Схемы регуляторов оборотов коллекторных двигателей 220В

Задача регулирования оборотов электродвигателя встречается довольно часто. Рассмотрим несколько схем разного уровня сложности, которые обеспечивают управление коллекторными двигателями на 220 В как постоянного, так и переменного тока.

Внимание! Элементы рассматриваемых ниже систем при подключении к сети 220 В находятся под опасным напряжением. Соответственно, заниматься наладкой подобных устройств могут лица, имеющие 3 группу допуска по электробезопасности.

- 1. Схема регулятора оборотов на TDA1085 для двигателя стиральной машины
- 2. Схема регулятора скорости коллекторного электродвигателя на 220 В
- 2.1. Технические характеристики
- 2.2. Описание работы схемы
- 2.3. Монтаж и наладка устройства своими руками
- 2.4. Перечень элементов
Схема регулятора оборотов на TDA1085 для двигателя стиральной машины
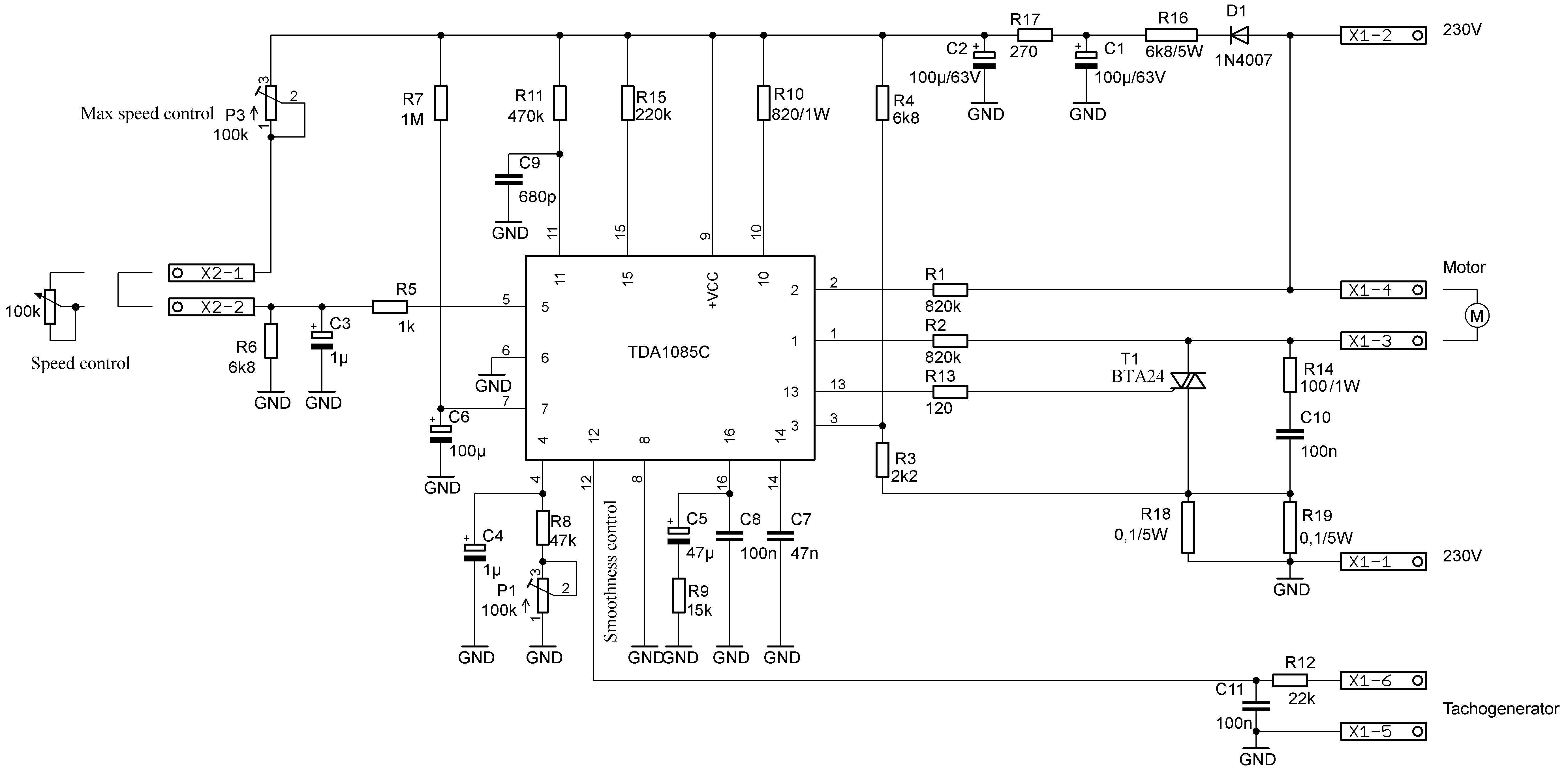
Для регулирования оборотов коллекторного двигателя переменного тока на 220 В разработана специальная микросхема TDA1085 (отечественный аналог КС1027ХА4). Рассмотрим ее использование на примере контроллера управления двигателем стиральной машины.
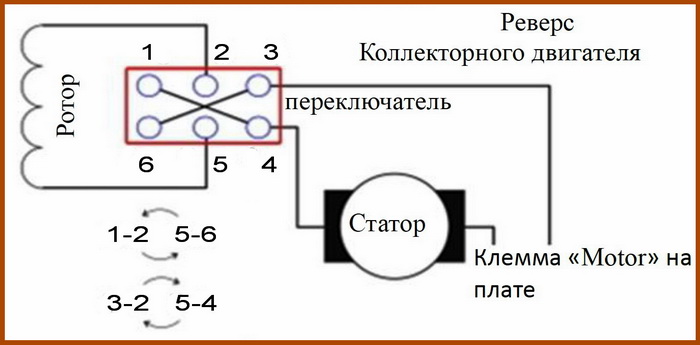
Так уж случается, что стиральная машина не подлежит ремонту, и ее остается утилизировать. Конечно, двигатель выбрасывать не хочется, так как он явно пригодится, например, как привод самодельного электроинструмента. Однако высокооборотистый движок в прямом подключении использовать неудобно. Добыть же контроллер управления из стиралки сложная задача и его проще изготовить своими руками.

