Лекция № Тема «Манипуляторы и промышленные роботы»
Манипулятор – это совокупность пространственно-рычажного механизма и системы приводов, осуществляющая под управлением программируемого автоматического устройства или человека-оператора действие (манипуляция) аналогичные действиям руки человека.
Промышленный робот – автоматическая машина, состоящая из манипулятора и устройства программного управления его движениями, предназначенная для замены человека при выполнении основных и вспомогательных операций в промышленных процессах.
Под промышленным роботом понимается перепрограммируемый манипулятор, способный автоматически выполнять комплекс действий, предусмотренных программой.
Промышленный робот включает в себя основные элементы:
- манипуляционные устройства;
- систему управления;
- чувствительные элементы;
- средства передвижения.
Манипуляционные устройства робота – это исполнительные органы, имитирующие действие человеческих рук в натуральном масштабе с любым увеличением или уменьшением, а также усилием по мощности.
Система управления (с ЭВМ или без нее) может иметь несколько уровней, аналогично различным ступеням нервной системы человека.
Чувствительные элементы дают необходимые сигналы в систему управления о приближении руки к предметам, прикосновению и т.д., которые позволяют роботу ориентироваться нужным образом для достижения определенных целей.
Средства передвижения роботов в зависимости от его назначения делятся на:
- шагающие механизмы;
- устройства на колесах;
- устройства на гусеницах;
- комбинация всех трех способов.
Назначение и область применения
Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных технологических операций в процессе промышленного производства.
При внедрении промышленных роботов решается важная социальная задача: освобождение человека от работ, связанных с опасностями для здоровья или с тяжелым физическим трудом, а также от освобождения человека от простых монотонных операций, не требующих высокой квалификации.
Копирующие манипуляторы, управляемые человеком-оператором необходимы при выполнении различных работ с радиоактивными материалами; при выполнении работ в космосе, под водой, в химически активных средах.
Манипуляторы и промышленные роботы применяются во вредных условиях производства: сварка, окраска, дробеструйная обработка, при покрытии деталей на операциях гальваники и при сортировке и транспортировании тяжелых деталей, на сборочных операциях.
Классификация промышленных роботов
Промышленные роботы классифицируются по следующим признакам:
- По характеру выполняемых технологических операций;
- основные;
- вспомогательные;
- универсальные;
- литейные;
- сварочные;
- кузнечно-прессовые;
- для механической обработки;
- сборочные;
- окрасочные;
- транспортно-складские;
- По системе координат руки манипулятора;
- прямоугольная;
- цилиндрическая;
- сферическая;
- сферическая угловая (ангулярная);
- другие (полярная, пространственная);
- По числу подвижностей манипулятора;
от двух до шести;
- По грузоподъемности;
- сверхлегкие (до 10 Н);
- легкие (до 100 Н);средние (до 2000 Н);
- тяжелые (до 10000 Н);
- сверхтяжелые (свыше 10000 Н);
- По типу силового привода;
- электромеханические;
- пневматические;
- гидравлические;
- комбинированные;
- По степени подвижности основания;
- мобильные;
- стационарные;
- По виду программы;
- с тяжелой программой;
- перепрограммируемые;
- адаптивные;
- с элементами искусственного интеллекта;
- По характеру программирования;
- позиционные;
- контурные;
- комбинированные.
МАНИПУЛЯЦИОННЫЕ МЕХАНИЗМЫ
Робототехника — новое направление науки и техники, связанное с созданием и применением робототехнических систем. Робот, являющийся одним из основных объектов изучения в этой науке, представляет собой ав томатическую машину для воспроизведения двигательных и интеллекту альных функций человека. Существуют различные классы роботов, среди которых важнейшими являются автоматические манипуляторы. Частный вид этих роботов — промышленные манипуляционные механизмы. На сегодняшний день промышленные роботы и подобное им обору дование являются практически единственным средством автоматизации мелкосерийного производства. Важная особенность промышленных ро ботов состоит в том, что они позволяют наиболее просто совместить в едином цикле как транспортные, так и основные технологические опера ции, что позволяет создать на базе универсального оборудования гибкие автоматизированные производства. Среди всех частей промышленного робота исполнительное устрой ство — механизм, обеспечивающий движение рабочего органа, — имеет определяющее значение. Именно от этого устройства во многом зави сят такие важные характеристики робота, как быстродействие, манев ренность, точность позиционирования, возможность работы в стесненных пространствах. 17.1. Классификация, назначение и области применения История механики богата примерами, которые свидетель ствуют о постоянном стремлении человека создать механизмы и устройства, подобные живым существам. Это стремление обусловлено многими причинами, среди которых не последнее место занимает желание заменить человека при выполнении сложной и вредной работы. В 40-х годах в связи с потребно стями атомной технологии появились манипуляторы, основное назначение которых — выполнение разнообразных технологи ческих операций с радиоактивными веществами. Применение
таких устройств позволило удалить человека из опасной зо ны, за ним остались только функции дистанционного управ ления. Первыми такой манипулятор разработали сотрудни ки Аргонской национальной лаборатории США. Манипулятор под названием «Master-Slave» состоял из исполнительной ме ханической руки (Slave), помещаемой в опасную зону, и зада ющей механической руки (Master), которой в безопасной зоне манипулировал оператор. Исполнительная рука отличалась от задающей только наличием схвата. Связь между ними осу ществлялась кинематическими передачами так, что звенья ис полнительной руки копировали движения задающей. Отсюда название манипулятора — копирующий. В наше время на смену малоэффективным устройствам прошлого пришли более эффективные автоматически дей ствующие робототехнические устройства. В основе созда ния современных робототехнических устройств лежат новые технологии, получившие развитие лишь во второй половине XX в.: вычислительная техника и информатика. Робототех нические устройства стали важным средством комплексной автоматизации промышленного производства, они позволяют наиболее просто совместить в едином цикле как погрузочноразгрузочные, так и основные технологические операции. Наи более важные применения автоматических роботов связывают с разработкой и созданием автоматизированных участков, це хов и заводов. Точного и однозначного определения робота не существу ет. Скорее всего, можно говорить о целой группе опреде лений. Наиболее полно сущность роботов можно отразить, определив их как программируемые устройства (машины), предназначенные для воспроизведения рабочих функций ру ки человека в процессе его трудовой деятельности. Понятие «программируемые» играет немаловажную роль: оно показы вает, что действие робота не сводится к решению какой-то од ной задачи — его функции можно целенаправленно изменять. Большинство современных роботов включают в себя компью теры, которые помогают реализовать заданные программные действия. В данной главе рассмотрены манипуляционные механиз мы. Манипуляционным механизмом называют техническое
устройство (машину), предназначенное для выполнения ра бот универсального характера, исполнительными устройства ми которого служат манипуляторы (механические руки). В зависимости от степени участия человека в управлении мани пуляционные роботы подразделяются на три типа: автомати ческие, биотехнические и интерактивные. Автоматические манипуляционные механизмы возникли и развились из систем программного управления станками. Процесс управления их действиями может происходить с уча стием и без непосредственного участия человека. Функцио нальная схема автоматического манипуляционного механизма представлена на рис. 17.1. Манипуляционный робот состоит из манипулятора, исполнительных устройств, устройств очув ствления, устройств связи с оператором и компьютером. Ма нипулятор имитирует движения руки человека и представля ет собой многозвенный разомкнутый механизм с одиоподвижными вращательными и поступательными кинематическими парами. Число степеней подвижности манипуляторов изменя ется в пределах от 3 до 10. Функцию кисти в манипулято ре выполняет так называемый схват, конструкция которого предусматривает выполнение операций с определенным типом объектов манипулирования. Информационная система пред назначена для сбора информации о состоянии внешней среды.
