Пуск синхронного двигателя
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, т.к. его ротор обладающий определенной инерцией, не может быть в течении одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:
1. Пуск с помощью вспомогательного двигателя.
2. Асинхронный пуск двигателя.
1. Пуск с помощью вспомогательного двигателя.
Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
2. Асинхронный пуск двигателя.
Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами.
При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.
Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап.
Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Особенности пуска двигателей с постоянными магнитами
Подавляющее большинство синхронных микродвигателей пускается как асинхронные, для чего они снабжаются пусковой обмоткой. Однако в отличие от двигателей с электромагнитным возбуждением постоянные магниты на время пуска невозможно «отключить». Поэтому в процессе разгона поток постоянных магнитов индуцирует в обмотке статора ЭДС, под действием которой по обмотке через источник протекает ток (рис. 3.4). Этот ток, взаимодействуя с полем постоянного магнита, создает момент по своей природе аналогичный асинхронному моменту, развиваемому пусковой обмоткой. Однако этот момент является не движущим, а тормозящим.

Частота тока в пусковой обмотке пропорциональна скольжению (f2 = f1s), поэтому максимум асинхронного момента лежит в области малыхскольжений. Частота тока в обмотке статора от поля постоянных магнитов пропорциональна скорости ротора [n2 = n1(1-s)], поэтому максимум тормозного момента лежит в области малых значений n,т.е. больших скольжений.
Тормозной момент образует провал в пусковой характеристике двигателя, тем самым создает опасность застревания его на малой скорости вращения (рис. 3.5). Понятно, что с этой точки зрения надо бы иметь небольшой поток постоянного магнита, т.е. небольшую ЭДС Е0, хотя винтересах работы в синхронном режиме должно быть наоборот. Оптимальноеотношение Е0/U для двигателей мощностью 10 -120 Вт при f = 50 Гц,p = 2лежит в пределах 0,5 — 0,8.
Задача 3.1. Построить угловую характеристику синхронного микродвигателя радиальной конструкции при r1 = 0, m = 2, U=220 В, Е0 = 185 В, n = 3000 об/мин, xd = 35 Ом, xq = 46 Ом и аксиальной конструкции при r1 = 0, тех же значениях m, U, E, n1, но xd = xq = 37 Ом.
ЛЕКЦИЯ 8
§ 3.3. Синхронные реактивные микродвигатели

Синхронными реактивными микродвигателями (СРМД) называются двигатели, вращающий момент в которых создается только НС статораза счет разной магнитной проводимости по продольной и поперечной осям машины. Различие проводимостей по осям d и q осуществляется либо конструкцией ротора благодаря выступам и впадинам (рис. 3.6,а), либо выполнением его из разных материалов, например из алюминия 1 и стали 2 (рис. 3.6,б).
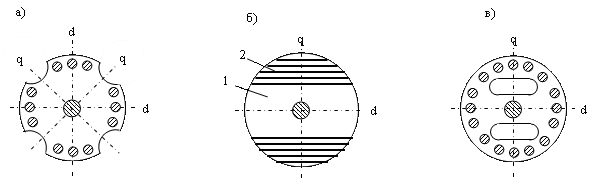
Рис. 3.6. Роторы синхронных реактивных микродвигателей
Принцип действия СРМД в синхронном режиме рассмотрим на следующей модели (рис. 3.7). Представим вращающееся магнитное поле статора П-образным постоянным магнитом, внутри которого находится невозбужденный явнополюсный ротор. При совпадении оси постоянных магнитов с продольной осью ротора силовые линии поля проходят через зазор радиально, т.е. не деформируясь (рис. 3.7,а). В этом случае q = 0, МР = 0.
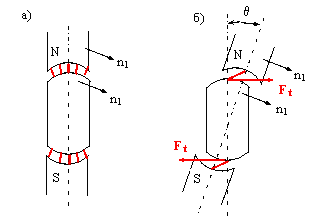
Рис. 3.7. К вопросу о принципе действия СРМД
Если вращающийся ротор чуть притормозить, между осями образуется угол q, линии поля, проходя через зазор, деформируются (их можно уподобить резиновым жгутам), возникают силы магнитного натяжения, тангенциальные составляющие которых развивают реактивный момент и увлекают ротор за полем статора (рис.3.7,б). Формулу реактивного момента при r1 = 0 получим из (3.2), положив в ней Е0 = 0.
