Сервопривод Ардуино подключение, управление

Схема подключения сервопривода к Arduino обычно следующая: черный провод присоединяем к GND, красный провод присоединяем к 5V, оранжевый/желтый провод к цифровому выводу общего назначения. Управление сервоприводом на Ардуино достаточно просто, но по углам поворота сервомоторы делятся на 180° и 360°, что следует учитывать при разработке проектов с применением servo.

| Servo | Arduino Uno | Arduino Nano | Arduino Mega |
| черный провод | GND | GND | GND |
| красный провод | 5V | 5V | 5V |
| желтый провод | 11 | 11 | 11 |
В первом скетче мы рассмотрим как управлять сервоприводом на Arduino с помощью команды myservo.write(0) . Также мы будем использовать стандартную библиотеку Servo.h . Подключите сервомашинку к плате Ардуино, согласно схеме на фото выше и загрузите готовый скетч. В процедуре void loop() мы будем просто задавать для сервопривода необходимый угол поворота и время ожидания до следующего поворота.
Скетч для управления сервопривода от Ардуино
#include Servo.h> // подключаем библиотеку для работы с сервоприводом Servo servo1; // объявляем переменную servo типа "servo1" void setup() < servo1.attach(11); // привязываем сервопривод к аналоговому выходу 11 > void loop() < servo1.write(0); // ставим угол поворота под 0 delay(2000); // ждем 2 секунды servo1.write(90); // ставим угол поворота под 90 delay(2000); // ждем 2 секунды servo1.write(180); // ставим угол поворота под 180 delay(2000); // ждем 2 секунды >
Пояснения к коду:
- переменная Servo необходима, чтобы не запутаться при подключении нескольких сервоприводов к Ардуино. Мы назначаем каждому приводу свое имя;
- команда servo1.attach(10) привязывает привод к цифровому выходу 10.
- в программе мы вращаем привод на 0-90-180 градусов и возвращаем в начальное положение, поскольку процедура void loop повторяется циклично.
Плавное вращение сервомотора от Ардуино
Управление скоростью вращения сервомотора Ардуино сделать довольно просто, если вы знакомы с циклами for или while в языке программирования Arduino. Рассмотрим, как сделать плавные повороты серво от 0 до 90 градусов, используя циклы. Представленные на этой странице примеры программ позволят вам использовать сервоприводы в различных проектах, где требуется плавный поворот.
Скетч для плавного поворота серво Ардуино
#include "Servo.h" Servo servo; int angle; // переменная для угла поворота микро серво void setup() < servo.attach(11); // пин для подключения микро серво > void loop() < // цикл для поворота от 0 до 90 градусов for (angle = 0; angle write(angle); // сообщаем микро серво угол поворота delay(20); // ждем 20 мс, пока серво не сделает поворот > // цикл для поворота от 90 до 0 градусов for (angle = 90; angle >= 0; angle--) < servo.write(angle); // сообщаем микро серво угол поворота delay(20); // ждем 20 мс, пока серво не сделает поворот > >
Пояснения к коду:
- максимальный угол для плавного поворота микросерво — 180 градусов;
- увеличивая задержку delay(20); , можно замедлить скорость поворота.
Также вам будет полезны следующие статьи:
Заключение. Сервомоторы часто используются в различных проектах на Ардуино для различных функций: повороты конструкций, движение частей механизмов. Так как серво Arduino постоянно стремится удерживать заданный угол поворота, то будьте готовы к повышенному расходу электроэнергии. Это будет особенно чувствительно в автономных роботах, питающихся от аккумуляторов или батареек.
Разработка сервопривода с BLDC мотором
Открытый проект серво‑контроллера MC50 продолжает развиваться. На этот раз поговорим о создании сервопривода.
Сервоприводы в умном доме нужны повсеместно: в запорных кранах, в электрических замках, в моторизированных кронштейнах, столах, жалюзи, в автоматических дверях, калитках, окнах, маркизах, воротах, поворотных видеокамерах, регулируемых креслах, электро‑пандусах и проч. Поэтому технология сервоприводов весьма востребована и тут есть где развернуться творчеству.
Предыдущие статьи по теме проекта MC50
- Схема и плата контроллера
- Первые шаги по программированию контроллера
- Развёртывание промежуточного программного обеспечения
- Отладка взаимодействия с интернетом
- 6-шаговая коммутация BLDC моторов
В прошлой статье было показано как заставить BLDC мотор крутиться с помощью периферии микроконтроллера S5D9 семейства Renesas Synergy™
Теперь это вращение надо заставить делать полезную работу. Сторонние наблюдатели могут сказать, что работа уже сделана если мотор вращается, цель достигнута. Ставь редуктор и в прод. Но на самом деле проблемы только начинаются.
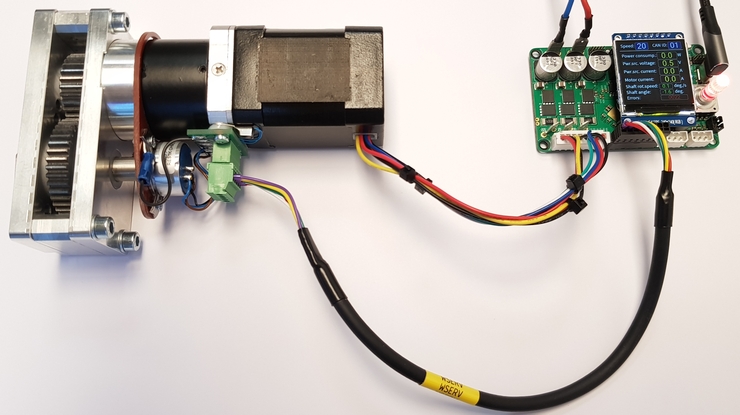
Конструкция
Конструкция состоит из мотор‑редуктора, дополнительного редуктора 29/40, простого узла с серво‑потенциометром для контроля за скоростью выходного вала и термистором для контроля за температурой мотора. Как видно, внешний редуктор даёт удобно разместить серво‑потенциометр. Дополнительно он увеличивает момент силы 1.3 раза Такая конструкция в разных масштабах встречается во множестве сервоприводов.
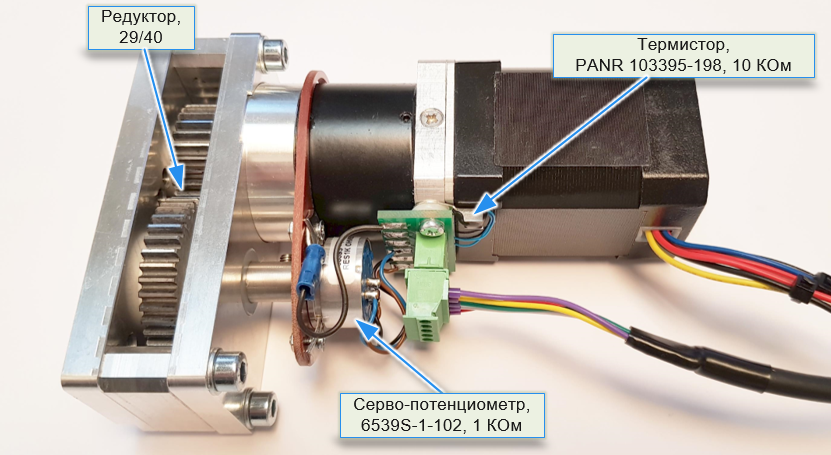
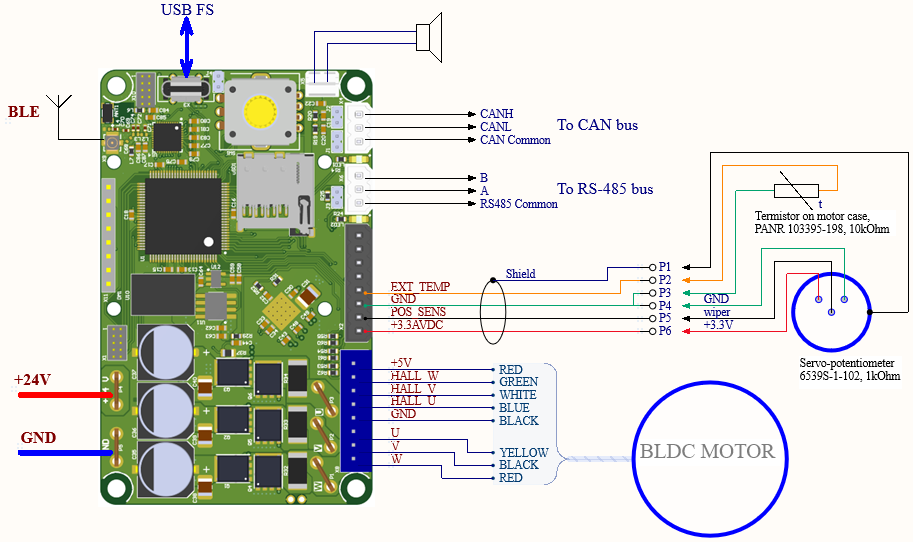
Схема подключения
Плата серво‑контроллера рассчитана на питание от внешнего источника напряжением от 20 до 30 В. Но силовой драйвер продолжает функционировать при понижении напряжения до 7 В. При отсутствии внешнего источника напряжения плата может питаться от USB, но силовой драйвер при этом функционировать не будет.
О частоте вращения BLDC мотора
Частота вращения BLDC двигателя определяется приложенным к нему напряжением при условии постоянной нагрузки на валу (считаем что 6-шаговая коммутация в это время работает безукоризненно, напряжение меняем ШИМ‑ом). Эта частота записывается в даташите на мотор. Если момент силы нагрузки будет больше или меньше, то частота будет разная при неизменном напряжении. Но мы не знаем точно момент силы нагрузки и он скорее всего будет переменным.
Для идеального двигателя без нагрузки, без трения и без сопротивления обмоток частоту вращения при определенном напряжении можно узнать вращая мотор внешним приводом до достижения заданного напряжения. Частота вращения в этот момент и будет искомой частотой. Но тут важна форма напряжения. Применив 6-шаговую коммутацию к мотору с синусоидальной обратной ЭДС, не получится получить ту же частоту.
