Электропривод

Электропри́вод (от электро. и привод ), электромеханическое устройство для приведения в движение механизмов и машин , в котором источником механической энергии является электродвигатель . В электропривод могут входить также передаточный механизм (например, редуктор ), силовой преобразователь (выпрямитель, инвертер, преобразователь напряжения, частоты и др.) и аппаратура управления.
- по назначению – на главный и вспомогательный;
- по характеру движения – на вращательный, линейный и многокоординатный;
- по направлению вращения электродвигателя – на реверсивный и нереверсивный;
- по виду связи с исполнительным органом рабочей машины – на редукторный, фрикционный, электрогидравлический и др.;
- по числу электродвигателей – на индивидуальный и многодвигательный;
- по роду тока – на электроприводы переменного тока и постоянного тока .
Различают электроприводы регулируемые (с изменяемой частотой вращения ) и нерегулируемые (с постоянной частотой вращения). В регулируемых электроприводах используются главным образом электродвигатели постоянного тока, в нерегулируемых – трёхфазные асинхронные или синхронные двигатели.
Редакция технологий и техники. Первая публикация: Большая российская энциклопедия, 2017.
Опубликовано 30 марта 2023 г. в 09:04 (GMT+3). Последнее обновление 30 марта 2023 г. в 09:04 (GMT+3). Связаться с редакцией
Информация
Области знаний: Производственные машины, Электрический ток
- Научно-образовательный портал «Большая российская энциклопедия»
Свидетельство о регистрации СМИ ЭЛ № ФС77-84198,
выдано Федеральной службой по надзору в сфере связи, информационных технологий и массовых коммуникаций (Роскомнадзор) 15 ноября 2022 года.
ISSN: 2949-2076 - Учредитель: Автономная некоммерческая организация «Национальный научно-образовательный центр «Большая российская энциклопедия»
Главный редактор: Кравец С. Л.
Телефон редакции: +7 (495) 917 90 00
Эл. почта редакции: secretar@greatbook.ru
- © АНО БРЭ, 2022 — 2023. Все права защищены.
- Условия использования информации. Вся информация, размещенная на данном портале, предназначена только для использования в личных целях и не подлежит дальнейшему воспроизведению.
Медиаконтент (иллюстрации, фотографии, видео, аудиоматериалы, карты, скан образы) может быть использован только с разрешения правообладателей. - Условия использования информации. Вся информация, размещенная на данном портале, предназначена только для использования в личных целях и не подлежит дальнейшему воспроизведению.
Медиаконтент (иллюстрации, фотографии, видео, аудиоматериалы, карты, скан образы) может быть использован только с разрешения правообладателей.
Принципы работы электрического двигателя для начинающих
Основа работы электрического двигателя, как постоянного тока, так и переменного тока зиждется в силе Ампера. Ежели не впетрить как она получается, то ничего и непонятно будет никогда.
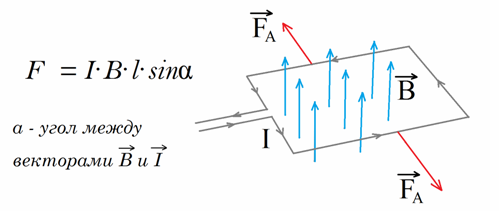
П.С. На самом-то деле там векторное произведение и дифференциалы, но это детали, а у нас упрощённый, частный случай.
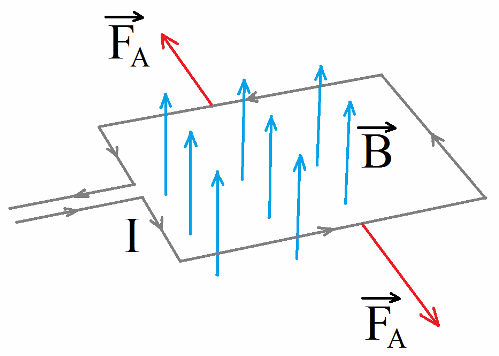
Направление силы ампера определяется правилом левой руки.
