7.6.1. Тактильные датчики касания и контактного давления

Одиночные тактильные датчики касания и давления размещают на внешних поверхностях захватного устройства. Матрицы этих датчиков устанавливаются преимущественно внутри (на «ладони»). Поскольку контакт ЧЭ матриц с объектом работы происходит сразу во многих точках, то возникает возможность определения формы объекта, его ориентации, а также направление возможного проскальзывания. Самой существенной особенностью тактильные датчики захватного устройства, отличающей их от других информационных устройств робота, является наличие непосредственного контакта с объектом работы. Ударные нагрузки, возникающие при замыкании кинематической цепи манипулятора, агрессивное воздействие внешней среды и т.п. факторы определили особое значение не метрологических, аэксплуатационных требований. Поэтому, наряду с традиционными ЧЭ, используемыми при построении силоизмерительных устройств в тактильных системах широко применяются микропереключатели, а также материалы на базе электропроводных полимеров и углеродных волокон. Ведутся разработки новых технологий, позволяющих получать износо- и термостойкие тензочувствительные материалы.
Наибольшее распространение в промышленности нашли дискретные тактильные датчики. Они обладают релейной функцией преобразования и служат для фиксации факта контакта исполнительного механизма с объектом или препятствием. Дискретные датчики явились первыми тактильными средствами и устанавливались на внутренних сторонах пальцев захватного устройства, с целью определения наличия или отсутствия объекта в зоне захвата. В качестве ЧЭ таких датчиков применялись микропереключатели (в отечественных моделях — МП 5, МП 12) или герконы (КЭМ 1, КЭМ 2). На рис. 7.27а представлен пример простого тактильного датчика на основе микропереключателя.
Другая схема этого типа использовалась в системе очувствления подводного манипулятора Curv. Здесь перемещение любого «уса» на расстояние, большее 0,01 мм деформирует упругую полусферу, вызывает смещение магнита и замыкание геркона (рис. 7.27б). Дискретные тактильные датчики характеризуются малыми усилиями срабатывания, не превышающими 0,15 . 0,20 Н.

Впоследнее время все чаще используютсяматрицы из дискретных тактильных датчиков. Пример матрицы размерностью 88 элементов приведен на рис. 7.28 а. УЭ матрицы представляют собой 64 полусферические стальные мембраны с межцентровым расстоянием 2,5 мм. Такая мембрана имеет два устойчивых положения — выпуклое и вогнутое, причем выпуклое положение удерживается избыточным давлением воздуха. Координаты касания вычисляются с помощью контроллера и коммутатора, поочередно опрашивающего все элементы матрицы (рис. 7.28б). Порог срабатывания составляет 0,2 . 0,5 Н.
Все дискретные тактильные устройства обладают тремя существенными недостатками: во-первых, ограниченным ресурсом работы, во-вторых, невозможностью определения величины контактного усилия, и, в-третьих, неточностью локализации места контакта. Модель мягкой, усеянной рецепторами кожи вдохновляла многих экспериментаторов на создание соответствующих заменителей — «искусственных кож», в том числе на основе эластомеров (баристоров), PVF2 -пленок и композитных материалов с волокном из графита.

Первой схемой аналогового «распределенного» тактильного датчика явилась разработка француза Ж. Кло, предложившего в качестве ЧЭ использовать электропроводящий силиконовый каучук. На рис. 7.29а представлена схема датчика из этого материала. Преобразователь состоит из двух проволочных пластин — электродов, с взаимно перпендикулярным расположением проводников. Пластины разделены слоем силиконового каучука толщиной 200 мкм. Контактные точки в местах пересечения проводников образуют аналоговые ЧЭ. Ток через ЧЭ определяется локальной проводимостью эластомера, пропорциональной приложенному усилию. Действительно, при отсутствии давления на датчик площадь контактного пятна мала, его сопротивление велико и ток через ЧЭ практически отсутствует. При сжатии, сопротивление пятна уменьшается и ток возрастает. Недостатком эластомерных конструкций является нелинейная функция преобразования (рис. 7.29б) и существенный гистерезис. Для улучшения метрологических характеристик применяется предварительное двухстороннее поджатие эластомера пластинами-электродами. Этот принцип использовался в «искусственной коже» К. Бейтси, а также в промышленных тактильных матрицах. Первой успешной промышленной разработкой явилась матрица LTS-200 фирмы Lord Corp. (США) размерностью (128), межцентровым расстоянием 2,5 мм и диапазоном изменения сопротивления 100 . 5000 Ом. В качестве несущей конструкции матрицы используются металлические элементы. Дальнейшим развитием идеи эластомерных тактильных датчиков явилось создание БИС тактильной матрицы, выполненной по n-МОП технологии. Подложка содержит двумерный массив ячеек, размером 1,60,9 мм, поверх которого уложен слой электопропроводящей пластмассы, толщиной 0,5 мм. В данной конструкции реализована концепция «интеллектуализации» сенсорной функции, и структурно она представляет собой тактильную систему с устройствами съема и обработки данных. Ядром системы является внутрикристальный процессор, выполняющий опрос локальных ячеек, формирование двоичного кода тактильного образа, а также выделение тактильного контура, на основе алгоритмов свертки. Рассмотренный датчик размерностью 2525 ЧЭ при размере одной ячейки 11 мм, имеет суммарную площадь 6,3 см 2 .
Несмотря на все более широкое внедрение эластомерных тактильных матриц в промышленную робототехнику им присущ ряд недостатков. Во-первых, они обладают невысокими метрологическими параметрами, вследствие гистерезиса и нелинейной функции преобразования. Во-вторых, эластомер не является достаточно надежным и долговечным материалом: его ресурс ограничен (2 … 3) 10 5 циклами нагружения.

