DIY: делаем боевого робота в домашних условиях. Часть 2 «Epic Fail»
Это продолжение краткой истории о разработке боевого робота без интеллекта, краткое руководство по сжиганию контроллеров и Arduino 2560. О нашем участии в шоу «Бронебот: осенний разогрев». А так же мой опыт соединения Arduino и двух RC-приемников с шаговыми и коллекторными двигателями.
Под брендом GeekTimes

На съемной панели была наклейка Habrahabr. Лишившись этой панели для уменьшения веса, я брендировал робот в ручную. GT вперед!
Аккуратное подключение всех элементов системы

1-Arduino 2560
2-RC-приемник
3,4-Драйвера коллекторных двигателей
5-Блок реле
6-Батарея
Логика работы системы
Управление роботом(ровером) осуществляется средством радиоуправления двумя приемо-передающими устройствами. Первый пульт основного оператора используется для управления движением робота и орудиями, второй оператор дублирует управление орудиями. На ровере оба приемника соединены к Arduino, в которой программно считаем ШИМ от приемника, включаются/выключаются реле для управления клапанами пневмосистемы и выдается ШИМ для драйверов двигателей.
Скетч Arduino
#include #define STEP_PIN1 12 #define STEP_PIN2 10 #define RELEPIN0 2 #define RELEPIN1 3 #define RELEPIN2 4 #define RELEPIN3 5 #define RELEPIN4 6 #define RELEPIN5 7 #define RELEPIN6 8 #define RELEPIN7 9 #define a0 = A0; #define a1 = A1; #define a2 = A2; #define a3 = A3; #define a4 = A4; #define a5 = A5; //Второй пульт //Временного отключили второй пульт //#define a6 = A8; //#define a7 = A9; int ch0,ch1,ch2,ch3,ch4,ch5,ch6,ch7; //Задаем максимум и минимум для ШИМа с первого приемника const int min0=1094; const int min1=1094; const int max0=813; const int max1=813; int speed1,speed2,speedmot1,speedmot2,sd1,sd2; byte ch2st,ch3st,ch4st,ch5st,ch6st,ch7st; byte tormozcount1=0; byte tormozcount2=0; byte wasdir1=2; byte wasdir2=2; byte skolkotormozit = 7; int skolkotormozim=0; void setup() < Serial.begin(9600); Serial.println("start"); pinMode(a0, INPUT); pinMode(a1, INPUT); pinMode(a2, INPUT); pinMode(a3, INPUT); pinMode(a4, INPUT); pinMode(a5, INPUT); //Временного отключили второй пульт //pinMode(a6, INPUT); //pinMode(a7, INPUT); pinMode(STEP_PIN1, OUTPUT); pinMode(STEP_PIN2, OUTPUT); pinMode(RELEPIN0, OUTPUT); pinMode(RELEPIN1, OUTPUT); pinMode(RELEPIN2, OUTPUT); pinMode(RELEPIN3, OUTPUT); pinMode(RELEPIN4, OUTPUT); pinMode(RELEPIN5, OUTPUT); pinMode(RELEPIN6, OUTPUT); pinMode(RELEPIN7, OUTPUT); >void loop() < ch0 =pulseIn(a0, HIGH,30000); if(ch0<900)< //Если нет сигнала с пульта Serial.println("first no signal"); digitalWrite(STEP_PIN1,LOW); digitalWrite(STEP_PIN2,LOW); digitalWrite(RELEPIN0,LOW); digitalWrite(RELEPIN1,LOW); digitalWrite(RELEPIN2,LOW); digitalWrite(RELEPIN3,LOW); digitalWrite(RELEPIN4,LOW); digitalWrite(RELEPIN5,LOW); digitalWrite(RELEPIN6,LOW); digitalWrite(RELEPIN7,LOW); >//Снимаем показания с ШИМа от первого приемника ch1 =pulseIn(a1, HIGH); ch2 =pulseIn(a2, HIGH); ch3 =pulseIn(a3, HIGH); ch4 =pulseIn(a4, HIGH); ch5 =pulseIn(a5, HIGH); //Временного отключили второй пульт ch6 =1250; //pulseIn(a6, HIGH,2020); ch7 =1250; //pulseIn(a7, HIGH,2020); if(ch2>1500)< ch2st=1; >else < ch2st=0; >if(ch3>1500)< ch3st=0; >else if(ch3>0) < ch3st=1; >if(ch4>1500)< ch4st=1; >else < ch4st=0; >if(ch5>1500)< ch5st=1; >else < ch5st=0; >//Каждый канал второго пульта управляет двумя орудиями if(ch6>1800)< ch6st=2; >else if(ch6<1200)< ch6st=1; >else < ch6st=0; >if(ch7>1800)< ch7st=2; >else if(ch7<1200)< ch7st=1; >else < ch7st=0; >//Первое орудие---------------------------------------------- if(ch2st==1 or ch6st==1)< digitalWrite(RELEPIN0,HIGH); >else < digitalWrite(RELEPIN0,LOW); >//Второе орудие---------------------------------------------- if(ch3st==1 or ch6st==2)< digitalWrite(RELEPIN1,HIGH); >else < digitalWrite(RELEPIN1,LOW); >//Третье орудие---------------------------------------------- if(ch4st==1 or ch7st==1)< digitalWrite(RELEPIN2,HIGH); >else < digitalWrite(RELEPIN2,LOW); >//Если есть сигнал с первого пульта if(ch0>0)< ch0=(ch045)?50:ch0; ch1=(ch145)?50:ch1; ch0 =ch0-min0; ch1 =ch1-min1; //Получаем данные о положении стиков управления от 0 до 100 ch0 =map(ch0,0,max0,0,100); ch1 =100-map(ch1,0,max1,0,100); //Превращаем данные о напралении движения в необходимые значения для каждого двигателя speed1=round((ch0-50)*(abs(ch1-50)+50)/50); speed2=round((ch1-50)*(abs(ch0-50)+50)/50); //корректируем значения и считаем скорость моторов speedmot1=speed1+speed2; speedmot2=speed1-speed2; // Выставляем ограничения speedmot1=(speedmot1>100)?100:speedmot1; speedmot2=(speedmot2>100)?100:speedmot2; speedmot1=(speedmot1<-100)?-100:speedmot1; speedmot2=(speedmot2<-100)?-100:speedmot2; speedmot1=(speedmot1<20 && speedmot1>-20)?0:speedmot1; speedmot2=(speedmot2-20)?0:speedmot2; sd1=map(abs(speedmot1),0,100,0,255); sd2=map(abs(speedmot2),0,100,0,255); //Вывод значений для диагностики Serial.print(ch0); Serial.print(";"); Serial.print(ch1); Serial.print(";"); Serial.print(";"); Serial.print(speed1); Serial.print(";"); Serial.print(speed2); Serial.print(";"); Serial.print(speedmot1); Serial.print(";"); Serial.print(speedmot2); Serial.print(";"); Serial.print(sd1); Serial.print(";"); Serial.print(sd2); Serial.print(";wasdir"); Serial.print(wasdir1); Serial.print(";"); Serial.print(wasdir2); Serial.println(";"); //Выдаем ШИМ для драйвера, если мы не в состоянии торможения if(tormozcount1==0 and tormozcount2==0)< if(sd1<220)< analogWrite(STEP_PIN1,sd1); >else < digitalWrite(STEP_PIN1,HIGH); >if(sd2<220)< analogWrite(STEP_PIN2,sd2); >else < digitalWrite(STEP_PIN2,HIGH); >>else < digitalWrite(STEP_PIN1,LOW); digitalWrite(STEP_PIN2,LOW); >//торможение, выбег ротора if(speedmot1-40)< Serial.println("Tormoz menshe 40 1 dvig;"); digitalWrite(RELEPIN3,HIGH); digitalWrite(STEP_PIN1,LOW); tormozcount1=0; >else < digitalWrite(RELEPIN3,LOW); >if(speedmot2-40 )< Serial.println("Tormoz menshe 40 2 dvig;"); digitalWrite(RELEPIN4,HIGH); digitalWrite(STEP_PIN2,LOW); tormozcount2=0; >else < digitalWrite(RELEPIN4,LOW); >//Если мы тормозим больше циклов, чем нужно для тормоза считаем, что мы неподвижны if(speedmot1-40 and speedmot2-40)< skolkotormozim++; >else < skolkotormozim=0; >if( skolkotormozim>skolkotormozit) < wasdir1=2; wasdir2=2; digitalWrite( RELEPIN5, LOW); digitalWrite( RELEPIN6, LOW); Serial.println("Stop for 10 cicles"); >//смена направления хода if((speedmot1 < -10 and wasdir1==1) || (speedmot1 >=5 and wasdir1==0)) < //Если новое направление не соответствует старому if(tormozcount1<=0)< //если счетчик 0 тормозим Serial.println("Tormoz vibeg rotora 1 dvig;"); digitalWrite(STEP_PIN1,LOW); digitalWrite(RELEPIN3,HIGH); tormozcount1=skolkotormozit; >if(tormozcount1>0) < //Если уже тормозим digitalWrite(STEP_PIN1,LOW); tormozcount1--; >if(tormozcount1==1)< //если оттормозили tormozcount1--; digitalWrite(RELEPIN3,LOW); Serial.println("Change 1dvig "); if(speedmot1 < 0)< wasdir1=0; digitalWrite( RELEPIN5, HIGH); Serial.println("vzad"); >else < wasdir1=1; digitalWrite( RELEPIN5, LOW); Serial.println("vpered"); >> > if((speedmot2 < -10 and wasdir2==1) || (speedmot2 >=5 and wasdir2==0)) < //Если новое направление не соответствует старому if(tormozcount2<=0)< //если счетчик 0 тормозим Serial.println("Tormoz vibeg rotora 2 dvig;"); digitalWrite(STEP_PIN2,LOW); digitalWrite(RELEPIN4,HIGH); tormozcount2=skolkotormozit; >if(tormozcount2>0) < //Если уже тормозим digitalWrite(STEP_PIN2,LOW); tormozcount2--; >if(tormozcount2==1)< //если оттормозили tormozcount2--; digitalWrite(RELEPIN4,LOW); Serial.print("Change 2dvig "); if(speedmot2 < 0)< wasdir2=0; digitalWrite( RELEPIN6, HIGH); Serial.println("vzad"); >else < wasdir2=1; digitalWrite( RELEPIN6, LOW); Serial.println("vpered"); >> > // Если долго никуда не ехали меняем направление сразу if(speedmot1 < -40 and wasdir1==2)< wasdir1=0; digitalWrite( RELEPIN5, HIGH); Serial.println("Reverse 1 motor"); >if(speedmot1 > 40 and wasdir1==2) < wasdir1=1; digitalWrite( RELEPIN5, LOW); Serial.println("Forward 1 motor"); >if(speedmot2 < -40 and wasdir2==2)< wasdir2=0; digitalWrite( RELEPIN6, HIGH); Serial.println("Reverse 2 motor"); >if(speedmot2 > 40 and wasdir2==2) < wasdir2=1; digitalWrite( RELEPIN6, LOW); Serial.println("Forward 2 motor"); >/* //Диагностика Serial.print(tormozcount1); Serial.print(";"); Serial.print(tormozcount2); Serial.print(";"); Serial.print(wasdir1); Serial.print(";"); Serial.print(wasdir2); Serial.print(";"); */ //delay(1000); >else < //Если нет сигнала с пульта >> В первой версии робота мы использовали шаговые двигатели NEMA 43, для них скетч было написать несколько сложнее, т.к. приходилось либо подсчет ШИМа с приемников выводить в функцию по таймеру, либо управление ШД. Для этих целей я использовал библиотеку TimerOne.
Скетч Arduino RC управление шаговыми двигателями
Прикрепляем библиотеку
#include
В функции setup инициируем таймер и прикрепляем к нему функцию отправки на контроллер ШД пульса на совершение одного шага.
Timer1.initialize(500000); // initialize timer1, and set a 1/2 second period Timer1.pwm(9, 512,300); // setup pwm on pin 9, 50% duty cycle Timer1.attachInterrupt(callback);
Функция отправки импульса
void callback()
В ходе основного цикла программы меняем частоту таймера в зависимости от необходимой скорости.
