Лекция № 4 Полосовые и заграждающие фильтры
Полосно-пропускающий фильтр — фильтр, который пропускает частоты, находящиеся в некоторой полосе частот.
Полосовой фильтр — линейная система и может быть представлен в виде последовательности, состоящей из фильтра нижних частот и фильтра верхних частот.
Идеальные полосовые фильтры характеризуются двумя характеристиками

нижняя частота среза ;

верхняя частота среза .
В свою очередь, реализация полосового фильтра характеризуется шестью характеристиками

-нижняя граница частоты пропускания ;

-верхняя граница частоты пропускания .

-нижняя граница частоты задержания ;

-верхняя граница частоты задержания ;

-максимальное подавление в полосе пропускания ;

-минимальное подавление в полосе подавления .
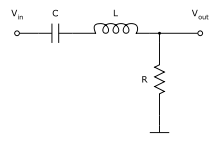
Примером реализации такого фильтра может служить колебательный контур (цепь из последовательно соединенных резистора, конденсатора и индуктивности).
Рассмотрим совокупность низкочастотного (НФ) и высокочастотного (ВФ) фильтров, которые образуют полосовой фильтр (рис. 5.5). Пусть зоны пропускания частот имеют вид (рис. 5.6).
В этомслучае зона частот от в до н будетпроходить на выход, а остальные частоты будут гаситься.
Таким образом, если каскадно включить низкочастотный ивысокочастотный фильтры и обеспечить условие < , то такая совокупность фильтров позволит сформировать полосовой фильтр.
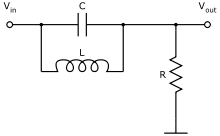
Рассмотрим другую совокупность низкочастотного и высокочастотного фильтров, которые образуют заграждающий фильтр (рис. 5.7). Если поменять условие > и фильтры включить параллельно, то совокупный фильтр будет являться заграждающим.
Полосно-заграждающий фильтр (проф. жаргон — режекторный фильтр) — электронный или любой другой фильтр, не пропускающийколебания некоторой определённой полосы частот, и пропускающий колебания с частотами, выходящими за пределы этой полосы.Эта полоса подавления характеризуется шириной BW и расположена приблизительно вокруг центральной частоты ω0 (рад/с), или fо=ω0/2•3,14 (Гц).Для реальной амплитудно-частотной характеристики частоты ωL и ωU представляют собой нижнюю и верхнюю частоты среза. Заграждающий фильтр, предназначенный для подавления одной определённой частоты, называется узкополосным заграждающим фильтром илифильтром-пробкой (англ. notch filter).
Лекция №5 Переходные процессы в rl-цепях
Рассмотрим переходные процессы в RL-цепи на примере схемы, изображенной на рис. 4.1,а. Из рисунка видно, что переходные процессы в цепи будут возникать в моменты установки ключа К в положения 1 или 2.
При установке ключа в положение 1 происходит подключение к RL-цепи источника входного воздействия u(t) и начинается переходной процесс при нулевых начальных условиях. При установке ключа в положение 2 происходит отключение входного воздействия от цепи и замыкание индуктивностиL на резистор R и начинается переходной процесс при ненулевых начальных условиях.
Переходной процесс в RL-цепи при нулевых начальных условиях. Установим ключ К в положение 1 (рис. 4.1,а). При этом в цепи возникает ток i, который создает падения напряжений на R и L.
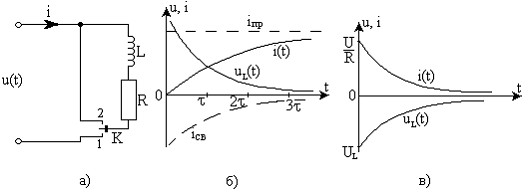
Рис. 4.1. RL-цепь (а) и переходные процессы в ней при подключении входного воздействия (б) и при отключеии входного воздействия(в).
Согласно второго закона Кирхгофа приложенное напряжение u(t) уравновешивается падениями напряжений на R и L, т.е.
u(t)=uR + uL = iR + Ldi/dt. (4.1)
Решение уравнения (4.1) можно записать в виде
где iсв – свободная составляющая тока, iпр – принужденная составляющая тока, обусловленная действием u(t).
Для определения свободной составляющей тока уравнение (4.1) необходимо приравнять к нулю, тогда будем иметь.
iсвR + Ldiсв/dt = 0. (4.3)
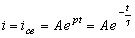
Выражение (4.3) является однородным дифференциальным уравнением, общее решение которого имеет вид
где А – постоянная интегрирования; р – корень характеристического уравнения, составленного из (4.3). R + pL = 0, откуда p = -R/L = -1/τ , тогда свободная составляющая тока (4.4) будет равна
где τ = L/R [с] –постоянная времени RL-цепи.
Принужденную составляющую iпр найдем полагая, что u(t) = U = const, тогда в установившемся режиме iпр = U/R. Учитывая последнее выражение и (4.5) перепишем (4.2) в форме
До подключения к цепи входного напряжения ток в цепи был равен нулю, тогда на основании первого закона коммутации (4.6) будет иметь вид
Отсюда находим постоянную интегрирования A = -U/R. Подставляя значение постоянной интегрирования в (4.6) находим закон изменения тока в RL-цепи при подключении к ней U = const
Учитывая (4.7) находим закон изменения напряжения на индуктивности
uL = Ldi/dt = U ℮-t/τ. (4.8)
Графики зависимости i(t) и uL(t) изображены на рис. 4.1,б. Из рисунков и выражений (4.7) и (4.8) следует, что в момент подключения к индуктивности источника постоянного напряжения ток в цепи равен нулю, а напряжение на индуктивности достигает максимального значенияuL = U, т.е. индуктивность эквивалентна разрыву цепи.
С увеличением времени ток в цепи увеличивается, а напряжение uL уменьшается по экспоненциальному закону. При t = ∞ ток в цепи достигает максимального значения, а uL = 0, т.е. индуктивность эквивалентна короткозамкнутому участку цепи.
Из выражений (4.7) и (4.8) видно, что длительность переходного процесса зависит от постоянной времени цепи τ. Чем больше постоянная времени цепи τ, тем медленнее затухает переходной процесс. При t = τ напряжение UL уменьшается в е раз. На практике принято считать, что переходной процесс заканчивается через время t = 3τ, т.к. при этом ток (4.7) достигает 95% от своего установившегося значения.
Рассмотрим случай, когда на вход RL-цепи (рис. 4.1,а) подключается гармоническое колебание. Для этого случая принужденная составляющая тока будет