В качестве ее элементов используются телевизионные, ультра звуковые, тактильные и другие датчики. Управляющая сис тема служит для выработки законов управления приводами исполнительных органов на основании созданных алгоритмов и собранной информации. В автоматических манипуляционных механизмах мож но выделить три разновидности в зависимости от связи с человеком-оператором: программные, адаптивные и интеллек туальные. Программные манипуляционные механизмы работают по жесткой программе, заложенной в устройстве памяти, одна ко их можно перенастраивать на работу с другой жесткой программой действий. Их также называют автоматически ми программными манипуляторами или промышленными ро ботами. Простота изменения программы, т.е. возможность переобучения промышленных роботов новым операциям, сде лала эти роботы достаточно универсальными и гибко перена страиваемыми на различные классы задач. Адаптивные манипуляционные механизмы отличаются от программных большим количеством внешних (оптических, те левизионных, тактильных) и внутренних датчиков. Системы управления роботами этого типа более сложные, не ограни чиваются только работой по жесткой программе движения и могут в зависимости от внешних условий несколько коррек тировать ее. Как правило, они требуют для своей реализа ции управляющую ЭВМ. Важной частью адаптивных мани пуляционных механизмов является их развитое программное обеспечение, предназначенное для обработки информации, по ступающей от внешних и внутренних датчиков и оператив ного изменения программы движения. Благодаря способности воспринимать изменения во внешней среде и приспосабливать ся к существующим условиям функционирования, адаптивные манипуляционные механизмы могут манипулировать с неори ентированными деталями произвольной формы и производить сборочные операции. Характерной особенностью интеллектуальных роботов является их способность вести диалог с человеком, распозна вать и анализировать сложные ситуации, планировать движе ния манипулятора и осуществлять их реализацию в условиях
ограниченной информации о внешней среде. Все это обеспечи вается совершенством управляющих систем, включающих в себя элементы искусственного интеллекта, способность к обу чению и адаптации в процессе работы. Биотехнические манипуляционные механизмы берут свое начало от копирующих и командных механических систем. Операции, которые могут выполнять роботы этого типа, явля ются менее определенными, чем технологические операции, осуществляемые автоматическими роботами. Широкое рас пространение они получили при работе с радиоактивными ма териалами. Управление манипуляторами этого типа роботов осуще ствляется оператором, а ЭВМ используется для облегчения его работы. Различают три разновидности управления биотехни ческими манипуляционными механизмами: копирующее, ко мандное и полуавтоматическое. Копирующее управление осу ществляется с помощью задающего устройства, кинематиче ски подобного исполнительной руке робота. Такие системы называют копирующими манипуляторами. Человек-оператор перемещает задающее устройство, а манипулятор повторяет эти движения одновременно по всем степеням подвижности. В случае командного управления оператор с командного устрой ства дистанционно задает движение звеньям манипулятора путем поочередного включения соответствующих приводов. При полуавтоматическом управлении оператор, манипулируя управляющей рукояткой, имеющей несколько степеней свобо ды, задает движение схвата манипулятора. ЭВМ по сигналу от управляющей рукоятки формирует сигналы управления на приводы всех звеньев манипулятора. Существуют также био технические системы, в которых управление осуществляется при помощи биоимпульсов от соответствующих мышц челове ческой руки. Интерактивные манипуляционные механизмы отличают ся активным участием человека в процессе управления, ко торое выражается в различных формах взаимодействия его с ЭВМ. Здесь также различают три разновидности управления: автоматизированное, супервизорное и диалоговое. При автоматизированном управлении простые операции робот выполняет без управляющего воздействия со стороны
оператора, а остальные — при участии оператора в биотех ническом режиме. Супервизорное управление отличается тем, что весь цикл операций разбивается на части, выполняемые манипуляционным роботом автоматически, но переход от од ной части к другой осуществляется оператором путем подачи соответствующих команд. При диалоговом управлении опера тору предоставляется возможность совместно принимать ре шения и управлять манипулятором в сложных ситуациях. 17.2. Кинематические схемы, структура и технические характеристики манипуляторов Первый вопрос, с которым сталкивается создатель мани пулятора, — выбор его кинематической и структурной схемы. В процессе выполнения операций с объектом манипулирова ния в большинстве случаев манипуляторы имитируют движе ние рук человека. Поэтому структурная схема манипулятора должна обладать кинематическими характеристиками, анало гичными характеристикам руки человека. Подвижности, име ющиеся у руки человека (без учета подвижностей пальцев), можно обеспечить с помощью пространственной кинематиче ской цепи, у которой к неподвижному звену 4 (аналог лопатка) посредством различных кинематических пар присоединяются звенья (рис. 17.2, а, б): трехподвижной парой А — звено 1 (пле чо), через одноподвижную пару В — звено 2 (предплечье) — и трехподвижной парой 3 (кисть). Используя для оценки сте пени подвижности руки человека формулу Малышева (3.1) без учета движения кисти (пальцев и фаланг), получим W — 7; с учетом всех звеньев и в самой кисти имеем W = 27. Опыт работы с неориентированными объектами показы вает, что манипулятор должен иметь по крайней мере семь (и более) степеней подвижности. Три степени необходимы для перемещения инструмента в любую точку зоны обслуживания, а три — для ориентации инструмента, например схвата элек трода, краскораспылителя и т.п. Как минимум одна степень подвижности должна быть у схвата. Каждая степень подвижности манипуляционного механиз ма управляется индивидуальным приводом, в результате чего
Рис. 17.2 исполнительный орган получает вполне определенное движе ние. В современных манипуляторах используют электромеха нические, гидравлические, пневматические или комбинирован ные приводы. Манипулятор предназначен для замены физических функ ций руки человека, поэтому у него можно выделить три основ ные группы движений: глобальные, региональные и локаль ные. Глобальные движения осуществляются путем перемеще ния подвижного основания манипулятора с помощью двига тельной системы. В стационарных манипуляторах глобальные движения отсутствуют. Их станины неподвижно крепятся к