Идеальный BLDC двигатель будет крутиться с бесконечной частотой при подаче на него бесконечного напряжения. У реального же BLDC двигателя в какой‑то момент сначала наступит насыщение магнитопровода, резко повысится ток через обмотки, обмотки раскалятся и спустя некоторое время мотор загорится. Поэтому частота вращения и допустимый момент силы ещё ограничиваются температурой мотора.
Разработка архитектуры управления.
Если для для управления голым двигателем архитектура достаточно ясна, то для управления сервоприводом с неизвестной динамикой нагрузки все несколько сложнее.
Для начала отметим, что частота вращения ротора не равна частоте вращения сервопривода, а в динамике с реальной механикой с люфтами и упругими реакциями даже не пропорциональна.
Для управления частотой вращения самое лёгкое решение — это просто менять скважность широтно‑импульсной модуляции (ШИМ).
При постоянном моменте силы нагрузки на мотор или ручном управлении все довольно хорошо получается. Мы линейно меняем скважность и добиваемся нужной частоты вращения. Коммутация автоматическая с помощью датчиков Холла находящихся в моторе. Метод отлично работает в самокатах.
Но как только момент силы начнёт меняться частота вращения начнёт пульсировать, как показано на видео ниже.
Самое очевидное решение — это применить PID управление с обратной связью по частоте вращения. К сожалению все не так просто. Серво‑приводы могут предназначаться для управления угловой скоростью или для управления положением, в обоих случаях нужны разные алгоритмы. И в обоих случаях простой одноконтурный PID очень плохо работает. В случае со стабилизацией положения нужен регулятор с переходной характеристикой не менее третьего порядка. А PID имеет второй порядок. т. е. оставаясь в рамках PID нужно две петли управления, вложенные одна в другую. Нам нужна хорошая, быстрая, оптимизируемая, масштабируемая реализация PID алгоритма.
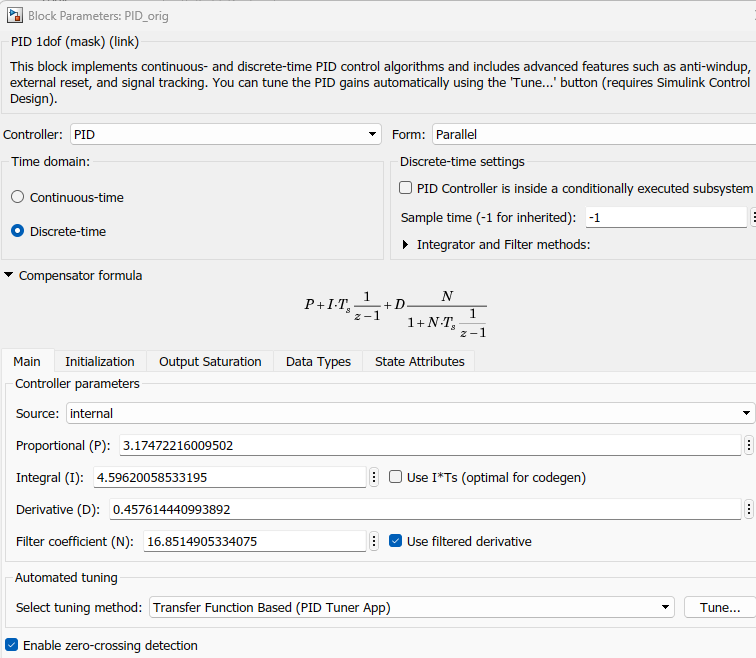
Такая реализация есть в среде MATLAB Simulink в виде модели конвертируемой в исходники на C. Ниже представлена модель в виде открытой расширяемой подсистемы.
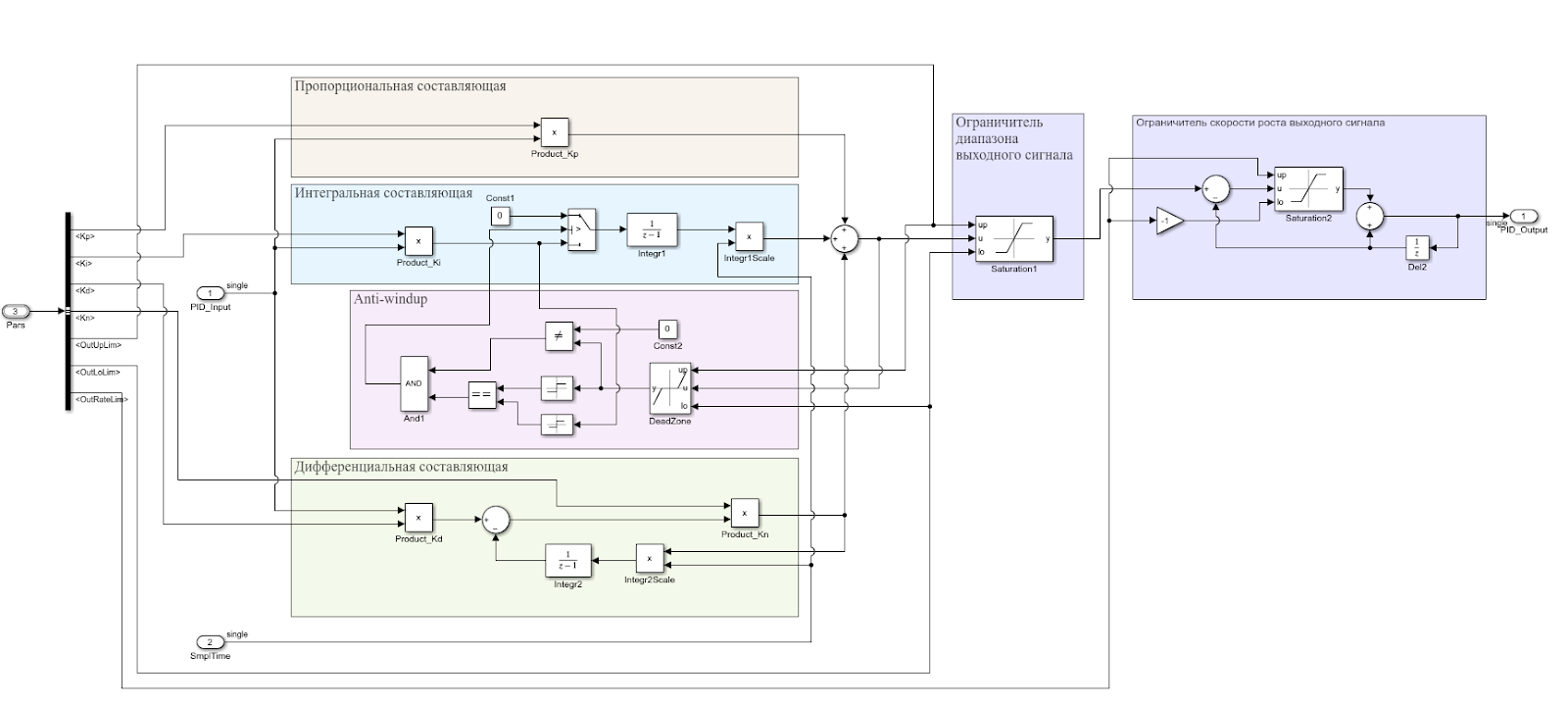
Модель повторяет функциональность встроенного PID компонента Simulink, но при этом выводит все коэффициенты PID как входные аргументы в одной шине. Аргументы можно менять и в стандартном компоненте используя символьные обозначения переменных из рабочего пространства, но это влечёт за собой неявные зависимости приводящие к ошибкам. А шина обеспечивает генерацию аргумента как передаваемой структуры. Это уменьшает объем кода при интеграции модели в embedded проект и упрощает рефакторинг моделей.
Для предотвращения бесконечного нарастания интегральной составляющей (anti‑windup) применён метод clamping.
Кроме того, в нашей модели реализован ограничитель скорости нарастания выходного сигнала. Это вносит дополнительную защиту в модель от предельных осцилляций в случае использования некорректных начальных коэффициентов во время тюнинга.
Сгенерированные из модели исходники находятся в директории MATLAB_PID.
Выбор одноконтурного или двухконтурного управления скоростью вращения серво-привода.
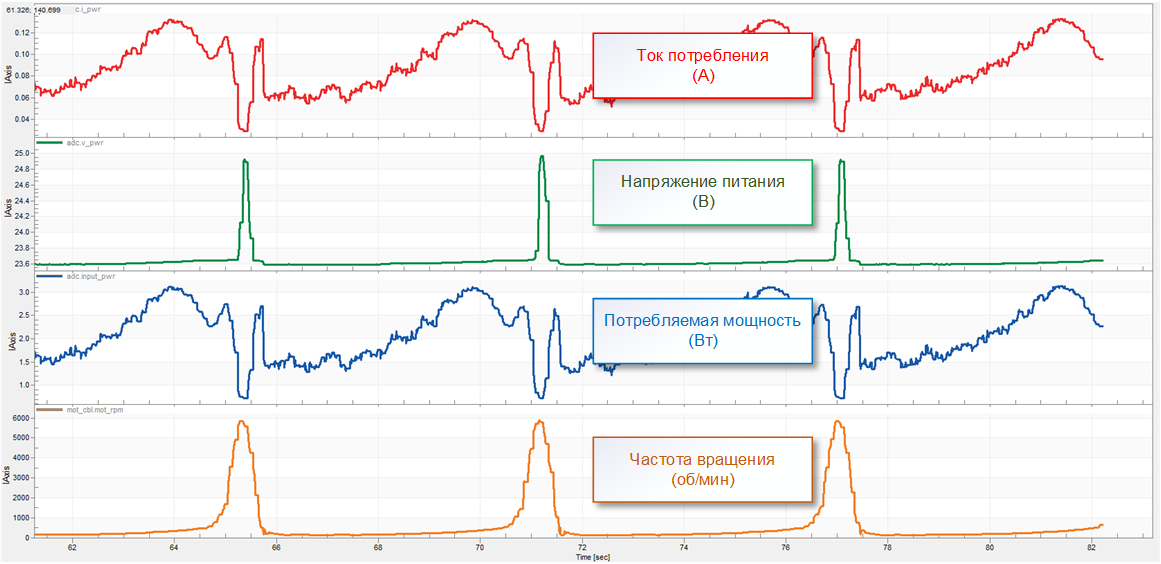
Чтобы сделать выбор архитектуры петли управления проведём эксперимент. Сделаем в среде FreeMaster две записи сигналов в разных режимах управления мотором. Записывать будем одновременно четыре сигнала:
- сигнала включения,
- тока протекающего через мотор,
- состояния датчиков Холла, отражающих скорость вращения ротора,
- скорость выходного вала привода.
Первая запись ниже сделана во время скачкообразного включения вращения мотора в режиме 6-step с максимальным напряжением.
Вторая запись ниже сделана во время скачкообразного включения вращения мотора в режиме 6-step с удержанием постоянного тока через мотор с помощью петли управления током.
Если посмотреть на реакцию скорости выходного вала на скачок воздействия, то на первой записи видна крайне нелинейная кривая скорости. На второй записи скорость достаточно линейно нарастает, но нарастание начинается с некоторой задержкой.
Очевидно в первом случае практически трудно будет проводить регулировку скорости регулируя алгоритмом PID скважность ШИМ. Во всяком случае с интервалом регулирования меньшим 0.1 сек. Поскольку скорость откликается совершенно не похожим на линейную систему образом. А классический PID хорош только для линейных систем.
Во втором случае отклик гораздо более линейный и PID здесь подойдёт. Вернее тут подойдёт простой PI контур, поскольку отклик демонстрирует инерциальную нагрузку без упругости (осцилляций). Но надо помнить — тут уже применён высокоскоростной контур поддержки заданного тока. т. е. в данном случае у нас получится 2-контурная система: быстрый PI контур управления током через ШИМ и медленный PI для управления скоростью через задание тока.
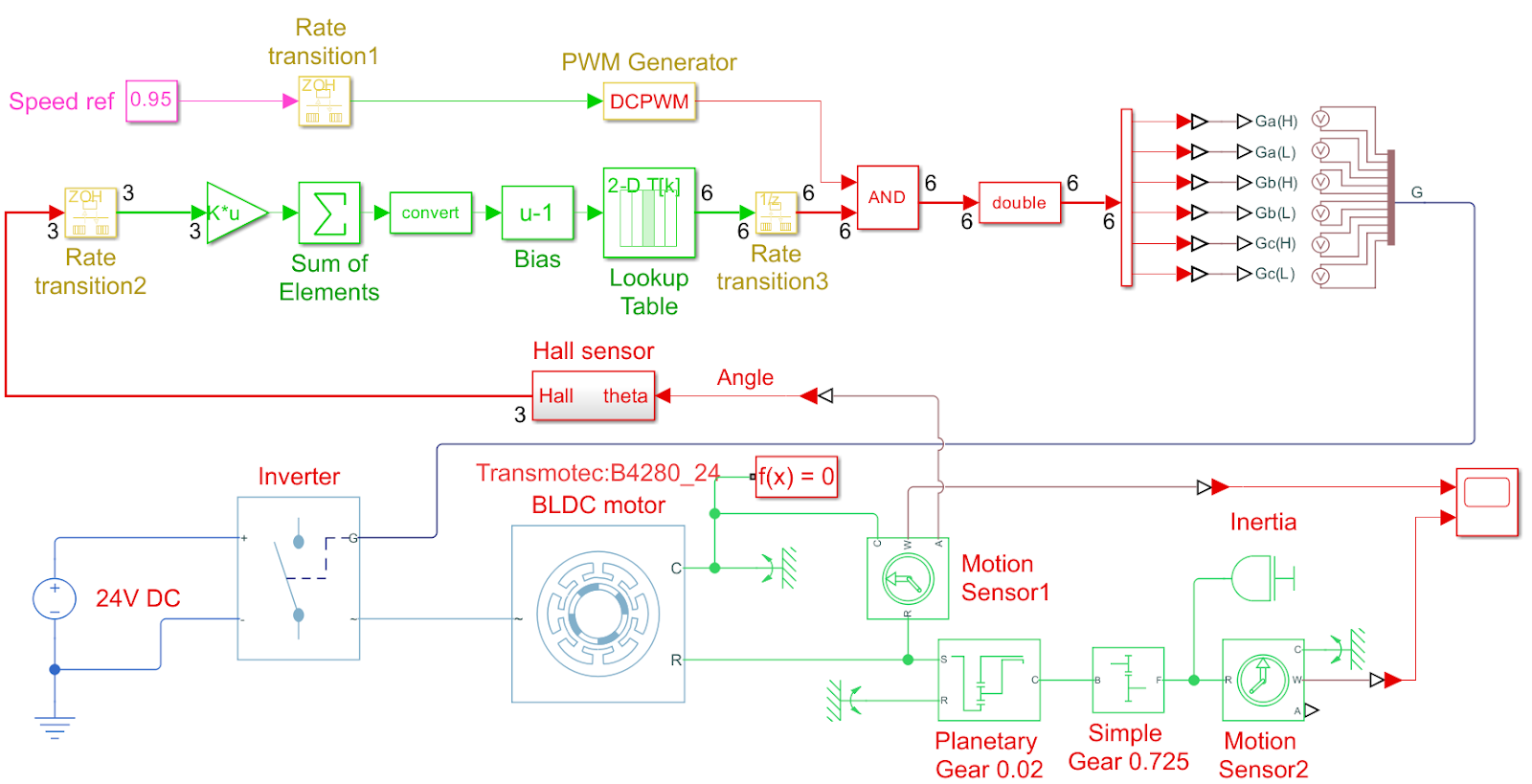
В итоге пришли к следующей архитектуре в составе модели Simulink :
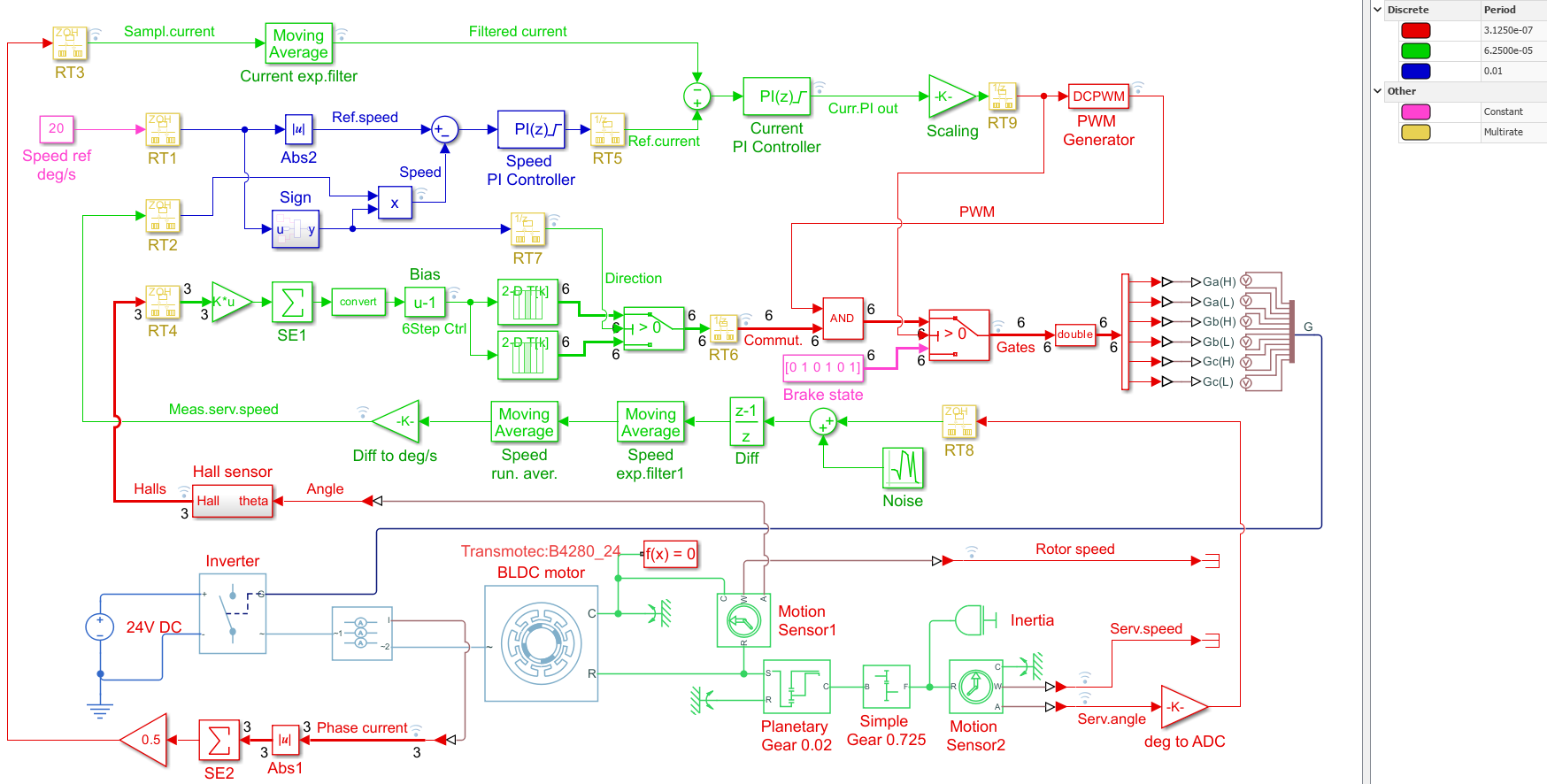
Модель включает мотор-редуктор с планетарной передачей и датчиками Холла, внешний редуктор, серво сенсор с моделью измерения скорости включая шумы измерения, 3-фазный инвертер с CMOS транзисторами, ШИМ модулятор и два контура управления: по скорости и по току. Цветами на модели выделяются участки работающие с разной частотой тактирования. Контур тока работает на частоте 16 Кгц, контур скорости на частоте 100 Гц.
Измерения частоты вращения ротора датчиками Холла
В модели показанной выше частота вращения ротора измеряется по датчикам Холла. Но в реальности оказалось, что измерение длительности интервалов между фронтами импульсов с датчиков плохо подходит для определения частоты вращения ротора. Из графика ниже следует, что при постоянной частоте разница в длительностях интервалов может составлять до 30%. Такая погрешность потом выразится в недостаточной точности или быстроте стабилизации частоты вращения.