Timer1.pwm(9, 512,speedmot1); В случае остановки двигателя отключаем функцию от таймера
Timer1.detachInterrupt();
Конструкция и сжигание Arduino
Конструкцию продумывали и испытывали с целью создать жесткую конструкцию. 
Мне кажется на кадре ниже зафиксирован момент, когда при использовании сварки кабель от Arduino 2560 попал на корпус. В результате этого у нас сгорел UART и мы не могли более производить перепрошивку через USB. Самым быстрым решением было перейти на Arduino Uno, которая оказалась под рукой. Отказались от пульта второго оператора, портов хватило в самый раз. 

Тест пневмосистемы
Из всех планируемых орудий пришлось оставить только лифт, так как посчитали его самым эффективным. Пневмосистему тестировали от компрессора 6 атм. В боевом состоянии мы уже использовали баллон с CO2 и давлением после редуктора в 10 атм, так же заменили трубку на больший диаметр.
Тест орудия
Учимся ездить на роботе
На одном из таких тестов мы сожгли полевики на контроллерах. На другом залипли реле, переключающие реверс. Затем в код ардуино я ввел выбег ротора, некое время ожидания перед сменой направления движения двигателя. Робот стал хуже в управлении, но контролеры целые.
Уличные тесты робота
Epic Fail
Стоит сразу отметить, что у нас не было весов. Мы просто поднимали робота все вместе, никто не хотел говорить, что ему тяжело и мы все дружно кивали и соглашались, что робот легкий. 
Организаторы, особенно хранители арены очень серьезно относятся к вопросу безопасности, многие роботы просто не прошли квалификацию перед боем. При взвешивании оказалось, что наш робот весит 161.5 кг., при максимально разрешнных 105. Питер Редмонд на отрез отказался выпускать нас на сцену. Мы вынуждены были снять всю пневмосистему, орудия, снять юбку, которая защищала нас от подбрасывания, снять защитную стенку и заменить ее на оргстекло из которого сделаны стенки арены. Из 6 аккумуляторов от 3 пришлось отказаться. 
Мы прошли квалификацию, но на арене уже могли только таранить. Нас прозвали вытяжкой, а нашего противника холодильником. Наверное, когда говорят «Первый блин комом» имеют ввиду именно такой сценарий развития событий, но мы получили удовольствие.
Видео с Бронебота
Приятного просмотра видео с боя.

P.S.: Немного расстроила организация выступления, т.к. не было никакого внимания на команду, собиравшую робота и на операторов, которые управляли им. Мы готовили костюмы, хотели быть масонами с масонской пирамидой, а получилась просто вытяжка, которая ездила по сцене…
P.P.S.: Мы уже думали полностью менять корпус и концепцию робота к следующим соревнованиям, но «За одного битого двух небитых дают». С нашими шрамами от «Открывашки» корпус ценен как история. На корпусе подписи Питера Редмонда и других гостей из Ирландской Лиги, организаторов и других участников. 

P.P.P.S.: Следите за нашей командой вк. Готовьтесь к конкурсу роботов-газонокосилок. На конкурс заявлено более 10 команд со всей России. Нам предложили проводить конкурс в Сколково.
- боевой робот
- arduino
- ардуино
- ардуино и радиоуправление
- arduino rc
- бронебот
- Блог компании Golf Robotics
- Робототехника
- DIY или Сделай сам
Битва роботов 2017 в Сочи. Как мы построили робота за 7 дней (на самом деле нет)
Трудности постройки, сколько стоит робот, регламент, который вроде есть, но на самом деле нет, и что происходит на шоу.
Многие наши решения могут показаться спорными, но, если на них взглянуть с точки зрения изначальных сроков, все выглядит несколько более логичным.
Внимание! Под катом много фото.

К обсуждению робота мы приступили 25 августа, а по изначальным требованиям организаторов готовый робот должен был быть предоставлен к 4 сентября. Мы прекрасно понимали, что этот срок будет сдвинут, но на сколько — большой вопрос, и это в дальнейшем сильно усложнило нам жизнь. Забегая вперед, скажу, что робот уехал от нас в первых числах октября.