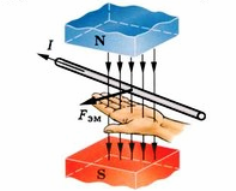
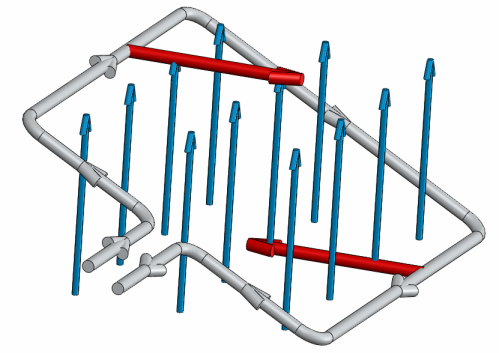
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
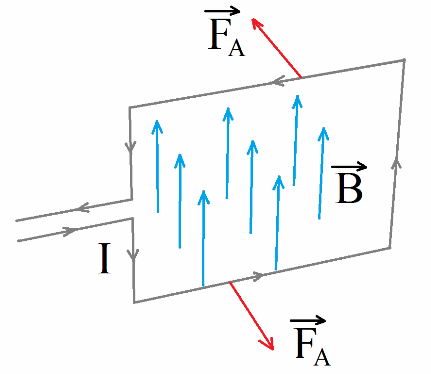
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и электрического тока.
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
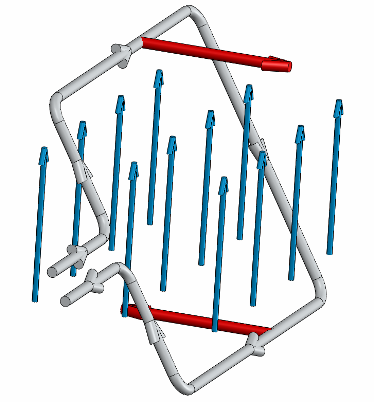
Рис.4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, на сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
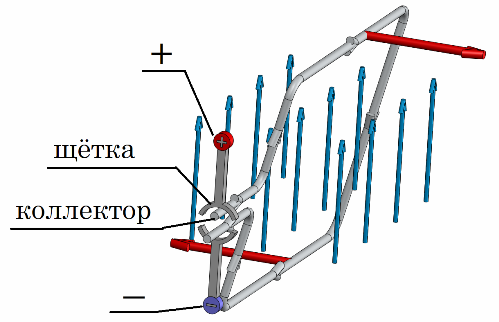
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
ПостСкриптум. Кроме стандартного двигателя постоянного тока (стандартного это значит с щёточно-коллекторным узлом) есть ещё его развитие: бесколлекторный двигатель постоянного тока (БДПТ) и вентильный двигатель.
БДПТ отличается тем, что ток там меняется электронным способом (закрываются и открываются транзисторы), а вентильный ещё круче, он ещё и ток меняет, управляя моментом. И вообще БПДТ с вентильным по сложности сравнимы с электроприводом, ибо имеют всякие датчики положения ротора (датчики Холла например) и сложный электронный контроллер.
Отличие БДПТ от вентильного двигателя в форме противо-ЭДС. У БДПТ там трапеция (грубое изменение), а у вентильного двигателя – синусоида, более плавное значит.
По-английски БДПТ это BLDC, а вентильный двигатель это PMSM.
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
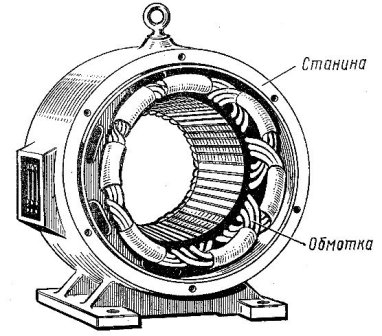
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
А есть значит 3 фазы переменного тока.
