9) Классификация законов регулирования.Нелинейные
Нелинейные законы регулирования могут быть весьма разнообразными, но в стандартных регуляторах обычно применяют 2х и 3х-позиционные законы регулирования.
Общий вид записи 2-позиционного закона регулирования:

Двухпозиционный закон регулирования

Величина управляющего воздействия характеризуется С1 и С2.
Примеры устройств, работающих по 2-позиционному закону регулирования: холодильник, утюг и т.д.
Недостаток данного закона — постоянные колебания выходной величины вокруг заданного значения.
Трехпозиционный закон регулирования

10) Классификация законов регулирования. Линейные
Линейные законы регулирования
Общая запись стандартного линейного закона регулирования представляет собой пропорционально-интегрально-дифференциальный (ПИД) закон регулирования:

Линейность заключается в том, что переменная х, ее производная и интеграл входят в уравнение закона только в первых степенях.
Частные случаи: П-, И-, ПИ-, ПД-закон.
Коэффициенты С1, С2, С3 показывают удельный вес каждой из составляющих. Первая составляющая используется самостоятельно в том случае, когда необходима только устойчивость системы. Вторая составляющая устраняет статическую ошибку, возникающую при использовании пропорционального регулятора, но при этом время переходных процессов увеличивается. Третья составляющая предвосхищает изменение регулируемой переменной, т.е. учитывает изменение переменной во времени. Меняя соотношения между С1, С2 и С3 можно придавать регулятору те или иные свойства.
Пропорциональный закон регулирования
П ропорциональный регулятор обеспечивает простой быстродействующий процесс регулирования системы, но дает статическую ошибку. Эту ошибку можно уменьшить за счет роста К, но нельзя устранить окончательно, оставаясь в рамках пропорционального закона. На объектах с невысокими требованиями точности этого может быть достаточно, но повышение К снижает запас устойчивости. Из этого следует, что расчет настроек регулятора основывается на компромиссе между точностью и устойчивостью. Пропорциональные регуляторы осуществляют довольно устойчивое регулирование.
где у(t) – выходной параметр; х(t) – входной параметр; К – коэффициент пропорциональности
Интегральный закон регулирования
Интегральный закон регулирования характеризуется отсутствием статической ошибки. На разных частотах усиление разное: при малых частотах усиление стремится к бесконечности, при высоких — к нулю.
И нтегральный регулятор дает задержку на полпериода.
где ТИ – время интегрирования; у0 – начальные условия
Пропорционально-интегральный закон регулирования
В ремя интегрирования (удвоения) — это время, в течение которого интегральная составляющая изменит выходную величину y на столько, сколько изменила ее перед этим пропорциональная составляющая. Время удвоения служит мерой интенсивности интегральной части.
Пропорционально-интегральный закон регулирования — самый распространенный, так как он объединяет в себе лучшие свойства пропорционального и интегрального законов, но иногда ПИ-закон бывает недостаточно быстрым
Пропорционально-интегрально-дифференциальный закон регулирования
ПИД-закон регулирования обладает наибольшей гибкостью, то есть удовлетворяет требованиям качества регулирования на любом объекте
Р ассмотрим свойства исполнительных механизмов (ИМ) и их учет при формировании законов регулирования
5.5. Законы регулирования сау

,
т.е. управляющие воздействия зависят от ошибки регулирования е и внешних воздействий: задающих и возмущающих.

Рассмотрим САР, построенную по принципу отрицательной обратной связи. В общем виде закон регулирования может быть представлен выражением

Или в операторной форме

(5.19)
5.5.1. Пропорциональное регулирование
Пропорциональный закон регулирования имеет вид

Достоинство — простота регулирования. Однако при таком регулировании обеспечивается невысокая точность регулирования, особенно для объектов с плохими динамическими свойствами.
Предварительно полагаем, что объект регулирования является позиционным звеном, т.е. в установившемся режиме W0(p) = k0 и Wp(p)=k1.
Тогда в разомкнутом состоянии будет характеризоваться следующей передаточной функцией:

Статическая ошибка в этом случае


где εg— собственно статическая ошибка воспроизведения;
εF — статическая ошибка, вызванная возмущением;
k=k1∙k0 — суммарный коэффициент усиления разомкнутой системы (контурный коэффициент усиления), т.к в установившемся режиме при p=0 W0(p)=k0 и Wp(p)=k1 .

