Как в xplane11 включить реверс тяги двигателя
Примечание: используется ТОЛЬКО для жалоб на спам, рекламу и проблемные сообщения (например, нападки, оскорбления или грубости).
© Valve Corporation. Все права защищены. Все торговые марки являются собственностью соответствующих владельцев в США и других странах. Часть географических сведений на этом сайте предоставлена geonames.org.
Политика конфиденциальности | Правовая информация | Соглашение подписчика Steam | Файлы cookie
Как в xplane11 включить реверс тяги двигателя

X-Plane 11 наверное один из самых мною любимых авиасимуляторов. Разбираюсь в нем я самостоятельно, поэтому прошу не ругать, так сказать, все для новичков.
Начнем с улучшайзеров, а именно с плагинов которые сделают игру лучше:
Better Pushback — лучший буксировщик для X-Рlane.
Terrain radar + Vertical Situation Display — радар поверхности под летящим самолетом.
Ground Handling Deluxe — запускает обслуживающий транспорт.
X-Life Deluxe — добавляет воздушный трафик
Advanced Rendering Options plugin for X-Plane — улучшайзер графики
Airport Navigator Plugin — навигатор по аэропортам
X-RAAS: Runway Awareness and Advisory System — голосовой помощник
Плагины устанавливаются путем их распаковки в папку с игрой X-Plane 11\Resources\plugins\
Полезная ссылка с плагинами.
Еще нам понадобится навигационная база данных AIRAC. Найти ее можно вбив в поисковик Navigraph, AIRAC navigation data, скачать, найти в скаченном архив или папку xplane11_native_1803 или более позднюю, найти в ней файлы и папку CIFP и скопировать их в папку X-Plane 11\Custom Data.
Теперь об управлении:
Flight Controls
Pitch Trim Up
]
Pitch Trim Down
[
Flaps Up (Закрылки вверх)
1
Flaps Down (Закрылки вниз)
2
Speed Brakes Up One (Воздушный тормоз)
Speed Brakes Down One (Воздушный тормоз)
4
Rudder Trim Left
5
Rudder Trim Center
6
Rudder Trim Right
7
Aileron Trim Left
8
Aileron Trim Center
9
Aileron Trim Right
0
Landing Gear Down (Шасси убрать)
CTRL + D
Landing Gear Up (Шасси выпустить)
CTRL + U
Landing Gear Toggle (Шасси)
G
Brakes Toggle Regular (Тормоз)
B
Brakes Toggle Max (Стояночный тормоз)
V
Tailhook Down
ALT + Q
Tailhook Up
ALT + W
Smoke Toggle
X
Canopy Open
ALT + E
Canopy Close
ALT + R
Engines
Throttle Down (Уменьшить тягу)
Throttle Up (Увеличить тягу)
Mixture Down
Mixture Up
Mixture Minimum
Mixture Maximum
Carb Heat On
Carb Heat Off
Carb Heat Toggle
Idle High/Low Toggle
TOGA Power
Beta Toggle
/
Thrust Reverse Toggle
SHIFT + /
Starters
Engage Starter 1
CTRL + 1
Engage Starter 2
CTRL + 2
Engage Starter 3
CTRL + 3
Engage Starter 4
CTRL + 4
Engage Starter 5
CTRL + 5
Engage Starter 6
CTRL + 6
Engage Starter 7
CTRL + 7
Engage Starter 8
CTRL + 8
Weapons
Weapon Target Down
SHIFT + [
Weapon Target Up
SHIFT + ]
Instruments
Panel Brightness Down
SHIFT + CTRL + ,
Panel Brightness Up
SHIFT + CTRL + .
HUD Brightness Toggle
`
Radios
NAV1 Standby Flip
CTRL + 9
NAV2 Stanby Flip
CTRL + 0
COM1 Standby Flip
CTRL + —
COM2 Standby Flip
CTRL + =
Operation
Screenshot
SHIFT + SPACE
Quicktime Record
CTRL + SPACE
Ground Speed Change
ALT + T
Flight-model Speed Change (Ускорить время)
CTRL + T
K
L
Time Down Lots
SHIFT + K
Time Up Lots
SHIFT + L
Contact ATC
RETURN
Fail System
CTRL + F
Cycle Dump
SHIFT + M
Make Panel Previews
SHIFT + ALT + CTRL + SPACE
Create Snap Marker
CTRL + X
Test Data Ref
CTRL + .
Slider 01-16
SHIFT + F1-F16
Replay Toggle
ALT + R
View Commands
Free Camera
C
Forward With Panel (Камера из кабины)
W
Forward With HUD
SHIFT + W
Forward With Nothing
CTRL + W
Linear Spot
SHIFT + 1
Still Spot
SHIFT + 2
SHIFT + 3
SHIFT + 4
SHIFT + 5
SHIFT + 6
Track Weapon
SHIFT + 7
SHIFT + 8
Cockpit Command Look
SHIFT + 9
Cinema Verite
SHIFT + C
Sunglasses
SHIFT + S
Night Vision
SHIFT + N
3D Path Toggle
CTRL + P
3D Path Reset
SHIFT + P
Show Physics Model
CTRL + M
Quick Look 0-9
NUMPAD 0-9
Quick Look Mem 0-9
CTRL + NUMPAD 0-9
General
LEFT ARROW
RIGHT ARROW
UP ARROW
DOWN ARROW
.
,
=
—
SHIFT + LEFT ARROW
Right Fast
SHIFT + RIGHT ARROW
SHIFT + UP ARROW
SHIFT + DOWN ARROW
Forward Fast
SHIFT + .
Backwards Fast
SHIFT + ,
Zoom-in Fast
SHIFT + =
Zoom-out Fast
SHIFT + —
CTRL + LEFT ARROW
Right Slow
CTRL + RIGHT ARROW
CTRL + UP ARROW
CTRL + DOWN ARROW
Forward Slow
CTRL + .
Backwards Slow
CTRL + ,
Zoom-in Slow
CTRL + =
Zoom-out Slow
CTRL + —
R
F
Q
E
Rot Up Fast
SHIFT + R
Rot Down Fast
SHIFT + F
Rot Left Fast
SHIFT + Q
Rot Right Fast
SHIFT + E
Rot Up Slow
CTRL + R
Rot Down Slow
CTRL + F
Rot Left Slow
CTRL + Q
Rot Right Slow
CTRL + E
SPACE
Лично я меняю реверс на клавишу ` (~) которая находится перед клавишей 1. Для этого открываем настройки управления, и ищем Thrust Reverse Toggle.
Еще управление: < >приблизить или отдалить камеру.
Не забудьте переключить клавиатуру на раскладку EN
Теперь построим наш маршрут полета, X-Plane не умеет автоматически их строить как это делает FlightGear, для этого необходимо воспользоваться, сервисами http://onlineflightplanner.org/ или https://flightplandatabase.com/, маршруты мы строим для X-Plane 11. По аналогии с FlightGear я построил прямой маршрут из EDDT в EDDV и сохранил его в папку X-Plane 11\Output\FMS plans\ строил сервисом который указан первым.