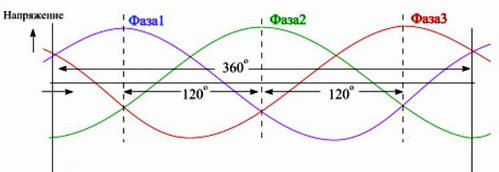
Между ними как видно 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
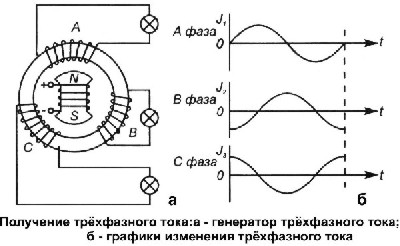
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
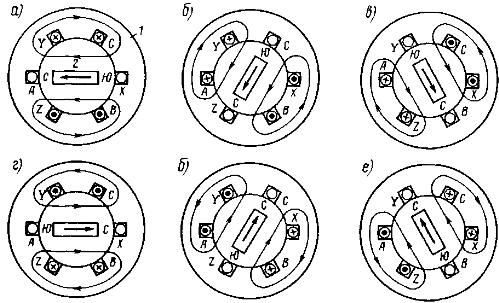
Далее вращающееся магнитное поле «давит» силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Автор статьи: Семён Афанасьев
- Приборы учета электроэнергии — виды и типы, основные характеристики
- Основные виды конструкций трансформаторов
- Как устроен и работает трансформатор, какие характеристики учитываются при эксплуатации
Надеюсь, что эта статья была для вас полезной. Смотрите также другие статьи в категории Электрическая энергия в быту и на производстве » В помощь начинающим электрикам
Подписывайтесь на наш канал в Telegram: Домашняя электрика
Поделитесь этой статьей с друзьями:
Виды электрических двигателей и принципы их работы
Представьте себе, каким бы стал современный мир, если бы из него вдруг исчезли все электродвигатели. Допустим, заменили бы их на тепловые машины. Но ведь тепловые двигатели громоздки, выделяют пар и выхлопные газы, в то время как электрические двигатели сопоставимой мощности компактны, отлично умещаются на станках, электротранспорте, другом оборудовании, будучи при этом экологически безопасными, экономичными и надежными. Невозможно представить современный мир без электродвигателей, сильно облегчающих работу людям, короче говоря, делающих нашу жизнь более комфортной.

Благодаря электродвигателям мы получаем механическую энергию из электрической. А решающее значение в этом процессе имеют массогабаритные характеристики, мощность и количество оборотов в минуту, которые в свою очередь связаны как с конструктивными особенностями двигателей, так и с параметрами питающего напряжения.
По виду питающего напряжения электродвигатели бывают: переменного или постоянного тока. По способу управления: шаговыми, линейными, серво (следящими). Двигатели переменного тока, в свою очередь, бывают асинхронными и синхронными. Давайте же рассмотрим виды электрических двигателей, отметим их особенности, и поговорим о принципах работы каждого из них.
После электричества совершенно бросил интересоваться природой. Неусовершенствованная вещь.
Владимир Владимирович Маяковский
Содержание статьи
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
- Сервоприводы (серводвигатели)
- Линейные электродвигатели
- Асинхронные электродвигатели
- Синхронные электродвигатели
Двигатели постоянного тока
Для построения электроприводов с высокими динамическими характеристиками используют электродвигатели постоянного тока. Они отличаются высокой перегрузочной способностью и равномерностью вращения. Именно двигатели постоянного тока применяются зачастую в электротранспорте. Ими же комплектуются многие станки, машины, агрегаты, включая бытовую технику.

Работа электрических двигателей постоянного тока основана на принципе взаимодействия токов, протекающих по проводникам якоря, с неподвижным магнитным потоком, создаваемым обмоткой возбуждения полюсов.
В основе работы классического двигателя постоянного тока — вращение рамки с током во внешнем магнитном поле: к рамке подводится ток через щеточно-коллектроный узел, а магнитное поле статора получают или от постоянных магнитов, или от того же постоянного тока (магнитное поле катушки с током). В результате рамка с током поворачивается в магнитном поле. Вместо рамки может выступать катушка с током на магнитопроводе — ротор (якорь двигателя постоянного тока).