В нашей программе мы применяем иной способ измерения частоты вращения. Таймера захватывают время каждого фронта сигнала, но разницу считают не от предыдущего фронта, а от последнего фронта того же полюса.
Используется логика захвата таймеров GPT3211 и GPT3212 (согласно хидеру из SSP они имеет имена R_GPTB3 и R_GPTB4). Таймера имеют по два модуля захвата, поэтому для сигналов с трех датчиков нужно два таймера. Таймера тактируются абсолютно синхронно благодаря команде одновременного запуска (все таймера в Synergy можно запустить синхронно).
Здесь фрагмент того как производится измерение в обработчике прерываний от АЦП:
st = R_GPTB3->GTST; // Читаем флаги состояния capture таймера GPT3211 if (st & BIT(0)) // Проверяем флаг TCFA. Input Capture/Compare Match Flag A < // Здесь если событие захвата произошло R_GPTB3->GTST = 0; // Очищаем флаг захвата и остальные флаги. // За другие флаги захвата не беспокоимся, поскольку они при штатной работе не могут быть взведены в этот момент. val = R_GPTB3->GTCCRA; // Читаем регистр с захваченным состоянием счетчика // Здесь рассчитываем разницу по отношению к предыдущему захваченному значению на том же угле поворота ротора, т.е. для полюса с номером в переменной hall_u_cnt if (hall_u_prev_arr[hall_u_cnt] > 0) < if (val >hall_u_prev_arr[hall_u_cnt]) < hall_u_capt_arr[hall_u_cnt] = val - hall_u_prev_arr[hall_u_cnt]; >else < // Корректируем если было произошло переполнение счетчика между захватами hall_u_capt_arr[hall_u_cnt] = 0x7FFFFFFF -(hall_u_prev_arr[hall_u_cnt] - val -1); >hall_u_capt = hall_u_capt_arr[hall_u_cnt]; // Сохраняем разницу в промежуточную переменную. Эта переменная используется при отладке через FreeMaster // . one_turn_period = hall_u_capt; // Записываем длительность полного оборота ротора в глобальную переменную для дальнейшего использования остальными задачами // . > hall_u_prev_arr[hall_u_cnt] = val; // Сохраняем текущее захваченное значение в переменную предыдущего значения hall_u_cnt++; // Ведем счет полюсов. Для каждого полюса сохраняется своя измеренная величина if (hall_u_cnt >= 8) hall_u_cnt = 0; // Определяем направление вращения h = R_IOPORT5->PCNTR2 & 0x7; // Читаем сигналы датчиков Холла здесь снова, несмотря на то что они уже были прочитаны в обработчике прерывания // Это нужно поскольку capture логика может сработать уже после того как в ISR были прочитаны состояния датчиков if ((h == 0b100) || (h == 0b011)) rotating_direction = 1; // Направление вращения определяем по паттернам сигнало с датчиков сразу после текущего фронта else if ((h == 0b010) || (h == 0b101)) rotating_direction = -1; R_GPTB5->GTCLR_b.CCLR13 = 1; // Сброс счетчика отслеживающего остановку вращения R_GPTB5->GTST = 0; // Сброс флагов счетчика отслеживающего остановку вращения > if (st & BIT(1)) < // Input capture/compare match of GTCCRB occurred R_GPTB3->GTST = 0; val = R_GPTB3->GTCCRB; if (hall_v_prev_arr[hall_v_cnt]>0) < if (val >hall_v_prev_arr[hall_v_cnt]) < hall_v_capt_arr[hall_v_cnt] = val - hall_v_prev_arr[hall_v_cnt]; >else < hall_v_capt_arr[hall_v_cnt] = 0x7FFFFFFF -(hall_v_prev_arr[hall_v_cnt] - val -1); >hall_v_capt = hall_v_capt_arr[hall_v_cnt]; one_turn_period = hall_v_capt; > hall_v_prev_arr[hall_v_cnt] = val; hall_v_cnt++; if (hall_v_cnt >= 8) hall_v_cnt = 0; h = R_IOPORT5->PCNTR2 & 0x7; // Читаем сигналы датчиков Холла здесь чтобы они были прочитаны не раньше чем стработает capture логика if ((h == 0b110) || (h == 0b001)) rotating_direction = 1; else if ((h == 0b011) || (h == 0b100)) rotating_direction = -1; R_GPTB5->GTCLR_b.CCLR13 = 1; // Сброс счетчика отслеживающего остановку вращения R_GPTB5->GTST = 0; > st = R_GPTB4->GTST; if (st & BIT(0)) < // Input capture/compare match of GTCCRA occurred R_GPTB4->GTST = 0; val = R_GPTB4->GTCCRA; if (hall_w_prev_arr[hall_w_cnt]>0) < if (val >hall_w_prev_arr[hall_w_cnt]) < hall_w_capt_arr[hall_w_cnt] = val - hall_w_prev_arr[hall_w_cnt]; >else < hall_w_capt_arr[hall_w_cnt] = 0x7FFFFFFF -(hall_w_prev_arr[hall_w_cnt] - val -1); >hall_w_capt = hall_w_capt_arr[hall_w_cnt]; one_turn_period = hall_w_capt; > hall_w_prev_arr[hall_w_cnt] = val; hall_w_cnt++; if (hall_w_cnt >= 8) hall_w_cnt = 0; h = R_IOPORT5->PCNTR2 & 0x7; // Читаем сигналы датчиков Холла здесь чтобы они были прочитаны не раньше чем стработает capture логика if ((h == 0b101) || (h == 0b010)) rotating_direction = 1; else if ((h == 0b110) || (h == 0b001)) rotating_direction = -1; R_GPTB5->GTCLR_b.CCLR13 = 1; // Сброс счетчика отслеживающего остановку вращения R_GPTB5->GTST = 0; >
Здесь мы получаем значение частоты вращения c девиацией меньшей 0.3%, но с гораздо большей задержкой чем могли бы получить измеряя длительности между соседними фронтами. Но в последнем случае нам пришлось бы применить фильтр, который внёс бы ещё большую задержку.
Экстраполяция частоты вращения при внезапной остановке
Вращение ротора может внезапно прекратится при встрече сервопривода с препятствием. Но тогда блок расчёта частоты вращения по датчикам Холла просто не будет выполняться. В результате показания частоты застынут, а алгоритм 6-шаговой коммутации застынет на постоянном включении одной ветви обмотки. Поэтому нужно реализовать блок экстраполяции частоты вращения при отсутствии сигналов с датчиков Холла. Пример реализации показан ниже.
// Блок линейно понижающий скорость в случает отсутствия сигналов с датчиков Холла if (one_turn_period != 0) < if (R_GPTB5->GTST & BIT(6)) // Проверяем флаг TCFPO. Overflow Flag < // В случае переполения тамера сразу отмечаем скорость как нулевую. // Поскольку переполение таймера происходит с периодом в две секунды, то такую низкую скрость принимаем как нулевую one_turn_period = 0; >else < // За один оброт мотора мы имеем 8 полюсов * 3 датчика = 24 события сброса таймера R_GPTB5 // И если таймер R_GPTB5 смог набрать 2/3 (16/24) длительности одного оборота и не был сброшен значит скорость упала // и можно начинать снижать оценку текущей скорости uint32_t no_edge_period = R_GPTB5->GTCNT*16; if (no_edge_period > one_turn_period) < one_turn_period = no_edge_period; >> >
Через некоторое время показатель частоты вращения упадёт до нуля и алгоритм управления скоростью примет решение об отключении тока.
Влияние способа коммутации силовых транзисторов на качество управления и энергопотребление
В прошлой статье о 6-шаговом управлении коммутацией были показаны несколько способов переключения транзисторов при ШИМ модуляции. В нашей программе оставлено два способа. Между ними можно выбирать с помощью настройки параметра Enable soft commutation.
На нашем мотор‑редукторе эти два способа показали только незначительные различия. При одинаковой частоте вращения ток потребления был идентичным. Но при мягкой коммутации вращение мотора начиналось при меньшем значении коэффициенте заполнения. Дело в том, что мотор из‑за трения не начинает крутиться до того момента как коэффициент заполнения ШИМ не превысит некий порог. Этот порог в случае жёсткой коммутации в нашем случае был в районе 55%, а в случае мягкой коммутации в районе 30%. т. е. мягкая коммутация даёт больший диапазон регулирования ШИМ — 70%, в противовес жёсткой — 45%. Это отражается потом и на качестве управления частотой вращения. При мягкой коммутации качество управления несколько лучше.
Способ коммутации выбирается параметром en_soft_commutation.
Регулировка тока затворов силовых транзисторов
На плате серво‑контроллера используется микросхема драйвера TMC6200. Микросхема получает сигналы от микроконтроллера и управляет затворами силовых транзисторов. Микроконтроллер не может напрямую управлять затворами поскольку там нужны высокие напряжения и довольно большие импульсные токи.