Пожалуй, наилучшим материалом для упруго-чувствительных элементов тактильных датчиков, является ткань из тонкихуглеродных нитей диаметром 7 . 30 мкм. Наряду с высокой прочностью и упругостью, характерной для углеродных соединений, и, следовательно, малым гистерезисом, углеволоконная ткань обладает высокой износостойкостью, а малая толщина нитей позволяет использовать этот материал для покрытия сложных криволинейных поверхностей манипулятора. Сопротивление пересечения между нитями изменяется плавно (данный эффект определяется суммарными свойствами отдельных волокон, составляющих нить), а проводимость пересечения определяется числом контактов между волокнами. Уровень шума весьма низок (число «плохих» контактов усредняется среди всего их множества).
Ненагруженное пересечение двух пучков сечением 0,5 мм 2 имеет сопротивление 2 кОм, при уровне помех 5 %. При приложении силы в 0,01 Н сопротивление понижается до 1 кОм, а уровень помех — до 0,5 % [ ]. Углеволоконная ткань прядется пучками графитовых и стеклянных нитей или формируется в виде «войлочной» структуры (рис. 7.30). Во втором случае, углеродные пряди разделяются на куски длиной 2,5 мм, укладываются в форму и уплотняются до толщины 1 мм. (В среднем, сопротивление такого элемента площадью 1 см 2 составляет 200 Ом). На рис. 7.30 функция преобразования тактильной матрицы разбита на четыре участка: А — область шумов, В — область уплотнение волокон (при этом увеличивается количество путей для протекания тока), С — область искривления волокон, D — область деформации волокон (в этом случае, увеличивается площадь контакта между ними).
Углеволоконные датчики используют до контактных давлений 2 10 5 Н/м 2 , причем гистерезис не превышает 1 %.
ТакТильные чувствительные элементы
Тактильные датчики — это специальный класс преобразователей силы или давления, которые характеризуются небольшой толщиной. Эти датчики полезны в случаях, когда сила или давление измеряются между двумя поверхностями, расположенными близко друг к другу. Такие датчики часто используются в робототехнике, например, их устанавливают на «пальцы» механических приводов для обеспечения обратной связи при контакте с объектом — это напоминает то, как работают тактильные сенсоры кожи человека. Датчики касания используются в сенсорных дисплеях, клавиатурах и других устройствах, где необходимо реагировать на физическое прикосновение. Тактильные датчики широко применяются в биомедицине, для определения прикуса зубов и правильности установки коронок в стоматологической практике, а также при исследовании давления на ноги человека при ходьбе. Иногда при проведении операций протезирования их устанавливают в искусственные суставы для корректировки положения и т.д. В строительстве и на механических производствах тактильные датчики используются для определения сил, действующих на закрепленные устройства.
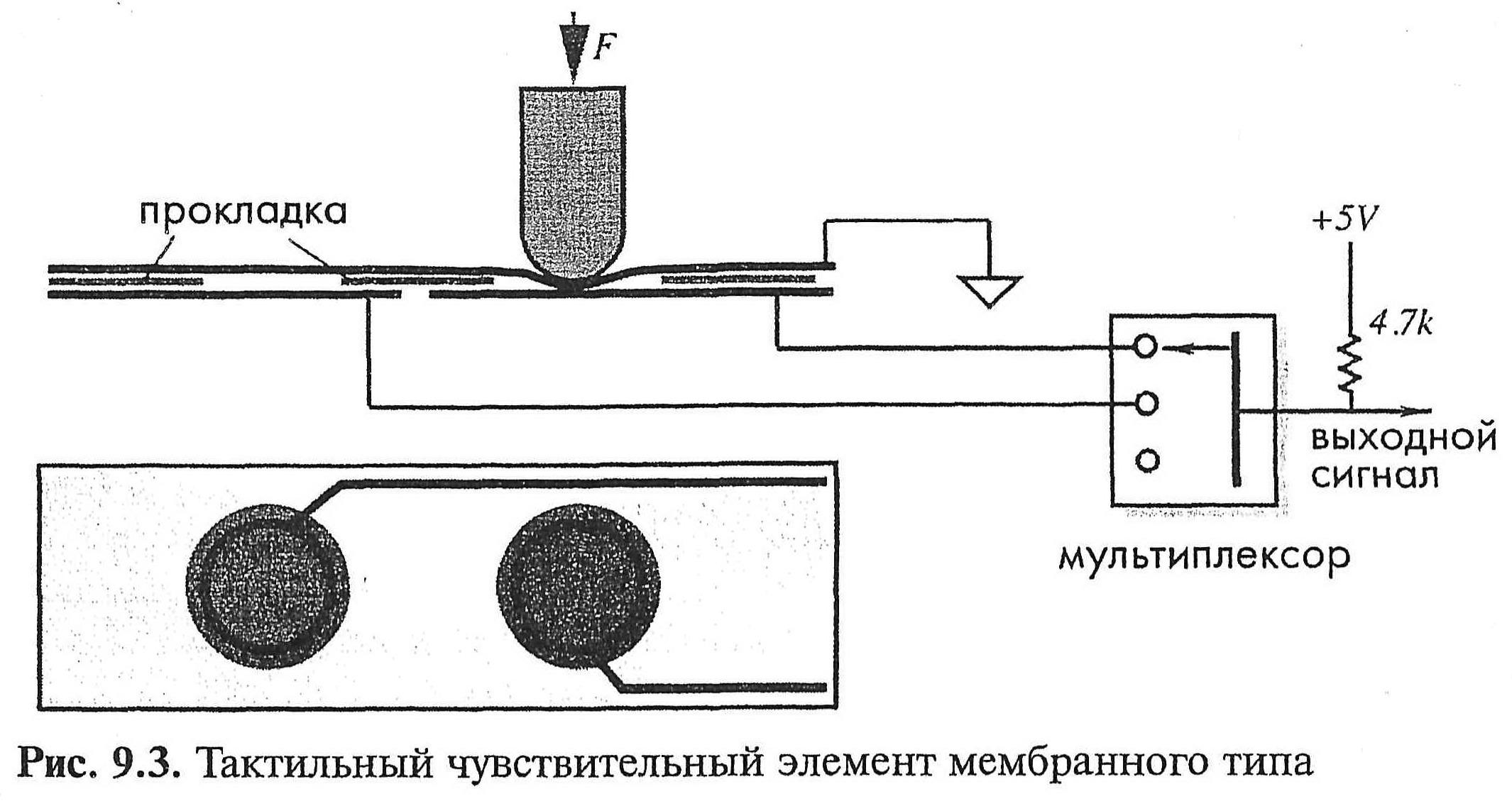
Для изготовления тактильных чувствительных элементов используются несколько методов. В некоторых из них на поверхности объекта формируется специальный тонкий слой из материала, чувствительного к механическим напряжениям. На рис. 2 показан простой тактильный датчик, обеспечивающий функции включения-выключения, состоящий из двух листов фольги и прокладки. Внутри прокладки сделаны круглые (или любой другой необходимой формы) отверстия. Один из листов фольги заземлен, а второй подсоединен к нагрузочному резистору. Если требуется контролировать несколько чувствительных зон, используется мультиплексор. Когда к верхнему проводнику прикладывается внешняя сила над отверстием в прокладке, он прогибается и соприкасается с нижним проводником, тем самым устанавливая с ним электрический контакт, заземляющий нагрузочный резистор. При этом выходной сигнал становится равным нулю, что свидетельствует о приложенной силе. Верхний и нижний проводники могут изготавливаться методом трафаретной печати проводящими чернилами на подложке из таких материалов, как Mylar® или полипропилен. Чувствительные зоны таких датчиков определяются рядами и колонками проводников, нанесенных чернилами. Прикосновение к определенному участку чувствительной поверхности приводит к замыканию соответствующих ряда и колонки, что показывает локализацию приложенной силы.
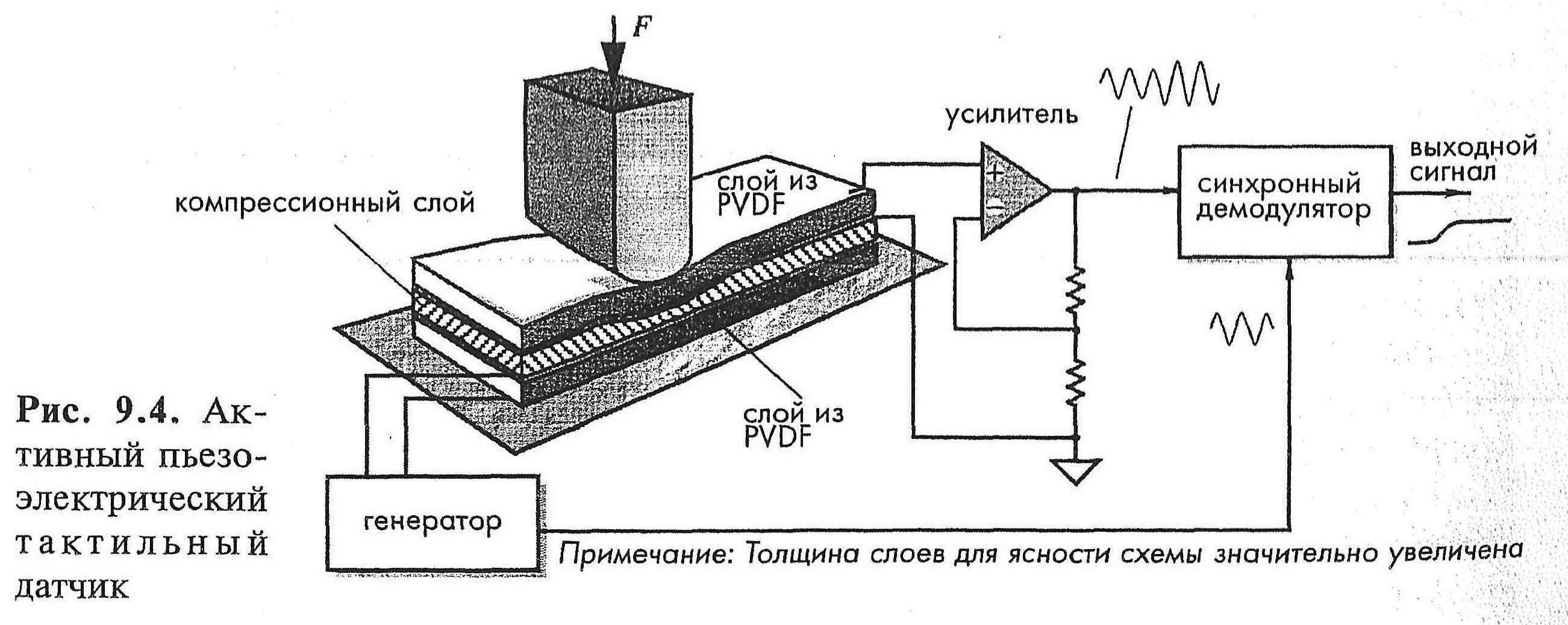
Хорошие тактильные датчики получаются на основе пьезоэлектрических пленок, например, из поливинилиден фторида (PVDF), которые используются как в пассивном, так и в активном режимах. На рис. 3 показан активный ультразвуковой пьезоэлектрический тактильный датчик, состоящий из трех слоев пленок, соединенных вместе (в датчике существуют еще дополнительные защитные слои, не показанные на рисунке). Верхний и нижний слои изготовлены из PVDF пленок, а центральный слой обеспечивает акустическую связь между крайними слоями. Механические характеристики центральной пленки определяют чувствительность и рабочий диапазон датчика. На нижний пьезоэлектрический слой подается переменное напряжение от генератора. Эти колебания заставляют периодически сжиматься и пленку из PVDF, и промежуточный компрессионный слой, и верхнюю пленку из PVDF, играющую роль приемника. Поскольку пьезоэлектричество является обратимым явлением, с верхней пленки снимается переменное напряжение, которое усиливается и выпрямляется на синхронном демодуляторе, реагирующем как на амплитуду, так и на фазу поступающего сигнала. Когда к верхнему слою прикладывается внешняя сила F, механические характеристики трехслойной структуры изменяются, что отражается на фазе и амплитуде выходного сигнала.
определенных пределах выходной сигнал тактильного датчика линейно зависит от приложенной силы. Если толщина пленок из PVDF составляет 25 мкм, а толщина компрессионной пленки из силиконовой резины — 40 мкм, толщина всего чувствительного элемента (включая защитные слои) не превышает 200 мкм. Электроды из PVDF пленки могут быть сформированы в виде ячеек либо на передающей, либо на приемной стороне. Применение мультиплексирования при подключении ячеек позволяет распознавать зоны приложения внешней силы. Такой датчик также может использоваться для измерения небольших перемещений. При определении перемещений в несколько миллиметров его точность составляет ±2 мкм. Достоинства данного датчика — простота и выходной сигнал в виде постоянного напряжения (т.е. способность детектировать статические силы)
На рис. 4 А показан еще один вариант пьезоэлектрического тактильного датчика, в котором полоски из PVDF пленки встраиваются в слой резины на поверхности преобразователя. Такой датчик является пассивным устройством, поскольку для генерации выходного сигнала ему не требуется дополнительного возбуждения, поэтому он реагирует, в основном, на частоту механических воздействий, а не на их амплитуду. Конструкция данного датчика разработана для применения в робототехнике для отслеживания неровностей исследуемой поверхности. Поскольку здесь чувствительный элемент встроен в поверхностный слой, его выходной сигнал соответствует перемещениям этого слоя, возникающим из-за действия сил трения.
Датчик встраивается в жесткую конструкцию («палец» робота), имеющую пористый упругий внутренний слой (1 мм толщиной), на который наносится слой из силиконовой резины («кожа»). Иногда между этими слоями располагается вспомогательная жидкостная прослойка. Поскольку полоски из пьезоэлектрической пленки располагаются на некоторой глубине от поверхности «кожи», а их чувствительность зависит от их ориентации, величина сигнала определяется направлением перемещения «пальца». На рис. 4 Б показан биполярный выходной сигнал такого датчика, способного отслеживать неоднородности поверхности высотой порядка 50 мкм.