полу, кронштейну или потолку возле технологического обору дования. Региональные движения — перемещения схвата робота в различные зоны рабочего пространства, определяемого разме рами звеньев манипулятора. Локальные движения — перемещения схвата, соизмеряе мые с его размерами, в частности ориентация в малой зоне рабочего пространства. Иногда глобальные и региональные движения называют транспортирующими движениями, а локальные — ориентиру ющими. Существует большое количество схем манипуляторов, различным образом реализующих региональные движения, но наиболее распространенными в промышленности являются пять следующих схем с одноподвижными кинематическими па рами: манипулятор (рис. 17.3), функционирующий в декартовой (прямоугольной) системе координат, прост в управлении и от личается высокой точностью действий. Схват манипулятора поступательно перемещается вдоль трех основных осей: ж, у и z (т.е. слева-направо, вперед-назад и вверх-вниз); г
манипулятор (рис. 17.4), работающий в цилиндрической системе координат. Его схват может выдвигаться и втяги ваться, а также перемещаться вверх и вниз вдоль стойки. Кро ме того, весь узел манипулятора может поворачиваться вокруг оси основания, но не на полный оборот, что позволяет ему вы полнять операции в окружающей цилиндрической зоне; манипулятор (рис. 17.5), действующий в сферической (или полярной) системе координат. Его схват может выдвигать ся и втягиваться. Вертикальные перемещения манипулятора достигаются путем поворота его в вертикальной плоскости и «плечевом» суставе. Весь узел манипулятора может также
Рис. 17.6 поворачиваться вокруг оси основания. Зона действия подобно го манипулятора представляет усеченную сферу. Первые мо дели промышленных роботов были сконструированы именно по этому принципу; шарнирный манипулятор (рис. 17.6), действующий в ангулярной системе координат, не имеет поступательных кине матических пар, а имеет только вращательные кинематиче ские пары. Манипулятор такого типа очень напоминает руку человека, поскольку имеет «плечевое» и «локтевое» сочле нения, а также «запястье». Его зона обслуживания значи тельно больше, чем у роботов других типов. Он способен об ходить препятствия гораздо более разнообразными путями и даже складываться, но вместе с тем он исключительно сложен в управлении. Манипулятор системы SCARA (рис. 17.7), имеющий свое образную схему, представляет собой вариант манипулятора с цилиндрической системой координат. Все кинематические па ры этого манипулятора располагаются в горизонтальной плос кости, благодаря чему механизм способен разворачиваться по добно складной ширме. Его зона обслуживания имеет цилинд
рическую форму. Перспективными представляются манипуляционный ме ханизм еще двух типов. Первый из них «Spine» (рис. 17.8) спроектирован специалистами фирмы «Спайн роботикс». В нем используется длинный хоботоподобный манипулятор, Рис. 17.8 состоящий из множества чечевицеобразных дисков, которые соединены между собой двумя парами тросов, обеспечиваю щих натяжение. Тросы соединены с поршнями гидравличе ских цилиндров, которые, создавая натяжение, вызывают ле-
ремещение манипулятора. Специальные датчики передают на систему управления информацию о положении манипулятора и его кисти. Такой манипулятор отличается чрезвычайно боль шой гибкостью, значительным радиусом действия и высокой маневренностью. Другой манипуляционный механизм маятникового типа IR В1000 разработан специалистами фирмы ASEA; его манипуля тор подвешен подобно маятнику с двойным карданным подве сом и может перемещаться по направляющим относительно продольной и поперечной осей. По утверждению специалистов фирмы ASEA, это устройство движется в 1,5 раза быстрее, чем традиционные манипуляторы, что обеспечивает высокую производительность. Кинематическую цепь, реализующую локальные движе ния, называют кистью манипулятора, поскольку она выполня ет функции, аналогичные функциям кисти руки человека. На значение кисти — обеспечить ориентирующие движения. Для удержания объекта манипулирования кисть снабжается схватом. Существует столько же типов схватов, сколько и обла стей применения манипуляторов. Конструкции схватов могут представлять собой устройства от обыкновенных клещей для захвата предметов двумя или несколькими губками до специ ально сконструированных схватов, в гнезда которых устанав ливаются сменные инструменты для выполнения ряда техно логических операций, таких, как сверление, нарезание резьбы, сварка, резка, окраска и т.д. Рассмотрим основные геометро-кинематические и струк турные характеристики манипуляторов, к которым прежде всего относят число степеней подвижности, форму и размеры рабочей зоны, маневренность, угол и коэффициент сервиса. Число степеней подвижности схвата манипулятора можно подсчитать как сумму подвижностей всех пар открытой кине матической цепи. Сказанное не противоречит формуле Малы шева (3.1) для пространственных механизмов, так как в от крытых цепях число подвижных звеньев всегда равно числу кинематических пар.
Для рассмотренных механизмов манипуляторов с однопо движными парами (см. рис. 17.3— 17.7) можно использовать формулу W = 6п — 5р! = 6 •3 —5 •3 = 3, где п — число подвижных звеньев; р — число одноподвижных пар. Под маневренностью манипулятора понимают число его степеней подвижности при неподвижном схвате 3. Маневрен ность характеризует возможность кинематической цепи ма нипулятора занимать разные положения при одном и том же положении схвата. Маневренность манипулятора зависит не только от вида и числа кинематических пар, но и от их рас положения. Так, манипулятор, изображенный на рис. 17.9, а, имеет маневренность, равную единице, — это групповая по движность, означающая возможность совместного вращения звеньев 1, 2 вокруг оси АС, проходящей через центры сфе рических пар. Маневренность, равная единице, в этом случае означает, что к заданной точке Е в заданном направлении СЕ схват может подойти при различных положениях остальных звеньев 1, 2, геометрическим местом которых будут кониче ские поверхности с вершинами в точках А и С и образующими АВ и СВ. Если пары А и Б поменять местами (рис. 17.9, б), то число степеней подвижности, согласно формуле Малышева, останет ся прежним: W = 6 п — ^ (6 — i)pi = 6 2 —5 1 —3-2 = 1 , но это местная подвижность, означающая возможность вра щения звена 2 вокруг оси ВС. При этом маневренность будет равна нулю, поскольку в данном случае схват может подойти к заданной точке Е рабочей зоны в заданном направлении СЕ только при одном единственном положении звеньев 1, 2. Повышенная маневренность увеличивает возможности для выполнения сложных операций с объектом манипулиро вания наиболее рациональным путем в условиях наличия Пре пятствий в рабочей зоне, но усложняет задачу управления та ким роботом, поскольку приводит к неоднозначному решению задачи расчета обобщенных координат.