, (4.9)
где  ;
;  .
.
Свободная составляющая тока определятся выражением (4.5).
Постоянную интегрирования А определим исходя из начальных условий, т.е. при t = 0, i = 0, тогда на основании (4.2) запишем
0 = А + Im sin(φu — φ).
Откуда А = -Im sin(φu — φ). Учитывая значение А и выражение (4.9) закон изменения тока в RL-цепи будет иметь вид

. (4.10)

Напряжение на индуктивности определяется уравнением , т.е.

, (4.11)
Из (4.10) видно, что переходной процесс в RL-цепи при подключении ее к гармоническому колебанию, будет протекать по-разному в зависимости от момента включения входного воздействия. Если цепь будет подключена к источнику в момент, когдаφu = φ ± π/2, то в момент включения ток imax = 2Im, т.е. появляется бросок тока. При включении цепи в момент, когда φu = φ в цепи сразу наступает установившийся режим.
Переходной процесс в RL-цепи при ненулевых начальных условиях. Пусть к моменту коммутации ключ К на рис. 4.1,а находился в положении 1 и к RL-цепи было подключено напряжение u(t) = U = const. Следовательно в цепи была запасена энергия магнитного поля WL = LI2 = L(U/R)2. Установим ключ К в положение 2. При этом от цепи будет отключено входное воздействие и индуктивность L будет замкнута на резисторе R. В цепи возникает переходной процесс, описываемый уравнением
iR + Ldi/dt = 0. (4.12)
Принужденная составляющая тока iпр= 0. Решая уравнение (4.12) с учетом (4.3) — (4.5) находим
. (4.13)
В момент коммутации при t = 0 ток в цепи был i = U/R, поэтому из (4.13) имеем A = U/R. Подставляя полученное значение А в (4.13) будем иметь следующее выражение, описывающее изменение тока в RL-цепи после отключения входного воздействия