У этой микросхемы есть возможность через интерфейс SPI задавать уровень выходных токов на затворы. Есть 4 уровня: от самого слабого 400…600 мА до самого сильного 1200…1800 мА.
Как показали испытания всех возможных уровней, на ток потребления они практически не влияют. Измерения мощности при работе двигателя весьма зашумлены, и с учётом этого шума возможно допустить наличие некоторой разницы в пределах 100 мВт.
Силовые транзисторы на схеме подобраны оптимально по отношению к драйверу, поэтому регулировка его силы не оказывает заметного влияния. Стоит ожидать в общем случае, что чем больше ток драйвера тем больше в нем будет потерь. В настройках программы можно свободно менять уровни токов, а также уровни детекции и защиты от коротких замыканий.
Управлять настройками драйвера TMC6200 можно с помощью ряда параметров. Настройки загружаются при старте основной задачи управления мотором.
Калибровка смещения токовых усилителей драйвера TMC6200
Микросхема TMC6200 имеет встроенные усилители напряжения с токовых шунтов расположенных в фазах серво драйвера. Наличие встроенных усилителей упрощает схему. Есть возможность менять коэффициент усиления через интерфейс SPI.
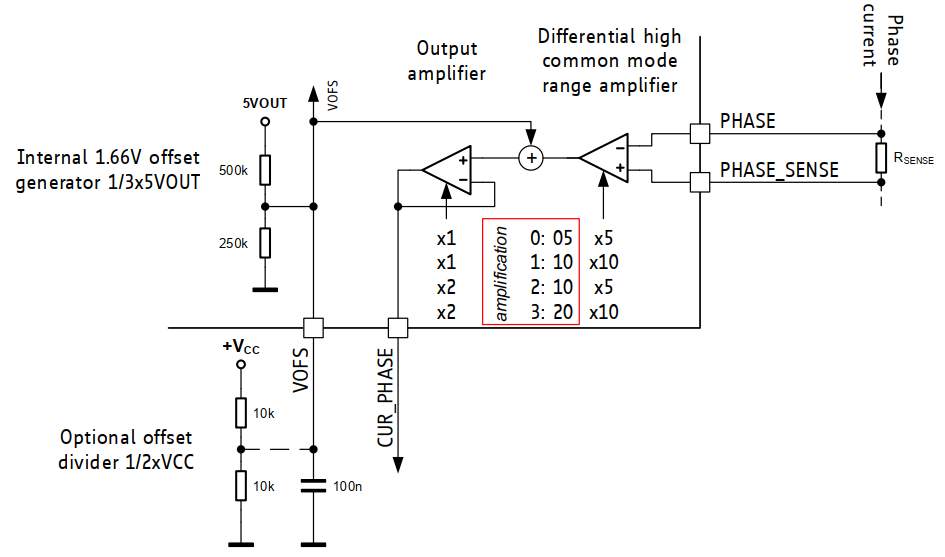
Однако недостатком этих усилителей является довольно большое напряжение смещения. Ещё хуже, то что оно сильно зависит от температуры микросхемы. Но мало того, оно разное для каждого из 3 усилителей и может меняться во времени даже при постоянной внешней температуре. В нашей программе используется самый чувствительный режим с усилением в 20 раз. При таком усилении смещение на выходе усилителей достигает 240 мВ и более.
Решение проблемы найдено в том что перед каждым включением мотора производится перекалибровка смещения нуля для каждого из 3 усилителей. Перекалибровка длится около 15 мсек и существенного влияния на быстродействие не оказывает.
Что делать с обратной ЭДС?
Как только мотор начинают крутить внешние силы вместо нашего драйвера он превращается в генератор. В генератор мотор также превращается на короткие промежутки времени когда происходит торможение. Если частота вращения вызванная внешними силами превышает частоту вращения на номинальном напряжении при холостом ходе, то повышается напряжение на шине питания. Ниже на осциллограмме показаны скачки напряжения на шине питания когда сервопривод вращает груз на рычаге с постоянным значением ШИМ. В моменты опускания груза напряжение на шине питания повышается на 5.5 В. Это происходит потому что частота вращения ротора в эти моменты превышает максимальную частоту вращения на номинальном напряжении по даташиту.