Для некоторых геометрических характеристик промыш ленных манипуляторов ГОСТ 25686-85 вводит ряд определе ний. Исполнительным устройством называют устройство, выполняющее все двигательные функции манипуляционного механизма. Рабочий орган — составная часть исполнительного уст ройства для непосредственного выполнения технологических операций или вспомогательных переходов. Рабочее пространство манипулятора — часть физическо го пространства, в котором может находиться исполнительное устройство при функционировании манипулятора. Рабочая зона — пространство, в котором может находить ся рабочий орган. Не в любой точке рабочей зоны схват может занимать произвольное положение из-за конструктивных ограничений на углы поворота в шарнирах, поэтому рабочая зона реально уменьшается до зоны обслуживания. Зона обслуживания — пространство, в котором рабочий орган выполняет свои функции в соответствии с назначением. Для манипулятора, изображенного на рис. 17.9, а, рабочая зона — пространство между сферами радиусом 74 = AD1 и радиусом г 2 = ADn, а зона обслуживания — лишь часть та кого пространства (штриховая линия на рис. 17.9, а); для ма нипулятора, изображенного на рис. 17.9, б, рабочая зона— тор (кольцо кругового сечения) с размерами r\ = AD1 и г = & D1 (рис. 17.9, в), а зона обслуживания — часть такого тора (штри хованная линия на рис. 17.9, б). Манипулятор с тремя поступательными парами (см. рис. 17.3) имеет рабочую зону в виде прямоугольного парал лелепипеда. Для манипулятора с одной вращательной и ДНумя поступательными парами (см. рис. 17.4) рабочая зона— Коль цевой цилиндрический сектор. В общем случае для каждой точки рабочей зоны манипу лятора существует некоторый телесный угол ф — угол сер виса, внутри которого схват может подойти к этой точке. Как известно, величина телесного угла определяется отноше нием площади сферы, вырезанной телесным углом, к Квад рату радиуса сферы, поэтому максимальное значение угла Фтъх = 47 гг 2 /г 2 = 4тг ср (стерадиан).
Отношение угла ф к его максимальному значению в = = ф(4тг) называют коэффициентом сервиса в данной точке. Ве личина в может изменяться от нуля для точек на Гранине ра бочей зоны, где схват может быть подведен в единственном направлений, до единицы для точек зоны полного сервиса, где схват может быть подведен в любом направлении. Определение значения коэффициента сервиса ф связано с анализом движения звеньев механизма манипулятора при раз личных фиксированных положениях центра схвата. Методику вычисления в рассмотрим на примере манипу лятора с двумя сферическими и одной вращательной парами (см. рис. 17.9, а). Для определения угла сервиса ф в некото рой точке Е рабочей зоны рассмотрим механизм манипулятора как пространственный четырехзвенник со сферическими пара ми Л, С, D и вращательной парой В ; точка D центра схва та совпадает с заданной точкой Е на линии 4 (рис. 17.10, а). Сперва определим возможные положения звена CD (схвата) в плоскости чертежа, а затем все его возможные положения в пространстве путем вращения плоского четырехзвенника от носительно условной стойки AD длиной г, совпадающей с осью х пространственной системы координат Oxyz. В области, где коэффициент сервиса 0 = 1 , угол сервиса ф — 47 г. Следовательно, точка С должна иметь возможность занять любое положение на сфере радиусом DC = /3 с центром в точке D . Для этого в плоском четырехзвеннике звено CD должно быть кривошипом, т.е. поворачиваться на полный обо рот. Как известно (см. § 13.3), условие существования криво шипа состоит в том, что сумма длин самого короткого и самого длинного звеньев должна быть меньше суммы длин остальных звеньев. Если, например, звено 1 самое длинное, а звено 3 са мое короткое, то /1 + /3 < г + /2) откуда rm[n = r\ = 1\ - 12 + 1$ (рис. 17.10, б). Если самое длинное звено AD1 = г, а самое короткое звено
5, то г + / 3 < /1 + 1 2, откуда rmax = r2 = h + h — В пределах от г i до т2 коэффициент сервиса в = 1 (см. рис. 17.10, 5, зона II). Если же звено 3 является коромыслом, то в < 1 . В пре дельных положениях, когда звенья 1, 2, 3 находятся на одной Р ис. 17.10 прямой Ах, 0 = 0. Это имеет место при г = го = l\ —I 2 —h и при г = гз = /1 + /2 + / 3 . Следовательно, в зонах I и III на рис. 17.10, б в 1. В любой промежуточной точке зон I или III, например в точке D 1, можно определить коэффициент сервиса в следую щим образом. Найдя максимально возможный угол поворота с рт коромысла С1D 1, когда звенья АВ1 и В1С1 находятся на од ной прямой, определим поверхность сферического сектора ра диусом R = /3 и углом р = рт (рис. 17.10, в). Формулу по верхности 5 шарового сектора получим путем суммирования элементарных поверхностей dS = 2nR sin pRdp в пределах от Ч>= 0 ДО р = р т : Рт S = J 2 TT R2 sin pdp = 27 г Д2(1 —cos рт).
НЕМНОГО ИСТОРИИ. МАНИПУЛЯТОРЫ
Зарождение робототехники относится к 1940-м годам и связано оно с развитием атомной энергетики. Материалы, используемые в данной области техники, обладают радиоактивностью, и прямой контакт человека с ними недопустим. Для человека опасно также и оборудование для получения и обработки этих материалов. Вместе с тем большой объем научных исследований в области атомной энергетики, задачи практической эксплуатации и ремонта реакторов, обслуживания машин и механизмов, находящихся в радиоактивной зоне, требовали участия человека в их выполнении. Уровень развития автоматизации в то время был недостаточно высок, чтобы говорить о возможности создания автоматов для выполнения разнообразных и часто очень сложных операций по обслуживанию атомной техники. Поэтому были найдены технические решения, позволяющие, с одной стороны, вывести человека из опасной зоны, а с другой — использовать его высокие интеллектуальные и физические возможности при выполнении операций в этих зонах. Машины для выполнения такого рода работ получили название манипуляторов.