Теперь все готово, запускаем игру. Начинаем новый полет, выбираем доступный Boeing 737-800, указываем аэропорт EDDT, можем сразу стать на полосу 26L, или не становиться. И начинаем полет.
После загрузки, откройте меню Plugins, переместив мышку вверх или нажав ESC и убедитесь, что все нужные вам плагины включены в Plugin Admin — Enable/Disable. Если вы находитесь не на полосе, воспользуйтесь плагином Better Pushback что бы отбуксировать самолет в сторону рулежки, Airport Navigator Plugin поможет найти полосу 26L, ее можно так же определить меняя вид камеры Shift + 1..9 смотрите таблицу управление.
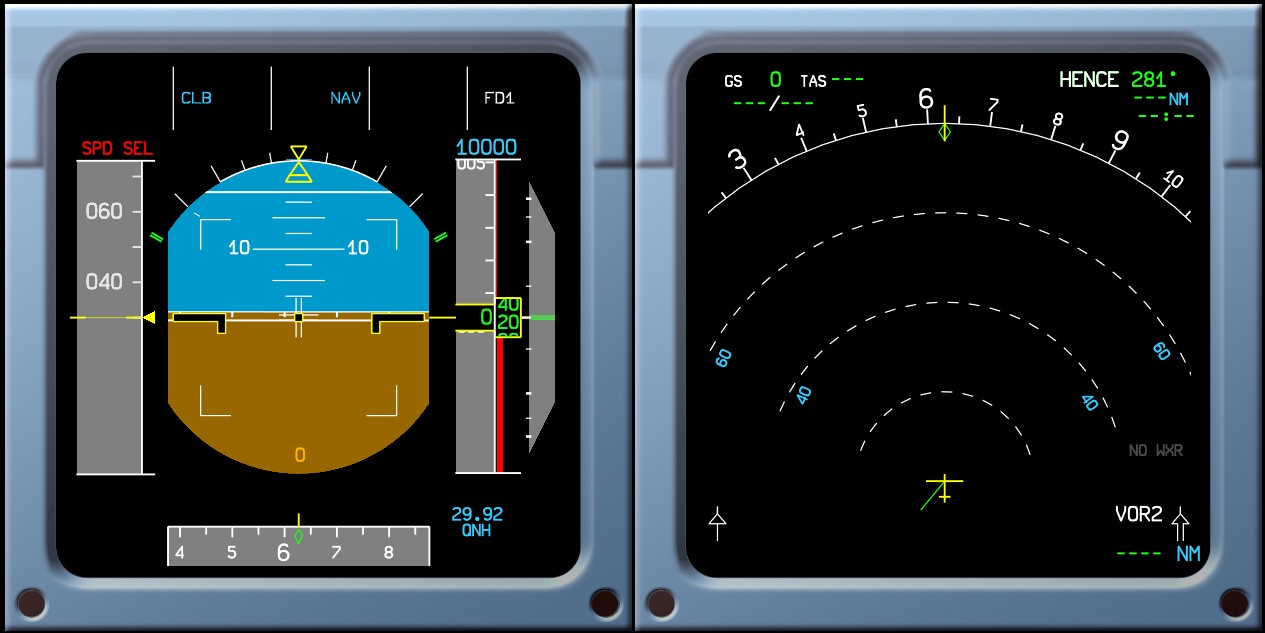
Подготовка к полёту. Считаем, что двигатели у нас запущены и все проверки пройдены. На панели перед собой, включаем F/D ON, устанавливаем скорость IAS/MACH на 200, и правее высоту ALTITUDE 10000. Опускаем взгляд вниз находим табло NAV и в поле STAND BY устанавливаем частоту маяка 108,9.
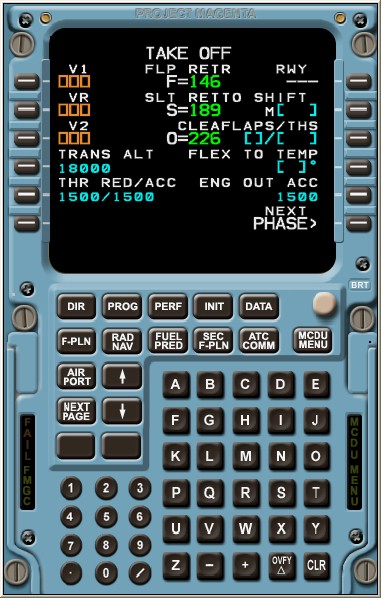
Загружаем карту полета. Ранее мы ее создали и загрузили в X-Plane 11\Output\FMS plans\ На панели FMS жмем кнопку INIT REF, затем на табло ищем ROUTE MENU, затем выбираем CO ROUTE LIST в нем откроются все наши сохраненные в папке планы полета, переключать листы можно кнопками PREV PAGE и NEXT PAGE. Находим наш план и выбираем его, он автоматически отобразится на табло навигации.
Снимаемся со стояночного тормоза «b», немного добавляем тяги клавиша F2 и катимся к полосе, если мы не на ней. Я не спец и не знаю норм, по этому выставляю положение закрылок на взлет в положение 1 (клавиши 1 и 2)
Начинаем взлет. Добавляем тягу F2, и на скорости 160 тянем штурвал на себя, взлетаем, убираем шасси. На 500ft можно включить автопилот, и автомат тяги. На панели жмем LNAV и кнопку CMD, самолет ложится на план полета. Жмем A/T и SPEED включается автомат тяги. Продолжаем набирать высоту, нажимаем V/S теперь устанавливаем 2500 и видим как наш самолет набирает нужную высоту. Убираем закрылки.
Для того, что бы полет приходил быстрее жмем CTRL+T.
После прохождения последней точки начинаем снижение. Переключаемся на 108,9. Выставляем 4200ft жмем V/S устанавливаем -2500 снижаемся, где то за 20NM жмем VOR LOC когда мы попадем в зону маяка самолет начнет выравниваться на полосу при этом на табло отображается 2 розовых ромба, ромб на горизонтальной плоскости выравнивается по центру шкалы, это означает, что самолет находится перед полосой, продолжаем снижение до 2000 — 2200ft одновременно сбрасываем скорость до 140 — 160, на 190 выпускам закрылки в первое положение на 160 во второе на 140 в третье. Можно использовать воздушный тормоз (клавиши 3 и 4 чтобы сбросить скорость). И наблюдаем за ромбом в вертикальной плоскости, когда ромб начнет приближаться к центру шкалы жмем APP, в правом верхнем углу автопилота будет гореть G/S, теперь мы снижаемся по глиссаде на полосу. Выпускаем шасси. В принципе все, самолет может сам сеть. Включаем автоматическое торможение «b» при необходимости запустить реверс. Выключаем автомат тяги, на отметке 40-30 можно чуть приподнять нос, уменьшаем тягу F1. Садимся, когда почти остановились отключаем тормоза. Рулим на рулёжку к аэропорту.