Если бы мы управляли скоростью и не давали разгоняться сервоприводу, то таких выбросов напряжения не было бы. Однако скачки напряжения могут возникнуть и при выключенном состоянии сервопривода. Тогда стратегия такая. Когда напряжение достигнет уровня достаточного для включения процессора, он сразу подаёт сигнал включения на все нижние транзисторы. Транзисторы закорачивают обмотки мотора и напряжение спадает.
Проблема определения скорости вращения серво-потенциометра
Если внимательно посмотреть на сигнал приходящий с серво‑потенциометра установленного на выходном валу, то можно заметить, что он содержит довольно существенный шум.
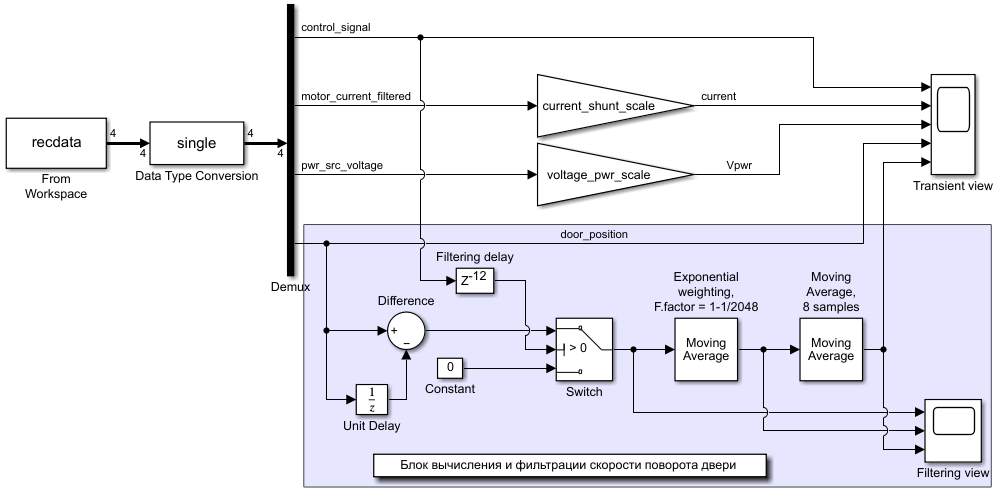
Чтобы найти скорость надо получить функцию дифференциала угла поворота от времени. При цифровом управлении это будет просто разница между текущим и предыдущим положением. Как видно из скриншота, после такой операции получается абсолютно зашумлённый сигнал. В этом случае применяем глубокую двухступенчатую фильтрацию. Фильтрацию выполняем с частотой ШИМ т.е. 16 КГц.
Поскольку фильтр вносит фазовую задержку мы не можем на основе такого отфильтрованного сигнала управлять как угодно быстро и точно.
Для того чтобы узнать задержку в результате фильтрации измерим её на модели

Посмотрим разницу во времени между сигналами Serv.speed и Meas.serv.speed. Это два разных значения скорости вращения выходного вала в градусах в секунду. Первая величина реальная, снятая непосредственно с вала, а вторая оценочная, после фильтрации дифференциала сигнала позиции вала.

При коэффициенте экспоненциального фильтра (на модели обозначен как Speed exp.filter1) равного 1-1/2048 (0.99951) получаем задержку 83 мс.

При коэффициенте экспоненциального фильтра равного 1-1/256 (0.9961) получаем задержку 16 мс.
Задержки существенные. Они ограничивают такт регулятора скорости величиной не более 10. 50 Гц.
Как видно, простая комбинация FIR и IIR фильтров не слишком хороший способ получить чистое значение скорости. Но пока останавливаемся на этом.
К вопросу о применении магнитных сенсоров вместо серво-потенциометра
Можно слышать мнение о лучших свойствах магнитных сенсоров по сравнению с серво-потенциометром. Был проведён эксперимент с GMR сенсорами угла поворота TLI5012B.
Была изготовлена отладочная плата с этим сенсором, написан софт для обмена с FreeMaster. Непосредственно над сенсором закрепили диаметрально поляризованный магнит. Магнит повернут так чтобы сенсор показывал угол близкий к нулю. И были проведены замеры показаний при смене ориентации платы относительно магнитного поля земли

Вот результат изменения показаний сенсора при повороте платы в поле земли:

Как видно присутствие рядом мощного магнита не спасло сенсор от чувствительности к полю земли. Изменение показаний достигают 10%.
Шум серво-потенциометра достигает 5 сэмплов на любом угле поворота при 12-битном АЦП. На середине диапазона это будет равно 5/2048 = 0.24%. У GMR сенсора TLI5012 шум составляет 0.025 %
Однако деформации платы с сенсором на доли миллиметра приводили к искажениям показаний на 0.06 %. Сенсор очень чувствителен к изменению расстояния до магнита и очень чувствителен к вибрациям.
Изменение дистанции между осями сенсора и магнита на 1 мм приводит к изменению значения угла на 1 градус.
Появление на расстоянии 50 см магнита аналогичного приложенного к сенсору также вызывает флуктуации приблизительно в 1 градус.
Всё говорит о том, что в целом шумы от магнитного сенсора будут незначительно меньше шумов от серво-потенциометра, но при этом понадобиться гораздо тщательней продумывать механическое крепление сенсора.
Разработка приложений для MC50
Программный фреймворк серво контроллера MC50 выполнен на базе Azure RTOS. На данном этапе он содержит в себе практически весь состав промежуточного программного обеспечения Azure RTOS с драйверами периферии. Поверх слоя промежуточного ПО находится несколько прикладных задач: управления мотором, управления микросхемой 3-фазного драйвера мотора, измерения, GUI, управление выходами и другие.
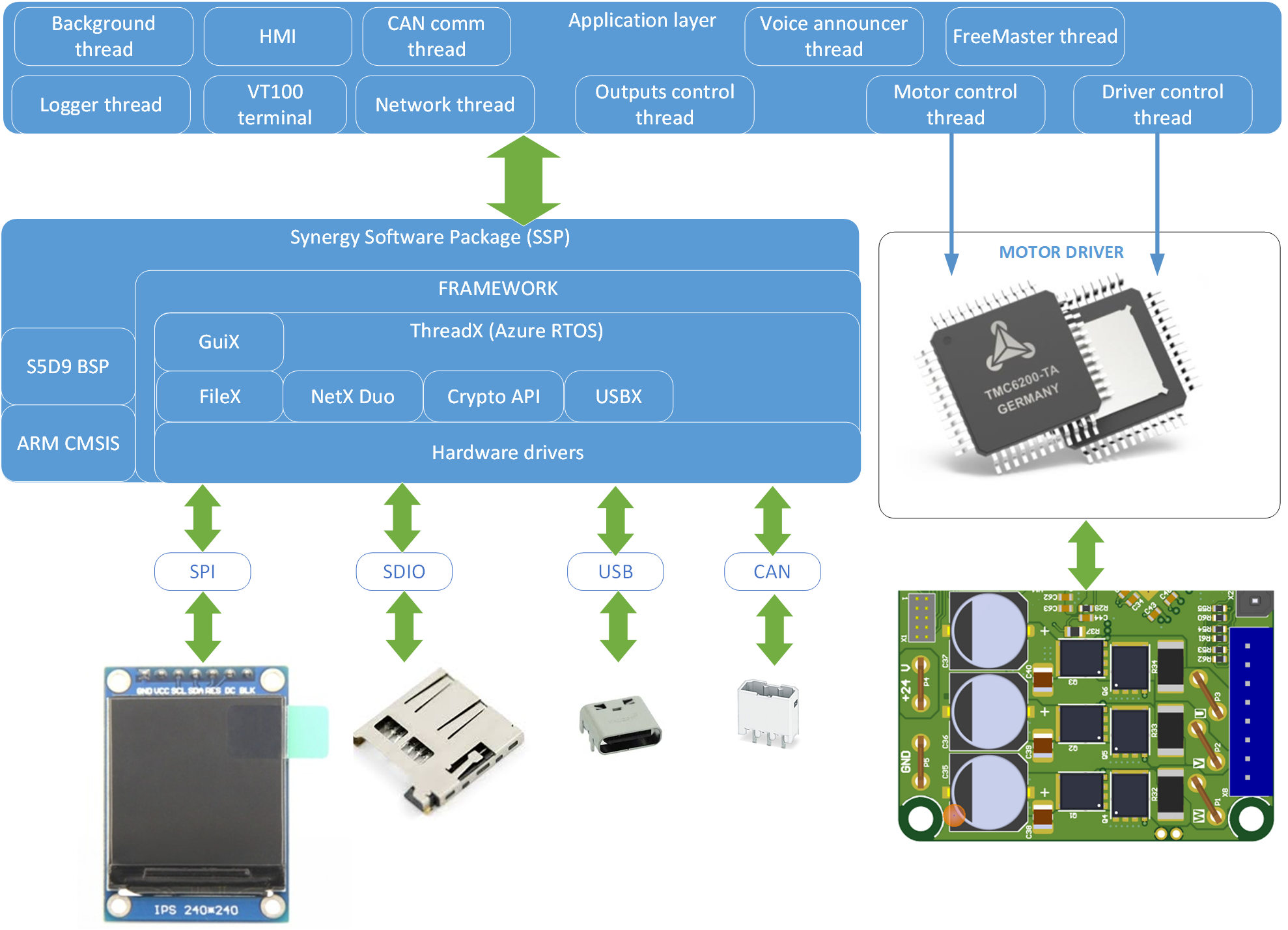
В текущей версии софта реализовано управление рычагом на заданные углы с заданной скоростью. С помощью ручного энкодера производится калибровка углов, настройка скорости поворота и номер узла на шине CAN. Все остальные параметры можно настроить через терминал VT100 через USB VCOM или через интернет, как это было показано в предыдущих статьях. Команды сервоприводу могут подаваться с ручного энкодера, по шине CAN и через протокол FreeMaster через USB.
Обо Всём. Подключения схема сервопривода
Подключение сервопривода к микроконтроллеру — Как подключить — AVR project.ru