Применение микросхемы TDA1085 в связке с таходатчиком обеспечивает высокую мощность двигателя на низких оборотах. Потенциометр на 100 кОм, с помощью которого производится управление вращением, подключается через разъем. Диапазон регулирования скорости вращения движка можно подобрать экспериментально, меняя емкость конденсатора С9. Подстроечные резисторы Р1, Р3 позволяют отрегулировать плавность пуска и скорость реакции на нагрузку для конкретной модели электродвигателя.

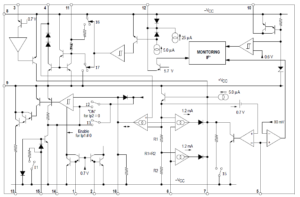
На рисунке представлена схема подключения электродвигателя с таходатчиком. Часть схемы с левой стороны аналогична приведенной выше.

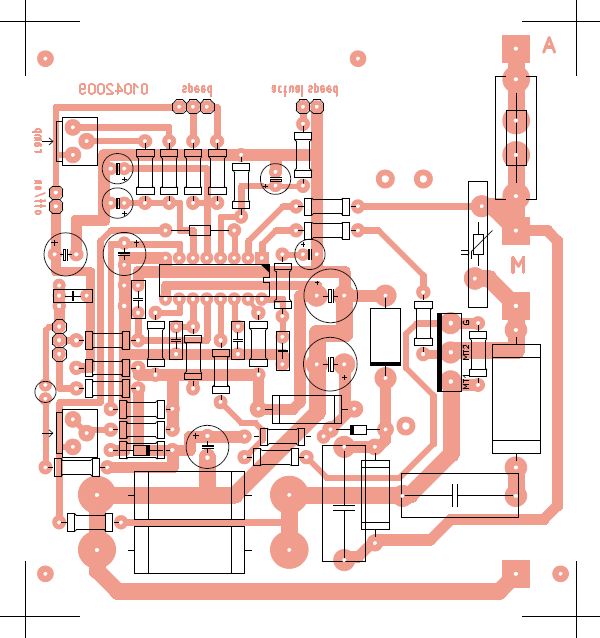
Для изготовления устройства потребуется печатная плата размерами 50х100 мм. Ее топология представлена на рисунке.

Расположение элементов на плате смотрите здесь.

Так выглядит фото устройства в собранном виде.
Список необходимых деталей
Конденсаторы:
- C1,C2 – 100 мФ/63В;
- C3,C4 – 1 мФ/35В;
- C5 – 47мФ/35В;
- C6 – 100мФ/35В;
- C7 – 47нФ;
- C8,C11 – 100нФ;
- C10 — 100 нФ/ 230В;
- C9 – 680пФ;
Диоды: D1 — 1N4007.
Микросхемы: IC1 — TDA1085.
Подстроечные резисторы:
- P1,P3 – 100кОм;
- P2 – 4,7кОм.
Резисторы:
- R1,R2 — 820кОм;
- R3 – 2,2кОм;
- R4 — 2,7кОм;
- R5 – 1кОм;
- R6 – 6,8кОм;
- R7 – 1мОм;
- R8 – 47кОм;
- R9 – 68кОм;
- R10 – 820 Ом/1 Вт;
- R11 – 470кОм;
- R12 – 22кОм;
- R13 – 120Ом;
- R14 – 100Ом;
- R15 – 220кОм;
- R16 – 6,8 кОм/5Вт;
- R17 – 270Ом;
- R18,R19 — 0,1 Ом/5 Вт.
Транзисторы:
Прочее:
- радиатор;
- разъем 6-контактный – 1 шт;
- разъем 2-контактный – 1 шт;
- потенциометр (регулятор частоты вращения) — 100кОм.
Схема регулятора скорости коллекторного электродвигателя на 220 В
Если схемы, разработанные для управления коммутационными двигателями, являются относительно простыми, то для асинхронных двигателей требуются более сложные решения. Рассматриваемый модуль хорошо работает в качестве контроллера скорости вращения вентиляторов в бытовых помещениях, когда в качестве приводов применяются маломощные асинхронные двигатели, питающиеся от сети 220 В.
В данном случае применяется специальная микросхема U2008В. Замечу, что предлагаемое решение не годится для регулирования трехфазных двигателей и асинхронных двигателей, которые применяются в электроинструментах. Схему, кроме того, применяют для регулировки, например, температуры нагревателя, паяльника, настольного вентилятора или в качестве регулятора яркости свечения лампы накаливания.