. (4.14)
Напряжение на индуктивности в переходном режиме изменяется по закону
. (4.15)
Графики изменения тока и напряжения изображены на рис. 4.1,в.
Из рисунков и выражений (4.14) и (4.15) видно, что при отключении от индуктивности входного воздействия и замыкании ее на резистор ток и напряжение стремятся к нулю. Это означает, что вся запасенная в индуктивности энергия с течением времени расходуется на тепловые потери в резисторе. Длительность переходного процесса зависит от постоянной времени цепи и переходной процесс заканчивается через времяt ≈ 3τ.
3.5. Полосовые фильтры
В рассмотренных выше способах формирования однополосного сигнала широко используются полосовые фильтры, которые обеспечивают выделение колебаний определенных частот и подавление колебаний вне полосы пропускания фильтра. В зависимости от способа формирования, а также требований к системе связи в целом к фильтрам предъявляются различные электрические и конструктивные требования.
К основным электрическим показателям фильтров для систем формирования однополосного сигнала относятся полоса пропускания, полоса фильтрации, полоса подавления и величины затухания в каждой из полос. Все эти электрические свойства обычно представляются в виде частотной зависимости коэффициента передачи или затухания. На (рис. 3.9) приведена частотная характеристика фильтра, т.е. Зависимость затухания фильтра от частоты, и обозначены характерные области частотной характеристики.
Полоса пропускания на (рис. 3.9) должна соответствовать ширине спектра полезного сигнала. Затухание в полосе от до обычно составляет не более единиц децибел. Изменение затухания в полосе пропускания, определяющее амплитудные искажения пропускаемого спектра, не должно превышать долей децибела. Фильтр должен иметь достаточно крутой спад частотной характеристики в полосах фильтрации, так как от крутизны этого спада зависят избирательные свойства фильтра.
Крутизна спада частотной характеристики в полосе фильтрации обычно характеризуется производной или приближенно величиной (рис. 3.9). В полосе подавления фильтр должен иметь большое затухание, порядка 50 — 60 дБ. При недостаточном затухании возможно проникновение помех из соседних каналов.

Кроме удовлетворения отмеченных выше требований, фильтр должен обладать достаточной стабильностью параметров, механической прочностью, малым весом. В реальной аппаратуре используются фильтры типа LС, т.е. фильтры, состоящие из элементов с сосредоточенными параметрами и (катушек конденсаторов), п ьезоэлектрические и электромеханические.
Рис. 3.9 Частотная характеристика фильтра.
Фильтры типа LС имеют хорошие электрические характеристики, достаточно просты в изготовлении и находят широкое применение в схемах формирования однополосного сигнала. На частоте порядка 40 — 50 кГц они позволяют обеспечить крутизну спада частотной характеристики дБ/Гц и относительную полосу пропускания(отношение полосы пропускания к средней частоте фильтра порядка (5 ÷ 10) 10 -2 .
Пьезоэлектрические фильтры, в которых используются резонаторы из кварца,турмалина, титаната бария и других материалов, обладающих пьезоэлектрическим эффектом, позволяют обеспечить более высокие избирательные свойства по сравнению с фильтром LС. Из упомянутых материалов, в которых проявляется пьезоэффект, в фильтрах систем однополосной передачи применяется главным образом кварц.Резонаторы из кварца обладают высокой добротностью и хорошими эталонными свойствами, т. е. высокой стабильностью электрических параметров.
Применение кварцевых резонаторов в фильтрах обеспечивает получение более высокой крутизны спада частотной характеристики фильтра и относительной полосы пропускания порядка 5 ∗ 10 -4 . К недостаткам кварцевых фильтров следует отнести сложность изготовления (в частности, подгонки частоты) кварцевых резонаторов, а также сложность настройки фильтров и их высокую стоимость.
В электромеханических фильтрах используются механические колебания резонаторов, изготовленных из металлических сплавов, обладающих высокой стабильностью (например, инвара, сплава никеля с железом и т. п.).
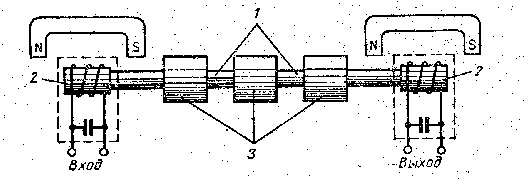
Рис. 3.10 Электромеханический полосовой фильтр:1 — связки; 2 — магнитострикционный преобразователь; 3 — резонаторы
Электромеханический фильтр представляет собой набор резонаторов цилиндрической,прямоугольной или другой формы (до 10 – 15 штук), соединенных металлическими связками, форма которых может быть также различной (рис. 3.10). В зависимости от размеров каждая пластинка-резонатор имеет вполне определенную резонансную частоту, при которой наблюдаются интенсивные механические колебания. Эти колебания через металлические стерженьки-связки передаются соседнему резонатору и, если его собственная частота близка к частоте первого резонатора, возбуждают в нем также интенсивные колебания. При соответствующем подборе отдельных резонаторов и элементов связи между ними такая система обладает свойствами полосового фильтра: она пропускает без существенного затухания механические колебания только в определенной полосе частот и создает весьма большое затухание вне этой полосы. Однако, данная система связанных резонаторов является фильтром механических колебаний, поэтому для использования ее в электрических устройствах формирования однополосного сигнала на входе и выходе фильтра устанавливаются магнитострикционные преобразователи, которые преобразуют электрические колебания в механические на входе фильтра и механические колебания в электрические на выходе последнего.
В основе действия подобного типа преобразователей лежит магнитострикционный эффект, заключающийся в изменении формы и размеров ферромагнитных тел под влиянием магнитного поля. Магнитострикционный преобразователь обычно выполняется в виде катушки, в которую помещается ферромагнитный элемент, связанный с системой механических резонаторов. Для усиления эффекта магнитострикции преобразователь располагается в поле постоянного магнита, обеспечивающего постоянное подмагничивание,Электромеханические фильтры, изготавливаемые на частоты 50 — 500 кГц, позволяют получить крутизну спада частотной характеристики порядка 0,2 — 0,3 дБ/Гц и относительную полосу более (2 ÷ 3) 10 -3 . Затухание подобных фильтров в полосе пропускания обычно не превышает единиц децибел.
Малый вес и размеры электромеханических фильтров позволяют снизить вес и габариты аппаратуры систем однополюсной передачи. К недостаткам этих фильтров можно отнести трудность их изготовления, связанную с необходимостью соблюдения высокой точности обработки элементов колебательной системы.
2.4 Полосовые фильтры