При помощи резисторов, включаемых в цепь якоря двигателя с независимым возбуждением, можно получать требуемый пусковой ток и пусковой момент, регулировать (уменьшать) скорость якоря при наличии нагрузки на валу. Снижая напряжение на якоре при помощи регулятора, также можно получать требуемый пусковой момент, регулировать скорость вниз от основной, то есть уменьшать ее.
Благодаря перечисленным свойствам такие двигатели постоянного тока с независимым возбуждением находят применение там, где есть необходимость в плавном регулировании скорости в широком диапазоне, например в металлорежущих станках.
Двигатели переменного тока

Электродвигатели переменного тока очень широко используются в быту и в промышленности, поскольку считаются более универсальными, по сравнению с двигателями постоянного тока. Двигатели переменного тока имеют простую конструкцию, более надежны, чем двигатели постоянного тока, и неприхотливы в обращении.
Например большинство домашних вентиляторов и промышленных вытяжек оборудованы именно асинхронными двигателями переменного тока. Ими же оснащены лебедки, насосы, станковое оборудование. Простота двигателей переменного тока промышленной частоты заключается в отсутствии щеточно-коллекторного узла и сложной электроники.
Когда речь идет о безопасности и надежности работы трехфазных асинхронных двигателей переменного тока, особенно в условиях промышленных предприятий, важно знать, как предотвратить повреждение обмоток при обрыве одной из фаз. Это становится возможным благодаря мероприятиям, о которых подробно рассказано в статье Повышение надежности работы трехфазных двигателей.
Шаговые двигатели

Шаговые электродвигатели функционируют, преобразуя дискретные электрические импульсы постоянного тока в механические перемещения (шаги). Офисная техника, станки, роботы, — везде, где требуется высокая скорость и равномерность перемещения рабочего органа, применяются сегодня шаговые электродвигатели. Для контроля скорости вращения ротора, электронным блоком регулируется частота следования импульсов и их скважность. Шаговый двигатель — это синхронный бесщеточный двигатель постоянного тока.
Примеры ипсользования шаговых двигателей:
Сервоприводы (серводвигатели)

Сервопривод (следящий привод) — это высокотехнологичный двигатель постоянного тока. В отличие от шагового двигателя, у серводвигателя в конструкции присутствует еще и датчик положения ротора, при помощи которого реализуется механизм отрицательной обратной связи.
Двигатели данного типа способны развивать высокие обороты и мощность, как и шаговые двигатели постоянного тока, но регулировка положения рабочего органа оказывается более точной. Для станков с ЧПУ, сервопривод — как раз то, что нужно. Многие современные промышленные станки оборудованы именно сервоприводами, интегрированными в систему высокоточного компьютерного управления.
Линейные электродвигатели
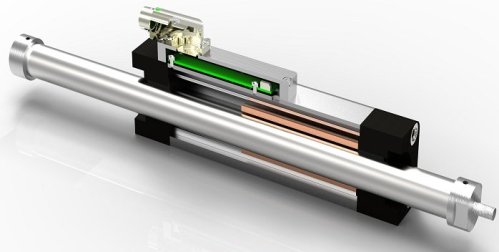
У линейного двигателя постоянного тока вместо ротора — стержень (шток) с магнитами, прямолинейно перемещаемый через статор относительно катушки индуктивности. Двигатели данного типа набирают популярность в качестве приводов механизмов с возвратно-поступательными движениями в процессе работы.
Это надежное и экономичное решение, исключающее необходимость использовать какую бы то ни было механическую передачи. Импульсы необходимой полярности и длительности посылаются в катушку, формируя магнитное поле нужной конфигурации, которое со своей стороны действует на шток, причем текущее положение штока отслеживается благодаря датчикам Холла, встроенным в статор.
Асинхронные электродвигатели
Чаще всего асинхронным двигателем называют двигатель переменного тока, у которого частота (или угловая скорость) вращения ротора отличается от угловой скорости магнитного потока статора. То есть в таком двигателе присутствует «скольжение». Асинхронные двигатели переменного тока бывают с короткозамкнутым (типа «беличья клетка») ротором или с фазным ротором.