(узел редуктора без стенок)
Тип робота и ограничения
При выборе концепции мы просто посмотрели какие роботы существуют и как они сражаются:
- Флиппер (робот, обычно с пневматическим опрокидывателем). Один из самых выигрышных вариантов, так как он может вернуться в правильное положение с помощью своего оружия. По правилам, робот, который не двигается в течение долгого времени — проигрывает. Мы откинули этот вариант из-за возможных сложностей с пневматикой, специалистов по пневматике у нас в команде не было, а времени не переделку тем более.
- Робот с вертикальной или горизонтальной пилой. Почти во всех видео эти роботы хорошо смотрелись до боя, но оружие отказывало при первом ударе и в целом не наносило противникам урон, кроме царапин.
- Оружие в виде топора, скобы на опоре выглядит очень ненадежно и пробить 5мм металл, разрешенный по правилам, такой штукой не просто.
- Робот под модным сейчас названием “спиннер” (вращающаяся над роботом массивная балка) показался нам наиболее простым в изготовлении и содержащий в конструкции наименьшее количество непроверенных моментов.
- Роботы с маховиком спереди сейчас тоже в моде, но они технологически похожи с нашим выбором, а круговой защиты оружием не имеют.
— вес — 110 кг;
— габариты не более 1200х1200.
На этом шоу с регламентом творились чудеса — нам две недели согласовывали одну стенку редуктора оружия 6 мм, а не 5, так как он уже был вырезан (хотя все что относится к оружию не имеет этих ограничений). В итоге на месте были допущены роботы со стенкой 10-15мм и высотой 100 мм при минимальной высоте 300 мм. В России сейчас, насколько я понимаю, две крупные организации, проводящие бои роботов. При желании участвовать в обоих проектах стоит помнить, что у вторых максимальные габариты 1500х1000.

(процесс сварки лопастей)
Управление
По управлению на самом деле альтернатив не очень много. Делать свое или купить готовое от радиоуправляемых моделей. Но в данном случае, ни по стоимости, ни по времени не вижу никакого смысла делать свое, будет дороже и дольше, даже с учетом того, что на борту все равно есть электроника своей разработки. Да и нормальный, эргономичный пульт городить удовольствие сомнительное. По регламенту аппаратура должна поддерживать функцию Fail-safe, в случае потери сигнала от передатчика приемник переводит все каналы в заранее заданное значение (оружие выключено, остановка движения). Мы поставили два набора управления, и в случае повреждения основного, система с команды извне переключалась на резервное.
Также, старые системы управления не имеют алгоритма работы на разных частотах и работают на фиксированном канале. На практике это привело к тому, что на показательных выступлениях одна команда не смогла тронуться с места — радиомикрофоны и видеотрансляция заняли канал полностью.
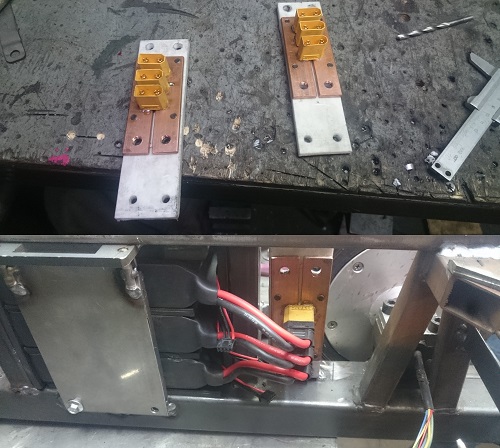
(шины питания моторов оружия, фторопластовые прокладки)
Передвижение
Из доступного выбора — автомодельные двигатели с регуляторами хода, АКБ на три минуты боя с запасом. Так делает большинство команд в мире, после мотора, редуктор и последнее звено это цепь на колесо. Для нас все хорошо, кроме редуктора. В наличии найти не удалось, а сделать это огромный пласт работ.
Из доступного здесь и сейчас были мотор-колеса от гироскутеров. 4 колеса по 350 китайских Вт должно было хватить с запасом и гарантией, так оно в общем то и вышло, но об этом позже. Из трудностей, кто пойдет по этому пути — напряжение мотор-колес гироскутеров 36В, модельные регуляторы на такое напряжение обычно вертолетные и не имеют заднего хода, мы чуть случайно не купили. Для управления моторами можно было бы сделать свой регулятор сразу с модельным управлением (от 1мс до 2мс на выходе приемника в зависимости от положения ручек), но на плату, детали, отладку ушло бы больше двух недель, да и на момент покупки вело-регуляторов, судя по отзывам, к ним не было претензий — просто в платах управления сделали преобразователь ШИМ → 0-5В.