Интегрирующее и дифференцирующее звенья при воздействии на них непрерывными случайными сигналами ведут себя как, соответственно, фильтры нижних и верхних частот, АЧХ которых представлены на рис. 2.2.1 и 2.3.2. Последовательно соединив два этих фильтра, можно получить фильтр, пропускающий сигналы, лежащие в заданной полосе. Такой фильтр называют полосовым (рис. 2.4.1). Элементы R1 и C2 образуют фильтр нижних частот, а C1 и R2 – фильтр верхних частот. Коэффициент передачи полосового фильтра описывается выражением:

(2.4.1)

(2.4.2)
График АЧХ приведен на рис.2.4.2. Максимальный коэффициент усиления K() имеет место при RC = 1, резонансная частота fр равна
Фазовый сдвиг на резонансной частоте равен нулю, а коэффициент передачи Kр = 1/3.
Как следует из рисунка, уменьшение и увеличение частоты входного сигнала относительно fр вызывает уменьшение коэффициента передачи вплоть до нуля. К недостаткам такого фильтра относят малый коэффициент передачи на резонансной частоте (1/3).
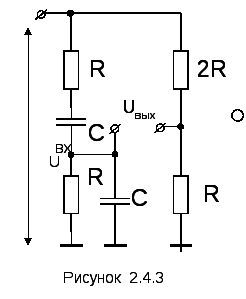
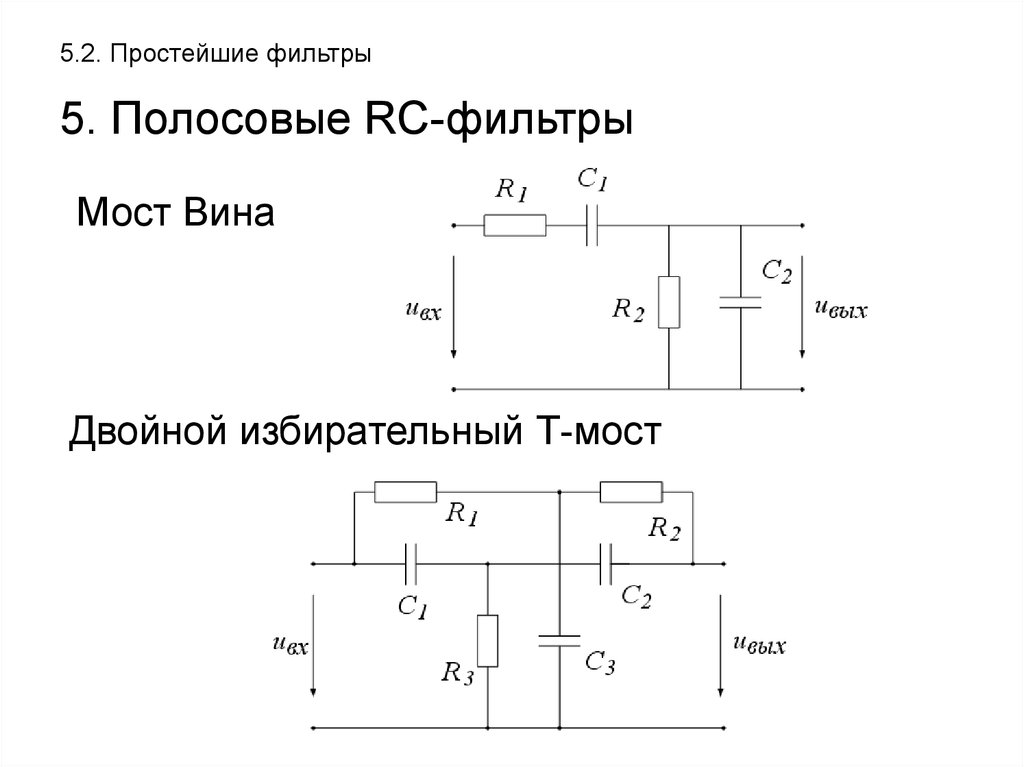
Для подавления сигналов (например, помех) в определенной частотной области применяют мост Вина, который представляет собой параллельное включение частотно-независимого делителя (рис. 2.4.3) напряжения и полосового RС-фильтра. Делитель обеспечивает частотно-независимое напряжение, равное 1/3Uвх. На выходе полосового фильтра напряжение достигает уровня 1/3Uвх только на частоте резонанса. Вследствие этого на частоте резонанса разность потенциалов между средними точками моста становится равной нулю, а АЧХ имеет минимум.
Зависимости К() и φ() от частоты имеют вид (рис. 2.4.4)