Приведем еще несколько примеров датчиков на основе PVDF и других полимерных пленок [6]. Многие тактильные датчики выполняют функции сенсорных переключателей. В отличие от традиционных переключателей, надежность контактов которых сильно снижается при попадании на них влаги и пыли,пьезоэлектрические ключи, благодаря своему монолитному исполнению, могут работать в неблагоприятных условиях окружающей среды. Один из вариантов таких переключателей состоит из стальной консольной балки, на которую нанесен слой пьезоэлектрической пленки. Балка одним концом прикреплена к плате схемы (рис. 5 А), на входе которой стоит ключ на основе полевого МОП транзистора, не потребляющего энергию в нормально открытом состоянии. Как только к балке будет приложено механическое усилие, напряжение, возникшее на пленке, мгновенно переключит МОП ключ, и на его выходе появится ВЫСОКИЙ уровень сигнала. Такой сенсорный переключатель не подвержен ни коррозии, ни выгоранию, у него нет дребезга контактов, обычно присущих традиционным механическим переключателям. Он выдерживает до 10 миллионов циклов безаварийной работы. Простота конструкции делает такие переключатели привлекательными для использования в различных промышленных счетчиках, в системах автоматизации технологических процессов, в разливочных аппаратах и т.д., но самое широкое распространение они получили в игровых автоматах для игры в пинбол. На рис. 5 Б показано устройство еще одного пьезоэлектрического выключателя консольного типа, в котором PVDF пленка размещается между двух подложек разной толщины. Такая конструкция обеспечивает очень сильное растяжение пьезопленки при отклонении балки от нейтральной оси вверх и сильное ее сжатие при отклонении балки в противоположном направлении. Рассматриваемые пьезоэлектрические выключатели нашли свое применение в счетчиках потребления газа и электроэнергии. Для таких переключателей не требуются внешние источники питания, поэтому газовым счетчикам на их основе не страшны проскоки искр. Пьезоэлектрические ключи балочного типа часто монтируются в обод баскетбольной корзины для определения попадания в нее мяча. Такие переключатели также встраиваются в мягкие куклы для детектирования поцелуя в щечку или щекотания каких-либо ее частей, в торговые