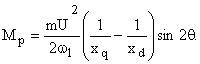
(3.3)

Исходя из принципа действия и формулы (3.3) можно предположить, что чем больше разница между xd и x q, тем лучше свойства машины. Однако это не так. Дело в том, что с увеличением разности x d и x q увеличивается средний воздушный зазор, что приводит к увеличению намагничивающего тока, тока статора, падения напряжения в обмотке статора и, как следствие, к уменьшению магнитного потока в асинхронном режиме. При этом уменьшается пусковой (при s = 1) и подсинхронный (при s @ 0) моменты.
Исследования показали, что для ротора рис. 3.6,а оптимальными размерами будут: отношение полюсной дуги к полюсному делению 0,5 ¸ 0,6;dmax/dmin = 10 ¸12. И даже такие двигатели имеют невысокие энергетические показатели: КПД = 5 ¸ 50 %; сosj = 0,2 ¸ 0,5; Mп/Mном = 1 ¸1,5; Mвх/Mном = 1 ¸1,5; Mmax/Mном = 1,2 ¸ 2,2.
В последнее время большое признание получили двигатели с ротором типа рис. 3.6,в, которые имеют значительную разность хdи хqпри относительно небольшом среднем воздушном зазоре. Благодаря такой конструкции, характеристики СРМД улучшаются в среднем на 30 ¸ 40 % по сравнению с ротором явнополюсной конструкции (рис.3.6,а).
В целом СРМД развивают полезную мощность в 2 ¸ 3 раза меньшую, чем асинхронные двигатели таких же габаритов. Во многом это объясняется тем, что в создании момента участвует только одна половина машины (статор), а не две (статор и ротор), как во всех других двигателях.
Векторную диаграмму синхронного реактивного микродвигателя можно построить, используя уравнение напряжения синхронного явнополюсного двигателя, приняв Е=0 (рис. 3.8).


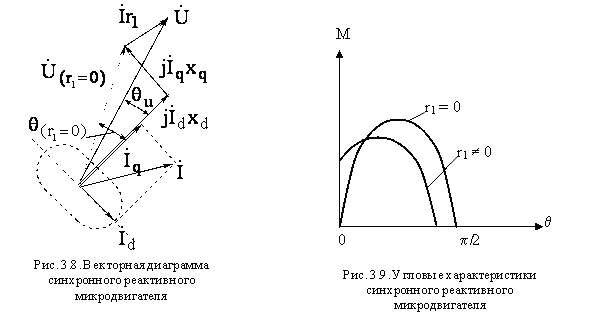
На рис. 3.8 пунктиром показан вектор напряжения при r1 = 0. Видно, что с учетом r1 угол q уменьшается. Это дает основания утверждать, что активное сопротивление статора смещает угловую характеристику в сторону меньших углов. Кроме того, из-за потерь в обмотке статора уменьшается полезный момент, что смещает эту характеристику еще и вниз (рис. 3.9).
В порядке иллюстрации можно привести формулу электромагнитного момента реактивного двигателя с учетом активного сопротивления статора [1]

В результате смещения угловой характеристики влево максимальный момент реактивного двигателя наступает при углах порядка 25 о .
Особенности пусковой характеристики СРМД. В двигателях с ротором рис. 3.6,а пусковая обмотка несимметричная либо по причине отсутствия стержней в междуполюсном пространстве, либо по причине разных индуктивных сопротивлений стержней, лежащих в полюсных наконечниках и вне их.
В этом случае поле, созданное короткозамкнутой обмоткой ротора, становится эллиптическим, т.е. состоящим из прямо и обратновращающихся составляющих.
Прямое поле ротора вращается относительно статора с синхронной частотой nпр = n1 и, взаимодействуя с его полем, создает обычный асинхронный момент (Ма). Обратное поле ротора вращается относительно статора с частотой nобр = n1(1-2s), поэтому его действие зависит от скольжения s.