(2.4.3)

приRC≠1 (2.4.4)

Недостатком моста Вина является низкий коэффициент передачи (1/3) и отсутствие общей точки между входом и выходом, что затрудняет съем сигнала с выхода фильтра.

Этих недостатков лишен двойной Т-образный фильтр(рис. 2.4.5). Он имеет частотные характеристики, идентичные характеристикам моста Вина, однако выходное напряжение в нем снимается относительно общей точки, что дает ему преимущества в электронных схемах.
В двойном Т-образном фильтре для высоких и низких частот, существенно отличных от резонансной, Uвых = Uвх. При этом сигналы высоких частот будут полностью передаваться через два конденсатора С, а сигналы низких частот — через резисторы R.
Амплитудно- и фазочастотные характеристики двойного Т-образного моста описываются зависимостями (рис. 2.4.6):

(2.4.5)

приRC≠1 (2.4.6)

Если необходимо получить лучшие характеристики фильтров по сравнению с однозвенными, например, более быстрое уменьшение коэффициента передачи фильтра, можно включитьn фильтров нижних частот последовательно. Передаточная функция такой системы

(2.4.7)
где а1, a2, . аn-действительные положительные коэффициенты, P=p/cp — нормированная комплексная переменная. Уменьшение коэффициента передачи такого фильтра характеризуется величиной 20 дБ на каждую декаду.
Корни передаточной функции (2.4.7) являются отрицательными и действительными, что отвечает характеристикам RС-фильтров n — го порядка.
Передаточная функция фильтра нижних частот в общем виде может быть записана как

, (2.4.8)
где С1,С2. Сn — положительные действительные коэффициенты. Порядок фильтра определяется максимальной степенью переменной P. Для реализации фильтра необходимо разложить полином знаменателя на множители. Если среди корней полинома есть комплексные, то выражение (2.4.7) не может быть использовано, а его следует записать в виде произведения сомножителей второго порядка:

 (2.4.9)
(2.4.9)
где ai, bi — положительные действительные коэффициенты, причем для нечетных порядков полинома b1 равен нулю.

Такие многозвенные фильтры имеют достаточно сложные полиномиальные характеристики, для аппроксимации которых используют несколько типовых полиномов: Баттерворта, Чебышева, Бесселя. В соответствии с этими полиномами аппроксимируемые ими фильтры называются фильтрами Баттерворта, Чебышева, Бесселя.

Фильтры Баттерворта обеспечивают длинный горизонтальный участок АЧХ (рис. 2.4.7, кривая 2) в полосе пропускания и резкий спад ее за частотой среза. Переходная характеристика такого фильтра при ступенчатом входном сигнале имеет колебательный характер, причем с увеличением порядка фильтра (числа звеньев) колебания усиливаются.Фильтры Чебышева имеют более круто спадающую характеристику за частотой среза, однако в полосе пропускания она не монотонна, а имеет волнообразный характер с постоянной амплитудой колебаний. При заданном порядке фильтра более резкому спаду АЧХ за частотой среза соответствует большая неравномерность в полосе пропускания. Переходная характеристика h(t) является колебательной, причем с ростом порядка фильтра колебания увеличиваются. Колебательность h(t) фильтра Чебышева больше, чем фильтра Баттерворта. Фильтры Бесселя (кривая 1) имеют более пологий спад АЧХ по сравнению с фильтрами Баттерворта и Чебышева, однако обладают оптимальной переходной характеристикой. Переходный процесс на выходе этого фильтра при ступенчатом возмущении практически не имеет колебаний. Фазовый сдвиг выходного сигнала пропорционален частоте входного сигнала. Амплитудно-частотные характеристики трех рассмотренных фильтров нижних частот четвертого и десятого порядков показаны на рис. 2.4.7 и 2.4.8. Можно заметить, что характеристика фильтра Чебышева (кривая 3) имеет наиболее крутой спад для частот входного сигнала, превышающих частоту среза, но заметную неравномерность в полосе пропускания. Переходные процессы этих фильтров имеют большую амплитуду колебаний при ступенчатом входном сигнале. Переходный процесс для фильтра Бесселя практически не имеет колебаний. С помощью одной и той же схемы можно получить характеристики фильтра любого типа определенного порядка, изменяя лишь номиналы соответствующих резисторов и конденсаторов. Чтобы рассчитать схему конкретного фильтра, следует знать его частотные характеристики при заданном его порядке. Параметры элементов фильтра непосредственно связаны с коэффициентамиаi и bi аппроксимирующей его полиномиальной функции, которые должны иметь строго определенные значения. Корни этих полиномов могут иметь сопряженные комплексные значения, что приводит к невозможности реализации такого фильтра с помощью пассивных RС-цепей. Для реализации фильтров с сопряженными комплексными корнями могут быть использованы LRC-фильтры. Однако для низких частот нужны большие индуктивности, которые сложны в изготовлении и обладают плохими электрическими характеристиками.
Применения индуктивностей можно избежать, используя RС-схемы с активными элементами (например, операционными усилителями). Такие схемы называются активными фильтрами.
Используя логарифмическое представление, можно перейти от нижних частот к верхним, зеркально отобразив АЧХ относительно частоты среза, т. е. заменив RС на 1/RС. При этом частота среза остается без изменений, а K0 переходит в K. .