На наш взгляд, с учетом полученного опыта, идеальным решением для 110 кг робота является два колеса и от 800Вт суммарной мощности.

(блокировочный болт, разочек спас наши руки и ноги)
Оружие
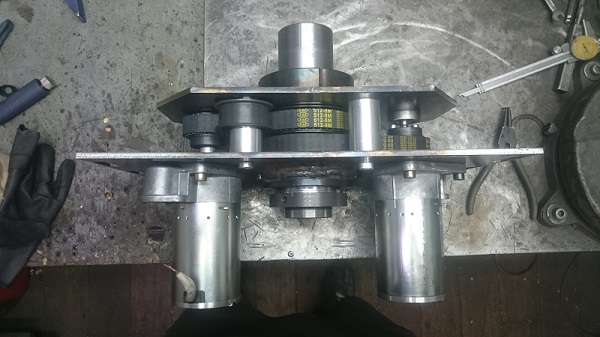
С точки зрения мощности и резервирования, мы изначально решили, что ротор с молотами будут крутить два двигателя. За неделю кроме авто-стартеров (по 1,5кВт, 12В) ничего под руку не попалось. Это было решение сродни наступлению на раскаленные грабли. Технический координатор проекта, с большим сомнением, сказал, что до нас многие пробовали, но не выходило. Пересчитав все еще раз, решили, что будет все нормально. Так оно почти и было… до самых последних дней перед отправкой. Обороты стартеров около 3000 в минуту без нагрузки и так как надо дать роботам противника въехать в зону действия молотов, а не просто царапать их, решили ременным редуктором понизить обороты до ~1500, что при скорости противника в 10 км/час обеспечивало “заход” на 70 мм в зону молотов. У японского прототипа было 7 небольших двигателей, крутящих большую шестерню. Ременной редуктор был выбран по временным причинам, шкивы в наличии, а ремни на заказ приходят за два-три дня, дополнительно это должно было защитить двигатели от разрушения при резкой остановке ротора о препятствие.

(на фото изготовленный на ЧПУ текстолитовый узел и притирка щеток)
Электроника
У большинства роботов установлены комплектующие от радиомоделей, но мы столкнулись с тем, что купленное модельное реле кратковременно (100-200мс) включено при подаче питания в независимости от положения органов управления передатчика. Учитывая, что в нашей схеме запускалось вращение 30кг ротора, использование этого реле было опасно, но так как на борту на каждой плате был контроллер, завели на него еще один канал с приемника, и включали реле через фильтр.
(процесс покраски, справа видны некоторые различия компоновки первого варианта от финального)
Название робота, команды и логотип
Это была самая простая задача из всех. Половина нашей команды делает кастомные мотоциклы на заказ — взяли их логотип и название. Вторая половина разрабатывает электронику для современных электропоездов, в том числе тяговые преобразователи мощностью более МВт.

(демпфера для защиты редуктора и моторов)
Сложности, которые у нас возникли
Весь робот по факту это две системы — тяга и оружие. У нас были проблемы и с тем и с другим.
По тяге все было хорошо, до момента установки на ротор молотов. После этого робот категорически отказался разворачиваться на месте и начали выгорать контроллеры.
Причину выгорания контроллера быстро установить не смогли, так как горели не все. Но в который раз пишу, что времени не было и мы посчитали, что силовые транзисторы горят по перенапряжению, так как инерция у робота большая, а алгоритм контроллеров мог быть с изъянами. Собрали схему с чоппером, чтобы сливать все перенапряжения на резистор, привезли осциллограф, подключили чоппер, и увидели, что напряжение поднимается максимум на 5В. По току превышений не было, больше идей тоже. Заменили сгоревшие транзисторы на нормальные, и случилось чудо — больше проблем с ними не было даже на шоу. Просто бракованная партия транзисторов (тут вспоминается случай как нам на производстве поставили микросхемы пустые внутри, но с нормальной маркировкой).
