней частью машины, а магнитопровод ротора укреплен на валу.
Роторы асинхронных двигателей изготавливаются двух видов: короткозамкнутые и с контактными кольцами. Первые из них проще по устройству и чаще применяются.
Обмотка короткозамкнутого ротора представляет собой цилиндрическую клетку («беличье колесо») из медных шин или алюминиевых стержней, замкнутых накоротко на торцах двумя кольцами (рис.7.5,б). Стержни этой обмотки вставляются без изоляции в пазы магнитопровода.
Применяется также способ заливки пазов магнитопровода ротора расплавленным алюминием с одновременной отливкой и замыкающих колец.

7.3.3 Характеристики асинхронного двигателя. Скорость вращения вращающегося магнитного поля определяется либо угловой частотой , n, либо числом оборотов п в минуту. Эти две величины связаны формулой

(7.3)
Характерной величиной является относительная скорость вращающегося магнитного поля, называемая скольжением S:
 или
или 

где – угловая частота ротора, рад/с;

– число оборотов в минуту, об/мин.
Чем ближе скорость ротора  к скорости вращающегося магнитного поля
к скорости вращающегося магнитного поля  , тем меньше ЭДС, индуктируемые полем в роторе, а следовательно, и токи в роторе.
, тем меньше ЭДС, индуктируемые полем в роторе, а следовательно, и токи в роторе.
Убывание токов уменьшает вращающий момент, воздействующий на ротор, поэтому ротор двигателя должен вращаться медленнее вращающегося магнитного поля – асинхронно.
Можно показать, что вращающий момент АД определяется следующим выражением:

, (7.4)
где  ,
,  , x1,
, x1,  – параметры электрической схемы замещения, которые приводятся в справочниках по АД.
– параметры электрической схемы замещения, которые приводятся в справочниках по АД.

–действующее фазное напряжение на обмотке статора.
У современных асинхронных двигателей скольжение даже при полной нагрузке невелико – около 0,04 (четыре процента) у малых и около 0,015.. .0,02 (полтора-два процента) у крупных двигателей.
Характерная кривая зависимости М от скольжения S показана на рисунке 7.6,а.
Максимум вращающегося момента разделяет кривую  на устойчивую часть от S = 0 до
на устойчивую часть от S = 0 до  и неустойчивую часть от
и неустойчивую часть от  до S = 1, в пределах которой вращающий момент уменьшается с ростом скольжения.
до S = 1, в пределах которой вращающий момент уменьшается с ростом скольжения.
На участке от S = 0 до  при уменьшении тормозящего момента
при уменьшении тормозящего момента  на валу асинхронного двигателя увеличивается скорость вращения, скольжение уменьшается, так что на этом участке работа асинхронного двигателя устойчива.
на валу асинхронного двигателя увеличивается скорость вращения, скольжение уменьшается, так что на этом участке работа асинхронного двигателя устойчива.
На участке от  до S = 1 с уменьшением
до S = 1 с уменьшением  скорость вращенияувеличивается, скольжение уменьшается и вращающий момент увеличивается, что приводит к еще большему возрастанию скорости вращения, так что работа двигателя неустойчива.
скорость вращенияувеличивается, скольжение уменьшается и вращающий момент увеличивается, что приводит к еще большему возрастанию скорости вращения, так что работа двигателя неустойчива.
Таким образом, пока тормозящий момент  , динамическоеравновесие моментов автоматически восстанавливается. Когда же
, динамическоеравновесие моментов автоматически восстанавливается. Когда же  , при дальнейшем увеличении нагрузки возрастание скольжения приводит к уменьшению вращающегося моментаМ и двигатель останавливается вследствие преобладания тормозящего момента над вращающим.
, при дальнейшем увеличении нагрузки возрастание скольжения приводит к уменьшению вращающегося моментаМ и двигатель останавливается вследствие преобладания тормозящего момента над вращающим.
Значение Мк можно рассчитать по формуле

Для практики большое значение имеет зависимость скорости двигателя  от нагрузки на валу
от нагрузки на валу  . Эта зависимость носит название механической характеристики (рис.7.6,б).
. Эта зависимость носит название механической характеристики (рис.7.6,б).
Как показывает кривая рисунка 7.6,б, скорость асинхронного двигателя лишь незначительно снижается при увеличении вращающего момента н пределах от нуля до максимального значения  .Пусковой момент соответствующий S = 1, можно получить из (7.4), принимая S = 1. Обычно пусковой момент Мпуск = (0,8
.Пусковой момент соответствующий S = 1, можно получить из (7.4), принимая S = 1. Обычно пусковой момент Мпуск = (0,8 1,2)Мном, Мном – номинальный момент. Такую зависимость называют жесткой.
1,2)Мном, Мном – номинальный момент. Такую зависимость называют жесткой.

