44.Асинхронные электрические машины. Принцип действия асинхронного двигателя.
Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин — индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую.
Достоинства:Лёгкость в изготовлении.Отсутствие механического контакта со статической частью машины.
Недостатки:Небольшой пусковой момент.Значительный пусковой ток.
Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из пластин электротехнической стали.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в них ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создает вращающий электромагнитный момент, заставляющий ротор вращаться.
Наибольшее распространение среди электрических двигателей Получил трехфазный асинхронный двигатель, впервые сконструированный известным русским электриком М. О. Доливо-Добровольским.
Асинхронный двигатель отличается простотой конструкции Щ несложностью обслуживания. Как и любая машина переменного тока асинхронный двигатель состоит из двух основных частей; статора и ротора. Статором называется неподвижная часть машины, ротором — ее вращающаяся часть. Асинхронная машина обладает свойством обратимости, т. е. может быть использована как в режиме генератора, так и в режиме двигателя. Из-за ряда существенных недостатков асинхронные генераторы практически почти не применяются, тогда как асинхронные двигатели, как это было отмечено выше, получили очень широкое распространение.
Поэтому мы будем рассматривать работу асинхронной машины в режиме двигателя, т. е. процесс преобразования электрической энергии в энергию механическую.

Многофазная обмотка переменного тока создает вращающееся магнитное поле, скорость вращения которого в минуту
Если ротор вращается со скоростью п2, равной скорости вращения магнитного поля (n2=n1), то такая скорость называется синхронной.
Если ротор вращается со скоростью, не равной скорости вращения магнитного поля < n2n1), то такая скорость называется асинхронной.
В асинхронном двигателе рабочий процесс может протекать только при асинхронной скорости, т. е. при скорости вращения ротора, не равной скорости вращения магнитного поля.
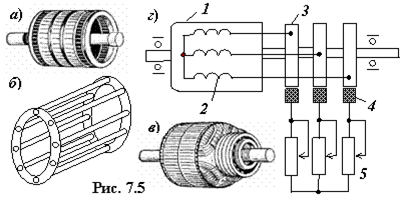
Скорость ротора может очень мало отличаться от скорости юля, но при работе двигателя она будет всегда меньше (n2 Работа асинхронного двигателя основана на явлении, названии диск Араго-Ленца (рис. 108). Это явление заключается в следующем: если перед полюсами постоянного магнита поместить медный диск 1, свободно сидящий на оси 2, и начать вращать магнит круг его оси при помощи рукоятки, то медный диск будет вращаться в том же направлении. Это объясняется тем, что при вращении магнита магнитные линии его поля, замыкаясь от северного полюса с южному, пронизывают диск и индуктируют в нем вихревые токи, 3 результате взаимодействия вихревых токов с магнитным полем магнита возникает сила, приводящая диск во вращение. На основании закона Ленца направление всякого индуктированного тока таково, что он противодействует причине, его вызвавшей. Поэтому вихревые токи в теле диска стремятся задержать вращение магнита, но, не имея возможности сделать это, приводят диск во вращение так, что он следует за магнитом. При этом скорость вращения диска всегда меньше, чем скорость вращения магнита. Если бы эти скорости почему-либо стали одинаковыми, то магнитные лиши не пересекали бы диска и, следовательно, в нем не возникали 5ы вихревые токи, т. е. не было бы силы, под действием которой диск вращается. В асинхронных двигателях постоянный магнит заменен вращаюйся магнитным полем, создаваемым трехфазной обмоткой статора при включении ее в сеть переменного тока. Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуктирует в них э.д. с. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то по ней под действием индуктируемой э. д. с. протекает ток. В результате полем обмотки статора создается вращающий момент, под действием которого ротор начинает вращаться. Например, выделим часть окружности ротора, на которой находится один проводник его обмотки. Поле статора представим северным полюсом N, который вращается в пространстве и вокруг ротора по часовой стрелке с числом оборотов N в минуту. Следовательно, полюс N перемещается относительно проводника обмотки ротора слева направо, в результате чего в этом проводнике индуктируется э.