Более мощные асинхронные двигатели изготавливают с фазным ротором, величина магнитного потока у такого ротора регулируется реостатом, и скорость вращения получается регулируемой. Менее критичное (к зависимости частоты вращения ротора от нагрузки) оборудование оснащают асинхронными двигателями с короткозамкнутым ротором.
Трехфазные асинхронные электродвигатели переменного тока благодаря простоте в обслуживании, надежности и низкой стоимости наиболее распространены в промышленности.
Однофазные асинхронные электродвигатели имеют короткозамкнутый ротор и две обмотки в статоре, смещенные одна относительно другой на 90°. Одна обмотка рабочая. При работе электродвигателя эта обмотка постоянно получает питание от сети однофазного переменного тока.
Вторая обмотка пусковая и подключается на период пуска для создания пускового момента. Она выполнена проводом меньшей площади сечения, и ее активное сопротивление больше, чем у рабочей обмотки.
Когда ротор двигателя развивает достаточную частоту вращения, пусковая обмотка отключается. Это происходит автоматически под действием токового реле или специального пускателя.
Лучшие пусковые свойства имеет электродвигатель, в цепь пусковой обмотки которого включен конденсатор. В этом случае ток в пусковой обмотке сдвигается по фазе на угол, близкий к 90°, чем обеспечивается достаточный пусковой момент.
В рабочей части механические характеристики однофазного асинхронного электродвигателя идентичны характеристикам трехфазного асинхронного электродвигателя. КПД однофазных электродвигателей меньше, чем трехфазных, поэтому однофазные двигатели изготовляют с номинальной мощностью не более 0,6 кВт.
На такую же мощность изготовливают коллекторные двигатели однофазного тока, которые могут работать как от сети переменного тока, так и от источника постоянного напряжения, поэтому их называют универсальными коллекторные двигатели.
По существу, это двигатели с последовательным возбуждением, отличающиеся тем, что магнитопровод их делается шихтованным и они приспособлены к работе с пульсирующим магнитным потоком. В случае питания от источника переменного напряжения В 50 Гц ток и магнитный поток одновременно меняют направление, и поэтому момент получается пульсирующим с частотой 100 Гц.
Эти электродвигатели обладают характеристиками двигателей с последовательным возбуждением. Их применяют как и асинхронные однофазные электродвигатели в электроинструментах, бытовых механизмах и других машинах небольшой мощности.
Подборка статей про асинхронные двигатели:
Синхронные электродвигатели

Говоря «синхронный двигатель», традиционно имеют ввиду двигатель переменного тока, у которого частота вращения (или угловая скорость) ротора равна угловой скорости движения магнитного потока в полости статора. Чаще всего речь о двигателях, роторы которых несут на себе постоянные магниты или обмотку возбуждения, создающую сильное собственное магнитное поле, препятствующее скольжению.
Синхронные трехфазные электродвигатели отличаются от асинхронных тем, что ротор их представляет собой электромагнит, через обмотки которого пропускается постоянный ток. Такой электродвигатель обладает свойством поддерживать строго постоянную частоту вращения, равную частоте вращения магнитного поля, создаваемого трехфазной обмоткой статора.
Кроме того, синхронный электродвигатель имеет высокий коэффициент мощности. Регулируя ток возбуждения, можно поддерживать коэффициент мощности равным единице. В синхронном электродвигателе отсутствуют потери, связанные со скольжением, поэтому КПД их также больше, чем в асинхронных.
У синхронных двигателей скорость вращения ротора поэтому постоянна. Мощные вентиляторы, приводы подъемных кранов, насосов, — во многих применениях, где необходимы высокая мощность и постоянная скорость, независимо от нагрузки, используются синхронные двигатели.
Всегда полезно знать, какие причины могут привести к неисправностям в электродвигателях. Наши результаты исследования о Наиболее распространенных неисправностях крановых электродвигателей раскроют это.