Рисунок 7.6. — Зависимость вращающего момента на валу асинхронного двигателя от скольжения (а), механическая характеристика (б)
Асинхронные двигатели получили широкое распространение благодаря следующим достоинствам: простоте устройства; высокой надежности в эксплуатации; низкой стоимости.
С помощью асинхронных двигателей приводятся в движение подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы и другие механизмы.
К недостаткам асинхронных двигателей относятся:
- ток при пуске асинхронного двигателя в 5-7 раз превышает ток в номинальном режиме
 ;
; - пусковой вращающий момент относительно момента в номинальном режиме мал
 ;
;
- регулирование скорости вращения ротора затруднено.
Основы электротехники: понятия, свойства и применение электрических машин и двигателей
В данной статье мы рассмотрим основные понятия и свойства электрических машин и двигателей, а также их принцип работы и применение в различных областях.
Основы электротехники: понятия, свойства и применение электрических машин и двигателей обновлено: 21 ноября, 2023 автором: Научные Статьи.Ру
Помощь в написании работы
Введение
В электротехнике существует множество устройств, которые преобразуют электрическую энергию в механическую работу. Эти устройства называются электрическими машинами и двигателями. Они играют важную роль в различных отраслях промышленности, транспорте и бытовой сфере. В данной статье мы рассмотрим основные определения, принципы работы и свойства электрических машин и двигателей, а также их применение.
Нужна помощь в написании работы?
Мы — биржа профессиональных авторов (преподавателей и доцентов вузов). Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим бесплатно.
Определение электрических машин и двигателей
Электрические машины и двигатели – это устройства, которые преобразуют электрическую энергию в механическую работу. Они являются одним из основных компонентов электротехнических систем и широко применяются в различных областях, включая промышленность, транспорт, бытовую технику и другие.
Основной принцип работы электрических машин и двигателей основан на взаимодействии электрического поля и магнитного поля. Внутри машины или двигателя создается магнитное поле, которое взаимодействует с электрическим током, протекающим через проводник. Это взаимодействие вызывает появление силы, которая приводит к вращению ротора или движению механизма.
Существует несколько типов электрических машин и двигателей, включая постоянного тока (Постоянного тока) и переменного тока (Переменного тока). Каждый тип имеет свои особенности и применяется в различных ситуациях в зависимости от требуемой мощности, скорости и других параметров.
Основные свойства электрических машин и двигателей включают эффективность, мощность, скорость вращения, момент силы и другие. Эти свойства определяют возможности и характеристики работы машины или двигателя и важны при выборе и использовании в конкретных приложениях.
Электрические машины и двигатели находят широкое применение в различных областях. Они используются в промышленности для привода механизмов и оборудования, в транспорте для движения автомобилей, поездов и других транспортных средств, а также в бытовой технике для работы различных устройств, таких как стиральные машины, холодильники и другие.
Принцип работы электрических машин и двигателей
Электрические машины и двигатели работают на основе взаимодействия электрических и магнитных полей. Они преобразуют электрическую энергию в механическую работу.
Основными компонентами электрической машины или двигателя являются статор и ротор. Статор – это неподвижная часть машины, в которой создается магнитное поле. Ротор – это вращающаяся часть машины, которая взаимодействует с магнитным полем и создает механическую работу.
Принцип работы электрической машины или двигателя основан на явлении электромагнитной индукции. Когда через обмотку статора пропускается электрический ток, создается магнитное поле. Это магнитное поле взаимодействует с магнитным полем ротора, вызывая его вращение.
Существует несколько типов электрических машин и двигателей, включая постоянного тока (Постоянного тока) и переменного тока (Переменного тока). В машинах постоянного тока используется постоянный ток, а в машинах переменного тока – переменный ток.
Электрические машины и двигатели имеют различные характеристики, такие как мощность, скорость вращения, крутящий момент и эффективность. Эти характеристики определяют возможности и производительность машины или двигателя и важны при выборе и использовании в конкретных приложениях.