Как включить реверс в x plane 11
Ƈ Αльϕα ҵенͲαβрα Ɓ ᶀ Просветленный (36123) тянутся. значит не за то тянешь..
Остальные ответы
shift + /(возле правого шифта)
Похожие вопросы
Ваш браузер устарел
Мы постоянно добавляем новый функционал в основной интерфейс проекта. К сожалению, старые браузеры не в состоянии качественно работать с современными программными продуктами. Для корректной работы используйте последние версии браузеров Chrome, Mozilla Firefox, Opera, Microsoft Edge или установите браузер Atom.
Как мы строили авиатренажер A320: история в картинках (ч.1)
В прошлом посте я написал о бесценном опыте, полученном при строительстве авиатренажера Boeing B737NBG.
С того поста случилось много разных событий, в частности, Боинг наш пережил капитальный ремонт в режиме цейтнота, и вот наконец у меня дошли руки до написания поста про Аирбас А320.
Я разобью пост на два — один будет в основном про ИТ, а второй — в основном про этапы строительства, со слайдами.
Вводная
- К нам ехали заказанные и изготовленные подвижная платформа и кабина
- Обшивка находилась в производстве
- Заканчивалось проектирование силового каркаса
- Были закуплены и уже стояли на складе проекторы
Первым делом, как это ни странно, я взялся рисовать ИТ-инфраструктуру.
ИТ-инфраструктура
В голове все было просто: в качестве симулятора у нас X-Plane 10 с его возможностями искривлять изображение под цилиндрическую проекцию.
Нужно масштабирование — значит будет пять серверов: один обсчитывает динамику, три — формируют изображение для трёх проекторов, четвертый — генерит картинку для системы видеозаписи роликов для клиентов.
Компоненты Project Magenta занимаются почти всем остальным.
ProjectMagenta
- Рисование картинок на экранах кабины — Airbus Glass Cockpit, ABGC
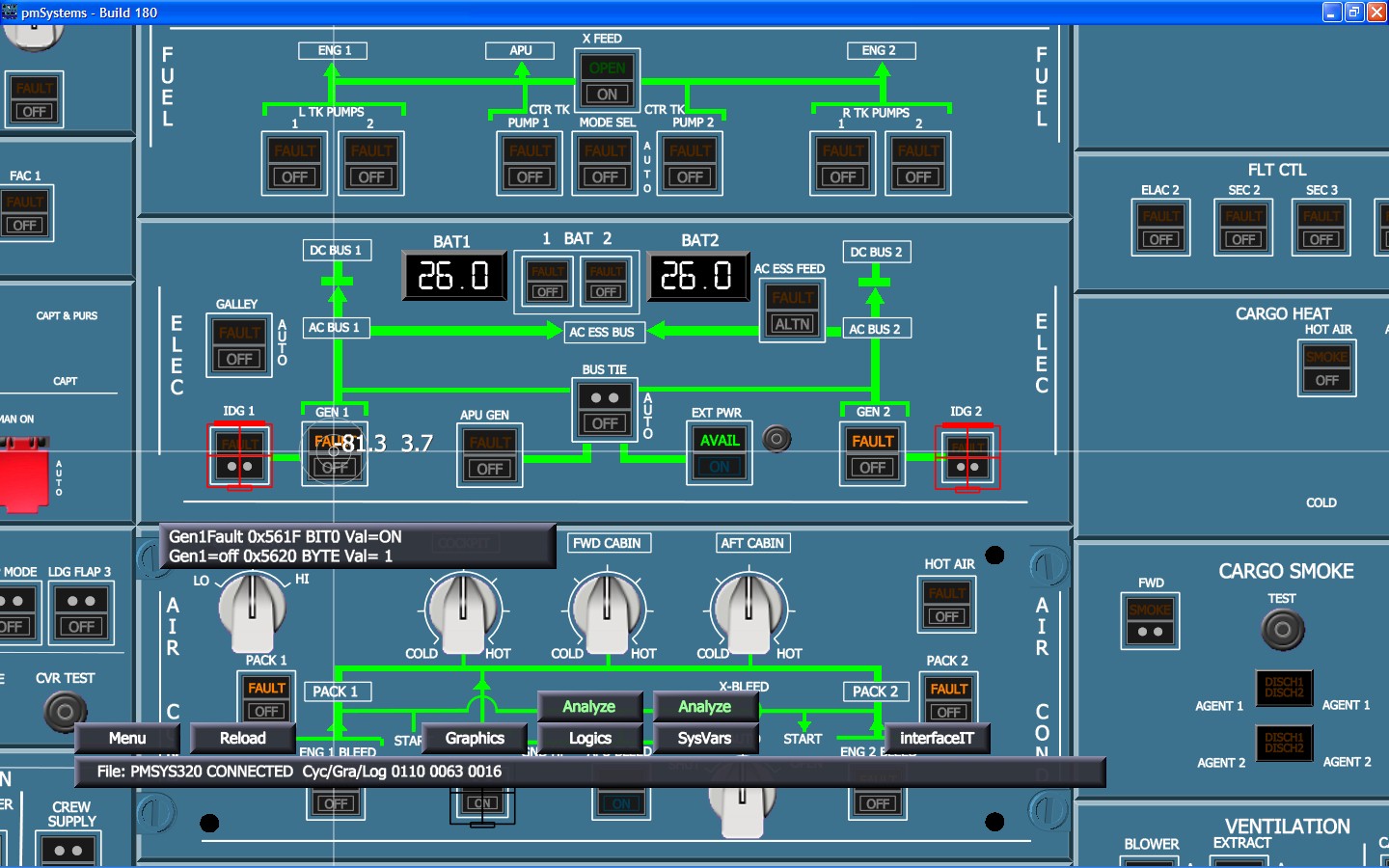
- Обсчет работы самолётных систем — pmSystems
- Реализация работы Flight management and guidance system — MCDU
- Автопилот. Реализован в модуле Flight control unit, FCU

- Электро-дистанционная система управления самолётом, по-нашему, Fly-By-Wire. Она-же обеспечивает интерфейс с органами управления — сайдстиками, педалями, ручками управления двигателями и т.п. Кроме этого, именно в этом модуле заложены «законы», препятствующие слишком большим кренам, опасным тангажам и прочему — Flight Control Laws — pmFBW
- Звуки — куда уж без них. pmSounds
Вроде ничего не забыл.
Система сдержек и противовесов
Проектирование инфраструктуры получалось из совокупности ограничений и опыта Боинга.
Одна из проблем из опыта с Боингом — сервера в стойке страшно пылятся, потом начинают перегреваться. Значит наиболее нагруженные компьютеры — а это X-Plane — должны стоять в серверной.
Тянуть USB из кабины — увольте, значит должны быть бортовые компьютеры.
Если они на борту подвижной платформы, значит они либо с SSD, либо бездисковые. SSD на моей памяти два раза перегрелся, поэтому будем познавать бездисковую загрузку. Весь «бортовой» софт у нас под виндой, значит это будет iSCSI.