Первый манипулятор создали в Аргоннской национальной лаборатории США. Была сконструирована машина многоцелевого назначения, способная выполнять те же действия, что и рука человека. Принцип работы машины определил ее название, которое в точном переводе на русский язык звучит «хозяин-раб». Манипулятор состоял из исполнительной механической руки («раб»), помещенной в опасную зону, и задающей механической руки («хозяин»), на которую воздействует оператор, находящийся в безопасной зоне. Исполнительная рука, отличающаяся от задающей руки только наличием захватного устройства, имела шарнирную конструкцию, а число ее звеньев и соответственно степеней подвижности было достаточным, чтобы устанавливать и ориентировать объект манипулирования в рабочем пространстве любым образом.
В первых конструкциях задающая и исполнительная руки были связаны между собой кинематическими передачами тросового типа так, что звенья исполнительной руки копировали движения звеньев задающей. Механические передачи, связывающие обе руки, являются обратимыми. Оператор через задающую руку воспринимал нагрузку от веса звеньев обеих рук, их инерционности, сил взаимодействия исполнительной руки с объектами манипулирования и преодолевал силу трения в кинематических передачах. Иными словами, помимо функций управления оператор выполнял также и физическую работу, в процессе которой нагрузка на человека, естественно, зависела от технологического процесса в опасной зоне.
В дальнейшем были предприняты попытки избавить оператора от физической нагрузки за счет введения следящих приводов, однако качество системы при этом ухудшилось: вместе с нагрузками на оператора полностью устраняется полезная информация о силах взаимодействия исполнительной руки с объектами манипулирования и теряется возможность выполнять «тонкие» работы, связанные, например, с манипулированием хрупкими объектами. Оператор был лишен своеобразного канала очувствления. Поэтому дальнейшее развитие техники манипуляторов было связано с применением так называемых обратимых по усилию следящих систем, позволяющих сообщать оператору информацию через задающую руку о силовых нагрузках в опасной зоне. При этом, чтобы не нагружать оператора моментами от веса звеньев, руки стали уравновешивать, применяя специальные уравновешивающие механизмы. Одновременно происходило совершенствование самих механических рук, способов и устройств управления [6] (кнопочное, от специальных рукояток, иногда и не похожих на исполнительную руку), манипуляторы оснащали датчиками касания, проскальзывания, усилий и т. д. Словом, манипуляторостроение превратилось в целую отрасль промышленности.
Именно технические достижения в этой отрасли имели основополагающее значение для современной робототехники. Особенно важным оказался опыт, накопленный в области создания исполнительных устройств с широкими двигательными возможностями — универсальных механических рук.
Конечно, рука человека по своей универсальности и возможностям ни в какое сравнение не может идти с механической рукой. Вряд ли когда — нибудь можно будет построить механизм, равный по возможностям руке человека. По данным антропологов, рука человека имеет 27 степеней подвижности, в то время как для произвольного помещения и ориентации объектов в свободном пространстве достаточно иметь механизмы с шестью степенями подвижности. Как правило, наиболее совершенные манипуляторы создают с таким числом степеней подвижности. И даже при такой, сравнительно небольшой подвижности рука получается конструктивно сложной (рис. 1.1), а многие вопросы ее создания требуют серьезных теоретических обоснований.
В настоящее время манипуляторы широко используют не только в атомной промышленности, но и в космосе, в шахтах, под водой и во многих других областях. И всегда в этих системах присутствует человек, выполняющий функции управления. В машиностроительном производстве в тех случаях, когда нецелесообразно автоматизировать технологический процесс в силу его сложности и когда мастерство и опыт оператора в этом процессе имеют важное значение, находят применение копирующие манипуляторы. При их использовании оператор выводится из вредной зоны, обеспечи-
Рис. 1.1. Копирующий манипулятор МЭМ-10СДГ — разработка Института физики высоких энергий (справа — задающая рука, слева — исполнительная)
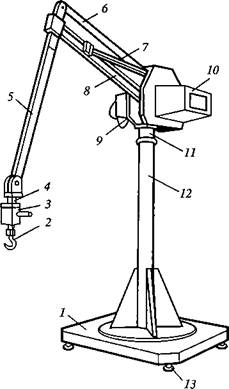
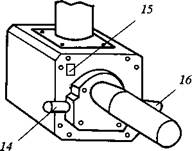
Рис. 1.2. Стацирнарный сбалансированный манипулятор НВ-75А (Япония) грузоподъемностью 75 кг
а — вешний вид; б-узел управления с лицевой стороны; в — узел ручного управления с обратной Стороны; 7 — опорная плита; 2 — крюк для подвески груза; 3 — пульт управления; 4 — узел поворота крюка; 5- «предплечье» руки; 6- верхнее звено параллелограммного механизма («плечо»); 7- пружина уравновешивающего механизма; 8- нижнее звено параллелограммного механизма; 9- узел привода; 10- шкаф системы управления; 11- узел разворота корпуса манипулятора; 12- стойка; 13 — установочная опора; 14 — кнопка управления подъемом груза; 15 — выключатель источника питания; 16- кнопка управления опусканием груза; 17- кнопка включения системы балансирования груза; 18- индикаторная лампа балансирования груза на крюке; 19- кнопка выключения системы балансирования груза
вается многократное «усиление» мускульной энергии оператора, и в то же время технологический процесс ведется с привлечением интеллекта и профессиональных знаний оператора.
В последние годы прошлого века широкое распространение получили сбалансированные манипуляторы (рис. 1.2). Это сравнительно простые манипуляционные системы с ручным управлением, применяемые для механизации тяжелых работ в различных отраслях машиностроения, в частности, для загрузки и выгрузки тяжелых заготовок и изделий (с массой в десятки и сотни килограммов) при их обработке на станках и иных установках, а также для механизации операций сборки и др. [5].