Электрические машины и двигатели находят широкое применение в различных областях. Они используются в промышленности для привода механизмов и оборудования, в транспорте для движения автомобилей, поездов и других транспортных средств, а также в бытовой технике для работы различных устройств, таких как стиральные машины, холодильники и другие.
Типы электрических машин и двигателей
Существует несколько типов электрических машин и двигателей, каждый из которых имеет свои особенности и применение. Рассмотрим некоторые из них:
Электрические двигатели постоянного тока (DC)
Электрические двигатели постоянного тока работают от источника постоянного тока и состоят из статора и ротора. Они обладают простой конструкцией и хорошей регулируемостью скорости вращения. Эти двигатели широко используются в промышленности и бытовой технике.
Электрические двигатели переменного тока (AC)
Электрические двигатели переменного тока работают от источника переменного тока и также состоят из статора и ротора. Они обладают простой конструкцией и высокой надежностью. Эти двигатели широко используются в промышленности, особенно в системах кондиционирования воздуха и насосных установках.
Синхронные электрические машины
Синхронные электрические машины работают от источника переменного тока и имеют ротор, который вращается синхронно с частотой источника питания. Они обладают высокой эффективностью и используются в генераторах электростанций и электрических моторах высокой мощности.
Асинхронные электрические машины
Асинхронные электрические машины, также известные как индукционные машины, работают от источника переменного тока и имеют ротор, который вращается с небольшой разницей скорости по сравнению со скоростью вращения статора. Они обладают простой конструкцией и широко используются в промышленности и бытовой технике.
Шаговые электрические двигатели
Шаговые электрические двигатели работают от импульсных сигналов и имеют ротор, который вращается на определенный угол при каждом импульсе. Они обладают высокой точностью позиционирования и широко используются в принтерах, робототехнике и других устройствах, требующих точного перемещения.
Это лишь некоторые из типов электрических машин и двигателей, которые используются в различных областях. Каждый тип имеет свои преимущества и ограничения, и выбор конкретного типа зависит от требований и условий применения.
Основные свойства электрических машин и двигателей
Электромагнитная индукция
Одно из основных свойств электрических машин и двигателей – это возможность преобразования электрической энергии в механическую и наоборот. Это осуществляется благодаря явлению электромагнитной индукции, которое заключается в возникновении электрического тока в проводнике при изменении магнитного поля вокруг него или при движении проводника в магнитном поле.
Вращательное движение
Электрические машины и двигатели способны преобразовывать электрическую энергию в механическую, создавая вращательное движение. Они состоят из статора (неподвижной части) и ротора (вращающейся части), которые взаимодействуют между собой, создавая вращательное движение.
Эффективность
Электрические машины и двигатели обладают определенной эффективностью, которая определяет, насколько эффективно они преобразуют электрическую энергию в механическую и наоборот. Чем выше эффективность, тем меньше потери энергии и тем более эффективно работает машина или двигатель.
Мощность
Мощность электрических машин и двигателей определяет их способность выполнять работу. Она измеряется в ваттах (Вт) и может быть различной в зависимости от типа и размера машины или двигателя. Чем больше мощность, тем больше работу они могут выполнить за определенное время.
Скорость вращения
Скорость вращения является одним из важных параметров электрических машин и двигателей. Она определяет скорость вращения ротора и может быть регулируемой или постоянной в зависимости от типа машины или двигателя. Скорость вращения может быть выражена в оборотах в минуту (об/мин) или радианах в секунду (рад/с).
Крутящий момент
Крутящий момент – это сила, которая создается электрической машиной или двигателем и приводит к вращению ротора. Он измеряется в ньютон-метрах (Н·м) и определяет силу, с которой машина или двигатель способны вращать нагрузку. Чем больше крутящий момент, тем больше сила, которую они могут развивать.
Напряжение и ток