Сервопривод, как и шаговый двигатель, является элементом точной кинематики, позволяющий достигать точное позиционирование механизмов. Но в отличии от шагового двигателя, сервопривод имеет обратную связь, позволяющую в любой момент отследить точный угол поворота вала. В качестве источника обратной связи могут быть использованы различные типы энкодеров и потенциометры.
В статье рассмотрим подключение и работу с младшими представителями сервоприводов — т.н. сервомашинками — горячо любимыми среди роботостроителей и моделистов.
Сервомашинка состоит из корпуса, в котором заключен небольшой коллекторный электромотор, редуктор и управляющая электроника.

В качестве обратной связи применяются потенциометры. Поэтому эти сервы имеют ограничения по углу поворота вала вокруг оси. Так, в приобретенных мной сервах Futaba S3003, угол поворота выходного вала составляет 225°.
Технические характеристики Futaba S3003
| Параметр | Напряжение питания, В | |
| 4,8 | 6,0 | |
| Усилие на валу | 3,2 кг/см | 4,1 кг/см |
| Скорость позиционирования | 0,23 sec/60° | 0,19 sec/60° |
| Размер, Д х Ш х В | 41мм х 20мм х 36мм | |
| Масса, г | 37 | |
Потенциометр обратной связи посажен прямо на выходной вал, благодаря ему блок управления сервомашинки отслеживает точное положение вала: сопротивление потенциометра изменяется пропорционально углу поворота. Считав сопротивление, блок управления сравнивает это значение с тем, которое должно быть при заданном положении вала. Если эти значения отличаются, блок управления дает команду двигателю повернуть вал в заданном направлении, уменьшая разницу значений. Достигнув положения вала, когда значение с потенциометра совпадает с заданным значением, двигатель останавливается. Считывание значения с потенциометра и его сравнение происходит с большой частотой, поэтому выходной вал будет стремиться занять заданное положение при изменении внешней нагрузки.
Конструкция сервомашинки выполнена таким образом, что крутящий момент от двигателя к выходному валу передается через редуктор с большим передаточным числом, поэтому при малых размерах и энергозатратах, сервомашинки могут обеспечивать большую тягу.
В качестве управляющего сигнала служит импульсный сигнал с периодом 20 мс и с длительностью от 0,8 до 2,2 мс. Это некий стандарт управления сервомашинок. Чем длинее пришел импульс, тем на больший угол повернется вал сервомашинки. Для разгона сервомашинки период следования импульсов можно уменьшить до 10 мс.

Управляющий сигнал подается на серву по сигнальному проводу S. В моей сервомашинке он белый, в некоторых моделях — желтый. Помимо сигнального провода из сервомашинки выходят два провода — линии питания — земля (черный) и питание (красный)

Как видно управлять сервой достаточно просто — достаточно гнать импульсный сигнал с нужной частотой и скважностью. Этот сигнал можно генериовать ШИМ, или написать свою функцию обработки прерывания по таймеру. Но в Bascom-AVR уже есть встроенная команда для управления сервомашинками — Servo. Ее и рассмотрим.
Для начала необходимо сконфигурировать подключение сервомашинок:
Config Servos = X , Servo1 = Portb.0 , Servo2 = Portb.1 , Reload = Var
Servos = X ; указывается количество подключаемых сервомашинок, возможно подключение до 14 серв.
Servo1 = Portb.0 ; указывается порт подключения первой сервы
Servo2 = Portb.1 ; указывается порт подключения второй сервы
Reload = Var ; здесь Var время в микросекундах, которое проходит между прерываниями от таймера.
По умолчанию для организации прерываний используется Timer0, поэтому использовать его в своих целях уже не получиться. Bascom-AVR позволяет перебросить обслуживание прерываний на любой другой таймер, например чтобы освободить Timer0 и задествовать Timer1 достаточно указать это в строке конфигурации:
Config Servos = 2, Servo1 = Portb.0 , Servo2 = Portb.1 , Reload = 10 , Timer = Timer1
После того как все сконфигурировали остается только рулить нашей сервомашинкой. Это делается следующей командой
а — порядковый номер сервомашинки
F — переменная, значение которой задает угол поворота вала сервы
Тестовый код целиком:
$regfile = «m8def.dat» ‘микроконтроллер ATmega8$crystal = 8000000 ‘частота работы 8МГц’конфигурируем порты для подключения сервоприводовConfig Portb.0 = OutputConfig Portb.1 = Output’настраиваем подключения двух сервомашинокConfig Servos = 2 , Servo1 = Portb.0 , Servo2 = Portb.1 , Reload = 15Dim F As Byte ‘переменная для первой сервыDim S As Byte ‘переменная для второй сервы’разрешаем прерыванияEnable InterruptsF = 15 ‘значением переменной задается угол поворота вала сервомашинкиS = 70DoServo(1) = FServo(2) = SLoopEnd
Схему подключения не привожу, думаю один сигнальный провод проблем не вызовет 😉 Его можно подключать к порту микроконтроллера напрямую, а можно через резистор сопротивлением пару сотен ом — для перестраховки.
Меняя значения перемменных F и S можем менять угол поворота первой и второй сервомашинок соответственно. Чем меньше значение параметра Reload, тем шустрее наши сервомашинки будут поворачиваться на нужный угол.
Для своих серв подобрал рабочий диапазон значений Servo(a), в которых вал может вращаться. Крайнее положения вал занимает при значении 0 и 150, соответственно при значении 75 вал занимает промежуточное положение.