или игровые автоматы для их запуска при обнаружении опущенной монеты, в цифровые потенциометры для повышения надежности.
Тактильные элементы на основе пьезоэлектрических пленок способны работать в широких частотных и динамических диапазонах и поэтому часто используются в электронных музыкальных инструментах. Например, они встраиваются в педальные переключатели больших и малых барабанов, в переключатели тамтамов, а также в клавиши электропианино. Пьезоэлектрические пленочные сенсоры реагируют на силу, с которой барабанщик давит на педаль или пианист нажимает на клавишу. В электропианино встроенные в клавиши пьезоэлементы обеспечивают динамический диапазон и длительность звучания нот в строгом соответствии с ходом клавиши.
На текстильных заводах требуется проводить непрерывный мониторинг нескольких тысяч нитей на обрыв. Необнаруженный вовремя обрыв может привести к порче большого куска ткани, поскольку стоимость работ по реставрации материала часто превышает стоимость ее производства. Традиционные сенсоры, определяющие обрыв нити по замыканию контактов, не очень надежны, поскольку пух загрязняет контактные площадки и не дает возможности обнаруживать разрыв нити. Вибрационный датчик на основе пьезоэлектрической пленки, встроенный в тонкую стальную балку, отслеживает акустический сигнал, возникающий от трения нити при ее прохождении над балкой (рис. 5 В). Отсутствие характерных вибраций приводит к немедленной остановке ткацкого станка.
На рис. 6 показан датчик на основе PVDF пленки, используемый для контроля за частотой дыхания спящего ребенка. При этом детектируются малейшие движения тела, возникающие при вдохе и выдохе, что необходимо для обнаружения внезапной остановки дыхания [7]. Датчик размещается под матрасом кроватки. Тело нормально дышащего ребенка из-за подъема и опускания диафрагмы при дыхании совершает небольшие колебательные движения, что вызывает смещение его центра тяжести. Именно это смещение и контролируется датчиком. Датчик состоит из трех слоев: PVDF пленка расположена между подложкой из силиконовой резины и прижимного слоя из пластика, например, такого как МИаг. Сторона прижимного слоя, направленная к PVDF пленке, имеет гофрированную поверхность. Под действием переменной силы тяжести в PVDF слое возникает электрический заряд, поступающий на вход преобразователя ток-напряжение, с выхода которого снимается переменный выходной сигнал с амплитудой, пропорциональной в определенном диапазоне приложенной силе.

Другой разновидностью тактильных датчиков является пьезорезистивный чувствительный элемент. Он изготавливается из материалов, чье электрическое сопротивление зависит от приложенного механического напряжения или давления [8]. К таким материалам относятся проводящие эластомеры или пасты, чувствительные к изменению давления. Проводящие эластомеры изготавливаются из силиконовой резины, полиуретана и других материалов, в состав которых входят проводящие частицы или волокна. Например, проводящая резина получается при введении в обычную резину угольного порошка. Принцип действия эластомерных датчиков основан либо на изменении площади контактов при сдавливании эластомера между двумя проводящими пластинами (рис. 7 А), либо на изменении толщины эластомерного слоя. В зависимости от величины внешней силы, действующей на датчик, меняется площадь контактной зоны между прижимным устройством и эластомером, в результате чего изменяется электрическое сопротивление. При определенном давлении эта площадь становится максимально возможной, и передаточная функция входит в режим насыщения (рис. 8 Б). Для резистивного полимера Velosat™ толщиной 70 мкм и удельным сопротивлением пленки 11 кОм/см 2 , сопротивление при давлении выше 16 кПа определяется следующим аппроксимационным соотношением:

(2)


Однако следует отметить, что значения сопротивления может значительно дрейфовать, когда полимер подвергается действию давления длительное время. Поэтому такие пьезорезистивные датчики применяются, как правило, для качественных, а не количественных измерений.