д. с, которая согласно правилу правой руки направлена на зрителя (знак «точка»). Если обмотка ротора замкнута, то под действием э. д. с. по этой обмотке течет ток, направленный в выбранном нами проводнике также на зрителя. В результате взаимодействия тока в проводнике обмотки ротора с магнитным полем возникает сила F, которая перемещает проводник в направлении, определяемом по правилу левой руки, т. е. слева направо. Вместе с проводником начинает перемещаться и ротор. Если силу F, действующую на проводник обмотки ротора, умножить на расстояние этого проводника от оси ротора (плечо приложения силы), то получим вращающий момент, развиваемый током данного проводника. Так как на роторе помещено большое количество проводников, то сумма произведений сил, действующих на каждый из проводников, на расстояния этих проводников от оси ротора определяет вращающий момент, развиваемый двигателем. Под действием вращающего момента ротор приходит во вращение по направлению вращения магнитного поля. Следовательно, для реверсирования двигателя, т. е. для изменения направления вращения ротора, необходимо изменить направление вращения магнитного поля, созданного обмоткой статора. Это достигается изменением чередования фаз обмоток статора; для чего следует поменять местами по отношению к зажимам сети любые два из трех проводов, соединяющих обмотку статора с сетью. Реверсивные двигатели снабжаются переключателями, при помощи которых можно изменять чередование фаз обмоток статора, а следовательно, и направление вращения ротора. Вне зависимости от направления вращения ротора его скорость n2, как уже указывалось, всегда меньше скорости магнитного поля статора. Если предположить, что в какой-то момент времени число оборотов ротора оказалось равным числу оборотов поля статора, то проводники обмотки ротора не будут пересекаться магнитными линиями поля статора и тока в роторе не будет. В этом случае вращающий момент станет равным нулю, скорость вращения ротора уменьшится по сравнению со скоростью вращения поля статора, пока не воз никнет вращающий момент, уравновешивающий тормозной момент который складывается из момент; нагрузки на валу и момента сил трения в машине. В теме 7 рассмотрено: назначение, устройство и принцип действия асинхронных двигателей (АД), схемы замещения фаз статора и ротора двигателей, их механические и рабочие характеристики. Изложены способы пуска в ход и регулирования частоты вращения АД. Дидактические единицы: 7.1. Назначение, устройство и принцип действия АД. 7.2. Скольжение и частота вращения ротора АД. 7.3. Схема замещения АД и ее векторная диаграмма. 7.4. Электромагнитный момент, механическая и рабочие характеристики АД. 7.5. Пуск в ход и регулирование частоты вращения АД. Асинхронные электрические двигатели ¾ это машины переменного тока, у которых частота вращающегося магнитного поля статора и частота вращения ротора не совпадают. Асинхронные двигатели (АД) преобразуют электрическую энергию в механическую и являются потребителями электрической энергии (рис. 7.1а). Первый асинхронный двигатель был сконструирован в 1889 г. русским инженером М. О. Доливо-Добровольским. Асинхронные трёхфазные двигатели ¾ самые распространённые из всех видов электрических машин. Это объясняется тем, что они просты по конструкции, дёшевы, надежны в работе, имеют высокий КПД при номинальной нагрузке, выдерживают значительные перегрузки, не требуют сложных пусковых приспособлений. Наряду с преимуществами АД имеют ряд недостатков, основными из которых являются: низкий коэффициент мощности (соsφ0) при неполной нагрузке (при ХХ соsφ0 = 0,2—0,3), большой пусковой ток, низкий КПД при малых нагрузках, относительная сложность и неэкономичность регулирования их эксплуатационных характеристик и, в первую очередь, механических характеристик. Асинхронные двигатели с короткозамкнутым (КЗ) (серии АК, рис. 7.1б) и с фазным (серии АО, рис. 7.1в) роторами разрабатывались и выпускались в нашей стране в виде единых серий: А, АО (1949—1951 годы), А2, АО2 мощностью 0,6—100 кВт (1958-1960 годы), А, АК (100—1000 кВт, 1952—1956 годы), А2, АК2 (100—1000 кВт, 1964—1965 годы), А3, АО3 (132—500 кВт), 4А и АИ (АИР) (0,06—400 кВт до настоящего времени). В последние годы в России освоен выпуск новых серий асинхронных двигателей: RА (0,37. 