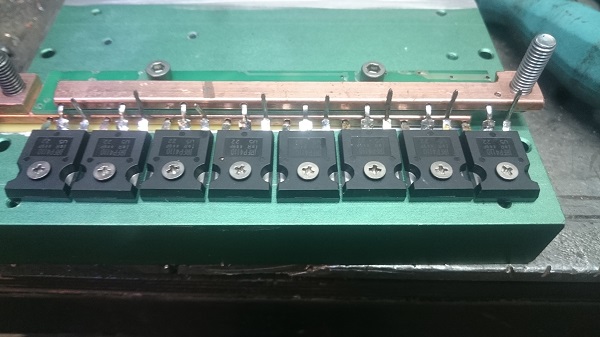
(шина с транзисторами для регулятора тока, который в итоге не был нами использован, так как работал на грани перегрева)
Вторая проблема это тяговые АКБ. С точки зрения экономии и доступности, взяли от гироскутеров. Они всем хороши, кроме максимального тока. В среднем такая батарея дает не более 50А и выключается по перегрузке. Нам, в пике, нужно было больше, так как одна батарея на два контроллера (передние и задние колеса запитаны и управляются отдельно для резервирования). Пришлось разбирать АКБ и отключать эту защиту физически, но стоит понимать что это метод спорный и допустим только при очень кратковременных и редких перегрузках.
На четырех колесах, чтобы развернуть на месте 100 кг, по моим ощущениям, нужно не меньше честных 1.2 кВт. На двух, это требование резко падает до 500Вт. Маневрирование даже для робота с “круговой защитой” оказалось очень важно. Мы недооценили этот фактор и сейчас переводим робота в двухколесный вариант.
Самое “приятное” нас ждало после того, как мы показали организаторам готового робота, но без молотов на лопастях. То есть технически робот был допущен, но по факту стартеры горели через 7-12с после запуска, а молоты пришли как назло в последний момент.
Было принято несколько мер: притирка щеточных узлов, изготовление плавящегося, пластикового держателя щеток из текстолита на ЧПУ. Эти меры значительно снизили потери, но выделяемая мощность была слишком велика.

(окончание монтажа)
До отправки оставалось три дня, надежный регулятор тока на 200А, за этот срок, из деталей, которые были в Питере сделать не удалось, а доставки за день не нашли. Нам пришлось идти на отчаянный шаг, снижать обороты более, чем в два раза, прощаться с резервированием оружия и включать моторы последовательно. Эти меры помогли и на месте, с моторами проблем уже не было. На данный момент, без спешки ищем другие двигатели. Стартеры стабильно работают, но их использование не может быть оправдано ничем, кроме сроков (суммарно для тестов и запаса мы купили 7 стартеров).
Стоимость
Конечная стоимость робота составляет около 230 т.р. Это со всеми запчастями, двойным управлением, сгоревшими стартерами и всем прочим. Если делать в более спокойном ритме, полагаю можно уложиться в 190 тысяч. Файл рабочий, поэтому в нем не все по разделам, но зато не подогнанный.

Шоу
В итоге, мы приняли участие в 3-х боях. Это показательное уничтожение монитора, отборочный бой, и показательная битва помощника Германа Грефа и кого-то из правительства. Так как правами на трансляцию шоу не обладаю, вставлю одно видео с уничтожением телевизора, снятое нами:
В 3 бою, ротор нам оторвало, а у противника выворотило ось вместе с подшипником. Болты на более мощные мы поменяли, но по факту это был самый трудный случай, так как матанга противника крутилась во встречном нашему ротору направлению.
Из незабываемого это ремонт ночью робота в боксах формулы один:

По судейству осталось множество вопросов и не только у нашей команды. В нашем бою к участию был допущен робот, с неработающим оружием изначально, который и прошел дальше. Организаторы предлагали нам довольно странные “спорные бои” для тех кто выбыл сомнительно, но мы отказались, так как мы либо прошли, либо нет. Рыбы второй свежести не бывает.
С допуском роботов тоже стоит крепко подумать. Когда больше трети роботов не проходят по регламенту, но допускаются в основную сетку, это странно и точно не ведет к повышению доверия.