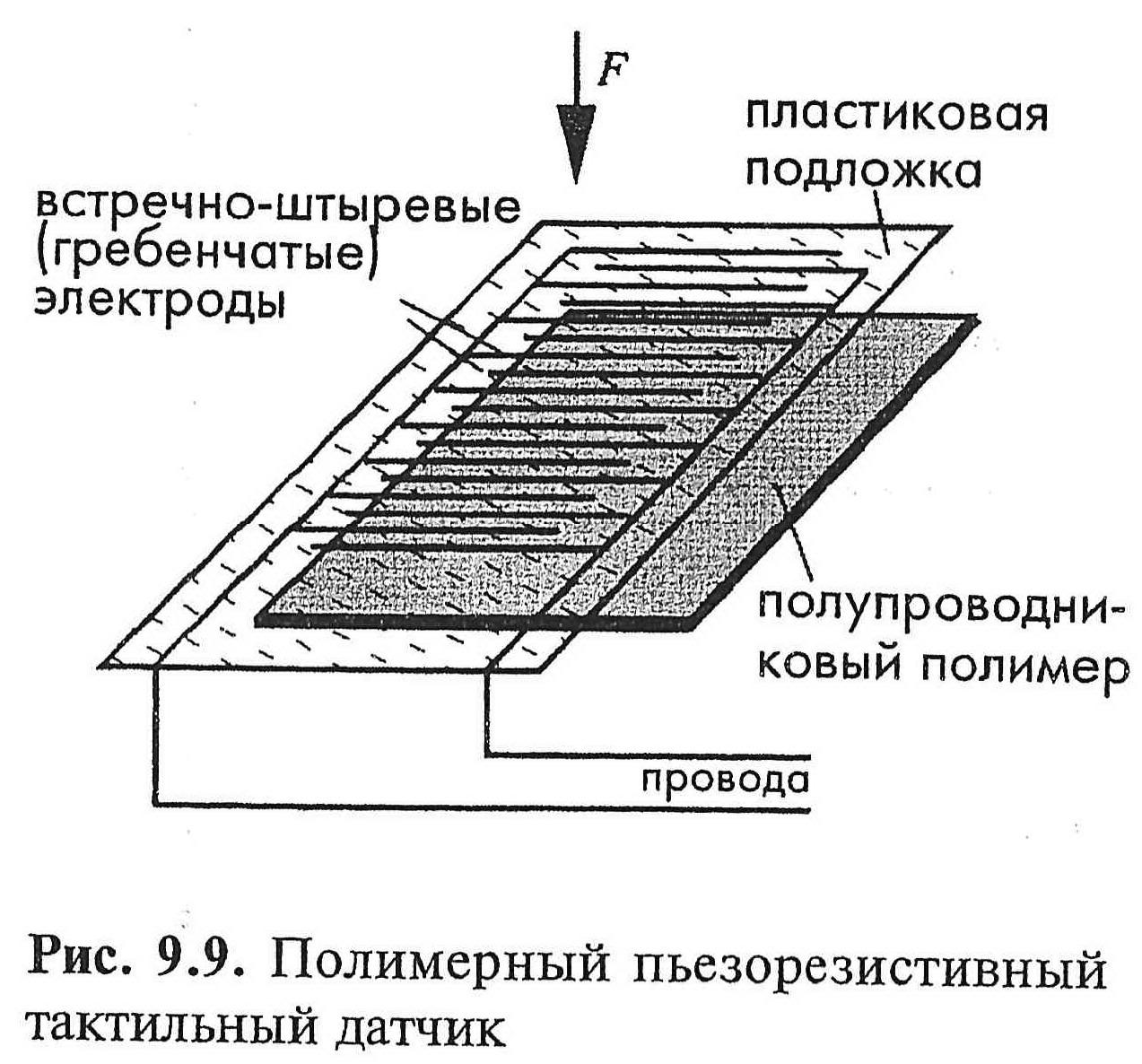
олее тонкие пьезорезистивные тактильные датчики получаются из полупроводниковых полимеров, сопротивление которых также зависит от давления. Конструкция таких датчиков напоминает мембранный переключатель (рис. 8) [9]. По сравнению с тензодатчиками пьезорезистивные чувствительные элементы обладают более широким динамическим диапазоном: типовое изменение сопротивления составляет три порядка при изменении силы в интервале 0. 3 кг, но более низкой точностью (обычно ±10%). Однако в тех случаях, когда не требуется точное измерение силы, а решающим является стоимость датчика, применение таких детекторов является оправданным. Толщина типовых пьезорезистивных полимерных датчиков обычно составляет 0.25 мм, но возможно изготовление и более тонких структур.

В
робототехнике требуются тактильные микросенсоры, обладающие хорошим пространственным разрешением, высокой чувствительностью и широким динамическим диапазоном. Принцип действия порогового тактильного детектора с механическим гистерезисом может быть основан на использовании пластической деформации кремниевой мембраны [ 10]. На рис. 9 показано интегральное исполнение кремниевого тактильного микропереключателя, состоящего из герметичной полости, сформированной внутри кремниевой подложки, плотно закрытой тонкой мембраной. При отсутствии внешних сил за счет расширения газа, находящегося внутри полости, мембрана образует выпуклый купол. При нормальной температуре и приложенной силе, превышающей критическое значение, верхний электрод прогибается вниз, контактируя с нижним электродом.
Исследования показали, что такой ключ замыкается при давлении порядка 13 psi (фунт на квадратный дюйм), а его гистерезис равен 2 psi. Сопротивление ключа в разомкнутом состоянии составляет 10 кОм, что приемлемо для маломощных схем.
На рис. 10 показан еще один вариант тактильного микропереключателя [11], в котором вместо газа, находящегося под давлением, применяется вакуум. Здесь вакуумная микрокамера находится между холодным катодом и подвижным анодом в виде диафрагмы. Когда между анодом и кремниевым выступом на катоде появляются положительная разность потенциалов, формируется электрическое поле. Если напряженность поля превышает значение 5×10 7 В/см, электроны совершают туннельный переход с катода в вакуумную камеру. Сила поля, а, следовательно, количество испускаемых электронов (ток эмиссии) определяется величиной потенциала на аноде. Когда к аноду прикладывается внешняя сила, он опускается вниз, изменяя тем самым напряженность поля и ток эмиссии.
Ток эмиссии может быть выражен через напряжение на аноде V:

(3)