Общей конструктивной особенностью сбалансированных манипуляторов является уравновешивание масс рычагов руки с помощью специальных
пружинных устройств и наличие одного приводного двигателя. Такие манипуляторы управляются рукояткой, расположенной на его конечном звене, которое приспособлено также для быстрой смены присоединяемых к нему специализированных захватных устройств. При повороте управляющей рукоятки в одну сторону груз поднимается, при повороте в другую — опускается. Чем больше угол поворота управляющей рукоятки, тем выше скорость подъема или опускания груза. При освобождении рукоятки она возвращается в нейтральное положение, манипулятор в этот момент автоматически останавливается, поднятый груз остается неподвижным. Усилием оператора весь манипулятор легко поворачивается вокруг вертикальной оси, благодаря чему достигается возможность позиционировать груз в любой точке рабочего пространства. В конструкции предусмотрены устройства, предохраняющие систему от перегрузки, опрокидывания и падения груза при выключении тока или отказах. Источником энергии служит двигатель, автоматически включающийся при наличии вертикальной составляющей усилия, которое оператор прикладывает к управляющей рукоятке. Простота и удобство управления подобными «усилителями» мышечной силы оператора обусловливают их широкое распространение в различных отраслях.
8. Роботы и манипуляторы
Робототехника как новое научно-техническое направление возникла в результате огромного прогресса в развитии вычислительной техники и механики. Роботы представляют новый класс машин, выполняющих одновременно функции рабочих и информационных машин.
Большие успехи автоматизации машиностроения в массовом и крупносерийном производстве на основе использования не перепрограммируемых автоматических устройств позволили получить высокую производительность труда при минимальной себестоимости продукции. Однако 70% современной продукции машиностроения выпускается малыми и средними сериями. В этих условиях не могут быть применены традиционные средства автоматизации, и необходимая гибкость производства достигается за счет использования ручного труда.
Слово «робот» ввел в обращение К.Чапек в своей пьесе «R.U.R.» в 1920 году — так назывались искусственно созданные механические работники, использующиеся на тяжелых физических работах. Чешское слово «robota« означает тяжелый физический труд. Предсказания писателя оказались пророческими – мы являемся свидетелями того, как фантастическая идея реализуется в виде универсального автомата, способного выполнять трудовые функции человека, заменив его на тяжелых, вредных, малоэффективных работах.
Что же такое робот, каково научно-техническое содержание этого термина? Существует большое число определений понятия «робот». Их анализ показывает, что к существенным свойствам робота относят его антропоморфизм (уподобление человеку) при взаимодействии с окружающей средой: универсальность, наличие элементов интеллекта, способность обучаться, наличие памяти, способность самостоятельно ориентироваться в окружающей среде и т.п. На основании указанных свойств сформулировано следующее определение.
Робот — это машина-автомат, предназначенная для воспроизведения двигательных и умственных функций человека, а также наделенная способностью к адаптации и обучению в процессе взаимодействия с внешней средой.
Это машина-автомат нового типа. Обычные автоматы предназначены для многократного выполнения одной и той же операции. Типичными примерами являются станки-автоматы, автоматы для размена монет, продажи билетов, газет и т.д. В отличие от них роботы — универсальные системы многоцелевого назначения; они способны не только выполнять много разных операций, но и оперативно переобучаться с одной операции на другую.
Роботы получили наибольшее распространение в промышленности и прежде всего в машиностроении. Такие роботы называются промышленными.
Уже накоплен определенный опыт эксплуатации промышленных роботов, позволяющий отметить следующие их достоинства.
Повышение безопасности труда — это одно из первоочередных назначений роботов. Известно, что большинство несчастных случаев в промышленности приходится на травмы рук, особенно при загрузочно-разгрузочных операциях. Применение роботов позволяет улучшить условия труда, потенциально опасного для здоровья людей: в литейных цехах, при наличии радиоактивных материалов, вредных химических веществ, при переработке хлопка, асбеста и т.п.
При использовании роботов происходит интенсификация рабочего процесса, повышение производительности труда, стабилизация ее в течение смены, увеличение коэффициента сменности основного технологического оборудования, что улучшает технико-экономические показатели производства. Повышается качество продукции. Так, например, улучшается качество сварного шва в связи со строгим соблюдением технологического режима. Снижаются потери от брака, связанного с ошибками оператора. Возможна также экономия материалов. Например, при окраске автомобиля рабочим только 30 % краски попадает непосредственно на автомобиль, остальная уносится вентиляцией рабочего места. С применением роботов создаются принципиально новые производства и технологические процессы, максимально уменьшающие неблагоприятные воздействия на человека.
Однако эффективность применения робота проявляется только при правильной организации его взаимодействия с обслуживаемым оборудованием и внешней средой. Задача робототехники состоит не только в создании роботов, но и в организации полностью автоматизированных производств.
Внедрение роботов в производство сопряжено с определенными трудностями. Роботы пока еще очень дороги и не всегда достаточно эффективны. Промышленный робот не всегда способен полностью заменить рабочего, обслуживающего технологическое оборудование или совершающего технологическую операцию, а может лишь освободить его от монотонного физического труда, изменив его характер и содержание, приближая к труду наладчика.
8.2. История развития робототехники
Идея создания и использования механического двойника человека зародилась очень давно. Вначале это были культовые статуи, театральные и зрелищные автоматы. В средние века создавались часы с движущимися фигурами, автоматические человекоподобные игрушки в виде писцов и рисовальщиков, некоторые из них дошли до нашего времени. В них использовались механизмы типа часовых, в качестве программных устройств применялись кулачки. Кулачковые механизмы встречались во всех программируемых автоматических механизмах того времени и были наиболее распространены в станках и машинах вплоть до недавнего времени.
В 1805 г. был разработан автоматический ткацкий станок, в котором рисунок задавался, выражаясь современным языком, «перфокартой». Этот метод программирования был использован в первых механических калькуляторах. Перфокарты и сейчас являются одним из способов хранения цифровых данных.
Предшественниками современных роботов явились различные технические устройства для осуществления манипуляционных действий, управляемые человеком. Впервые такие манипуляторы были созданы в 1940—1950 гг. для использования в атомной промышленности. Вначале они приводились в движение за счёт мускульной силы человека, затем были созданы манипуляторы с приводами, но управляемые человеком.
Робототехника возникла в последние два десятилетия, когда были созданы необходимые предпосылки в кибернетике и вычислительной технике. Изобретение компьютера позволило реализовать новый принцип управления. Техника управления с помощью ЭВМ основана на непрерывном сравнении потока данных о реальном состоянии объекта с заданным состоянием. Блоки сравнения и коррекции образуют цепь обратной связи. Принцип управления с обратной связью называется сервоуправлением.