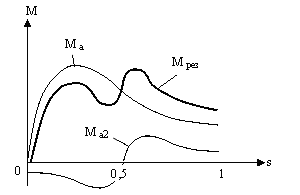
Рис. 3.10. Пусковая характеристика СРМД с несимметричной пусковой обмоткой
Пока скольжение изменяется от 1 до 0,5 это поле помогает разгонять ротор. Когда же скольжение станет меньше 0,5, это поле будет создавать тормозной момент (Ма2), препятствующий разгону двигателя. В результате в пусковой характеристике появится провал, могущий привести к застреванию двигателя на скорости, примерно равной половине синхронной (рис. 3.10).
Как запустить синхронный двигатель с постоянными магнитами
Для обеспечения работы мощных электроприводов применяются синхронные электродвигатели. Они нашли применение в компрессорных установках, насосах, в системах, прокатных станах, вентиляторах. Применяются в металлургической, цементной, нефтегазовой и других отраслях промышленности, где необходимо использовать оборудование большой мощности. В этой статье мы решили рассказать читателям сайта Сам Электрик, как может выполняться пуск синхронных двигателей.
Преимущества и недостатки
Конструктивно синхронные двигатели сложнее асинхронных, но они имеют ряд преимуществ:
- Работа синхронных электродвигателей в меньшей степени зависит от колебания напряжения питающей сети.
- По сравнению с асинхронными, они имеют больший КПД и лучшие механические характеристики при меньших габаритах.
- Скорость вращения не зависит от нагрузки. То есть колебания нагрузки в рабочем диапазоне не влияют на обороты.
- Могут работать со значительными перегрузками на валу. Если возникают кратковременные пиковые перегрузки, повышением тока в обмотке возбуждения компенсируют эти перегрузки.
- При оптимально подобранном режиме тока возбуждения, электродвигатели не потребляют и не отдают в сеть реактивную энергию, т.е. cosϕ равен единице. Двигатели, работая с перевозбуждением, способны вырабатывать реактивную энергию. Что позволяет их использовать не только в качестве двигателей, но и компенсаторов. Если необходима выработка реактивной энергии, на обмотку возбуждения подается повышенное напряжение.
При всех положительных качествах синхронных электродвигателей у них имеется существенный недостаток – сложность пуска в работу. Они не имеют пускового момента. Для запуска требуется специальное оборудование. Это долгое время ограничивало использование таких двигателей.
Способы пуска
Пуск синхронных электродвигателей можно осуществить тремя способами – с помощью дополнительного двигателя, асинхронный и частотный запуск. При выборе способа учитывается конструкция ротора.

Он выполняется с постоянными магнитами, с электромагнитным возбуждением или комбинированным. Наряду с обмоткой возбуждения на роторе смонтирована короткозамкнутая обмотка – беличья клетка. Её также называют демпфирующей обмоткой.

Запуск с помощью разгонного двигателя
Этот метод пуска редко применяется на практике, потому что его сложно реализовать технически. Требуется дополнительный электродвигатель, который механически соединен с ротором синхронного двигателя.
С помощью разгонного двигателя раскручивается ротор до значений близких к скорости вращения поля статора (к синхронной скорости). После чего на обмотку возбуждения ротора подают постоянное напряжение.
Контроль осуществляется по лампочкам, которые включены параллельно рубильнику, подающему напряжение на обмотки статора. Рубильник должен быть отключен.
В первоначальный момент лампы мигают, но при достижении номинальных оборотов они перестают гореть. В этот момент подают напряжение на обмотки статора. После чего синхронный электродвигатель может работать самостоятельно.
Затем дополнительный мотор отключается от сети, а в некоторых случаях его отсоединяют механически. В этом состоят особенности пуска с разгонным электродвигателем.
Асинхронный запуск
Метод асинхронного пуска на сегодня самый распространенный. Такой запуск стал возможен после изменения конструкции ротора. Его преимущество в том, что не нужен дополнительный разгонный двигатель, так как дополнительно к обмотке возбуждения в ротор вмонтировали короткозамкнутые стержни беличьей клетки, что дало возможность запускать его в асинхронном режиме. При таком условии этот способ пуска и получили широкое распространение.
Сразу же рекомендуем просмотреть видео по теме:
При подаче напряжения на обмотку статора происходит разгон двигателя в асинхронном режиме. После достижения оборотов близких к номинальным, включается обмотка возбуждения.