Загрузить 6 компьютеров по сети — нужна пропускная способность, значит свичи у нас должны быть с поддержкой транков. Выбор пал на D-Link DGS-1210-16.
X-Plane будет несколько, и сценарии на них должны совпадать, плюс еще и iSCSI, бэкапы и т.д., значит должен быть файлсервер, а точнее — NAS. По соотношению «цена-качество» подошел Synology RS-812+ с апгрейдом памяти до 3Гб. Заодно он поддерживает транки.
Серверная должна быть чистой, то есть дверь в нее должна быть закрыта, значит максимально реализуем удаленный доступ, значит должен быть IP KVM (в реальности он пригодился один раз, в основном пользуемся VNC).

Кроме этого, совсем не улыбается залезать в закабинное пространство где находятся бортовые компьютеры, поэтому нужно по крайней мере уметь их включить и выключить. Значит нужно железобетонно работающее устройство, позволяющее нажать кнопку «Power». Оно было заказано знакомому электронщику, после ряда итераций получилось устройство с Eth, которое может «нажать» кнопку питания.
Выглядит оно так:
Верхняя плата — «мастер», к ней по RS-485 подключаются «ведомые». На каждом «ведомом» — 8 каналов, в каждом из каналов — два дискретных входа (для подключения светодиодов питания и HDD) и один выход — для кнопки Power.
Проекторы у нас стоят дорогие и редкие, выключать их без предварительного охлаждения нельзя, но если пропало входное напряжение, то нужно автоматом, не полагаясь на людей выключить и проекторы и бортовые компьютеры. Значит нам нужны UPSы с сетевым интерфейсом, у проекторов и так он есть, его нужно просто задействовать.
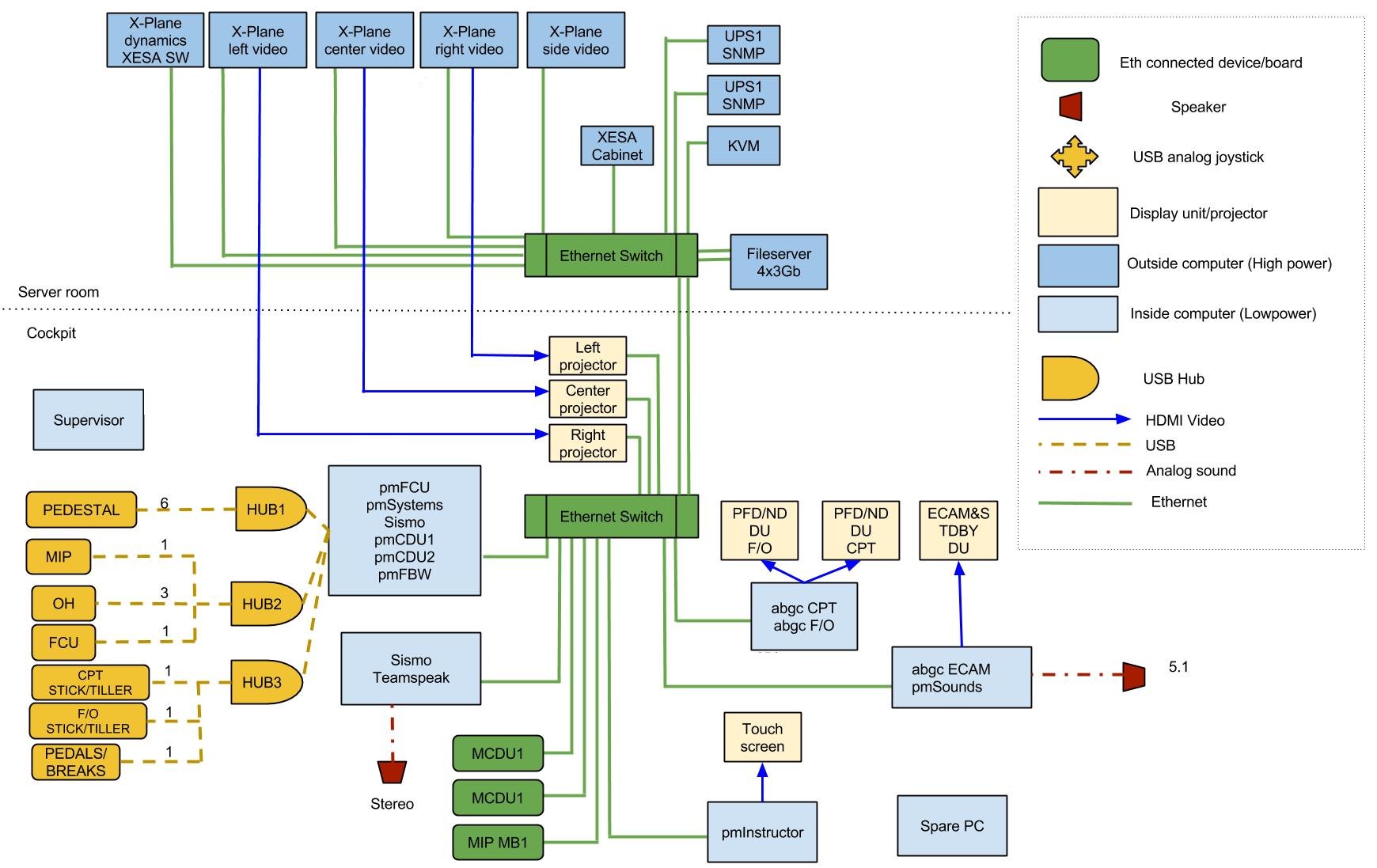
В общем, в результате пары недель проектирования получилась вот такая схема:
Бортовые компьютеры у нас на Celeron G540 2.5ГГц с 4 Гб памяти и видеокартой Low profile на чипе Radeon HD 6450, с гигабайтом памяти.
Графические сервера для X-Plane — Core i5-3470 c 8Гб RAM и двумя 500Гб дисками в зеркале. Для рисования картинки стоят GeForce GTX 670 c 2048Мб. В качестве операционки у нас Ubuntu 12.04 LTS 86_64, теперь и X-Plane стоит 64-битный.
Сервер что обсчитывает динамику — под Win7_32 на Core i7-3770, используется встроенная видеокарта. X-Plane тут 32-битный, и сервер под виндой потому, что плагин для интерфейса с подвижной платформой есть только под 32-бита и под винду.
Кабели и провода
Сверхцелью было построить тренажер так, чтобы в кабину входили только витые пары и силовые кабели. Так и получилось в конечном итоге.
В кабину снаружи идет силовой кабель 220В, две витые пары для соединения свичей (транк), три витые пары для удлинителей HDMI и еще одна витая пара для пульта управления трапом и платформой.
Удлинители я использовал Hama HDMI, со своей задачей они справляются.
Витая пара везде — CAT6 FTP.
Отдельно стоило бы написать как мы решили исхитриться и протянуть наши витые пары в уже имеющейся трубе между шкафом и подвижной платформой. Это была дурацкая затея даже с использованием кабельной смазки, к тому-же потом я все равно протянул еще две трубы.