Первый робот «Versatran», предназначенный для практического использования, появился в США в 1962 г. Затем появились роботы «Unimate-1900», получившие применение на заводах фирм «Дженерал Моторс» и «Форд». В 1967 г. начался выпуск этих роботов по лицензии США в Англии, а затем в Японии и Швеции.
В настоящее время около 40 % всех выпускаемых в мире роботов — это простейшие пневматические роботы, примерно столько же роботов с гидравлическим приводом, остальные приходятся на долю электромеханических роботов. Однако ожидается, что в дальнейшем это соотношение изменится в пользу роботов с электроприводом. Динамика роста парка роботов за рубежом в последние годы даже превышает даже оптимистические прогнозы.
В скором времени предполагается широкое внедрение роботов во все сферы деятельности человека, в том числе в сферу обслуживания и домашнего хозяйства.
8.3. Классификация роботов
Современные роботы весьма разнообразны. В широком смысле понятие «робот» включает класс технических систем, которые воспроизводят двигательные и интеллектуальные функции человека. При таком подходе к роботам можно отнести вычислительные и логические машины, машины, играющие в шахматы, сочиняющие музыку, автоматические переводчики, кассиры, автопилоты и т. д. Поэтому все роботы можно разделить на манипуляционные, локомоционные (шагающие, самодвижущиеся, экзоскелетоны), информационные, творчески-игровые. Далее будут рассматриваться только манипуляционные роботы.
Следует различать биотехнические, интерактивные и автоматические роботы.
Биотехническими называются роботы, которые не обладают собственной памятью и непрерывно управляются человеком. Простейшими являются роботы с командным управлением, когда нажатием на кнопку, тумблер или рукоятку человек-оператор пускает в ход привод одной степени подвижности (рис. 8.1,а). Точности этого робота невелика. Такое устройство еще нельзя назвать в полном смысле роботом — это его низшая ступень.
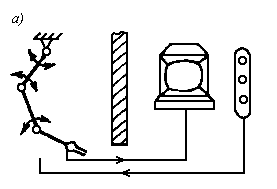
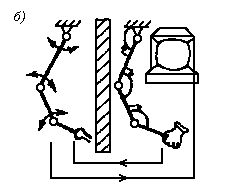
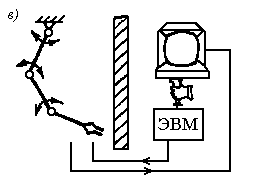
Рис. 8.1 — Способы управления биотехническими роботами:
а — командный; б — копирующий; в — полуавтоматический
Следующий вид биотехнического робота — копирующий робот. Обычно имеется задающее устройство, кинематически подобное руке робота. В его суставах находятся датчики следящих систем, приводы которых размещаются в соответствующих суставах исполнительной руки
(рис.8.1,б). Перемещая рукоятку задающего устройства, оператор создает нужную ориентацию рабочего органа руки. Недостатком такого вида управления является отсутствие обратной связи по усилию: оператор не ощущает действия нагрузки. Чтобы устранить этот недостаток, управляющая рукоятка снабжается автоматическим устройством имитации нагрузки. Тем не менее такой способ управления достаточно утомителен.
В полуавтоматических манипуляторах, в отличие от предыдущих, имеется специализированное вычислительное устройство. Сигнал управления подается человеком с помощью управляющей рукоятки, которая может иметь любую схему; отличающуюся от схемы руки робота (рис. 8.1,в). Нажимая на рукоятку в произвольном направлении, человек-оператор задает направление и скорость движения рабочего органа. Сигналы, снимаемые с рукоятки, поступают в специальное вычислительное устройство, в котором формируются команды для каждой степени подвижности. Такой способ управления более удобен для человека, энергетически экономичнее и менее утомителен.
К интерактивным роботам относятся роботы с системой управления человек—машина.
У автоматизированных интерактивных роботов имеет место чередование биотехнических и автоматических режимов работы. При выполнении некоторых задач робот работает в автоматическом режиме по программе; другие задачи, которые нельзя запрограммировать, реализуются под управлением человека.
При супервизорном управлении человек-оператор наблюдает по экрану обстановку в месте действия робота, подает в управляющую ЭВМ команды, предписывающие перемещения его звеньев. Робот выполняет эти команды в автоматическом режиме. Затем следуют другие команды.
Диалоговое управление осуществляется при взаимодействии ЭВМ с человеком на языках различного уровня, в том числе на языке человека. При этом все манипуляции производятся автоматически, но планирование их осуществляет ЭВМ совместно с человеком. ЭВМ участвует в выработке решений о дальнейших действиях и наилучшем способе управления.
Смысл применения всех интерактивных систем управления — использование интеллекта человека в сложных, непредвиденных ситуациях.
Функциональная схема автоматического робота представлена на рис. 8.2.
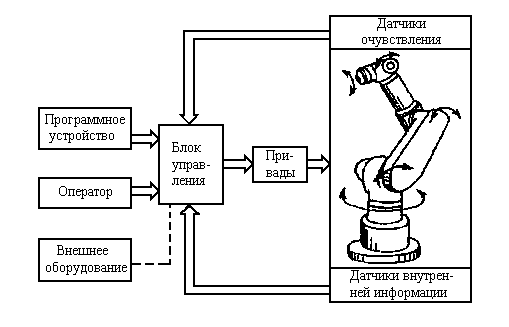
Рис. 8.2 — Функциональная схема автоматического робота
Достаточно развитый робот состоит из трех систем: информационной, управляющей, исполнительной.
Информационная (сенсорная) система, как и органы чувств человека, предназначена для сбора информации о состоянии внешней среды. В качестве ее элементов используются телевизионные, светолокационные, ультразвуковые, тактильные и другие датчики.
Управляющая система, как и мозг человека, служит для выработки законов управления двигателями исполнительных органов на основании существующих предписаний (программ) и собранной информации.
Исполнительная система служит для отработки управляющих сигналов. Она реализуется в виде манипулятора.
Манипулятор — оснащенное рабочим органом механическое устройство, предназначенное для перемещения в пространстве тела (объекта манипулирования), удерживаемого захватом. Манипулятор (лат. «manipulus» — кисть руки) можно рассматривать как аналог руки человека. Его конструкция в большей степени определяет возможности робота.
Возможности руки робота значительно ниже возможностей руки человека, которая обладает 27 степенями подвижности или, если не учитывать движения пальцев руки, 12 степенями подвижности. Число степеней подвижности манипулятора ограничено и обычно не превышает семи.
8.4. Промышленные роботы
Автоматические роботы, получившие распространение в промышленности, называются промышленными роботами (ПР). ГОСТ 25686—85 дает следующее определение этого понятия.