100 кВт), 5А (0,37. 400 кВт) и 6А. Выпускаются также АД большой мощности с КЗ ротором серий АТД4, А4, ДА и др. (500. 8000 кВт) на напряжения 6 кВ и 10 кВ и синхронные частоты n1 вращения 1500, 750, 600 и 500 об/мин, и с фазным ротором серий АОК2, АОК (200. 500 кВт), АКСБ (600. 1000 кВт), ВАК3 (1600 и 3400 кВт, n1 = 1000 об/мин) на напряжение 6 кВ, и микродвигатели серий АИР, УАД, 5АЕУ и др. мощностью до 600 Вт. 7.1.1. Устройство АД. Основными частями АД являются статор (неподвижная часть машины) и ротор (подвижная часть), отделённые друг от друга воздушным зазором (0,3—0,5 мм и до 1,5-2 мм у высоковольтных машин большой мощности). Их сердечники собраны из листов электротехнической стали. На внутренней части поверхности статора и на внешней ротора выштампованы пазы, в которые уложены обмотки. Сердечник статора помещен в корпус, который является внешней частью двигателя. Сердечник ротора укреплён непосредственно на валу двигателя или на ступице, надетой на вал. Обмотка статора обычно выполняется трёхфазной, состоящей из трёх самостоятельных катушек, сдвинутых в пространстве одна относительно другой на 120° (рис. 7.2). Обмотка статора обычно выполняется трёхфазной, состоящей из трёх самостоятельных катушек, сдвинутых в пространстве одна относительно другой на 120° (рис. 7.2). В двигателях низкого напряжения (до 1000 В) концы каждой фазы обмотки статора присоединены к клеммам, которые расположены на щитке, укреплённом на корпусе двигателя, и обозначены соответственно: С1−С4 (фаза А), С2−С5 (фаза В) и С3−С6 (фаза С) (рис. 7.3). Это даёт возможность в зависимости от величины напряжения сети (например, 380 или 220 В) соединять обмотку статора звездой (рис. 7.3а) или треугольником (рис. 7.3б) для того, чтобы в обоих случаях фазное напряжение обмотки было номинальным (в данном примере равным 220 В). 7.1.2. Вращающееся магнитное поле (в. м. п.) статора. При подключении двигателя к трехфазной сети в обмотках статора протекают токи ia, ib и ic (рис. 7.4а). МДС каждой обмотки создаёт магнитный поток, вектор которого совпадает с осью соответствующей катушки. Если ток ia = Im, то ток ib = ic = Im/2 (при t = t1, рис. 7.4а). При этом вектор результирующего магнитного потока Фmp = Фma + Фmb + Фmc совпадает с осью катушки С1 − С4 (фаза А) (рис. 7.4б). В моменты времени t = t2 и t = t3 (см. рис. 7.4a) результирующий вектор Фmp будет совпадать с осями катушек соответственно С2 − С5 (фаза В) и С3 − С6 (фаза С) (рис. 7.4в). Очевидно, что за один период Т изменения напряжения сети (см. рис. 7.4а) вектор Фmp результирующего магнитного поля сделает один оборот. Таким образом, МДС трёх обмоток статора, расположенных в пространстве под углом 120° друг к другу, при подключении их к трёхфазной сети синусоидального тока создают в. м. п., аналогичное по форме магнитному полю вращающегося двухполюсного магнита (с одной парой р полюсов) с подобным распределением магнитной индукции на полюсах. В общем случае частота вращения n1 в. м. п. (называемая синхронной частотой вращения в. м. п. статора) зависит от частоты напряжения сети f1 и числа пар р полюсов, определяемого числом катушек статора, т.е. Так как число пар полюсов р натурального ряда (р = 1, 2, 3, 4 и т.д.), то при f1 = 50 Гц возможны следующие значения n1: 3000, 1500, 1000, 750 об/мин и т.д., т.е. для двухполюсной машины (при трёх статорных катушках р = 1) n1 = 60f1 = 3000 об/мин; для четырёхполюсной машины (при шести статорных катушках р = 2) n1 = 60f1/р = 60×50/2 = 1500 об/мин и т.д. 7 .1.3. Устройство обмоток роторов АД. Обмотка ротора может быть выполнена короткозамкнутой (КЗ) или фазной. КЗ обмотка ротора (рис. 7.5а) выполняется в виде беличьей клетки, состоящей из алюминиевых или медных (латунных) стержней и замыкающих их на торцах колец (рис. 7.5б). У АД с фазным ротором (рис. 7.5в) одни концы обмоток 2 ротора соединяются с контактными кольцами 3, расположенными на валу двигателя, а другие соединены в общую точку (рис. 7.5г). Контактные латунные кольца 3 соединяются с клеммами пускового реостата 5 с помощью угольных или меднографитовых щёток 4 и щёткодержателей. Понятие асинхронной машины связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора. Буква «а» здесь играет как бы роль отрицания или нестрогого следования ротора за синхронно вращающимся магнитным полем статора. Создателем этой простой по конструкции, но удобной и надежной в работе машины является русский инженер М.