Электричество
В Боинге мы столкнулись с проблемой неправильной электрической сети, поэтому в этот раз я сел рисовать однолинейную схему (не могу ее найти).
Идея была в том, что мы защищаем автоматами все линии, плюс мы защищаем от поражения током людей.
Расчеты нагрузки показали, что на всю кабину (проекторы, компьютеры, контроллеры ввода-вывода, бортовая вентиляция, свич) достаточно 3000ВА.
На 5 серверов, NAS, свич и KVM тоже нужно примерно столько-же.
На наружние вентиляторы кабины, инструкторскую станцию и привод трапа нужно меньше 1500ВА, поэтому пригодились старенькие 1500 SmartUPS
Итого UPSов стоит четыре — два Ippon Smart Winner 3000 VA с дополнительным блоком батарей, и два 1500VA SmartUPS, оставшиеся от одной из итераций улучшения Боинга.
На одном трёхкиловаттнике висит серверная, на другом — вся кабина. На одном 1500 висит вентиляция кабины и инструкторская станция, ну и еще один — в запасе.
Учитывая наличие автономных источников энергии (UPSы), УЗО для защиты людей стоят после ИБП, т.е. бесперебойники у нас «привязаны» к щиту.

Вентиляция и кондиционирование
Серверная у нас совсем небольшая, около 5 квадратных метров, и туда выделяется 2кВт тепла от стойки и еще, наверное, 1кВт от шкафа управления платформой. Значит будем вешать кондей.
Кондей был выбран Samsung AQ12TSBN, у него производительность по холоду около 3.5кВт. Монтаж я сделал сам, благо инструменты и оборудования было закуплено до этого и использовалось для монтажа кондеев на даче.
Лето показало правильность выбора, температура в серверной колебалась около установленных 19 градусов.
Дурацкой ошибкой было повесить внутренний блок над электрическим щитом, поэтому пришлось уделить особое внимание дренажу. Тьфу-тьфу, эксцессов не было, но к следующему лету я установлю дренажный насос, чтобы уж точно.
В кабине с вентиляцией дело обстоит не так просто.
У нас есть два объема — собственно кокпит, в котором сидят люди, и закабинное пространство, в котором стоят утюги-проекторы и компьютеры.
С самого начала мы решили, что кондиционирования делать не будем — слишком много проблем с конденсатом.

В закабинном пространстве сделаны приток и вытяжка малошумными вентиляторами с производительностью в районе 250 кубов в час. Приток сделан в место установки компьютеров

Вытяжка — около проекторов, в верхней точке (пардон за качество фотки)
На самом деле, не мешало бы еще воткнуть вентилятор в отверстие в «крыше», но температурные замеры не показывают такой необходимости.

Чтобы воздух циркулировал в кабине, снаружи стоит большой 2000-кубовый нагнетательный вентилятор, ну а вытяжка делается двумя последовательно стоящими сайлентами из под ног:
Изначально по расчетам я ошибся с выбором вентиляторов, 2000-кубовый нагнетатель появился позднее, вначале стояли 250-кубовые сайленты.
Даже с 2000 вентилятором в кабине бывает жарко, поэтому мы подумываем, как можно еще улучшить систему.
Костыли, костылики и костылищи
С самого начала было понятно, что даже «полочные» продукты нужно будет оборачивать многочисленными костылями.
- Синхрнизация общих данных X-Plane
- Автоматизация включения-выключения проекторов
- Перезапуск сбойнувших компонентов Project Magenta
X-Plane: синхронизация и запуск
Для синхронизации данных X-Plane в итоге выбран rsync с NASа.
Я пробовал запускать прямо с NFS-шары, но учитывая что у нас и Винда и Линукс, а еще структура каталогов X-Plane, по-моему, в пьяном бреду придумана, я решил что конфигурация у каждого — своя, а сценарии и общие данные синхронизируются по сети каждый раз когда запускается или перезапускается X-Plane.
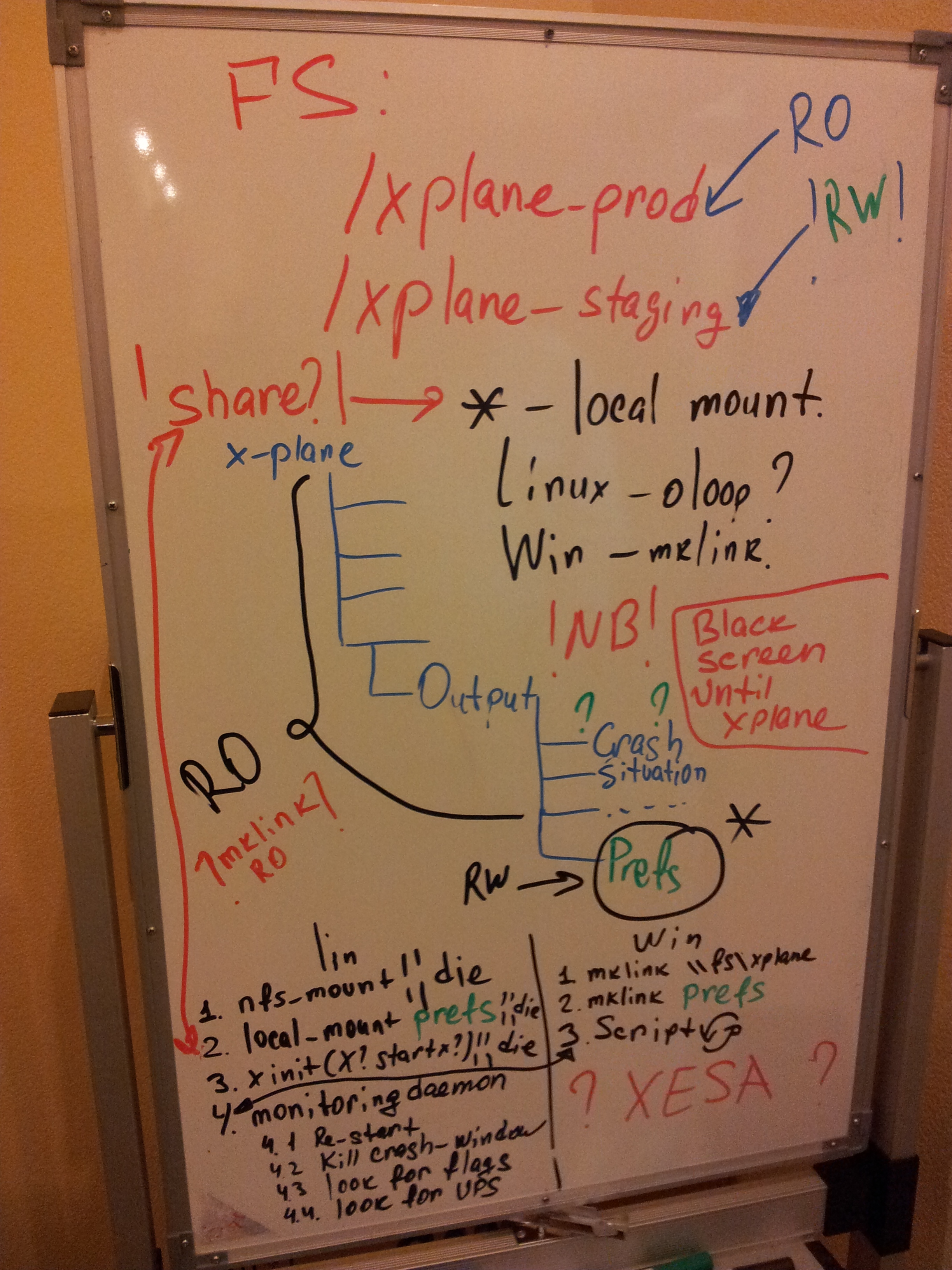
Кстати, по мере проработки идеи с запуском X-Plane прямо с шары, я дошел до того, что редактировал бинарник, чтобы все файлы, открываемые для записи, находились в одной директории. Вот картинка из этого этапа:
Все было успешно закончено, и через два дня вышел апдейт. После этого я решил делать rsync.