Электрические машины и двигатели работают на определенном напряжении и потребляют определенный ток. Напряжение определяет электрическую разницу потенциалов, а ток – силу электрического тока, который протекает через машину или двигатель. Напряжение и ток могут быть постоянными или переменными в зависимости от типа и назначения машины или двигателя.
Это лишь некоторые из основных свойств электрических машин и двигателей. Каждое из них играет важную роль в их работе и определяет их возможности и характеристики.
Применение электрических машин и двигателей
Электрические машины и двигатели широко применяются в различных областях и отраслях промышленности. Они играют важную роль в преобразовании электрической энергии в механическую, что позволяет использовать их для различных целей. Вот некоторые из основных областей применения электрических машин и двигателей:
Промышленность
В промышленности электрические машины и двигатели используются для привода различных механизмов и оборудования. Они могут использоваться в производстве, металлообработке, химической промышленности, пищевой промышленности и других отраслях. Например, электрические двигатели применяются в насосах, компрессорах, конвейерах, станках и других механизмах для обеспечения их работы.
Транспорт
Электрические машины и двигатели также широко используются в транспортных средствах. Они могут быть установлены в автомобилях, поездах, самолетах, кораблях и других видов транспорта. Электрические двигатели в электромобилях, например, обеспечивают привод колес и позволяют им двигаться без использования топлива. Кроме того, электрические машины используются в системах управления и автоматизации транспортных средств.
Энергетика
В энергетике электрические машины и двигатели играют важную роль. Они используются в генераторах для преобразования механической энергии в электрическую. Также электрические машины могут быть использованы в системах энергоснабжения для привода насосов, вентиляторов и других устройств. Кроме того, электрические машины могут использоваться в возобновляемых источниках энергии, таких как ветряные и солнечные установки.
Бытовая техника
Электрические машины и двигатели также широко применяются в бытовой технике. Они могут быть установлены в стиральных машинах, холодильниках, кондиционерах, пылесосах и других устройствах для обеспечения их работы. Например, электрические двигатели в стиральных машинах обеспечивают вращение барабана, а вентиляторы в кондиционерах обеспечивают циркуляцию воздуха.
Это лишь некоторые из областей применения электрических машин и двигателей. Они также могут использоваться в медицинском оборудовании, лабораторных установках, компьютерах и других устройствах. Важно отметить, что электрические машины и двигатели играют ключевую роль в современной технологии и промышленности, обеспечивая эффективность и автоматизацию различных процессов.
Таблица свойств электрических машин и двигателей
| Свойство | Описание |
|---|---|
| Эффективность | Отношение полезной работы, выполняемой машиной или двигателем, к затраченной энергии. |
| Мощность | Способность машины или двигателя выполнять работу за единицу времени. |
| КПД (Коэффициент полезного действия) | Отношение полезной мощности к полной мощности, вырабатываемой машиной или двигателем. |
| Вращающий момент | Сила, создаваемая машиной или двигателем, которая вызывает вращение. |
| Скорость вращения | Скорость, с которой машина или двигатель вращается. |
| Напряжение | Электрический потенциал, который приводит к движению электрического тока в машине или двигателе. |
| Ток | Поток электрических зарядов, протекающих через машину или двигатель. |
| Температура | Измерение тепловой энергии, выделяющейся в машине или двигателе. |
Заключение
В данной лекции мы рассмотрели основные аспекты электрических машин и двигателей. Мы определили электрические машины как устройства, которые преобразуют электрическую энергию в механическую работу, а также двигатели как подвижные части электрических машин. Мы изучили принцип работы электрических машин и двигателей, а также рассмотрели различные типы электрических машин и двигателей, такие как постоянного и переменного тока. Мы также обсудили основные свойства электрических машин и двигателей, такие как мощность, КПД и скорость вращения. Наконец, мы рассмотрели применение электрических машин и двигателей в различных областях, таких как промышленность, транспорт и бытовая техника. Электрические машины и двигатели являются важной частью современной технологии и играют ключевую роль в нашей повседневной жизни.
Основы электротехники: понятия, свойства и применение электрических машин и двигателей обновлено: 21 ноября, 2023 автором: Научные Статьи.Ру