О. Доливо-Добровольский. Асинхронный двигатель, впервые разработанный в 1889 году, практически не подвергся серьезным изменениям до наших дней. В основу конструкции асинхронного двигателя положено создание системы трехфазного переменного тока принадлежащее этому же автору. Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле. Основными конструктивными элементами асинхронного двигателя являются неподвижный статор и подвижный ротор (рис. 5.1.1). Статор и ротор разделены воздушным зазором от 0,1 мм до 1,5 мм. Пакет статора c целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали. На внутренней полости статора имеются пазы, в которые укладываются провода обмотки. Листы статора перед сборкой в пакет изолируют слоем лака или окалины, полученной при их отжиге. В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек — фаз, сдвинутых в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины. В зависимости от типа обмотки роторы двигателей обычного исполнения делятся на короткозамкнутые и фазные. Обмотка короткозамкнутого ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти стержни замыкаются кольцами. Соединения стержней с кольцами осуществляется пайкой или сваркой (рис. 5.1.2). Чаще всего короткозамкнутую обмотку выполняют расплавленным алюминием и литьем под давлением. При этом вместе со стержнями и кольцами отливаются и лопатки вентилятора. Двигатели большой мощности имеют на роторе фазную обмотку. Конструкция ее аналогична обмотке статора. Концы этой обмотки выведены на контактные кольца. С помощью этих колец и токосъемных щеток к обмотке ротора подключают дополнительные сопротивления. На статоре трехфазного двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода (рис. 5.2.1.). Используя график изменения трехфазного тока, проставим на нем несколько отметок времени; tl, t2, t3. tn. Наиболее удобными будут отметки, когда один из графиков пересекает ось времени. Теперь рассмотрим электромагнитное состояние обмоток статора в каждые из принятых, моментов времени. Рассмотрим вначале точку t1. Ток в фазе А равен нулю, в фазе С он будет положительным — (+) , а в фазе В — отрицательным (·) (рис. 5.2.2, а). Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки В-У будет иметь противоположный знак, т.е. У — (+), а конец Z обмотки C-Z — (·). Известно, что вокруг проводника с током всегда образуется магнитное поле. Направление его определяется правилом правоходового винта («буравчика»). Проведем силовую магнитную линию вокруг проводников С и У и, соответственно, В и Z (см. штриховые линии на рис. 5.2.2 a). Рассмотрим теперь момент времени t2. В это время тока в фазе В не будет. В проводнике А фазы А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (·). Теперь проставим знаки: в проводнике Х — (·), а в проводнике Z — (+). Проведем силовые линии магнитного поля в момент времени t2 (рис. 5.2.2,б). Заметим при этом, что вектор совершил поворот. Аналогичным образом проведем анализ электромагнитного состояния в фазных обмотках статора в момент времени t3,…tn (рис. 5.2.2, б, в, г, д). Из рисунков 5.2.2 наглядно видно, что магнитное поле в обмотках и его поток Ф совершают круговое вращение. Частота вращения магнитного поля статора определяется следующей формулой: где f — частота тока питающей сети, Гц; p — число пар полюсов. Если принять f=50 Гц, то для различных чисел пар полюсов (р=1, 2, 3, 4, ) n1=3000, 1500, 1000, 750, об/мин. Электрическими двигателями называют механизмы, предназначенные для преобразования электрической энергии в механическое движение. Электромоторы сопровождают человека практически во всех сферах его деятельности. Без них невозможно представить современную жизнь. Несмотря на надежность и долговечность, все же случаются поломки и сбои в работе таких устройств. Знание характеристик, особенностей поможет правильно выбирать, обслуживать и при необходимости ремонтировать асинхронные двигатели. В асинхронных двигателях переменного тока (АД) частота вращения ротора не синхронизирована с частотой магнитного поля, индуцируемого током обмотки статора. От этого принципа произошло определение этой группы электромашин. В синхронных электрических машинах частоты совпадают. В настоящее время разработано и применяется множество различных разновидностей АД, которые различаются конструктивно и по характеристикам. Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД. АД распространены очень широко, и являются самым популярным типом электромашин. Асинхронные электродвигатели используют в компрессорах, системах водоснабжения, отопления, кондиционирования, автомобилестроении. Особенно востребованы такие устройства в областях, где требуется точно выдерживать скорость вращения вала, например при производстве полимеров, стеклотканей, проволоки. Относительно маломощные однофазные агрегаты работают в вентиляторах, маломощной бытовой технике. Более производительные двухфазные агрегаты популярнее, их применяют в приводах стиральных машин, холодильников, иных приборов. Значительно шире используются трехфазные асинхронные электромашины, в первую очередь в промышленности. Ими оснащают электроприводы станков, подъемных кранов, лифтов, многого другого. Этому способствуют надежность и экономичность электродвигателей. Асинхронный электродвигатель состоит из двух основных узлов: неподвижного статора и вращающегося вокруг своей оси ротора. Статор представляет собой стандартную конструкцию, где сердечник выполнен как полый цилиндр, изготовленный из стальных пластин, изолированных друг от друга. В расположенных на внутренней окружности открытых пазах уложена первичная обмотка, на которую подается напряжение электрической сети. Внутри статора расположен ротор, опирающийся на вал через подшипники. Сами подшипники с обеих сторон закрыты фиксирующими их крышками. Весь агрегат помещается в металлический корпус. У асинхронных двигателей средней и высокой мощности для более эффективного охлаждения в корпусе предусмотрены ребра, а также вентилятор на валу. Предусмотрена клеммная коробка, куда выводятся концы обмоток. Ротор может быть двух типов: короткозамкнутым и фазным. Конструктивно они различаются, соответственно асинхронные двигатели принадлежат к одной из двух групп по типу ротора. Конструкция такого ротора предельно проста. Сердечник выполнен из штампованных листов, а роль вторичной обмотки играет набор параллельных друг другу металлических стержней, торцы которых замкнуты между собой стальными кольцами. Механизм напоминает беличье колесо. Обмотки статора расположены под углом 120°. Если подать на них переменное напряжение со сдвигом 120°, внутри возникает вращающееся магнитное поле. Если поместить эту самую беличью клетку внутрь вращающегося поля, его силовые линии будут пересекать проводники ротора, и наводить в них электродвижущую силу, а соответственно появятся токи. В результате там создается собственное магнитное поле, которое будет взаимодействовать с вращающимся полем, входить с ним в «зацепление». Это означает, что ротор начинает вращаться в ту же сторону, что и магнитное поле статора. Частота вращения ротора всегда меньше, чем частота поля статора. Если он «догонит» частоту статора, ЭДС наводиться не будет, вращающий момент станет равным нулю, и электродвигатель перестанет работать. В этом эффекте и кроется смысл асинхронности. Относительная величина отставания, выраженная в условных единицах, называется скольжением. Этот параметр зависит от характеристик ротора, в том числе его сопротивления. Асинхронные двигатели с короткозамкнутым ротором не имеют подвижных контактов, их узлы проще, благодаря чему надежны и долговечны. Применяются в системах, не требующих регулировки скорости вращения, поскольку она затруднена, конструкция усложняется. Фазный ротор по конструкции незначительно отличается от статора. Сердечник состоит из набора изолированных пластин, изготовленных из электростатической стали и закрепленных на вале. Между пластинами предусмотрены пазы, ориентированные вдоль продольной оси. В них укладываются витки вторичной обмотки, ее называют фазной. Число фаз обмоток статора и ротора должно быть одинаковым. Электрические цепи ротора подключается тремя контактными