Промышленный робот — это автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства для выполнения в производственном процессе двигательных или управляющих функций.
Промышленные роботы по степени совершенства принято делить на роботы 1, 2 и 3-го поколений.
Роботы 1-го поколения имеют жесткую программу (поэтому они еще называются программными роботами) и требуют точного позиционирования деталей, с которыми работают. Большинство применяемых в настоящее время в промышленности роботов относится к 1-му поколению. Они состоят из манипулятора и программных блоков: генератора машинного времени, устройства считывания, устройства ввода и хранения программы.
Человек-оператор через панель управления задает режим работы (обучения, автоматический, ручного управления, поциклового исполнения программы), осуществляет пуск и остановку робота. Робот может управлять технологическим оборудованием. Темп исполнения программы определяется генератором машинного времени.
Программные устройства могут иметь различные принципы построения и реализовываться на различной элементной базе. В целом они строятся на аналоговых либо на цифровых принципах. В качестве хранителей программы (элементов памяти) используются штекерные панели, штекерные барабаны, кассеты с магнитной лентой и т.п.
Первоначальная программа действий робота записывается в его память, как правило, с помощью человека. Это называется этапом обучения робота. Различают три метода обучения: 1) с помощью настройки механических устройств типа кулачков, конечных переключателей, барабанов — «обучение по точкам»; 2) с помощью пульта управления, как у станков с ЧПУ, — «обучение с пульта», аналитическое программирование; 3) непосредственно рукой оператора — «обучение показом».
Эта информация запоминается, т.е. хранится в элементах памяти, затем по сигналу пуска воспроизводится, считывается и отрабатывается приводами.
Роботы 2-го поколения представляют более совершенные устройства, в определенной степени приспособленные к изменяющейся внешней обстановке и не требующие точного позиционирования деталей. Их поэтому еще называют адаптивными. Роботы 2-го поколения имеют большое преимущество перед роботами 1-го поколения, так как не требуют разработки дополнительных устройств, обладают необходимой гибкостью. Сфера применения таких роботов значительно шире, чем роботов 1-го поколения.
В настоящее время ведутся интенсивные работы по доводке адаптивных роботов до промышленных образцов.
Функциональная схема управления роботом 2-го поколения включает схему управления роботом 1-го поколения, дополненную элементами адаптации. Блоки адаптации включают датчики процесса и блоки коррекции сигналов управляющих устройств. Средства очувствления адаптивных роботов весьма разнообразны. Сравнительно просто реализуется тактильное очувствление. Тактильные датчики устанавливаются непосредственно на рабочих органах — губках схватов. Применяются также локационные датчики, работа которых основана на различных принципах. Чаще всего они могут работать на небольших расстояниях от предметов. Локационные датчики дают возможность еще до соприкосновения с предметом управлять направлением и скоростью сближения.
В качестве сенсорных устройств могут применяться и любые другие датчики, определяющие температуру, цвет предметов, магнитные и электрические свойства, химический состав и т.п.
Роботы 3-го поколения способны воспринимать окружающую обстановку и в зависимости от нее выбирать способ движения для достижения цели, сформулированной в программе в общем виде. Их называют интегральными или интеллектуальными. Такой робот должен уметь строить модели внешней среды на основе информации, получаемой от различных датчиков. Человек по отношению к роботу 3-го поколения выступает уже не как оператор, а как диспетчер (выдает задания, принимает информацию об исполнении).
Термин «поколение» надо понимать лишь как степень развития технических возможностей. Рассматриваемые разновидности роботов не вытесняют друг друга, каждая из них будет существовать наряду с другими при постепенном совершенствовании их элементной базы.
По степени специализации ПР разделяются на специальные, специализированные (целевые) и многоцелевые. Специальным называется робот, предназначенный для выполнения определенных технологических операций или обслуживания конкретной модели технологического оборудования.
Специализированные роботы служат для выполнения технологических операций одного вида (сварка, окраска, сборка и т.п.) или для обслуживания определенной группы моделей технологического оборудования (например, группы моделей станков с горизонтальной осью шпинделя).
Многоцелевые роботы предназначены для выполнения различных основных и вспомогательных технологических операций. Они конструктивно не зависят от обслуживаемого оборудования и характеризуются разнотипностью совершаемых движений.
По выполняемой функции ПР подразделяются на вспомогательные, технологические и универсальные. Вспомогательные роботы выполняют операции типа «взять—перенести». Технологические роботы используются в качестве производящих или обрабатывающих машин на таких операциях, как гибка, сварка, сборка, окраска, контроль и т.п. Универсальными называются роботы, совмещающие функции вспомогательного и технологического роботов.
Под грузоподъемностью ПР понимается наибольшая масса объектов манипулирования (включая массу рабочего органа), которые могут перемещаться рукой робота при заданных условиях (при максимальной или минимальной скорости, при максимальном вылете руки и т.п.). По грузоподъемности ПР делятся на сверхлегкие (до 1 кг), легкие (до 10 кг), средние (до 200 кг), тяжелые (до 1000 кг), сверхтяжелые (свыше 1000 кг).
Рабочая зона манипулятора — это пространство, в котором находится его рабочий орган при всех возможных положениях манипулятора. Рабочая зона характеризуется объемом. По объему рабочей зоны ПР делятся на микророботы, выполняющие особо точные операции с весьма мелкими деталями (например, при производстве изделий микроэлектроники), мини-роботы для точных операций с мелкими деталями (например, при производстве часовых механизмов), малые роботы, предназначенные, например, для операций холодной штамповки, средние роботы для операций, которые рабочие выполняют стоя, крупногабаритные роботы для выполнения операций, превышающих физические возможности человека, и, наконец, мобильные роботы, перемещающиеся по рельсовому пути, монорельсу или как-нибудь иначе.
По числу степеней подвижности ПР подразделяются на роботы с двумя, тремя, четырьмя степенями подвижности и роботы со степенями подвижности более четырех.
По форме рабочей зоны ПР делятся на прямоугольные, цилиндрические, сферические, ангулярные (антропоморфные) и комбинированные (рис.8.3). Это определяется системой координат, с которой совпадает система обобщенных координат манипулятора.
По виду привода ПР подразделяются на электромеханические, гидравлические, пневматические, роботы с комбинированным приводом.
Под программным управлением понимается автоматическое управление исполнительным устройством промышленного робота по заранее введенной управляющей программе. По типу системы управления ПР подразделяются на роботы с позиционным управлением и с контурным управлением.