Скрипт для запуска получился вот таким:
#!/bin/bash LOGFILE="/var/log/xplane-starter.log" log_msg () < DATE=`/bin/date` /bin/echo "$DATE: $@" >> $LOGFILE > log_msg "Starting xplane-startup.sh" while [ 1 ]; do log_msg "Rsyncing" /root/bin/rsync_64.get >> $LOGFILE /bin/sed -i".bak" '/UNSAFE/d' "/xplane.64/Output/preferences/X-Plane Screen Res.prf" /usr/bin/pactl set-card-profile 'alsa_card.pci-0000_01_00.1' 'output:hdmi-stereo-extra1' /usr/bin/xinit /root/bin/xinitrc.64 >> $LOGFILE 2>&1 & XINIT_PID=$! log_msg "xinit pid = $XINIT_PID" while [ 1 ]; do sleep 1 # Check that the process is still alive if [ -e /proc/$ -a /proc/$/exe ]; then sleep 1 else log_msg "Process dead, restarting" break fi done done Поскольку X-Plane’у совершенно не нужен оконный менеджер, то собственно запуск делается через xinit:
/usr/bin/xsetroot -cursor_name top_left_arrow DISPLAY=:0.0 /usr/bin/X11/xset s 0 DISPLAY=:0.0 /usr/bin/X11/xset s noblank /root/bin/shm_wipe.sh /usr/bin/x11vnc -display :0 -ncache 10 -many & umask 0000 /xplane.64/X-Plane-x86_64 --no_crash_reporter /usr/bin/killall -9 x11vnc shm_wipe.sh — моя лень. Периодически x11vnc перестает запускаться из-за исчерпания shared memory, поэтому в инетах найден рецепт поиска и «отвязывания» неиспользуемых сегментов.
Дополнительно через cron делается перезагрузка X-Plane ранним утром, бо есть в нем утечки памяти. Кроме этого, ночью на всякий случай дается команда на выключение проекторов.
На Винде не все так кошерно, rsync-синхронизацию я делаю периодически руками…
Мониторинг бортового компьютера
Чтобы бороться с подвисающими компонентами ProjectMagenta, на бортовом компьютере написан целый скрипт на PowerShell, да еще и с элементами .NET.
Начался скрипт с детектирования сбойнувший USB-устройств, а дальше оброс уже всем остальным.
До кучи через этот скрипт осуществляется запуск компонентов, и проверка, не выпал ли кто у нас по ходу пьесы.
Отдельной строкой расскажу про EHID.
EHID — это интерфейс между железом кабины (контроллерами ввода-вывода) и программными компонентами. Распространяется под NDA, я его подписал и теперь являюсь счастливым обладателем спецификации. Применил пока для окостыливания бага с тиллером в X-Plane, о котором расскажу ниже.
Суть в том, что есть компонент A320_EHID.exe (и соответственно B737_EHID.exe для Боинга), который держит в себе «дерево» всех всех компонентов кабины — и аналоговых осей, и светодиодов, и тумблеров и всего вообще.
У каждого элемента есть собственное имя и 32-разрядный ID.
Приложения обращаются не напрямую к железу, а к EHID. Общение — поверх TCP, Event-driven. Поллинг весь реализован в EHID, так что такой концепт сильно облегчает жизнь.
Спецификация затрагивает два уровня — между железом и EHID, и между EHID и приложениями.
Нижний уровень представлен в том числе и описанием протокола поверх USB HID, и реализуется в том числе в прошивках контроллеров.
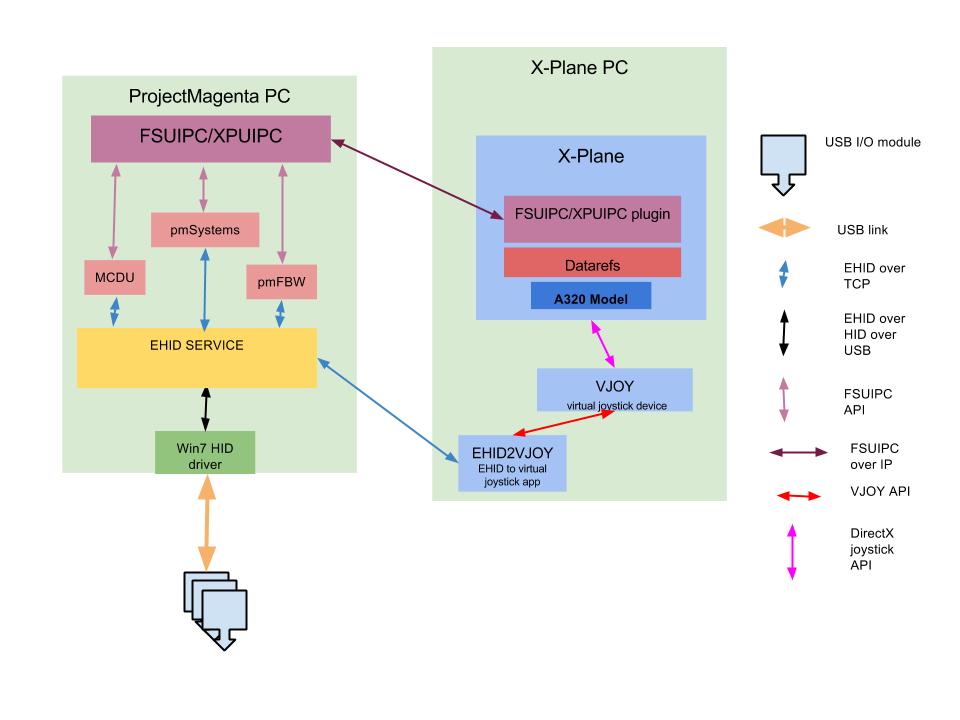
Update: нарисовал картинку по взаимодействию компонентов симулятора между собой
Беда в том, что «последняя ошибка» обнаружилась на стыке драйверов Винды и реализации EHID в прошивках: при одновременном поступлении данных от большого количества устройств, что-то такое волшебное происходит внутри EHID, что приводит к DoS. Обнаруживается, слава богу, легко: EHID перестает отвечать на запросы приложений. На этом и основан мониторинг.