кольцами, на которых закреплены концы обмотки. Фазы соединяются звездочкой или треугольником. В двухполюсном асинхронном двигателе оси обмоток смещены друг относительно друга на 120°. Предусмотрена возможность подключения дополнительного внешнего сопротивления для улучшения пусковых характеристик. Обычно используется реостат со ступенчатой регулировкой. Двигатель в такой конфигурации набирает обороты тоже ступенчато. При достижении оптимальных оборотов реостат отключается путем закорачивания токосъемных колец. Электродвигатели с короткозамкнутыми роторами характеризуются следующими достоинствами: Отмечают более высокий КПД и легкую автоматизацию. В то же время данный тип электрических моторов имеет и недостатки, основной из которых — сложная регулировка скорости. Поэтому такая конструкция применяется в системах с постоянной скоростью вращения электродвигателя. Помимо этого, недостатками считают большой ток и недостаточное усилие при пуске. Электромоторы с фазным ротором уступают короткозамкнутым по потерям мощности из-за более сложной конструкции. Их применяют при необходимости регулировки скорости, уменьшении пускового тока и увеличении крутящего момента в момент старта. Запуск электромотора должен происходить с минимальным скачком тока в обмотках. Для этого применяется 5 основных способов подключения: Для однофазных версий используют расщепление полюсов, конденсаторный или резисторный пуск. Трехфазные электродвигатели запускаются или напрямую, переключением на треугольник, или посредством преобразователя напряжения, будь то реостат, трансформатор. Применяют изменение числа пар полюсов. Регулировать частоту вращения асинхронного двигателя не так просто. Существуют 3 возможности. Можно изменить: Чтобы изменить число пар полюсов нужно специальным образом заложить обмотку статора. Дальнейшие действия заключаются в возможности переключаться на одну, две или три пары полюсов. Такое переключение будет ступенчатым. Соответственно, дискретно будет меняться и частота вращения ротора асинхронного двигателя. В многополюсных обмотках статора частота выше. Второй способ — изменить скольжение. Его величина зависит, в том числе, и от сопротивления. Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей. Однако эти способы не очень экономичны или неудобны. С развитием силовой электроники появился третий, самый действенный способ — изменять частоту питающей сети, для чего служат частотные преобразователи. При плавном изменении частоты питающего тока можно получить непрерывный ряд частот магнитного поля статора асинхронного двигателя в определенном диапазоне, а значит так же плавно изменять скорость вращения вала. Силовая электроника дала АД новый толчок в развитии, их доля превышает 80% всех электродвигателей в мире. Одним из достоинств асинхронного двигателя с фазным ротором является высокий пусковой момент, тогда как короткозамкнутые роторы такого преимущества не обеспечивают. Об этом говорит его механическая характеристика. В момент пуска токи достигают 5 –7 значений номинальной величины, а произведение силы тока на магнитный поток и дает момент вращения. Если представить, что ротор конструктивно устроен в виде двух беличьих колес разного диаметра, вставленных друг в друга, то в момент пуска первоначальный момент будет приложен к внешнему колесу большего диаметра. Происходит это из-за явления вытеснения тока на высокой частоте, он называется скин-эффект. При двыхполюсной катушке, частоте сети 50 Гц, магнитное поле ротора развивает угловую скорость 3 тыс. об/мин. Скин-слой при этом составляет 9 мм. В многополюсных машинах этот слой больше. Поэтому, при пуске ток вытесняется наружу, и за счет более длинного рычага возрастает момент. Когда электрическая машина набирает номинальные обороты и переходит в двигательный режим, скин-эффект нивелируется. С ростом частоты вращения ротора падает частота индукции в обмотке. Тогда ток идет уже по внутренней части. По этому принципу и обеспечивается высокая тяга на пуске. В реальной практике в асинхронных двигателях с повышенным пусковым моментом скин-эффект обеспечивается за счет формирования глубокого паза в фазном роторе. Ток распределяется в разные моменты времени по глубине паза в разных областях. При