В общем виде передаточная функция разомкнутой системы при пропорциональном регулировании и статическом объекте регулирования будет иметь вид

Следовательно, при пропорциональном регулировании статическая ошибка уменьшается в (1+k) раз, поэтому система регулирования является статической.
5.5.2. Интегральное регулирование
Интегральный закон регулирования имеет вид

Передаточная функция управляющего устройства (регулятора)

Передаточная функция разомкнутой системы


где — передаточная функция статического звена.
В общем виде передаточная функция системы будет иметь вид

Статическая ошибка при таком регулировании

Статическая ошибка no задающему воздействию

В установившемся режиме при p→0 Wраз(p)→∞ т.е. статическая ошибка по задающему воздействию ε→0 и система является астатической по задающему воздействию. Ошибка по возмущению зависит от вида функции WF(p) и может быть равной или отличной от нуля. Если объект регулирования является статическим звеном, т.е. WF(p)=k0, то ошибка регулирования, т.е. статическая ошибка ε→0, и система является астатической по возмущающему воздействию. Если же объект содержит интегрирующее звено, то

и система является статической по возмущающему воздействию.
Следовательно, при интегральном регулировании система является астатической, с астатизмом первого порядка.
Порядок астатизма определяется передаточной функцией разомкнутой системы в общем виде

где r — порядок астатизма системы.
Порядок астатизма и астатизм системы определяются не только регулятором, но и объектом. Но, как правило, порядок астатизма совпадает с количеством чисто интегрирующих составляющих и интегрирующих сомножителей в передаточной функции регулятора.
5.5.3. Регулятор реализует управление по закону


При этом

или .
Можно показать, что система регулирования в этом случае является астатической, с астатизмом второго порядка, т.е. система астатическая как по задающему, так и по возмущающему воздействию.
Таким образом, законы интегрального регулирования повышают точность САР, однако, по сравнению с пропорциональным регулированием, быстродействие САР снижается.
5.5.4. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОЕ РЕГУЛИРОВАНИЕ

Передаточная функция регулятора

При таком регулировании сочетаются высокое быстродействие пропорционального регулирования и высокая точность интегрального регулирования.
5.5.5. РЕГУЛИРОВАНИЕ ПО ПРОИЗВОДНОЙ

В таком виде регулирование не применяется, т.к. в статике (при p=0) выход регулятора равен нулю. Поэтому обязательно необходимо наличие параллельного либо P-, либо I-канала, а чаще обоих. Регулирование по производной позволяет обеспечить быстродействие и динамическую точность регулирования.
5.5.6. КОМБИНИРОВАННОЕ РЕГУЛИРОВАНИЕ
Характеристика регулятора в данном случае пропорционально-дифференциально-интегральная.


Данный закон является наиболее универсальным, поскольку выбирая параметры настройки регулятора (k1, Т1, Т2, Т3) можно усиливать или ослаблять эффекты, производимые каждой составляющей закона. Наличие параллельного D-канала в регуляторе повышает быстродействие системы и снижает ошибки в динамике.
5.6. КОНТРОЛЬНЫЕ ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Дайте характеристику статического и динамического стационарного режима САР.
2. Назовите и объясните способы устранения статической ошибки САР.
3. Как влияет величина коэффициента усиления САР на величину статической ошибки регулирования?
4. Что такое статизм системы регулирования?
5. Принцип построения астатических САР.
6. Какова роль интегрирующих звеньев, включенных в систему регулирования?
7. Объясните принцип устранения статического отклонения в САР введением компенсирующего воздействия.
8. Каким образом исследуются гармонические стационарные режимы САР?
9. Особенности стационарных динамических режимов САР при воздействиях, изменяющихся с постоянной производной.
10. Назовите и объясните законы регулирования САР.
11. Что дают интегральные законы регулирования САР?
12. Какой режим устанавливается в линейной системе при гармоническом воздействии и какими параметрами он характеризуется?
13. Какие ошибки возникают в следящей системе при линейном законе изменения задающего воздействия, если система содержит одно или два интегрирующих звена?
14. Как влияет форма задающего воздействия на статическую ошибку в следящей системе регулирования?
15. Перечислите применяемые в системах регулирования законы регулирования.
16. В чем заключаются особенности интегрального регулирования?
7. Законы регулирования и их реализация
Требуемое качество регулирования зависит от условий протекания технологического процесса и работы агрегата. Оно должно обеспечить точность поддержания технологического режима и его экономическую эффективность.
В каждом случае определяют наиболее существенные показатели качества переходного процесса, которые необходимо обеспечить в первую очередь. Чаще всего, это максимальное динамическое отклонение, время регулирования или интегральный показатель.
7.1. Типовые оптимальные переходные процессы регулирования
Рассмотрим систему управления, в задачу которой входит поддержание заданного значения выходной величины при различных внешних воздействиях. Обычно стараются реализовать один из трех типовых оптимальных процессов регулирования.