Servo(a) =0 Servo(a) =75 Servo(a) =150
Сервопривод коллекторный. Выбор и правила подключения.
Данный сервопривод иногда обзывают: Электроприводом, сервомотором, термоприводом и т. д.
Его официальное название электротермический сервопривод ( Проще: Термопривод ). Сервомоторами называют приводы с электромагнитным двигателемСуществуют сервоприводы для трехходовых клапанов.
Такой сервопривод (термопривод) можно использовать как для теплого пола, так и для радиаторного отопления. Как для коллектора, так и для термостатического клапана (вентиля). В данном случае мы рассмотрим подключение для теплого пола и подключение радиаторного регулирования.
В этой статье Вы поймете правила подключения такого сервопривода и наконец, закроете все вопросы по автоматическому регулированию отопления.
Данные сервоприводы бывают нормально открытые и нормально закрытые.
Нормально открытый — Открытый клапан по умолчанию. То есть когда на сервопривод не идет сигнал (напряжение), он находится в положение Открытый клапан. В данном случае при отсутствии напряжения теплоноситель проходит через открытый клапан.Нормально закрытый — Закрытый клапан по умолчанию. То есть когда на сервопривод не идет сигнал (напряжение), он находится в положение Закрытый клапан. В данном случае при отсутствии напряжения теплоноситель не проходит через закрытый клапан.Универсальные, переключающиеся термоприводы — такие термоприводы можно переключать на одно из двух положений: Нормально открытый и нормально закрытый.Вид сервоприводов может иметь различные формы:
Когда встает вопрос о выборе варианта — открытого или закрытого типа, то нужно понимать следующее:Если клапан большее время находится в открытом положении, то выбирается режим нормально открытый.Если клапан большее время находится в закрытом положении, то выбирается режим нормально закрытый.В условиях суровой зимы выбирается вариант нормально открытый. В частности в России. В теплых краях можно выбирать нормально закрытый. Впрочем, все зависит от множества факторов. Самый распространенный вариант сервоприводов — это нормально открытый. К тому же, когда сервопривод выходит из строя, то нет риска, заморозить помещение от холода.Сервоприводы по напряжению бывают на 220 вольт, но бывают и на другое напряжение, например, 24 вольт. Также не исключено, что сервоприводы могут принимать постоянный ток или переменный ток. В большинстве случаев это переменный ток 50 Гц.Чтобы сервопривод начал закрывать или открывать клапан, ему нужен сигнал в виде напряжения. Обычный сигнал сервоприводу — это обычное питание, которое указывается в паспорте сервопривода. (220в/24в).
Как работает сервопривод?
Рассмотрим такой термопривод. Производитель: Oventrop.Внутри имеется такой механизм:
Принцип действия сервопривода
Принцип действия привода основан на расширении жидкости (толуола) в сильфоне за счет прохождения электрического тока через нихромовый нагревательный элемент.В механизме сервопривода имеется пружинный механизм и емкость, в которой умещена специальная жидкость, которая под действием температуры расширяется и давит на шток. Шток, выдвигаясь, давит на шток термоклапана и клапан закрывается. Под действием напряжения происходит прогрев жидкости, и жидкость расширяется. То есть этот сервопривод не имеет электромагнитного мотора. Использование силы взято от расширяющейся жидкости под действием температуры, поэтому данный сервопривод обзывают термоприводом. Так как сила движения происходит от расширения жидкости при его нагреве.Поэтому когда подается напряжение на сервопривод, то привод закрывает клапан не мгновенно, а по истечению некоторого времени, на которое уходит прогрев жидкости. Это около 1-3 минут в зависимости от производителя.Когда в термоприводе отсутствует напряжение, то клапан приходит в исходное положение, когда достаточно для этого остынет. Остывает сервопривод намного дольше, чем нагревается. Поэтому время открывания термопривода от 5 до 15 минут.
Существуют термоприводы (сервоприводы), в которых нет жидкости для расширения. В таких сервоприводах перемещение штока достигается посредством нагрева компенсационного термоэлемента. Термоэлемент может быть похож на пластину или пружину, которая при нагреве изменяет свое положение. Такое можно наблюдать в электрических термостатах электрических плит.
Слева нагретый сервопривод, справа остывший.
Сверху у сервопривода имеется выдвигающийся механизм, он нужен для того, чтобы:Во-первых, определять посадку сервопривода в термоклапане.Во-вторых, уведомляет о режиме клапана: Вкл/Выкл.То есть если он поднят вверх — это говорит о том, что клапан закрыт. Если он опущен, то клапан открыт.Если данный механизм имеет на стандартные размеры по высоте, то следует насторожиться. Данный термопривод может не подходить к термоклапану или не правильно быть подключен. То есть размеры выдвигаемого штока не совпадают с термоклапаном.В сервоприводах стоит защита от перегрева. Там встроен механизм отключения питания.Данный сервопривод можно проверить на ощупь, если он нагрет — клапан закрыт, если он холодный — клапан открыт.
Данный сервопривод подключается на термостатический клапан коллектора или это может быть отдельный термостатический клапан как показано на изображении:
Электрическая схема сервопривода и термостата на 220 вольт.
Так же можно одним термостатом подключить 2-3 сервопривода.
По поводу тока и напряжения, описано ниже. этот текст отсюда не видать.
Вопрос в том стоит ли соблюдать фазу ноль? Если Вы даже перепутаете фазу с нулем, данная схема все равно будет работать. Но учтите ее, когда вы будите подключать более сложные электронные устройства. В сложных устройствах могут возникать ошибки. В любом случае смотрите паспорта электрического устройства и соблюдайте Фазу и ноль. Фаза (L). Ноль (N). Земля (PE).
Существуют теромприводы с плавной регулировкой! Для таких теромприводов нужен специальный сигнал! Такой сервопривод может называться: Термоэлектронный привод постоянного тока. Обычно он с напряжением 24 Вольт. Управляющий сигнал от 0 до 10 Вольт. То есть для него идет специальный электронный регулятор. Этот электронный регулятор в зависимости от специального электронного температурного датчика, подает необходимое напряжение термоэлектронному приводу. В зависимости от напряжения термоэлектронный привод получает точное положение штока, который давит на термостатический клапан. Данный термоэлектронный привод подойдет там, где необходимо пропускать теплоноситель дозированно, для плавной регулировки. Для теплого водяного пола он не нужен!
Поэтому когда будите покупать или заказывать сервопривод, убедитесь в том, что бы Вы случайно не приобрели термоэлектронный сервопривод. Так как такой привод должен использоваться совместно с электронным регулятором.Между сервоприводом и термостатом может быть подключен Коммутационный блок, который выглядит таким образом:
Коммутационный блокКоммутационные блоки для коммутации термостатов и сервоприводов называют по-разному: Коммуникатор зональный, коммутатор для смесительных узлов, клеммная колодка для сервоприводов и насосной логикой, просто коммуникатор и так далее.Данный коммуникатор служит для передачи управляющих сигналов (вкл/выкл) от комнатных термостатов на сервоприводы термостатических клапанов, управляющих подачей теплоносителя по контурам.При отсутствии запроса на подачу теплоносителя во все присоединительные контура, реле коммутатора подает команду на отключение циркуляционного насоса смесительного узла.Коммутаторы, также подразделяются по напряжению и существуют коммутаторы на 220 вольт.
То есть данные коммутаторы могут быть полезны для того чтобы отключить насос, когда все контура закрыты. Существуют коммутаторы с различной программной средой, которые могут быть не менее полезным функционалом для систем регулирования, о которых Вы сможете узнать у производителя.
Некоторые коммутаторы бывают с радиоэлектронным сигналом. Продаются в сборе с термостатами, которые сообщают информацию по средствам радиосигнала. Такие термостаты можно поставить в любое место на стене без прокладки кабеля. В общем, по функциям они очень разннобразны. Электрическая схема сервопривода, термостата и коммутатора
Для новичков я рекомендую купить сервопривод на 220 вольт с переменным питанием 50 Гц. Для тех, кто живет в России. То есть такой сервопривод можно спокойно подключить к сети питания 220 вольт. В других странах могут быть изменены напряжения сети. При подключении к сети, нормально открытый клапан будет закрываться.Также рекомендую ознакомиться с мощностью термостатов. Чтобы напряжение и ток в термостате не превышал заданные производителем. Для примера скажу, чтобы не было проблем с перегрузками, берите термостат с напряжением 220 Вольт и с током до 10 Ампер. А сервоприводы на 220 вольт имеют ток около 0,3 Ампер. Так что перегрузки по токам с таким термостатом не должны быть. Соответственно электропровод по сечению может быть 1-1,5 мм2.Электропровод, ведущий от термостата до сервопривода, лучше сделать трех жильным, так как рабочие контакты термостата, имеют три соединения. Общий, рабочий и реверсивный сигнал. На будущее вдруг Вам понадобиться обратный сигнал (противоположная команда) от термостата.Если Вы плохо разбираетесь в электричестве, то коммутаторы вообще не рекомендую брать. Во-первых, они дорогие. Во-вторых, функцию по отключению насоса можно пережить. Впрочем, Вам решать.Когда существует вероятность того, что все контура закроются, и насос будет работать на нулевой расход, в этом случае обязательно устанавливают перепускной клапан, который дает расход, когда все контура закрыты.Перепускной клапан. Назначение и настройка.
Комнатный термостат. Комнатные регуляторы температуры.
Электрические комнатные терморегуляторы называют термостатом.
Терморегулятор — это электрический датчик температуры, который посредствам выбранной температуры дает сигнал сервоприводу на закрытие или открытие клапана. В терморегуляторе присутствует возможность выбрать комнатную температуру или механическим способом (рукоятка) или электронным способом (кнопка).Термостат обладает одним или двумя датчиками температуры. Основной датчик температуры встроен вовнутрь устройства. Он служит для получения температуры воздуха. Другой считается выносным и называется выносным погружным зондом. Выносной зонд нужен для того, чтобы измерять температуру поверхности теплого пола. Его нужно монтировать вовнутрь теплого водяного пола, то есть в бетонное основание теплого пола. Выносной датчик служит для измерения температуры поверхности пола. Данный зонд нужно устанавливать там, где основание пола будет всегда открыто. Также не допускается зонд устанавливать возле окон и дверей где возможен сквозняк. Зонд нужно установить между подающей и обратной трубой. Высота датчика (зонда) должна быть не ниже середины по высоте бетонной стяжки.Датчик для определения температуры воздуха, должен находиться от пола на расстоянии 0,8-1,5 метра. Чем ближе датчик к полу, тем больше он чувствует тепло. Чем дальше, тем меньше он чувствует тепла. Это говорит о том, что если датчик будет дальше от пола, то регулятор температуры будет выставлен больше. Если ближе к полу, то наоборот.Устанавливается датчик только на внутренних стенах. Внутренняя стена является той стеной, за которой находиться отапливаемое помещение. Наружной стеной — является стена, за которой нет помещений. Наружная стена является холодной. Датчик, установленный на наружной стене, будет обманывать и давать результаты того, что в помещение холодно.Нельзя заслонять стену (шкафами, полками, столом, креслом, диваном) где стоит датчик температуры воздуха. Данная стена должна быть свободна для естественной циркуляции воздуха через датчик температуры. Для этого подходит стена возле входной двери. Если дверь постоянно открыта, то датчик от двери нужно установить дальше от двери на расстояние примерно 1 м. Возле датчика температуры воздуха нельзя ставить оборудование, которые выделяет тепло.Необходимо убедиться, что бы возле датчика температуры воздуха не было каких-либо сквозняков, например вентиляции. Теоретически, идеальное место для датчика температуры воздуха, это центр отапливаемого помещения, как по ширине и длине, так и по высоте.Термостат, обладающий двумя датчиками, может контролировать сразу два параметра: температуру воздуха и температуру пола. В таком термостате задаются пороги отключения для температуры воздуха и температуры пола. Если превысит порог температуры любого из двух датчиков, то идет отключение сервопривода.
Программируемые термостаты
Такие термостаты называют хронотермостатами. В них можно задавать работу сервоприводов по времени и (или) по дням.Термостаты или коммутаторы с беспроводным датчиком.Эра новых технологий не стоит на месте и с каждым десятилетием появляются новые изобретения. Скажу лишь то, что такие термостаты существуют. Панель управления термостатов может быть установлена в любом месте, а вот термодатчик определяющий, температуру может находиться там, где это необходимо. Термодатчик по средствам радиосигнала посылает команду термостату.
что это такое? Устройство, подключение, принцип работы, назначение

