8.Электромагнитный момент, развиваемый якорем машины постоянного тока.
Электромагнитный момент Мэм, вызванный взаимодействием магнитного потока и тока якоря, отличается от момента М, развиваемого машиной на валу, вследствие трения в подшипниках, вращающегося якоря о воздух и вентиляционных потерь. Так как указанные два момента отличаются незначительно, будем в дальнейшем считать их равными и обозначать М.
Уравнение моментов машин постоянного тока.
Основной характеристикой двигателя постоянного тока, определяющей его свойства в установившемся режиме, является механическая характеристика.
 при
при  и
и .
.
Уравнение механической характеристики получается


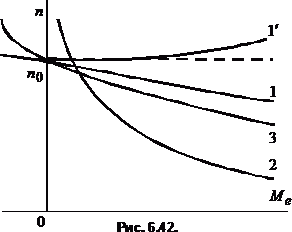
На рис. 6.42 представлены механические характеристики при различных способах возбуждения. Механическая характеристика двигателя параллельного возбуждения при небольшой размагничивающей реакции якоря () имеет слабо падающий характер (кривая 1). Если размагничивающая реакция двигателя параллельного возбуждения велика (потокФ существенно снижается при увеличении нагрузки), то механическая характеристика будет иметь положительный наклон (кривая 1′). Такая характеристика, как правило, не позволяет получить установившийся режим.
Действительно, запишем уравнение моментов в малых приращениях
Решение этого уравнения

где С — постоянная, определяемая начальными условиями;
 — разность частных производных электромагнитного и внешнего моментов. Решение будет устойчивым (
— разность частных производных электромагнитного и внешнего моментов. Решение будет устойчивым ( при
при  ), если
), если  , т.е.
, т.е.  . Для постоянной нагрузки
. Для постоянной нагрузки  характеристика 1′ не удовлетворяет этому условию. В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,
характеристика 1′ не удовлетворяет этому условию. В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,  , а электромагнитный момент пропорционален квадрату тока якоря,
, а электромагнитный момент пропорционален квадрату тока якоря,  . С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид
. С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид  .
.
Этому уравнению соответствует кривая 2 (рис. 6.42), имеющая гиперболический характер. При  частота вращения якоря
частота вращения якоря  , поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода. Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока
, поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода. Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока  . Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе (
. Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе ( ) двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы. Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 6.42) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при
) двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы. Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 6.42) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при  (рис. 6.42), так как машина переходит в генераторный режим (
(рис. 6.42), так как машина переходит в генераторный режим ( ). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.
). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.
ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ МАШИНЫ ПОСТОЯННОГО ТОКА
При работе машины в обмотке якоря возникает ток, который взаимодействует с магнитным потоком возбуждения. В результате на каждый активный проводник действует электромагнитная сила FM = ВЦ, направление которой определяется правилом левой руки. Все силы одинаково направлены и совпадают с касательными к окружности якоря.
На рисунке 7.5.1 в сечениях проводников якорной обмотки отмечены направления токов.

Но не все электромагнитные силы будут одинаковыми. Ранее указывалось, что магнитная индукция в разных точках поверхности якоря различна. Поэтому воспользуемся опять средним значением магнитной индукции и найдем среднее значение силы Fcp, действующей на каждый проводник длиной /:

Найдем среднее значение момента, создаваемого одним проводником:

где D — диаметр якоря.
Но лО = 2рт, поэтому т = ^~.
Подставляя значение т, получим М — -Р- .
Обозначая полный ток якоря через /я найдем ток в одном про воднике:

где 2 а — число параллельных цепей.
Если якорь имеет z проводников, то полный электромагнитный момент


где См = ——постоянная для данной машины величина.
Таким образом, электромагнитный момент, развиваемый якорем, пропорционален магнитному потоку полюса и току якоря. В двигателях этот момент является вращающим, а в генераторах — противодействующим.
РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА ПРИ НАГРУЗКЕ. РЕАКЦИЯ ЯКОРЯ
При взаимодействии тока /я с магнитным полем возникает электромагнитная сила. Из рис. 5.1 следует, что при установке щеток на поперечной оси на все N проводников обмотки якоря эти силы будут действовать в одну сторону. Тогда сила, действующая на z-й проводник и развиваемый ей момент будут
где — магнитная индукция в точке расположения z-го проводника.
Так как длина всех проводников одинакова и через них протекает один и тот же ток 1а, то электромагнитный момент, развиваемый машиной, будет
Если, как и при выводе выражения для ЭДС, принять, что магнитная индукция во всех точках полюсного деления т равна В6ср (рис. 5.15), то У B&j = N • ВАср. Поскольку л/) — МДС Fx/x уменьшается, т. к. линия поля охватывает часть проводников с противоположным направлением тока. Распределение поперечной МДС якоря показано на рис. 5.18, б.
Поперечную МДС якоря F можно представить в виде двух составляющих, одна из которых (Г&ї) равна магнитному напряжению воздушного зазора 5Х, а другая (Х^, ) — сумме магнитных напряжений ферромагнитных участков магнитной цепи:
л qx 5x / j CT
Предположим, что магнитная система машины не насыщена, т. е.
8.Электромагнитный момент, развиваемый якорем машины постоянного тока.
Электромагнитный момент Мэм, вызванный взаимодействием магнитного потока и тока якоря, отличается от момента М, развиваемого машиной на валу, вследствие трения в подшипниках, вращающегося якоря о воздух и вентиляционных потерь. Так как указанные два момента отличаются незначительно, будем в дальнейшем считать их равными и обозначать М.
Уравнение моментов машин постоянного тока.
Основной характеристикой двигателя постоянного тока, определяющей его свойства в установившемся режиме, является механическая характеристика.

 при
при  и
и .
.
Уравнение механической характеристики получается


На рис. 6.42 представлены механические характеристики при различных способах возбуждения. Механическая характеристика двигателя параллельного возбуждения при небольшой размагничивающей реакции якоря () имеет слабо падающий характер (кривая 1). Если размагничивающая реакция двигателя параллельного возбуждения велика (потокФ существенно снижается при увеличении нагрузки), то механическая характеристика будет иметь положительный наклон (кривая 1′). Такая характеристика, как правило, не позволяет получить установившийся режим.
Действительно, запишем уравнение моментов в малых приращениях

Решение этого уравнения

где С — постоянная, определяемая начальными условиями;
 — разность частных производных электромагнитного и внешнего моментов. Решение будет устойчивым (
— разность частных производных электромагнитного и внешнего моментов. Решение будет устойчивым ( при
при  ), если
), если  , т.е.
, т.е.  . Для постоянной нагрузки
. Для постоянной нагрузки  характеристика 1′ не удовлетворяет этому условию. В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,
характеристика 1′ не удовлетворяет этому условию. В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,  , а электромагнитный момент пропорционален квадрату тока якоря,
, а электромагнитный момент пропорционален квадрату тока якоря,  . С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид
. С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид  .
.
Этому уравнению соответствует кривая 2 (рис. 6.42), имеющая гиперболический характер. При  частота вращения якоря
частота вращения якоря  , поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода. Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока
, поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода. Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока  . Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе (
. Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе ( ) двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы. Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 6.42) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при
) двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы. Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 6.42) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при  (рис. 6.42), так как машина переходит в генераторный режим (
(рис. 6.42), так как машина переходит в генераторный режим ( ). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.
). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.