где а и b — константы, а β — геометрический коэффициент выступа на катоде, определяемый расстоянием между анодом и катодом. Для повышения чувствительности радиус кривизны выступа должен составлять порядка 0.02 мкм [1].
Работа тактильного датчика и его типы
WSG -DSA — это палец захвата, который объединяет тактильное распознавание для обратной связи профиля с высоким разрешением во время захвата. Для сенсорных целей он использует интеллектуальный тактильный преобразователь DSA9205i. Он устанавливается на верхней части базовых губок WSG и напрямую связан с контроллером захвата через встроенный порт датчика в базовых губках, поэтому не требуются внешние компоненты и кабели для включения тактильного устройства в ваши манипуляционные приложения. Эти типы датчиков пальца обнаруживаются автоматически и параметризуются WSG. Профиль давления можно использовать изнутри контроллера захвата с помощью мощного интерфейса сценариев. В этой статье рассматриваются типы тактильных датчиков и их работа.
Что такое тактильный датчик?
Тактильный датчик — это устройство. Он измеряет поступающую информацию в ответ на физическое взаимодействие с окружающей средой. Чувство осязания у людей обычно моделируется, то есть кожное ощущение и кинестетическое чувство. Кожное прикосновение позволяет обнаруживать раздражители, возникающие в результате механической стимуляции, боли и температуры. Кинестетическое прикосновение принимает сенсорные сигналы от рецепторов, находящихся внутри мышц, сухожилий и суставов.

Тактильный датчик
Типы тактильных датчиков
Существуют различные типы тактильных датчиков, которые приведены ниже
- Датчик силы / крутящего момента
- Динамический датчик
- Датчик температуры
Датчик силы / крутящего момента
Датчики силы / крутящего момента используются в сочетании с тактильным массивом для предоставления информации для управления силой. Эти типы датчиков могут воспринимать нагрузку в любом месте, например, на дистальном звене манипулятора, и в ограничениях, как датчик кожи. Датчик кожи обычно обеспечивает более точное измерение силы при более широкой полосе пропускания. Если звено манипулятора определено в общем и предполагается контакт точки сигнала, то датчик силы / момента может дать информацию о месте контакта силы и моментов — это называется внутренним тактильным восприятием. Изображение датчика крутящего момента показано ниже.

Сила или Датчик крутящего момента
Динамический датчик
Динамические датчики — это акселерометры меньшего размера, расположенные на полосках или на коже пальца робота. Общая функция подобна тельцам Пачини у людей и имеет одинаково большие соответствующие поля; таким образом, одного или двух акселерометров кожи достаточно для всего пальца. Эти датчики эффективно обнаруживают установление и разрыв контакта, вибрации, связанные со скольжением по текстурированным поверхностям.
Динамический датчик
Датчик уровня стресса — это второй тип динамических тактильных датчиков. Если кончик пальца скользит со скоростью несколько см / с в целом по поверхности с небольшими неровностями или ямками, временные изменения на коже становятся важными. Пьезоэлектрический полимер, такой как PVDF, создает заряд в ответ на повреждение, который может быть применен для создания тока, который прямо пропорционален диапазону изменения.
Датчик температуры
Температурные датчики важны для способности человека определять материалы, из которых изготовлены объекты, но некоторые из них также используются в робототехнике. Термическое зондирование включает в себя определение температурных градиентов на коже, которые соответствуют как температуре, так и теплопроводности объекта. Роботизированные термодатчики участвуют в переходах Пельтье в сочетании с термисторами.