Рис. 1. Типовые оптимальные переходные процессы регулирования
1) Апериодический процесс с минимальным временем регулирования. Характеризуется минимальной величиной общего времени регулирования tр и минимальным регулирующим воздействием. Применяется при большом допустимом динамическом отклонении регулируемой величины у1 (рис. 1а).
2) Процесс с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний рекомендуется применять в тех случаях, когда допускают определенную величину перерегулирования (отношения у2/у1), но предъявляют более жесткие, чем в предыдущем случае, требования к величине динамического отклонения x1 (рис. 1б).
3) Процесс с минимальным квадратичным интегральным показателем ( min x 2 dt ) характеризуется наибольшими перерегулированием (у2/у1 = 40…45%) и tр временем регулирования, но зато минимальной величиной динамического отклонения у1 (рис. 1в).
7.2. Законы регулирования и автоматические регуляторы
Для реализации этих переходных процессов в САУ реальными объектами применяют автоматические регуляторы – специальные автоматические устройства, подключаемых к объекту регулирования, которые обеспечивают поддержание заданных значений его регулируемых величин или изменение их по определенному закону.
Законом (алгоритмом) регулирования называют математическую зависимость между выходным регулирующим воздействием Yр и входным отклонением Xр регулируемой величины Y от заданного значения Хо
Yр = f (Xр), где Xр = Xo – Y .










В идеальных условиях работы САР (линейность характеристики объекта, стационарность случайных возмущений, малая инерционность регулятора по сравнению с объектом) регулятор должен иметь линейную передаточную функцию
По характеру работы регуляторы делятся на непрерывные, импульсные и релейные. Наиболее широкое распространение получили регуляторы непрерывного действия, использующие линейные законы регулирования вида

, (1)
где Ci – настройки регулятора.
Различают три типовых закона регулирования:
П – пропорциональный; И – интегральный; Д – дифференциальный.
Для управления реальными объектами в современных регулирующих устройствах реализуются также следующие комбинации этих законов:
ПИ – пропорционально–интегральный;
ПД – пропорционально–дифференциальный;
ПИД – пропорционально–интегральный–дифференциальный.
В соответствии с реализуемыми законами регулирования регуляторы непрерывного действия делятся на следующие типы.
1. Пропорциональные или П–регуляторы, в которых выходная величина Yрр связана с входной величиной Xр соотношением Yр = Kp Xр. Передаточная функция – Wр(p) = Кр, где Кр – коэффициент передачи регулятора.
Каждому значению регулируемого параметра Y соответствует определенное значение отклонения Хр. При отклонении Y от заданного значения Xo, на выходе сразу возникает изменение регулирующего воздействия Yp, приводящее к восстановлению заданной величины Y. Такая жесткая зависимость между входной и выходной величинами приводит к статической ошибке системы
Хст = Yуст – Хо , которая обратно пропорциональна Кр.
Зато П–регуляторы просты, работают быстро и устойчиво.
- Интегральные или И–регуляторы, у которых изменение выходной величины пропорционально интегралу изменения входной величины