Электрическая машина входит в режим синхронизма. Но не все так просто. Во время пуска в обмотке возбуждения возникает напряжение, которое возрастает с ростом оборотов. Оно создает магнитный поток, который воздействует на токи статора.
При этом возникает тормозящий момент, который может приостановить разгон ротора. Для уменьшения вредного воздействия обмотки возбуждения подключают к разрядному или компенсационному резистору. На практике эти резисторы представляют собой большие тяжелые ящики, где в качестве резистивного элемента используются стальные спирали. Если этого не сделать, то из-за возрастающего напряжения может произойти пробой изоляции. Что повлечет выход оборудования из строя.
После достижения подсинхронной частоты вращения, от обмотки возбуждения отключаются резисторы, и на нее подается постоянное напряжение от генератора (в системе генератор-двигатель) или от тиристорного возбудителя (такие устройства называются ВТЕ, ТВУ и так далее, в зависимости от серии). В результате чего двигатель переходит в синхронный режим.
Недостатками этого метода являются большие пусковые токи, что вызывает значительную просадку напряжения питающей сети. Это может повлечь за собой остановку других синхронных машин, работающих на этой линии, в результате срабатывания защит по низкому напряжению. Для уменьшения этого воздействия цепи обмоток статора подключают к компенсационным устройствам, которые ограничивают пусковые токи.
- Добавочные резисторы или реакторы, которые ограничивают пусковые токи. После разгона они шунтируются, и на обмотки статора подается сетевое напряжение.
- Применение автотрансформаторов. С их помощью происходит понижение входного напряжения. При достижении скорости вращения 95-97% от рабочей, происходит переключение. Автотрансформаторы отключаются, а на обмотки подается напряжение сети переменного тока. В результате электродвигатель входит в режим синхронизации. Этот метод технически более сложный и дорогостоящий. А автотрансформаторы часто выходят из строя. Поэтому на практике этот метод редко применяют.
Частотный пуск
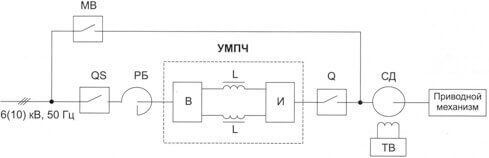
Частотный пуск синхронных двигателей применяется для запуска устройств большой мощности (от 1 до 10 МВт) с рабочим напряжением 6, 10 Кв, как в режиме легкого запуска (с вентиляторным характером нагрузки), так и с тяжелым пуском (приводов шаровых мельниц). Для этих целей выпускаются устройства мягкого частотного пуска.
Принцип работы аналогичен высоковольтным и низковольтным устройствам, работающим по схеме преобразователя частоты. Они обеспечивают пусковой момент до 100% от номинала, а также обеспечивают запуск нескольких двигателей от одного устройства. Пример схемы с устройством плавного пуска вы видите ниже, оно включается на время запуска двигателя, а затем выводится из схемы, после чего двигатель включается в сеть напрямую.
Системы возбуждения
До недавнего времени, для возбуждения применялся генератор независимого возбуждения. Он располагался на одном валу с синхронным электродвигателем. Такая схема еще применяется на некоторых предприятиях, но она устарела и теперь не применяется. Сейчас для регулировки возбуждения используются тиристорные возбудители ВТЕ.
- оптимальный режим пуска синхронного двигателя;
- поддержание заданного тока возбуждения в заданных пределах;
- автоматическое регулирование напряжения возбуждения в зависимости от нагрузки;
- ограничение максимального и минимального тока возбуждения;
- мгновенное увеличение тока возбуждения при понижении питающего напряжения;
- гашение поля ротора при отключении от питающей сети;
- контроль состояния изоляции, с оповещением о неисправности;
- обеспечивают проверку состояния обмотки возбуждения при неработающем электродвигателе;
- работают с высоковольтным преобразователем частоты, обеспечивая асинхронный и синхронный запуск.
Эти устройства отличаются высокой надежностью. Основным недостатком является высокая цена.
В заключение отметим, что самый распространенный способ пуска синхронных двигателей — это асинхронный запуск. Практически не нашел применения пуск с помощью дополнительного электродвигателя. В то же время частотный запуск, который позволяет в автоматическом режиме решить проблемы пуска, довольно дорогостоящий.