Несмотря на то, что автоматизированные системы управления вошли в наш быт, далеко не всем известно про сервопривод. Что это такое? Он представляет собой систему, реализующую высокоточные динамичные процессы. Устройство состоит из двигателя, датчика и блока управления, обеспечивающих отработку требуемых скорости, позиции и момента.К сервоприводам относятся различные усилители и регуляторы, но термин больше применяется в автоматических системах при обозначении электропривода с отрицательной обратной связью по положению. Основой является корректировка работы электродвигателя при подаче управляющего сигнала.
Как устроен сервопривод
Что это такое, легче понять, если рассмотреть конструкцию и работу устройства. Электромеханический узел сервопривода размещается в одном корпусе. Его характеристиками являются конструкция, рабочее напряжение, частота и крутящий момент. По показаниям датчика от контроллера или микросхемы поступает сигнал на корректировку работы серводвигателя.Простейшее устройство представляет собой электродвигатель постоянного тока, схему управления и потенциометр. Конструкция предусматривает наличие редуктора, чтобы получить заданную скорость перемещения выходного вала.
Схема управления

Подключение сервопривода можно производить с помощью простой схемы с таймером NE555 в режиме генератора импульсов.Положение вала двигателя определяется шириной импульса, которая устанавливается переменным резистором R1. Сигналы должны подаваться генератором непрерывно, например каждые 20 мсек. При поступлении команды (перемещение движка резистора) выходной вал редуктора поворачивается и устанавливается в определенное положение. При внешнем воздействии он будет сопротивляться, пытаясь оставаться на месте.
Механическое регулирование системы отопления
Сервопривод — что это такое? Это хорошо понятно по его работе в системе теплого пола как приспособления, регулирующего поток теплоносителя. Если это делать вручную, придется непрерывно крутить вентили на коллекторах, поскольку расход горячей воды, подаваемой в обогревающие контуры, является переменной величиной.Для автоматического регулирования систем теплого пола применяются разные устройства. Простейшим является термоголовка, устанавливаемая на регулирующий клапан. Она состоит из ручки механической настройки, пружинного механизма и сильфона, соединенного с толкателем. При повышении температуры внутри сильфона нагревается толуол, который при этом расширяется и давит на шток клапана, закрывая его. Поток теплоносителя перекрывается, и он начинает остывать в отопительном контуре. При охлаждении до заданного уровня сильфон снова открывает клапан, и новая порция горячей воды поступает в систему.Механические регуляторы устанавливаются на каждый контур теплого пола и настраиваются вручную, после чего температура автоматически поддерживается постоянной.
Электрический сервопривод для отопления
Более совершенным устройством является электрический сервопривод для отопления или теплого пола. Он включает систему взаимосвязанных механизмов, обеспечивающих поддерживание температуры воздуха в помещении.
 Сервопривод для отопления работает вместе с термостатом, который монтируется на стену. Кран с электроприводом устанавливается на подающей трубе, перед коллектором водяного теплого пола. Затем производится подключение, подача питания 220 В и установка на терморегуляторе заданного режима. Система снабжается двумя датчиками: один — в полу, а другой — в комнате. Они передают команды на термостат, который управляет сервоприводом, соединенным с краном. Точность регулирования будет выше, если установить еще прибор на улице, поскольку климатические условия постоянно меняются и влияют на температуру в помещениях.Сервопривод управляет двух- или трехходовым клапаном. Первый изменяет температуру теплоносителя в системе отопления. Трехходовой клапан с сервоприводом поддерживает температуру постоянной, но изменяет расход горячей воды, подаваемой в контуры. Од содержит 2 входа для горячей жидкости (подающий трубопровод) и холодной (обратка). Выход всего один, через него подается смесь с заданной температурой. Клапан обеспечивает смешивание потоков, регулируя таким путем подачу тепла в коллекторы. Если один из входов открывается, то другой начинает прикрываться. При этом расход на выходе остается постоянным.
Сервопривод для отопления работает вместе с термостатом, который монтируется на стену. Кран с электроприводом устанавливается на подающей трубе, перед коллектором водяного теплого пола. Затем производится подключение, подача питания 220 В и установка на терморегуляторе заданного режима. Система снабжается двумя датчиками: один — в полу, а другой — в комнате. Они передают команды на термостат, который управляет сервоприводом, соединенным с краном. Точность регулирования будет выше, если установить еще прибор на улице, поскольку климатические условия постоянно меняются и влияют на температуру в помещениях.Сервопривод управляет двух- или трехходовым клапаном. Первый изменяет температуру теплоносителя в системе отопления. Трехходовой клапан с сервоприводом поддерживает температуру постоянной, но изменяет расход горячей воды, подаваемой в контуры. Од содержит 2 входа для горячей жидкости (подающий трубопровод) и холодной (обратка). Выход всего один, через него подается смесь с заданной температурой. Клапан обеспечивает смешивание потоков, регулируя таким путем подачу тепла в коллекторы. Если один из входов открывается, то другой начинает прикрываться. При этом расход на выходе остается постоянным.
Сервопривод крышки багажника
Современные автомобили большей частью выпускаются с автоматическим открыванием и закрыванием багажника. Для этого требуется установка сервопривода. Производители применяют 2 способа, чтобы обеспечить авто подобной опцией. Надежным вариантом является пневмопривод, но он стоит дороже. Электропривод управляется несколькими способами на выбор:
-
с пульта;кнопка на дверной панели водителя;ручка на крышке багажника.
Ручное открывание не всегда удобное, особенно зимой, когда замок может замерзнуть. Сервопривод багажника совмещается с замком, что дополнительно защищает авто от несанкционированного проникновения.Устройства применяются на иномарках, но при желании их можно установить на отечественных моделях. Предпочтительно использовать привод с электродвигателем. Есть еще устройства с магнитными пластинами, но они сложней и применяются реже.Самыми дешевыми являются электроприборы, предназначенные только для открывания. Можно подобрать привод багажника, состоящий из электродвигателя с инерционным механизмом, отключающийся при возникновении препятствия перемещению. Дорогие модели состоят из устройства подъема и опускания крышки, доводчика запорного механизма, контроллера и датчиков.Установка и настройка сервопривода крышки багажника производятся на заводе, но простые устройства могут быть установлены своими руками.
Есть еще устройства с магнитными пластинами, но они сложней и применяются реже.Самыми дешевыми являются электроприборы, предназначенные только для открывания. Можно подобрать привод багажника, состоящий из электродвигателя с инерционным механизмом, отключающийся при возникновении препятствия перемещению. Дорогие модели состоят из устройства подъема и опускания крышки, доводчика запорного механизма, контроллера и датчиков.Установка и настройка сервопривода крышки багажника производятся на заводе, но простые устройства могут быть установлены своими руками.
Характеристики сервоприводов
-
Питание. Подача напряжения производится по трем проводам. По белому передают импульс, через красный — рабочее напряжение, черный или коричневый является нейтральным.Размеры: большие, стандартные и микроустройства.Скорость. От нее зависит, за какой промежуток времени вал повернется на угол 600. Недорогие устройства обладают скоростью 0,22 сек. Если требуется высокое быстродействие, она составит 0,06 сек.Величина момента. Параметр является приоритетным, поскольку при малом вращающем моменте управление затрудняется.
Как управлять цифровым сервоприводом?

Приводы подключаются к программируемым контроллерам, среди которых хорошо известен Arduino. Подключение к его плате производится тремя проводами. По двум подается питающее напряжение, а по третьему — управляющий сигнал.Инструкция сервопривода с цифровым управлением предусматривает наличие в контроллере простой программы, позволяющей считывать с потенциометра показания и переводить их в число. Затем оно преобразуется в команду передачи на поворот вала сервопривода в заданное положение. Программа записывается на диске, а затем передается на контроллер.
Заключение
Мы подробно рассмотрели сервопривод. Что это такое, станет понятным, когда потребуется автоматизация различных процессов, где требуется поворачивать и удерживать в заданном положении вал электродвигателя. Устройства выпускаются аналоговые и цифровые. Последние нашли более широкое применение благодаря высокому уровню разрешения, большой мощности и точности позиционирования.
Руководство
По воздуху или под землей: как подвести электричество к загородному дому? Каждый дачник при благоустройстве загородного дома сталкивается с вопросом подвода электричества: вести по воздуху… Подробнее » Как развести электрику по участку
Как размагнитить постоянный магнит
- автор: admin
- 27.07.2023
Как размагнитить постоянный магнит? 3) Поместить в сильное переменное магнитное поле (50 герц вполне подойдёт) и постепенно это поле уменьшать дло нуля. Такие устройства даже… Подробнее » Как размагнитить постоянный магнит
Как различается ээо по длительности импульса
- автор: admin
- 27.07.2023
Параметры режима электроэрозионной обработки и основы их выбора Режимом электроэрозионной обработки называют совокупность численных значений регулируемых (устанавливаемых при наладке станка) параметров процесса, которые определяют технико-экономические… Подробнее » Как различается ээо по длительности импульса
Как разбирается фен ляйстер
- автор: admin
- 27.07.2023
Архив рубрики: Ремонт оборудования Замена нагревательного элемента в ручных сварочных фенах Здравствуйте. Часто случается, что ручной сварочный фен перестал греть проходящий через него воздух, это… Подробнее » Как разбирается фен ляйстер
Как разгрузить регулятор и подключить сервоприводы
- автор: admin
- 27.07.2023
Как разгрузить регулятор и подключить сервоприводы Сервопривод коллекторный. Выбор и правила подключения. Данный сервопривод иногда обзывают: Электроприводом, сервомотором, термоприводом и т. д. Его официальное название… Подробнее » Как разгрузить регулятор и подключить сервоприводы