Наряду с RC фильтрами для обработки электрических сигналов можно использовать RL и RLC фильтры.Однако применение индуктивностей в фильтрах имеет ряд особенностей. К сожалению, производство катушек индуктивности и импульсных трансформаторов не поддается микроминиатюризации, что исключает их широкое применение в современной микромощной РЭА. Кроме того, индуктивности создают вокруг себя переменное магнитное поле, что требует дополнительных мер по обеспечению помехоустойчивости РЭА. Однако в сильноточных цепях, например в фильтрах питания, где токи составляют от единиц до сотен ампер,RL фильтр успешно конкурирует с RC, для которого размеры и вес конденсаторов становятся непозволительно велики. Аналогия RC и RL цепей показана на рис. 2.4.9.
Контрольные вопросы
1. Как изменяется форма напряжения на выходе дифференцирующей цепи, если изменять сопротивление, емкость цепи, длительность и период повторения прямоугольных импульсов на входе?
2. Запишите формулу для определения длительности импульса на выходе дифференцирующей цепи, если на ее вход воздействует импульс прямоугольной формы.
3. Объясните физические процессы, происходящие в дифференцирующей цепи при воздействии на нее прямоугольных импульсов напряжения.
4. Определите форму напряжения на выходе интегрирующей цепи, если ее входе импульс треугольной формы.
5. Изобразите форму напряжения на выходе дифференцирующей цепи при воздействии на ее вход последовательности прямоугольных импульсов, где длительность импульсов больше длительности паузы.
6. Определите форму напряжения на выходе дифференцирующей цепи, если на ее входе импульсы треугольной, трапецеидальной, пилообразной формы, импульсы с экспоненциальным фронтом и срезом. Как изменяется реакция на выходе цепи при изменении длительности фронта, амплитуды пульса, постоянной времени цепи?
7. Как влияет на форму выходного импульса дифференцирующей цепи выходное сопротивление генератора импульсов?
8. Объясните физические процессы, происходящие в интегрирующей цепи при воздействии на ее вход прямоугольных импульсов.
9. Какой делитель напряжения обладает самой широкой полосой пропускания?
10. Как будет изменяться форма выходного сигнала интегрирующей цепи, если изменить сопротивление цепи, емкость, длительность и период повторения входных импульсов?
11. Как влияет на форму выходных импульсов RС-цепи сопротивление нагрузки, подключаемое параллельно конденсатору С, паразитная емкость, выходное сопротивление генератора импульсов?
12. Какая цепь вызывает искажение плоской вершины импульса?
13. Какие искажения формы прямоугольного импульса вызывает интегрирующая цепь?
Пассивный полосовой фильтр — принцип работы, характеристики, схемы, формулы
Пассивные полосовые фильтры можно изготовить, соединив вместе фильтр низких частот и фильтр высоких частот.
Полосно-пропускающие фильтры могут использоваться для изоляции или фильтрации определенных частот, которые находятся в определенной полосе или диапазоне частот. Частота среза или точка ƒc в простом пассивном RC-фильтре может точно контролироваться с помощью одного резистора, включенного последовательно с неполяризованным конденсатором, и в зависимости от того, как они подключены, мы видели, что получается либо низкочастотный, либо высокочастотный фильтр.