 Постоянная времени интегрирования (время изодрома – перестройки) – Ти , от величины которой зависит угол выходной характеристики Yp(t). При этом законе регулирования скорость перемещения регулирующего органа пропорциональна отклонению регулируемой величины Y от заданного значения Xo. Отсутствует жесткая зависимость между Xр и Y, поэтому статическая ошибка равна нулю. Выигрывает по точности, но проигрывает по быстродействию и устойчивости работы. Присуща высокая колебательность переходного процесса. И–регуляторы применяют для управления малоинерционными объектами с небольшим временем запаздывания и существенным самовыравниванием.
Постоянная времени интегрирования (время изодрома – перестройки) – Ти , от величины которой зависит угол выходной характеристики Yp(t). При этом законе регулирования скорость перемещения регулирующего органа пропорциональна отклонению регулируемой величины Y от заданного значения Xo. Отсутствует жесткая зависимость между Xр и Y, поэтому статическая ошибка равна нулю. Выигрывает по точности, но проигрывает по быстродействию и устойчивости работы. Присуща высокая колебательность переходного процесса. И–регуляторы применяют для управления малоинерционными объектами с небольшим временем запаздывания и существенным самовыравниванием.
- Пропорционально–интегральные или ПИ–регуляторы, у которых изменение выходной величины пропорционально как изменению входной величины, так и интегралу ее изменения
 ,
,  где Tи — время интегрирования, в течение которого регулирующее воздействие, обусловленное работой П–составляющей, будет удвоено под действием И–составляющей регулятора. Передаточная функция ПИ-регулятора
где Tи — время интегрирования, в течение которого регулирующее воздействие, обусловленное работой П–составляющей, будет удвоено под действием И–составляющей регулятора. Передаточная функция ПИ-регулятора  . По быстродействию этот регулятор ближе к П, чем к И. При этом И–часть устраняет статическую ошибку регулирования.
. По быстродействию этот регулятор ближе к П, чем к И. При этом И–часть устраняет статическую ошибку регулирования.
- Пропорционально–дифференциальные или ПД–регуляторы, которые оказывают суммарное воздействие на регулирующий орган, пропорциональное как отклонению регулируемой величины, так и скорости ее отклонения
 , где TД — время предварения (дифференцирования), с. Передаточная функция ПД–регулятора имеет вид Wпд (p) = kр (1 + TД p). Введение Д–части целесообразно при управлении объектами, в которых сильно проявляется скорость отклонения регулируемой величины. Предваряющее воздействие повышает быстродействие системы, но не исключает статическую ошибку.
, где TД — время предварения (дифференцирования), с. Передаточная функция ПД–регулятора имеет вид Wпд (p) = kр (1 + TД p). Введение Д–части целесообразно при управлении объектами, в которых сильно проявляется скорость отклонения регулируемой величины. Предваряющее воздействие повышает быстродействие системы, но не исключает статическую ошибку.
- Пропорционально–интегрально–дифференциальные ПИД–регуляторы, у которых изменение выходной величины пропорционально отклонению регулируемой величины, интегралу этого изменения и скорости изменения этой величины
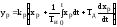 . Передаточная функция ПИД–регулятора Wпид (p) = Kp ( 1 + 1/ Ти p + Тд р ) или, после преобразования –
. Передаточная функция ПИД–регулятора Wпид (p) = Kp ( 1 + 1/ Ти p + Тд р ) или, после преобразования –  По характеру функционирования в САР, этот закон с увеличением Тд приближается к ПД, а при уменьшении Ти – к ПИ-закону. ПИД-закон значительно улучшает качество регулирования, особенно при резких возмущениях. Однако такие регуляторы – самые сложные по технической реализации и настройке. Настройками непрерывных регуляторов П–, И–, ПИ–, ПД– и ПИД–действия можно реализовать любой из трех типовых оптимальных процессов регулирования.
По характеру функционирования в САР, этот закон с увеличением Тд приближается к ПД, а при уменьшении Ти – к ПИ-закону. ПИД-закон значительно улучшает качество регулирования, особенно при резких возмущениях. Однако такие регуляторы – самые сложные по технической реализации и настройке. Настройками непрерывных регуляторов П–, И–, ПИ–, ПД– и ПИД–действия можно реализовать любой из трех типовых оптимальных процессов регулирования.
Основные законы регулирования в промышленных САР
Министерство образования и науки Республики Казахстан
Карагандинский государственный технический университет
Кафедра АПП
РЕФЕРАТ
Дисциплина: «Линейные системы автоматического регулирования»
Тема: «Основные законы регулирования в промышленных САР»
Выполнила: ст. гр. АиУ-15-1
Курмангалиева А.Е.
Проверил: Сундет Г.Е.
2017
2. u(t) = F(x, g, f)
Под законом регулирования, или, в общем случае, законом
управления понимается математическая форма преобразований