Датчик температуры
Принцип работы и принципиальная схема тактильного датчика
Тактильные датчики разработаны для обеспечения тактильного восприятия для телеоперационных манипуляторов и интеллектуальных роботов. Тактильные датчики могут идентифицировать нормальную силу, приложенную к тактильным пикселям, чтобы гипнотизировать контроль силы и тактильные изображения, а также для распознавания объектов. Однако для получения тактильных изображений и нормальных сил информация о тангенциальном движении имеет решающее значение для контроля силы и предотвращения скольжения, что завораживает успех задачи — поэтому требуются трехмерные тактильные датчики.
Принципиальная схема тактильного датчика
Существует несколько трехмерных тактильных датчиков, разработанных с использованием пьезорезистивных, емкостных и дополнительных чувствительных элементов, и эти тактильные датчики изготовлены по технологии MEMS. Интегрированные чувствительные элементы и схемы предварительной обработки предназначены для компактности, но они слишком слабы и легко ломаются для большинства приложений; и, например, диапазон силы тактильного датчика составляет всего 0,01 Н w4x, а другие тактильные датчики не предусмотрены технологией MEMS. На приведенной ниже схеме показана схема тактильного датчика.
Тактильный датчик в робототехнике
Тактильный датчик, который используется в роботах НАСА, представлен ниже
- Один из примеров, напрямую связанных с исследованием планет.
- НАСА использует эти датчики на международной космической станции для помощи людям в ремонте / обслуживании окружающей среды
- НАСА испробовало множество тактильных датчиков в робототехнике, которые находятся на начальной стадии. Они использовали резистор, чувствительный к силе, и теперь используются композиты для квантового туннелирования.
Приложения тактильного датчика
Приложения тактильных датчиков используются в
- Робототехника
- Компьютерное оборудование
- Система безопасности
- Устройства с сенсорным экраном на мобильном телефоне
- Вычисления
Преимущества тактильного датчика
Преимущества тактильного датчика приведены ниже:
- Они предлагают простые в использовании решения для тактильных датчиков.
- Тактильный датчик не имеет внешних компонентов и кабелей.
- Компактное извлечение
- Проверенная технология тактильного распознавания от робототехники.
Речь идет о принципе работы тактильного датчика и его применении. мы надеемся, что данная информация будет полезна для предоставления хорошей информации и понимания проекта. Кроме того, если у вас есть какие-либо вопросы относительно этой концепции в электрических и электронных проектах, вы можете прокомментировать их в разделе ниже. Вот вам вопрос — каковы функции тактильных датчиков?
Авторские фото:
- Квадратное пространство тактильного датчика
- Способы измерения датчика силы / крутящего момента
- Нониус динамического датчика
- Изображения термодатчика — amazon
- Как работает датчик расстояния и его применение
- Что такое датчик IMX586:работа и его особенности
- Как работает датчик веса и его характеристики
- Работа виртуального датчика и его приложения
- Работа датчика напряжения и его применение
- Лямбда-датчик — работа и его применение
- Работа датчика IMU и его приложения
- Работа датчика занятости и его приложения
- Работа дверного датчика и его применение
- Работа датчика NFC и его приложения
Работа датчика влажности и его применение Влажность равна мера количества водяного пара, присутствующего в воздухе. Влажность рассчитывается как относительная влажность и абсолютная влажность. Для промышленных и медицинских помещений относительная влажность становится важным фактором. Повышение значений влажности сверх пороговых значений мо
Датчик DHT11 и его работа Влажность — это мера водяного пара, присутствующего в воздухе. Уровень влажности воздуха влияет на различные физические, химические и биологические процессы. В промышленных приложениях влажность может повлиять на коммерческие расходы на продукцию, здоровье и безопасность сотрудников. Таким образом,
Работа датчика дождя и его приложения В настоящее время экономия воды, а также ее правильное использование имеют важное значение в жизни каждого человека. Вот датчик, а именно датчик дождя, который используется для обнаружения дождя и подачи сигнала тревоги. Таким образом, мы можем сэкономить воду, чтобы использовать ее в дальнейшем для
Работа лазерного датчика и его приложения Приложения производственного обследования необходимо обнаружение наличия и отсутствия объекта. Решить эту проблему можно, используя лазерный датчик для решения задач контроля качества. Достижение стабильных и точных измерений необходимо для обеспечения надежных показателей продукции и безошибочного
Глава 7 (Учебник — информационные системы), страница 7
Файл «Глава 7» внутри архива находится в папке «Учебник — информационные системы». Документ из архива «Учебник — информационные системы», который расположен в категории » «. Всё это находится в предмете «информационные устройства и системы» из 9 семестр (1 семестр магистратуры), которые можно найти в файловом архиве МГТУ им. Н.Э.Баумана. Не смотря на прямую связь этого архива с МГТУ им. Н.Э.Баумана, его также можно найти и в других разделах. Архив можно найти в разделе «книги и методические указания», в предмете «информационные устройства и системы» в общих файлах.
Онлайн просмотр документа «Глава 7»
Текст 7 страницы из документа «Глава 7»
Fq(q0) = Cq(q0) q, Здесь параметр Cq(q0) можно назвать матрицей обобщенной жесткости СМД. Поскольку для «упругого упора» справедливо равенство F = C R, то обобщенная жесткость СМД в точке q0 определится зависимостью: Cq(q0) = J T (q0) C J(q0). Следовательно, уравнение динамики манипулятора с запястным СМД в окрестности точки контакта запишется следующим образом: A(q0) q + (dFк/dq) q = Q(q0) + J T (q0)CJ(q0) q, где A(q0) — матрица инерции механической системы робота, Fк(q, dq/dt) — вектор центробежных и кориолисовых сил, Q(q0) — вектор активных обобщенных сил манипулятора (например, вектор моментов, развиваемых приводами). Таким образом, сигнал управления исполнительным механизмом Q*(t) должен формироваться в виде: Q*(t) = Q [R, A, C, J(q0), t] Данное выражение показывает, что для обеспечения заданного качества управления необходимо учитывать, наряду с другими факторами, жесткость СМД и конфигурацию исполнительного механизма робота. Другими словами, система, устойчивая при одной конфигурации манипулятора может потерять устойчивость при ее изменении. В частности, это характерно при работе манипулятора в большой зоне обслуживания, например, для технологических операций, подобных абразивной зачистке.
7.6. Тактильные датчики
Тактильную функцию человека обычно рассматривают с трех позиций: как чувствительность к силовому воздействию, чувствительность к деформации кожи при вибрационном возмущении и как разрешение по полю. При этом чувствительность разных участков кожи может различаться весьма существенно (табл. 7.7). Таблица 7.7. Тактильная чувствительность некоторых участков тела
Участок тела Разрешение по силе, мг по деформации, мкм по полю, мм Нос 5,3 4,7 4 Язык 1 Палец 36 0,07 2 Ладонь 77 0,07 10 Икра 112 5,6 40 Подошва (стопа*) 164 0,65 40 (*) - Разрешение по деформации определяется возбуждением участка площадью в 1 см 2 частотой 200 Гц.
- Для определения пространственного разрешения используется двухточечное возбуждение циркулем.
Тактильные датчики непосредственно реализуют бионическую функцию осязания и предназначены для геометрического распознавания внешней среды при контактном взаимодействии. В общем случае они не входят в состав ССО робота, образуя самостоятельную группу информационных средств. Спектр возможных применений тактильных датчиков весьма широк — от задач обеспечения безопасности при работе со связанными объектами до распознавания образов деталей сложной формы. Применительно к промышленному производству, эти устройства используются, например, в операциях слежения за траекторией при дуговой сварке; извлечения деталей из контейнера и адаптивном захвате хрупких объектов; сборке электронных компонентов (включая вакуумные лампы); обнаружения заеданий в резьбовых соединениях и др.
В робототехнике тактильные датчики были первыми средствами очувствления — еще в 1961 г. Х. Эрнст оснастил ими «механическую руку» MH-1. В 70-е годы сотрудники фирмы IBM П. Вилл и Д. Гроссман создали манипулятор для сборки пишущих машинок, также использующий тактильное очувствление. С тех пор тактильные датчики являются важным средством адаптации роботов, особенно при работе в недетерминированных средах. Как правило, ими оснащается манипулятор и его захватное устройство, а сигналы с датчиков корректируют стратегию движения исполнительного механизма. Необходимость включения тактильных датчиков в контур управления робота предъявляет к ним определенные требования по надежности, быстродействию и точности. Именно невысокая надежность и достаточно большое время обработки информации являются основными препятствиями к более широкому промышленному использованию этих устройств. Поэтому, в настоящее время, тактильные датчики имеют в основном, специальное применение — в задачах дистанционного управления манипуляторами, мобильных робототехнических средствах, устройствах для переноски и складирования и т.д.