Говнокод — тот еще, не пинайте.
Import-Module c:\scripts\Release\DeviceManagement.psd1 [int] $Port = 21843 $IP = "192.168.X.X" $Address = [system.net.IPAddress]::Parse($IP) $LogDirs = @("C:\EHID","C:\MCDU","C:\RMCDU","C:\FBW","C:\pmSystems","C:\FCU","C:\xpuipc") Write-Host "Starting the supervisor script. " # Check if we just started $p = Get-Process -Name xpwideclient -ErrorAction silentlycontinue if (!($p)) < Write-Host "Just started" # Find and remove logfiles foreach($logdir in $LogDirs) < del $logdir\*.log -ErrorAction SilentlyContinue >del R:\*.tmp -ErrorAction SilentlyContinue # Set the routing for the goddamn windows shitty default gw to iSCSI target route delete 0.0.0.0 route add 0.0.0.0 mask 0.0.0.0 192.168.X.X # Start XPUIPC Start-Process C:\xpuipc\xpwideclient.exe -WorkingDirectory "C:\xpuipc" -WindowStyle Minimized Start-Process C:\EHID\A320_EHID.exe -ArgumentList "-run" -WorkingDirectory "C:\EHID" -WindowStyle Minimized Start-Sleep -Seconds 3 > else < Write-Host "Already working" $startFlag=0 ># Cycle forever while ( 2 -ge 1) < # Clear the flag $failFlag = 0 # Get the list of the failed devices $FailedDevices = Get-WmiObject Win32_USBControllerDevice |%| Where-Object foreach($fDevice in $FailedDevices) < # Set the flag to restart the processes $failFlag = 1 # Disable and then enable device $dDev = Get-Device | Where-Object Write-Warning "Failed device found:" $fDevice.DeviceID Disable-Device -TargetDevice $dDev -Verbose Enable-Device -TargetDevice $dDev -Verbose ># Detect hang of A320_EHID # Create IP Endpoint $End = New-Object System.Net.IPEndPoint $address, $port # Create Socket $Saddrf = [System.Net.Sockets.AddressFamily]::InterNetwork $Stype = [System.Net.Sockets.SocketType]::Stream $Ptype = [System.Net.Sockets.ProtocolType]::TCP # Create byte array [Byte[]] $Message = 0x02,0x03,0x00,0x04 $buffer = new-object System.Byte[] 8192 Try < $Sock = New-Object System.Net.Sockets.Socket $saddrf, $stype, $ptype $Sock.TTL = 26 $Sock.ReceiveBufferSize = 8192; $Sock.ReceiveTimeout = 500; $Sock.Blocking = 1; # Connect to socket $Sock.Connect($end) $Sent = $Sock.Send($Message) Start-Sleep -m 30 $Received = $Sock.Receive($buffer) $Sock.Close() >Catch [Exception] < Write-Host "Error checking EHID" $_.Exception.Message; $failFlag=1; ># Detect restart file-flag $FileExists = (Test-Path "R:\restart.txt" -PathType Leaf) if ($FileExists) < Write-Host "Restart file exists!" del R:\restart.txt $failFlag = 1 ># Restart the processes if ($failFlag -eq 1) < Write-Warning "Restarting processes" Write-Warning "Freezing. " Start-Process C:\scripts\sim_pause.exe -WorkingDirectory "C:\scripts" -WindowStyle Minimized Stop-Process -Name A320_EHID -force -ErrorAction silentlycontinue Stop-Process -Name pmFBW -force -ErrorAction SilentlyContinue Stop-Process -Name pmSystems -force -ErrorAction SilentlyContinue Stop-Process -Name MCDU -force -ErrorAction SilentlyContinue Stop-Process -Name RMCDU -force -ErrorAction SilentlyContinue Stop-Process -Name FCU -force -ErrorAction SilentlyContinue # Set start flag $startFlag=1 >if ($startFlag -eq 1) < Start-Process C:\EHID\A320_EHID.exe -ArgumentList "-run" -WorkingDirectory "C:\EHID" -WindowStyle Minimized Start-Sleep -Seconds 3 ># FIXME Workaround for the falling PM processes $p = Get-Process -Name RMCDU -ErrorAction silentlycontinue if (!($p)) < Write-Host "RMCDU dead, restarting." Start-Process C:\RMCDU\RMCDU.exe -WorkingDirectory "C:\RMCDU" -WindowStyle Minimized >$p = Get-Process -Name FCU -ErrorAction silentlycontinue if (!($p)) < Write-Host "FCU dead, restarting." Start-Process C:\FCU\FCU.exe -WorkingDirectory "C:\FCU" >$p = Get-Process -Name MCDU -ErrorAction silentlycontinue if (!($p)) < Write-Host "MCDU dead, restarting." Start-Process C:\MCDU\MCDU.exe -WorkingDirectory "C:\MCDU" >$p = Get-Process -Name pmFBW -ErrorAction silentlycontinue if (!($p)) < Write-Host "pmFBW dead, restarting." Start-Process C:\FBW\pmFBW.exe -WorkingDirectory "C:\FBW" >$p = Get-Process -Name pmSystems -ErrorAction silentlycontinue if (!($p)) < Write-Host "pmSystems dead, restarting." Start-Process C:\pmSystems\pmsystems.exe -WorkingDirectory "C:\pmSystems" >if ($startFlag -eq 1) < # Clear the flag and start the processes $startFlag = 0 Start-Sleep -Seconds 45 Write-Warning "Un-Freezing. " Start-Process C:\scripts\sim_unpause.exe -WorkingDirectory "C:\scripts" -WindowStyle Minimized >Start-Sleep -Seconds 5 > X-Plane, Tiller и костыль
Тиллер — это рукоятка управления разворотом передней стойки. Нужен для руления на земле.
Рулить можно двумя способами — тиллером и педалями. По достижению определенной скорости, тиллер перестает действовать, остаются только педали.
Проблема в том, что в X-Plane (по признанию его автора) «потеряли» датареф, т.е. внутреннюю переменную, куда можно было бы записать положения тиллера.
Кроме этого, если к X-Plane не подключено джойстика, то он считает, что мы — убогие нищие симмеры, которые летают на клавиатуре, и поэтому нужно делать разворот передней стойки по командам от штурвала-сайдстика.
У меня была весьма бурная переписка на эту тему с автором X-Plane Остином Мейером (в ходе которой он показал себя истеричным козлом, пардон муа), который пообещал исправить этот косяк в одном из релизов. Ждем.
Пока мы ждем, я написал костылик, который с одной стороны цепляется к виртуальному джойстику (VJoy), а с другой — через сеть и EHID забирает значение положения рукоятки тиллера.