Когда речь идет о ремонте электродвигателей, важно знать, как обеспечить надежное восстановление оборудования. Наши специалисты рассказывают о лучших методах ремонта асинхронных двигателей в нашей статье. Перейдите по ссылке, чтобы узнать, какие шаги следует предпринять для эффективного ремонта: Ремонт асинхронных двигателей: секреты профессионалов
- Про гелевые аккумуляторы и их правильное использование
- Виды электрических генераторов и принципы их работы
- Системы обогрева грунта — как устроены и работают
Надеюсь, что эта статья была для вас полезной. Смотрите также другие статьи в категории Электрические приборы и устройства, Электродвигатели и их применение
Подписывайтесь на наш канал в Telegram: Домашняя электрика
Поделитесь этой статьей с друзьями:
18. Двигатели переменного и постоянного электрического тока. Лещинский.
Электрические двигатели бывают постоянного и переменного тока (рис. 2). Наиболее распространены электрические двигатели переменного тока. Они просты по устройству, неприхотливы в эксплуатации. Основной недостаток — практически не регулируемая частота вращения.
Электрические двигатели переменного тока изготавливают одно- и многофазными. Основные элементы таких двигателей — статор (неподвижная часть) и ротор (вращающаяся часть). Выпускаются электродвигатели с коротко замкнутыми обмотками ротора (типа беличьей клетки) и обмотками, выведенными на коллектор (систему контактных колец) и замыкающимися через регулируемые резисторы. Такие роторы называют фазными, а электродвигатели — электродвигателями с фазным ротором.
Электрические двигатели переменного тока применяют для привода рабочих машин различного назначения (насосы, деревообрабатывающие станки, дробилки и т. д.), не требующих регулирования частоты вращения.
Электродвигатели постоянного тока состоят из подвижной части (якоря) и неподвижной части (статора). Они выпускаются с параллельным, последовательным и смешанным соединением обмоток якоря и статора. Достоинством двигателей постоянного тока является способность регулировать частоту вращения, но они требуют значительных усилий при эксплуатации.
Следует особо отметить, что машины постоянного тока является обратимой машиной, т.е. она может работать как генератор электрической энергии, если к ее валу подводится механический вращающий момент. И как двигатель, если к ее обмоткам подводится электрическая энергия.
Принцип действия двигателя постоянного тока.
Электрическая энергия подводится к обмоткам якоря и возбуждения двигателя постоянного тока, которые имеют такое же устройство,
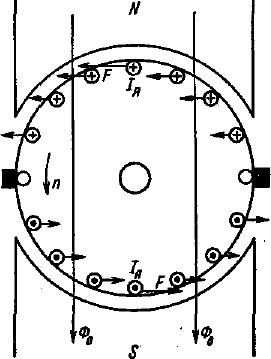
Рис. 11.25. Принцип действия двигателя постоянного тока
как и обмотки генератора. Благодаря коллектору подводимый постоянный ток меняет направление в проводниках обмотки якоря, когда при вращении якоря они переходят в другую параллельную ветвь, т. е. попадают в пространство под другим полюсом. Таким образом, направление тока в проводниках обметки якоря, находящихся под данным полюсом, остается все время неизменным (рис. 11.25).
Как известно, на проводник с током, находящийся в магнитном поле, действует электромагнитная сила F, направление которой определяется правилом левой руки. При указанном на рисунке направлении тока в обмотке якоря и полярности полюсов якорь машины вращается под действием силы F против часовой стрелки. Таким образом, машина постоянного тока развивает вращающий момент и к ее валу может быть приложен тормозной момент — механическая нагрузка.
Универсальные коллекторные двигатели применяются в промышленных и бытовых электроустановках (электрифицированный инструмент, вентиляторы, холодильники, соковыжималки, мясорубки, пылесосы и др.). Они рассчитаны для работы как от сети постоянного тока (110 и 220 В), так и от сети переменного тока частотой 50 Гц (127 и 220 В). Эти двигатели имеют большой пусковой момент и сравнительно малые размеры.
По своему устройству универсальные коллекторные двигатели принципиально не отличаются от двухполюсных двигателей постоянного тока с последовательным возбуждением.