Материалы по теме:
- Как выбрать частотный преобразователь
- Плавное включение ламп накаливания
- Как устроен асинхронный двигатель
Опубликовано 15.07.2019 Обновлено 17.06.2021 Пользователем Александр (администратор)
Синхронный двигатель с постоянными магнитами
Синхронный двигатель с постоянными магнитами (англ. permanent magnet synchronous motor, PMSM) — это синхронный электродвигатель, индуктор которого состоит из постоянных магнитов.
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
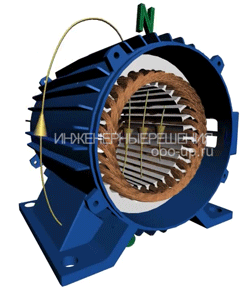
Конструкции и типы синхронного электродвигателя с постоянными магнитами
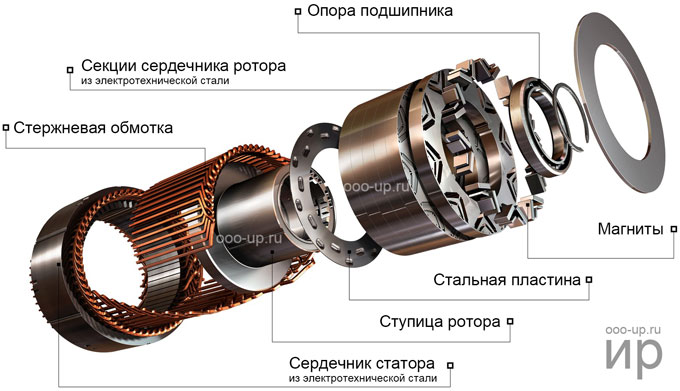
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Синхронный электродвигатель со встроенными постоянными магнитами
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.
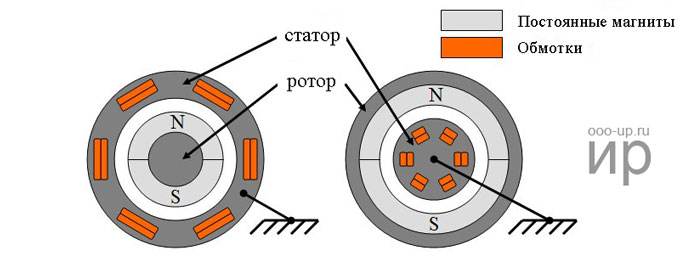
Конструкции синхронного двигателя с постоянными магнитами: слева — стандартная, справа обращенная.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
-
По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
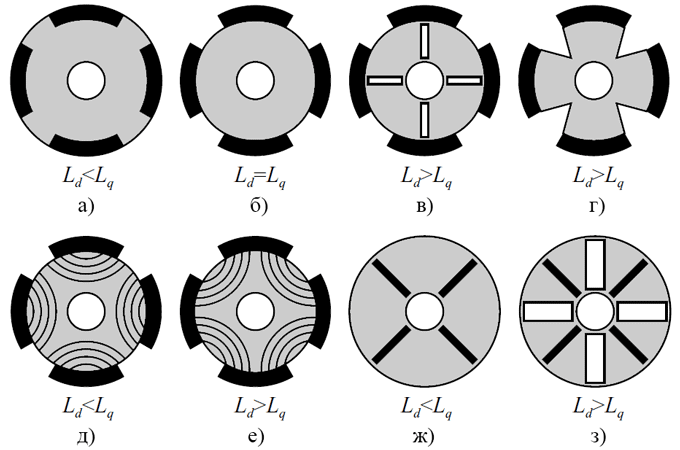
Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
-
Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).
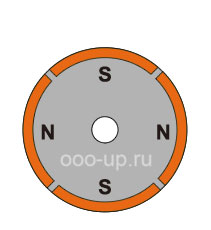
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
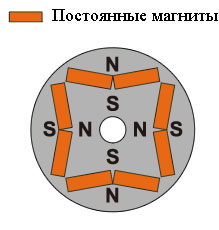
Ротор синхронного двигателя со встроенными магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
-
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.

Статор электродвигателя с распределенной обмоткой

Статор электродвигателя с сосредоточенной обмоткой
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].