пуске ток концентрируются во внешней части, потом когда двигатель раскручивается, скин-эффект исчезает. Ток перераспределяется в глубину паза, рабочий вращающий момент становится меньше. Это означает, что в устоявшемся двигательном режиме АД значительно экономичнее, частые старты повышают затраты. Генераторы предназначены для преобразования механической энергии вращения в электроэнергию. Если вращать ротор асинхронного двигателя и достигнуть частоты вращения поля статора, ток перестанет наводиться, и вращающий момент не будет создаваться. Если приложить внешнюю силу и продолжить вращать этот ротор по направлению поля с еще более высокой частотой вращения, в роторе начнет вновь начнет наводиться ЭДС, но противоположного направления. Электрический ток будет идти в другую сторону, не как в двигательном режиме. Эти токи будут наводить противоЭДС в обмотке статора. В ней будет создаваться ток. Такая конструкция является асинхронным генератором. Если асинхронный двигатель включить в сеть, а потом начать вращать его ротор быстрее, чем частота поля статора в том же направлении, то возникнет генерация в сеть. При этом асинхронный двигатель будет потреблять из сети реактивную энергию для создания магнитного поля, а выдавать активную энергию. Пример — знаменитые электромобили «Tesla» первого поколения. Их оснащали современным инновационным асинхронным преобразователем энергии. Он работал как в режиме двигателя на разгоне, так и в режиме генератора при рекуперативном торможении, когда электроэнергия через инвертор поступает на зарядку батареи. Асинхронные генераторы принадлежат к группе приборов, вырабатывающих переменный ток разной частоты. В схему включают инвертор, где ток преобразуется в постоянный. Затем снова в переменный, но уже с точно заданной частотой сети — 50 герц. АД, благодаря своим качествам, снискали высокую популярность. К несомненным преимуществам таких устройств относят: Благодаря сдвигу фаз не требуются дополнительные устройства и преобразователи для формирования крутящего момента. Не последнюю роль играют малые потери. КПД при работе с максимальной нагрузкой может достигать 97 % благодаря минимальному количеству узлов. Как и всем устройствам, асинхронным преобразователям присущи недостатки. Среди них: Современные механические и электротехнические конструктивные решения почти полностью нивелируют эти недостатки. И все же, несмотря на все достоинства, ресурс асинхронных электрических моторов не вечен. Бывают проскальзывания ротора относительно вала, замыкания обмоток, обрывы, повреждения корпуса, износ подшипников, другие неисправности. Все это проявляет себя падением мощности, посторонними звуками и запахами, а то и полным отказом. Приобретать новый агрегат бывает накладно, да и не всегда имеет смысл. В подавляющем большинстве случаев рациональнее устранить неисправность и продолжить эксплуатацию электрического двигателя. Ремонтом электромоторов любого типа и мощности в Санкт- Петербурге занимается компания «Хельд Вэй». Оперативно и качественно выполняются все работы по восстановлению работоспособности электромоторов независимо от сложности. Каждая отремонтированная электрическая машина проходит испытания, чтобы убедиться в соответствии параметров требованиям к новому агрегату. На работу предоставляются скидки, гарантии. Текущий ремонт возможен по месту эксплуатации, с выездом мастеров. Капитальный и ремонт средней степени производятся на территории предприятия. Имеются запчасти и комплектующие.
Тема 7 асинхронные двигатели
Установочная лекция 9 (2 ч)
7.1. Назначение, устройство и принцип действия ад
Лекция 15. (4часа) асинхронные машины
1. Общие сведения и конструкция асинхронного двигателя


2. Принцип образования трехфазного вращающегося магнитного поля



Что такое асинхронный двигатель, устройство и принцип действия асинхронного двигателя
Виды асинхронных двигателей
Область применения асинхронных двигателей

Как устроен АД
Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с фазным ротором
Особенности разных типов роторов
Способы подключения
Как обеспечивается регулировка скорости
Как обеспечивается высокий пусковой момент
Асинхронный преобразователь энергии как генератор
Преимущества и недостатки асинхронных двигателей