задающих
воздействий,
возмущений,
воздействий
обратных
связей,
определяющих
управляющие воздействия u(t). Иными словами, это
функциональная зависимость, в соответствии с которой
управляющее устройство (УУ) формирует управляющее
воздействие u(t). Она может быть представлена в
следующем виде:
*
3. u(t) = F1(x) +F2(g) +F3(f)
*
Здесь первое слагаемое соответствует регулированию по
отклонению (принцип Ползунова-Уатта), второе и третье регулированию по внешнему воздействию (принцип
Понселе).
4.
Закон регулирования – это зависимость перемещения
регулирующего органа от отклонения регулируемой
переменной. Качество регулирования обеспечивается выбором
закона
регулирования.
Наибольшее
распространение
получили следующие 5 основных законов регулирования:
двухпозиционный;
пропорциональный (П);
интегральный (И);
дифференциальный (Д);
пропорционально-интегрально-дифференциальный (ПИД).
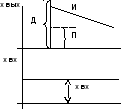
5.
Система ручного регулирования уровня
6.
Двухпозиционный закон регулирования — это
«Двухпозиционное регулирование», которое называют
еще
«Старт-стопное
регулирование».
Чтобы
моделировать двухпозиционный режим регулирования,
оператор
на
рисунке
выше
устанавливал
бы
регулирующий клапан в одно из двух крайних
положений: или полностью открыт, или полностью
закрыт, то есть «включено» или «выключено». Так,
например, если уровень будет низким, оператор откроет
клапан полностью, чтобы вода могла наполнить
резервуар. Затем, как только вода достигнет желаемого
уровня, оператор полностью закроет клапан, чтобы
прекратить приток воды в резервуар.
7.
Чтобы
моделировать
пропорциональный
закон
регулирования, оператор непрерывно устанавливал бы
регулирующий
клапан
в
положение,
отвечающее
произошедшему на данный момент изменению уровня. Так,
например, если уровень понизился немного, оператор
откроет клапан немного; если уровень понизился еще
больше, оператор увеличит степень открытия клапана.
Наоборот, если уровень несколько повысится, оператор
уменьшит степень открытия клапана на соответствующую
величину. Таким образом, моделируя пропорциональное
регулирование, оператор непрерывно в соответствии с
изменением уровня изменяет положение клапана.
Регулирование уровня при этом будет выполняться более
эффективно, чем при простом открытии и закрытии
клапана. Когда изменения уровня прекращаются, оператор
прекращает позиционирование клапана.
8.
Система регулирования уровня с большой емкостью
9.
Рисунок выше иллюстрирует процесс, который может
требовать применения другого закона регулирования. Этот
процесс — тот же самый процесс поддержания уровня из
первого примера, отличающийся лишь тем, что емкость
резервуара много больше, в то время как питательная труба
остается той же самой. Это означает, что, когда оператор
открывает или закрывает клапан как прежде, оказывается
меньшее непосредственное влияние на уровень в резервуаре.
При увеличения уровня, пропорциональное регулирование
могло бы отработать воздействия, направленные на снижение
уровня, но действие не было бы достаточно быстрым, чтобы
поддерживать уровень внутри желательных ограничений.
10.
Чтобы
моделировать
закон
интегрального
регулирования, оператор продолжает открывать или
закрывать клапан так долго пока уровень отклоняется от
уставки в независимости от того происходят ли при этом
произвольные изменения уровня или не происходят. Так,
например, если уровень немного понизился, оператор
приоткроет клапан немного. Затем, даже если уровень
перестал изменяться, оператор продолжит открывать
клапан пока уровень не возвратится к заданному значению
(уставке).
11.
Закон дифференциального регулирования используется,
чтобы предотвратить чрезмерное отклонение регулируемой
переменной от уставки, вырабатывая корректирующее
воздействие пропорциональное скорости отклонения. Так,
моделируя дифференциальный закон регулирования,
оператор изменяет степень открытия регулирующего
клапана в соответствии со скоростью возрастания
отклонения уровня от уставки. Например, если уровень
начал понижаться, оператор быстро увеличит степень
открытия приточного клапана (при чем эти изменения
положения
клапана
большие,
чем
при
чисто
пропорциональном
законе
регулирования),
чтобы
замедлить скорость изменения уровня и, в конечном счете,
стабилизировать уровень. Если уровень начал быстро
понижаться, оператор должен быстро и значительно
открыть клапан, чтобы замедлить скорость падения уровня
и потом его стабилизировать.
12.
Последним
мы
рассмотрим
пропорциональноинтегрально-дифференциальный
закон
регулирования. Чтобы воспроизвести этот закон
регулирования,
оператор
изменяет
положение
регулирующего клапана в зависимости от величины
отклонения, скорости изменения и продолжительности
рассогласования. Другими словами, оператор в этом
случае объединяет пропорциональный, интегральный и
дифференциальный законы регулирования.