С истемы тактильного очувствления робота решают следующие основные задачи: обнаружение контакта инструмента с объектом, определение координат и площади контактного пятна, измерение силы сжатия схвата, определение ориентации объекта в схвате, обнаружение проскальзывания и измерение смещения, распознавание объектов по их тактильному образу.
Как следует из перечня основных задач, тактильные устройства, в отличие от ССО реализуют либо простейшие функции (типа касания), либо более сложные (анализ массивов данных). Это же относится и к датчикам: в первом случае, они строятся с использованием простейших первичных преобразователей, а во втором — на базе сложных информационных устройств, требующих использования алгоритмов распознавания.
Структурно тактильная система также как и силомоментная представляет собой совокупность аппаратно-программных модулей, однако, в отличие от последней, ее датчики не локализованы в некоторой области, а распределены по всей поверхности манипулятора. Особенно густой сетью ЧЭ оснащается захватное устройство робота (рис. 7.26). Здесь уместна бионическая аналогия: на кончиках пальцев человека на 1 см 2 сосредоточено до 135 механорецепторов, причем, порог чувствительности по усилию в некоторых местах (например, на указательном пальце) достигает 0,2 г/мм 2 . Плотность расположения рецепторов в других частях руки на порядок ниже.
Проведенный в 1982 г. по заказу Национального бюро стандартов (США) обзор основных технологических операций в области роботизированного производства позволил сформулировать главные требования к тактильным датчикам роботов, которые актуальны и по сей день:
- разрядность сенсорного поля (количество ЧЭ на 1 кв. дюйм) — не менее 1010;
- время реакции ЧЭ — не более 10 мс;
- рабочий диапазон усилий — 1. 1000 г;
- обязательно малый гистерезис (но необязательно высокая линейность);
- стойкость к воздействию агрессивных сред.
Указанные параметры в первом приближении соответствуют характеристикам пальцев человека.
Тактильные датчики принято классифицировать по следующим признакам:
1. По характеру измеряемых параметров: датчики контактного давления, датчики касания (или датчики бинарного изолированного контакта — они эквивалентны релейному датчику давления, настроенному на определенное значение измеряемого параметра) и датчики проскальзывания.
- По форме входного сигнала: дискретные (релейные) и аналоговые.
7.6.1. Тактильные датчики касания и контактного давления

О диночные тактильные датчики касания и давления размещают на внешних поверхностях захватного устройства. Матрицы этих датчиков устанавливаются преимущественно внутри (на «ладони»). Поскольку контакт ЧЭ матриц с объектом работы происходит сразу во многих точках, то возникает возможность определения формы объекта, его ориентации, а также направление возможного проскальзывания. Самой существенной особенностью тактильные датчики захватного устройства, отличающей их от других информационных устройств робота, является наличие непосредственного контакта с объектом работы. Ударные нагрузки, возникающие при замыкании кинематической цепи манипулятора, агрессивное воздействие внешней среды и т.п. факторы определили особое значение не метрологических, а эксплуатационных требований. Поэтому, наряду с традиционными ЧЭ, используемыми при построении силоизмерительных устройств в тактильных системах широко применяются микропереключатели, а также материалы на базе электропроводных полимеров и углеродных волокон. Ведутся разработки новых технологий, позволяющих получать износо- и термостойкие тензочувствительные материалы.
Наибольшее распространение в промышленности нашли дискретные тактильные датчики. Они обладают релейной функцией преобразования и служат для фиксации факта контакта исполнительного механизма с объектом или препятствием. Дискретные датчики явились первыми тактильными средствами и устанавливались на внутренних сторонах пальцев захватного устройства, с целью определения наличия или отсутствия объекта в зоне захвата. В качестве ЧЭ таких датчиков применялись микропереключатели (в отечественных моделях — МП 5, МП 12) или герконы (КЭМ 1, КЭМ 2). На рис. 7.27а представлен пример простого тактильного датчика на основе микропереключателя.
Другая схема этого типа использовалась в системе очувствления подводного манипулятора Curv. Здесь перемещение любого «уса» на расстояние, большее 0,01 мм деформирует упругую полусферу, вызывает смещение магнита и замыкание геркона (рис. 7.27б). Дискретные тактильные датчики характеризуются малыми усилиями срабатывания, не превышающими 0,15 . 0,20 Н.

В последнее время все чаще используются матрицы из дискретных тактильных датчиков. Пример матрицы размерностью 88 элементов приведен на рис. 7.28 а. УЭ матрицы представляют собой 64 полусферические стальные мембраны с межцентровым расстоянием 2,5 мм. Такая мембрана имеет два устойчивых положения — выпуклое и вогнутое, причем выпуклое положение удерживается избыточным давлением воздуха. Координаты касания вычисляются с помощью контроллера и коммутатора, поочередно опрашивающего все элементы матрицы (рис. 7.28б). Порог срабатывания составляет 0,2 . 0,5 Н.
Все дискретные тактильные устройства обладают тремя существенными недостатками: во-первых, ограниченным ресурсом работы, во-вторых, невозможностью определения величины контактного усилия, и, в-третьих, неточностью локализации места контакта. Модель мягкой, усеянной рецепторами кожи вдохновляла многих экспериментаторов на создание соответствующих заменителей — «искусственных кож », в том числе на основе эластомеров (баристоров), PVF2 -пленок и композитных материалов с волокном из графита.

П ервой схемой аналогового «распределенного» тактильного датчика явилась разработка француза Ж. Кло, предложившего в качестве ЧЭ использовать электропроводящий силиконовый каучук. На рис. 7.29а представлена схема датчика из этого материала. Преобразователь состоит из двух проволочных пластин — электродов, с взаимно перпендикулярным расположением проводников. Пластины разделены слоем силиконового каучука толщиной 200 мкм. Контактные точки в местах пересечения проводников образуют аналоговые ЧЭ. Ток через ЧЭ определяется локальной проводимостью эластомера, пропорциональной приложенному усилию. Действительно, при отсутствии давления на датчик площадь контактного пятна мала, его сопротивление велико и ток через ЧЭ практически отсутствует. При сжатии, сопротивление пятна уменьшается и ток возрастает. Недостатком эластомерных конструкций является нелинейная функция преобразования (рис. 7.29б) и существенный гистерезис. Для улучшения метрологических характеристик применяется предварительное двухстороннее поджатие эластомера пластинами-электродами. Этот принцип использовался в «искусственной коже» К. Бейтси, а также в промышленных тактильных матрицах. Первой успешной промышленной разработкой явилась матрица LTS-200 фирмы Lord Corp. (США) размерностью (128), межцентровым расстоянием 2,5 мм и диапазоном изменения сопротивления 100 . 5000 Ом. В качестве несущей конструкции матрицы используются металлические элементы. Дальнейшим развитием идеи эластомерных тактильных датчиков явилось создание БИС тактильной матрицы, выполненной по n-МОП технологии. Подложка содержит двумерный массив ячеек, размером 1,60,9 мм, поверх которого уложен слой электопропроводящей пластмассы, толщиной 0,5 мм. В данной конструкции реализована концепция «интеллектуализации» сенсорной функции, и структурно она представляет собой тактильную систему с устройствами съема и обработки данных. Ядром системы является внутрикристальный процессор, выполняющий опрос локальных ячеек, формирование двоичного кода тактильного образа, а также выделение тактильного контура, на основе алгоритмов свертки. Рассмотренный датчик размерностью 2525 ЧЭ при размере одной ячейки 11 мм, имеет суммарную площадь 6,3 см 2 .