Одно из простых применений этих типов пассивных фильтров — использование в усилителях звука или схемах, например, в фильтрах кроссовера громкоговорителя или регуляторах тембра предварительного усилителя. Иногда необходимо пропускать только определенный диапазон частот, которые не начинаются с 0 Гц (постоянный ток) или заканчиваются в верхней высокочастотной точке, но находятся в определенном диапазоне или полосе частот, узкой или широкой.
Соединяя или «каскадируя» вместе одну цепь фильтра низких частот с цепью фильтра высоких частот, мы можем получить другой тип пассивного RC-фильтра, который пропускает выбранный диапазон или «полосу» частот, которые могут быть как узкими, так и широкими, при этом ослабляя все те, которые находятся за пределами этого диапазона. Этот новый тип пассивного фильтра создает частотно-избирательный фильтр, известный как Band Pass Filter или сокращенно BPF.
Схема полосового фильтра
В отличие от фильтра низких частот, пропускающего только сигналы низкого диапазона частот, или фильтра высоких частот, пропускающего сигналы более высокого диапазона частот, полосовые фильтры пропускают сигналы в пределах определенной «полосы» или «разброса» частот, не искажая входной сигнал и не внося дополнительного шума. Эта полоса частот может быть любой ширины и обычно называется полосой пропускания фильтра.
Полоса пропускания обычно определяется как диапазон частот, существующий между двумя заданными точками отсечения частот ( ƒc ), которые на 3 дБ ниже максимального центра или резонансного пика, при одновременном ослаблении или затухании остальных за пределами этих двух точек.
Тогда для широко разнесенных частот мы можем просто определить термин «полоса пропускания», BW, как разницу между точками нижней частоты среза ( ƒcLOWER ) и верхней частоты среза ( ƒcHIGHER ). Другими словами, BW = ƒH — ƒL. Очевидно, что для правильной работы полосового фильтра частота среза фильтра низких частот должна быть выше частоты среза фильтра высоких частот.

«Идеальный» полосовой фильтр пропускания может также использоваться для изоляции или фильтрации определенных частот, лежащих в определенной полосе частот, например, для подавления шума. Полосно-пропускающие фильтры известны как фильтры второго порядка (двухполюсные), потому что в их схеме есть «два» реактивных компонента — конденсаторы. Один конденсатор в цепи низких частот и другой конденсатор в цепи высоких частот.
Частотная характеристика полосового пропускающего фильтра 2-го порядка
Приведенный выше график Боде или кривая частотной характеристики показывает характеристики полосового фильтра. Здесь сигнал ослабляется на низких частотах, а выходное напряжение увеличивается с наклоном +20 дБ/декада (6 дБ/октава), пока частота не достигнет точки «нижней отсечки» ƒL. На этой частоте выходное напряжение снова составляет 1/√2 = 70,7% от значения входного сигнала или -3 дБ (20*log(VOUT/VIN)) от входного.
Выходной сигнал продолжает усиливаться до достижения точки «верхней отсечки» ƒH, где выходной сигнал уменьшается со скоростью -20 дБ/декада (6 дБ/октава), ослабляя любые высокочастотные сигналы. Точка максимального выходного усиления обычно является средним геометрическим двух значений -3 дБ между нижней и верхней точками отсечки и называется «центральной частотой» или «резонансным пиком» ƒr. Это среднее геометрическое значение рассчитывается как ƒr 2 = ƒ(UPPER) x ƒ(LOWER).
Полосовой фильтр считается фильтром второго порядка (двухполюсным), поскольку в его структуре есть «два» реактивных компонента, то фазовый угол будет в два раза больше, чем у ранее рассмотренных фильтров первого порядка, т.е. 180o. Фазовый угол выходного сигнала опережает входной на +90o до центральной или резонансной частоты, ƒr точки, где он становится «нулем» градусов (0o) или «синфазным», а затем изменяется в сторону отставания от входного на -90o по мере увеличения выходной частоты.