В универсальных коллекторных двигателях не только якорь набирается из листовой электротехнической стали, но и неподвижная часть магнитопровода (полюса и ярмо).
Обмотка возбуждения этих двигателей включается с обеих сторон якоря. Такое включение (симметрирование) обмотки позволяет уменьшить радиопомехи, создаваемые двигателем.
Для получения примерно одинаковых частот вращения при номинальной нагрузке как на постоянном, так и на переменном токе обмотку возбуждения выполняют с ответвлениями: при работе двигателя от сети постоянного тока обмотку возбуждения используют полностью, а при работе от сети переменного тока — лишь частично.
Вращающий момент создается за счет взаимодействия тока в обмотке якоря (ротора) с магнитным потоком возбуждения.
Эти двигатели выпускаются на сравнительно небольшие мощности — от 5 до 600 Вт (для электроинструмента — до 800 Вт) и частоты вращения — 2770 — 8000 об/мин. Пусковые токи таких двигателей невелики, поэтому их в сеть включают непосредственно без пусковых сопротивлений. Универсальные коллекторные двигатели имеют минимум четыре вывода: два для подключения к сети переменного тока и два для подключения к сети постоянного тока. КПД универсального двигателя на переменном токе ниже, чем на постоянном. Это вызвано повышенными магнитными и электрическими потерями. Величина тока, потребляемого универсальным двигателем при работе на переменном токе, больше, чем при работе этого же двигателя на постоянном токе, так как переменный ток помимо активной составляющей имеет еще и реактивную составляющую.
Частоту вращения таких двигателей регулируют, изменяя подводимое от сети напряжение, например, автотрансформатором, а у двигателей небольшой мощности — реостатом.
Однофазный коллекторный двигатель нельзя пускать в ход при малой нагрузке, потому что он может пойти «вразнос».
Отечественная промышленность выпускает универсальные коллекторные двигатели серий УЛ, МУН, УМТ, ДТА-4, УВ, М-1Д, ЭП, УД, Д2-03, ЭПП-1 и др.
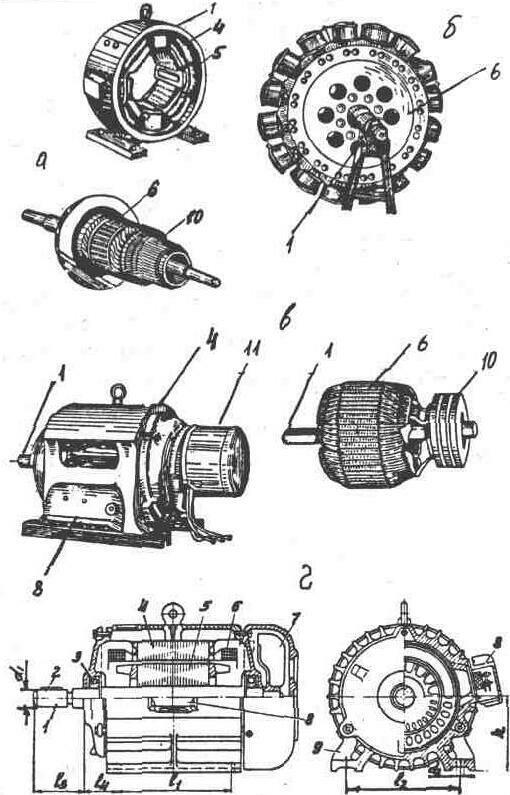
Рис. 2. Электрические двигатели: а — постоянного тока; б — синхронные; в — асинхронные с фазным ротором; г — асинхронные трехфазные с коротко замкнутым ротором серии 4А. 1 — вал, 2 — шпонка, 3 —подшипник, 4 — статор, 5 — обмотка статора, 6 — ротор (якорь); 7 — вентилятор; 8 — коробка выводов; 9 — лапа, 10 — коллектор; 11 — щетки; l1, l2 — продольное и поперечное расстояния в лапах; l3 — длина выступающего конца вала; l4. — размер выступающей крышки; h — высота оси вращения; d1, d2 — диаметры вала и отверстий в лапах.