В регламенте есть общие фразы о том, что “робот не должен быть не разрушаем”. Эту фразу стоит убрать или уточнить. Возьмем победителя — это отлично собранный флиппер с трубчатым каркасом, что у него разрушаемо? Так как его подъемная платформа считается оружием, в ее начале утолщение более 5 мм. Флипперы победили и в прошлом году. Для интереса к шоу, явно стоит подумать об уравнивании шансов, чтобы не получить одних флипперов в следующих шоу — бой двух флипперов довольно унылое зрелище. Исходя из “критикуя-предлагай”, я вижу решение в убирании бортиков, так как флиппер просто закидывает туда всех соперников и бой решается на первых секундах. То что победитель в этом году опрокидывал роботов обратно, была его добрая воля и не факт, что другие поступят так же, а это сильно сказывается на впечатлении от шоу. Шнеки так же стоит ставить вплотную к стеклу, иначе единственный вид роботов, который может туда закинуть — флиппер.
Шоу для зрителей было великолепно. Звук, свет, сценарий — реально круто и захватывало. Светящиеся танцоры — идея не новая, но вживую видел впервые и это также цепляло (один из таких костюмов мы успели починить за несколько секунд до выступления на финальном шоу, не смотря на то, что мы в нем не участвовали — хоть в чем то пригодились). Я благодарен тем людям, которые провели такой огромный объем работ. Планка была поднята чрезвычайно высоко, будем следить за развитием событий.
П.С. Статья получилась немного о роботе и немного о шоу, но на две отдельные статьи, на мой взгляд, материал не тянул, а разбавлять их тем как мы здорово посетили Скайпарк, Роза Хутор и с кем познакомились, для технического ресурса решение было бы сомнительное.
- Робототехника
- DIY или Сделай сам
Как сделать боевого робота с пилой на радиоуправлении

Первый робот для боя, этот с пилой, свои варианты о том с каким оружием сделать робота пишите в коментариях. Для этого нам нужно: 1. Двигатели и колеса https://s.click.aliexpress.com/e/_dXV2Wux 2. Регулятор оборотов двигателя https://s.click.aliexpress.com/e/_d9em2if 3. Шасси и двигателями https://s.click.aliexpress.com/e/_dVgRXmL Скачать детали можно тут https://www.thingiverse.com/thing:4352547 . Привет! Ты на канале поделок. Я делаю разные интересные вещи и подробно показываю процесс. Самые интересные плейлисты на канале: 1. Как сделать машинку на радиоуправлении: https://www.youtube.com/playlist?list=PLiepfArhO9k-BafmZgUuMILJsgg1J5z-W . 2. Поделки своими руками https://www.youtube.com/playlist?list=PLiepfArhO9k8c5qLnaZr6Xi7loWfM_c0h . Наша группа в контакте ждет тебя https://vk.com/sciencevetalofficial .
Показать больше
Войдите , чтобы оставлять комментарии
КАК СДЕЛАТЬ БОЕВОГО РОБОТА ИЗ КАРТОНА НА РАДИОУПРАВЛЕНИИ
Aliexpress: https://is.gd/37pTZ9 Remote control: https://goo.gl/WNtA6L Little motors: https://is.gd/bxiAP7 Всем привет, в одном из прошлых видео я просил вас написать в комментариях, что мне собрать в очередном ролике.И вот по просьбе одного из подписчика я сделал Боевого робота из картона на радиоуправлении! Для сборки боевого робота мне понадобилось: 4 колеса, 2 моторчика, 2 подшипника, Блок ДУ и Картон! Для движения робота я использовал два моторчика и присоединил каждый из них к одному колесу. Остальные два колеса свободно крутились на подшипниках! Это дало возможность ездить боевому роботу в любом направлении. Туловище и руки я сделал из картона! Добро пожаловать на канал SabaVideo! Как сделать своими руками. Интересные и полезные Лайфхаки. Что внутри и многое другое на канале SabaVideo! ****************************************************** ►Подпишись на канал: https://goo.gl/aACmSq ►Моя партнерка: http://join.air.io/saba
Показать больше
Войдите , чтобы оставлять комментарии