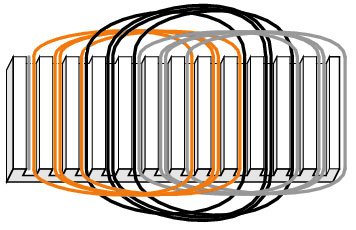
Схема трехфазной распределенной обмотки
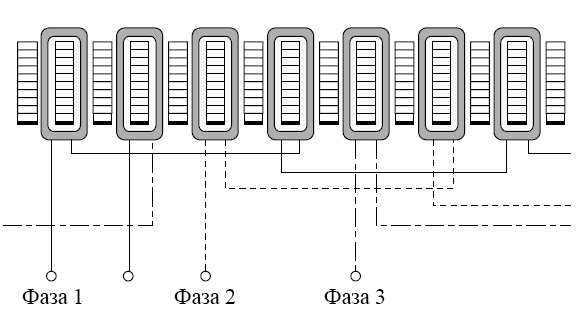
Схема трехфазной сосредоточенной обмотки
-
Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.
Остановить
Вращающееся магнитное поле синхронного электродвигателя
Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Популярные способы управления синхронным двигателем с постоянными магнитами
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
-
Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.
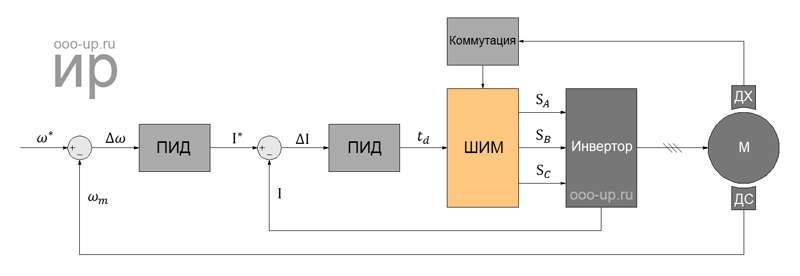
Трапециидальное управление по датчикам Холла
Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
-
Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
-
В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.
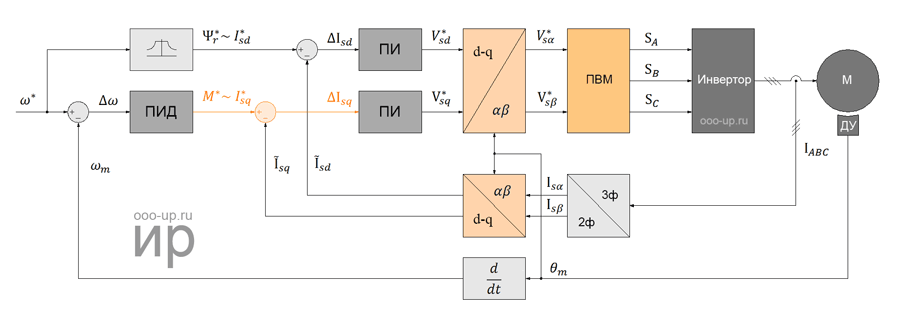
Полеориентированное управление синхронным двигателем с постоянными магнитами по датчику положения ротора
Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
-
Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.
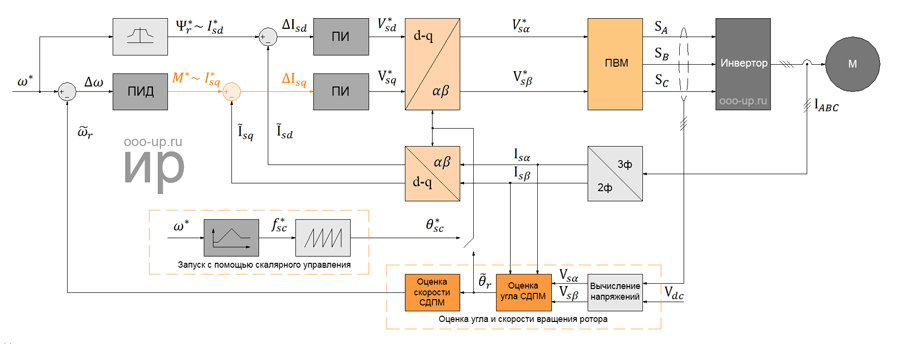
Полеориентированное управление синхронным двигателем с постоянными магнитами без датчика положения ротора со скалярным запуском
На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.