Верхняя и нижняя точки частоты среза для полосового фильтра могут быть найдены по той же формуле, что и для фильтров низких и высоких частот, например.
Тогда очевидно, что шириной полосы пропускания фильтра можно управлять с помощью расположения двух точек частоты среза двух фильтров.
Пример полосового фильтра No1
Необходимо построить полосовой фильтр второго порядка с использованием RC-компонентов, который будет пропускать только диапазон частот выше 1 кГц (1 000 Гц) и ниже 30 кГц (30 000 Гц). Предполагая, что оба резистора имеют значения 10kΩ, рассчитайте значения двух необходимых конденсаторов.
Этап фильтра высоких частот
Значение конденсатора C1, необходимое для получения частоты среза ƒL 1 кГц при значении резистора 10 кОм, рассчитывается следующим образом:
Тогда значения R1 и C1, необходимые для каскада высоких частот, чтобы обеспечить частоту среза 1,0 кГц, следующие: R1 = 10kΩ и, с точностью до предпочтительного значения, C1 = 15nF.
Этап фильтра низких частот
Значение конденсатора C2, необходимое для получения частоты среза ƒH 30 кГц при значении резистора 10 кОм, рассчитывается следующим образом:
Тогда значения R2 и C2, необходимые для низкочастотного каскада, чтобы обеспечить частоту среза 30 кГц, составляют R = 10 кОм и C = 530 пФ. Однако ближайшим предпочтительным значением рассчитанного значения конденсатора 530пФ является 560пФ, поэтому вместо него используется это значение.
Учитывая, что значения сопротивлений R1 и R2 равны 10kΩ, а значения конденсаторов C1 и C2, найденные для фильтров высоких и низких частот, равны 15nF и 560pF соответственно, схема нашего простого пассивного полосового фильтра имеет вид.
Законченная схема полосового фильтра
Резонансная частота полосового фильтра
Мы также можем рассчитать «резонансную» или «центральную частоту» (ƒr) полосового фильтра, когда выходное усиление достигает максимального или пикового значения. Это пиковое значение не является средним арифметическим верхней и нижней точек отсечки -3 дБ, как можно было бы ожидать, а представляет собой «геометрическое» или среднее значение. Это среднее геометрическое значение рассчитывается, например, как ƒr 2 = ƒc(UPPER) x ƒc(LOWER):
Уравнение центральной частоты
Где, ƒr — резонансная или центральная частота
ƒL — нижняя точка частоты среза по уровню -3 дБ
ƒH — верхняя точка среза частоты -3 дБ
и в нашем простом примере выше, рассчитанные частоты среза составили ƒL = 1 060 Гц и ƒH = 28 420 Гц, используя значения фильтра.
Подставив эти значения в вышеприведенное уравнение, можно получить центральную резонансную частоту:
Краткое описание полосового фильтра
Простой пассивный полосовой фильтр может быть изготовлен путем каскадного соединения одного фильтра низких частот с фильтром высоких частот. Диапазон частот в герцах между нижней и верхней точками среза по уровню -3 дБ комбинации RC называется «полосой пропускания» фильтра.
Ширина или частотный диапазон полосы пропускания фильтра может быть очень маленькой и селективной или очень широкой и неселективной в зависимости от используемых значений R и C.
Точка центральной или резонансной частоты является средним геометрическим нижнего и верхнего срезов. На этой центральной частоте выходной сигнал максимален, а фазовый сдвиг выходного сигнала такой же, как и входного.
Амплитуда выходного сигнала полосового фильтра или любого другого пассивного RC-фильтра всегда будет меньше амплитуды входного сигнала. Другими словами, пассивный фильтр также является аттенюатором, дающим коэффициент усиления по напряжению менее 1 (Единство). Чтобы обеспечить выходной сигнал с коэффициентом усиления по напряжению больше единицы, в конструкции схемы требуется некоторая форма усиления.
Пассивный полосовой фильтр классифицируется как фильтр второго порядка, поскольку в его конструкции есть два реактивных компонента — конденсаторы. Он состоит из двух отдельных фильтрующих RC-цепей, которые сами являются фильтрами первого порядка.
При каскадном соединении нескольких фильтров результирующая схема будет называться фильтром «n-го порядка», где «n» означает количество отдельных реактивных компонентов и, следовательно, полюсов в цепи фильтра. Например, фильтры могут быть 2-го порядка, 4-го порядка, 10-го порядка и т.д.
Чем выше порядок фильтра, тем круче будет наклон при n раз -20 дБ/декада. Однако один конденсатор, полученный путем объединения двух или более отдельных конденсаторов, все равно остается одним конденсатором.
Наш пример выше показывает кривую выходной частотной характеристики для «идеального» полосового фильтра с постоянным коэффициентом усиления в полосе пропускания и нулевым коэффициентом усиления в полосе останова. На практике частотная характеристика этой схемы полосового фильтра не будет такой же, поскольку входное реактивное сопротивление цепи высоких частот будет влиять на частотную характеристику цепи низких частот (компоненты подключены последовательно или параллельно) и наоборот. Один из способов преодоления этой проблемы — обеспечить электрическую развязку между двумя цепями фильтра, как показано ниже.
Буферизация отдельных ступеней фильтра
Одним из способов объединения усиления и фильтрации в одной схеме является использование операционного усилителя (Op-amp), примеры которого приведены в разделе «Операционный усилитель». В следующем уроке мы рассмотрим схемы фильтров, в которых операционный усилитель используется не только для усиления, но и для обеспечения изоляции между каскадами. Такие схемы фильтров обычно называются активными фильтрами.