В X-Plane я назначил единственную ось — этот самый тиллер, и, в глазах X-Plane, мы перестали быть нищебродами, в связи с чем функционал разворота колёс сайдстиком отключился.
Ничего сложного или необычного в этом костыле нету, поэтому не вижу смысла приводить исходники. Написано за час на .NET по-моему.
Заключение

На этом я пожалуй остановлюсь, и так пост получился очень толстым.
В следующей части будут слайды и история строительства Аирбаса.
Для затравки — фотография из этого этапа:
Спасибо, что дочитали!
- авиасимулятор
- своими руками
- работа над ошибками
Лайфхак на случай, если нужно будет сажать Boeing 737-800/900 самому.

Можно без комментариев. Зайдете под спойлер и все сами увидите)))
Запись обновлена. Добавлена инструкция как посадить тустописятчетыре
Источник
На случай, если нужно будет сажать Ту-154 самому.

1. Перед тем как взять на себя управление самолетом, необходимо успокоить пассажиров: паника во время полета может привести к тому, что люди начнут бегать по салону и дестабилизируют вес самолета.
2. Занять кресло командира экипажа (1), которое располагается в левом углу кабины. Во время полета и посадки придется действовать за четверых: первого и второго пилота, борт-инженера и штурмана. Необходимо собраться с духом: в течение оставшегося полета предстоит сделать то, чему пилотов учат пять лет.
3. Найти с левой стороны штурвала (2) кнопку радио (3) и связаться с землей. Диспетчер вызовет на помощь специалиста, знакомого с данной модификацией самолета, который на протяжении полета будет давать подсказки: у Ту-154 существует огромное количество модификаций, отличающихся друг от друга различным расположением приборов управления. Иногда настолько, что теряются даже сами летчики. При этом большинство приборов дублируют друг друга, поэтому обращать внимание нужно будет только на самые необходимые из них.
4. Отключить автопилот кнопкой быстрого отключения автопилота (4), которая находится на штурвале (2) — при этом раздастся неприятный звуковой сигнал. В отличие от самых современных самолетов, автопилот на Ту-154 не сможет осуществить самостоятельную посадку: по нынешним стандартам это практически парусный флот.
5. Снизить скорость самолета, уменьшив обороты двигателя на среднем пульте пилотов (5) до менее 80% (см. показания прибора на панели контроля (6), для этого необходимо потянуть руды (рычаги) управления двигателем на себя. Полеты тяжелых самолетов выполняются строго на эшелонах — регламентированных высотах, установленных для того, чтобы выдерживать интервалы между летящими самолетами. Каждый эшелон имеет свои заданные значения скорости, которой должен придерживаться экипаж самолета.
6. Начать снижение на заданной скорости с помощью штурвала (2), плавно потянув его от себя, чтобы самолет пошел вниз. Ориентируясь на показания авиагоризонта на командно-пилотажном приборе (7), который показывает пространственное положение самолета относительно линии горизонта, необходимо создать особый угол снижения — не более пяти градусов.
7. Ориентируясь на показания планового навигационного прибора (8), лечь на курс, который сообщит диспетчер с земли. Для того чтобы стрелка прибора соответствовала заданным параметрам, необходимо плавно повернуть штурвал в ту или иную сторону, создав достаточный крен самолета, и удерживать его до тех пор, пока самолет не ляжет на нужный курс. Продолжать снижение, уменьшая работу двигателей.
8. Узнать у диспетчера посадочную высоту (у каждого аэропорта она своя) и параметры давления, которые зависят от аэронавигационной обстановки, и задать их на высотомере (9). Когда самолет окажется на нужной высоте, система сигнализирует об этом пилоту.
9-10. Выпустить закрылки (10). Выпустить шасси (11) в посадочное положение.
11. Вычислить посадочную скорость самолета, пользуясь специальной таблицей. Для этого необходимо узнать посадочную массу самолета, найдя в бумагах второго пилота центровочный график, заполняемый перед полетом, где указан вес пустого самолета, а также зафиксировано число пассажиров и вес груза. К этим данным нужно прибавить информацию об уровне оставшегося топлива. Сопоставив их с данными о текущих погодных условиях (температуру и давление нужно узнать у диспетчера), подсчитать скорость посадки. Таблица, как и руководство по летной эксплуатации самолетом, находится где-то в бумагах пилотов.
12. Ориентируясь на показания командно-пилотажного прибора (7), необходимо с заданной высоты снизиться до точки входа в глиссаду (предпосадочную наклонную прямую) и начать посадку. Удержать самолет строго на линии глиссады очень трудно — это удается даже не каждому начинающему летчику. Директорные стрелки командно-пилотажного прибора должны образовать крест — это значит, что самолет находится на предпосадочной прямой и правильно выдерживает курс.
13. Войдя в точку выравнивания (для Ту-154 это около 10 метров над землей), необходимо перевести двигатели в режим малого газа и плавным взятием штурвала на себя перевести самолет в посадочное положение. Положение самолета должно изменяться соразмерно приближению земли: если земля приближается быстро — штурвал нужно взять на себя быстро, и наоборот, если медленно.
14. После приземления необходимо включить реверс (12) и выпустить интерцепты (13). Когда скорость самолета снизится до 220-230 км/ч, необходимо включить тормоза колес (14), которые находятся в верхней части педалей. На скорости не менее 110-120 км/ч реверс необходимо выключить и продолжать торможение самолета с помощью педалей, в верхней части которых находится ножной тормоз.
15. Выслушать поздравления спасательной команды и аплодисменты пассажиров. Шансы, что неподготовленный человек сможет взять на себя управление и посадить Ту-154, практически нулевые. Ту-154 — один из самых сложных в пилотировании самолетов.
Похожие публикации:
- Как снять подножки на прадо 120
- Как снять подушку безопасности с руля рено меган 1
- Какие литые диски лучше купить на ладу веста р15
- Через сколько менять масло в солярисе
Как включить реверс в x plane 11?

Знаешь ответ на вопрос? Напиши его и получи +2.5 руб. за каждый ответ. Выбирай игру, читай любой вопрос и пиши ответ. Платим каждый месяц на сотовый телефон или yoomoney (Яндекс Деньги). Правила здесь. С нами уже 2300+ игроков!
Для включения реверса в X-Plane 11 выполните следующие шаги: 1. Убедитесь, что вы находитесь на земле и ваш самолет полностью остановлен.
2. Нажмите клавишу «F2» на клавиатуре. Это активирует реверс двигателя.
3. Если нажатие клавиши «F2» не активирует реверс, убедитесь, что у вас правильно назначены клавиши управления в настройках X-Plane 11. Вы можете проверить и изменить эти настройки в меню «Настройки» -> «Управление» -> «Клавиатура и мышь». Обратите внимание, что не все самолеты в X-Plane 11 поддерживают реверс двигателя. Убедитесь, что вы используете самолет, который имеет эту функцию.