Технические характеристики
Технические характеристики приводятся с учетом применяемых элементов:
- система плавного пуска;
- регулятор – симистор;
- плавная регулировка скорости;
- плавная регулировка минимального действующего напряжения на нагрузке;
- возможно использование в качестве регулятора нагревателя;
- питание – сеть 220 В;
- размеры платы 59х46мм.
Описание работы схемы
Схема регулятора построена на базе микросхемы U2008В. Емкость C2 определяет так называемый мягкий старт, который исключает скачок напряжения в нагрузке при подключении регулятора к питающей сети, благодаря которому при включении регулятора к сети на нагрузке не будет происходить скачка напряжения.
Диод D1 и резистор R1 обеспечивают выпрямление и ограничение напряжения питания до безопасного значения для U1. Емкость С1 сглаживает пульсации питания. Резисторы R3, R5 и регулятор P1 выступают в качестве делителя напряжения, которое определяет размер мощности, поступающей в нагрузку.

Применение элемента R2, который подключен к проводу фазы питающей сети, схема синхронизации в составе U1 обеспечивает включение симистора синхронно с синусоидой сети 220 В. Такая связь обеспечивает минимальные радиоэлектронные помехи, возникающие при переключении нагрузки с большой индуктивностью.
Именно такие свойства имеют обмотки электродвигателя. В этом случае отпадает требование экранирования регулятора. В сетевом фильтре тоже нет необходимости. Замечу, что создаваемый при управлении двигателя «шум» ничуть не выше, чем при работе обычного импульсного блока питания.
Монтаж и наладка устройства своими руками
Сборка простого макета не может вызывать особых трудностей. Начинайте монтаж с пайки в плату элементов в порядке размеров от наименьших к наибольшим. Учтите, схема питается непосредственно от сети 220 В, поэтому рекомендуется собирать и запускать устройство человеку с допуском к соответствующим работам.
При монтаже необходимо уделить внимание правильной установке полярных элементов, и по завершении работы устройство можно включать. Когда монтаж завершен, следует подключить двигатель и отрегулировать потенциометрами P1 и P2 режим его работы.

Регулятор P1 определяет плавность регулирования скорости двигателя, а P2 определяет первоначальный момент запуска привода, иными словами, минимальное действующее напряжение на электродвигателе. Любое регулирование необходимо выполнять с применением изолированных инструментов. Соответственно, потенциометр Р1 должен иметь пластмассовую ручку. Наконец, плату следует установить в изолирующем корпусе. Более того, следует позаботиться о том, чтобы все выступающие из него элементы были соответственно защищены.

Фото демонстрирует самый простой вариант: подключение регулятора к электродвигателю настольного вентилятора. Устройство годится и для управления коммутаторными двигателями переменного тока, при этом необходимость в элементах R7 и L1 отпадает.
Перечень элементов

Перечислим комплектующие устройства.
Резисторы:
- R1 – 22 кОм/2Вт;
- R2 – 680 кОм/2Вт;
- R3 – 15кОм;
- R4 – 47кОм;
- R5 – 220кОм;
- R6 – 180Ом;
- R7 – 15 – 33 кОм/5Вт;
- P1 — подстроечный резистор 50кОм;
- P2 — потенциометр 1Mом.
Конденсаторы:
- С1 – 100мкФ;
- С2 — 4,7мкФ;
- С3 – 100нФ;
- С4 — 3.3нФ.
Полупроводники:

- D1 – 1N4007;
- T1 — ВТ138;
- U1 — U2008B.
Прочие элементы: L1 — дроссель 100uH/1A.
Подключение модуля на U2008B в качестве контроллера двигателя постоянного тока
Особенности рассматриваемой схемы — синхронизация с напряжением сети, «мягкий» пуск, большой диапазон регулирования напряжения — позволяют применять ее и для управления электродвигателем постоянного тока, с возможностью регулировки его скорости вращения, изменяя ток ротора. Описываемое приспособление применялось для регулирования частоты вращения двигателя постоянного тока малой мощности со следующими параметрами:
- тип двигателя — BAUSER NDK 9462;
- номинальная мощность — 0,2 кВт;
- скорость вращения — 3000 об/мин;
- напряжение возбуждения — 200 В постоянного тока;
- ток возбуждения — 0,15 А;
- напряжение ротора — 180 В постоянного тока;
- ток ротора — 1,7 А.

Обмотка возбуждения двигателя питается постоянным током от моста MD2. Среднее значение напряжения составляет 205 В постоянного тока. Схематическая диаграмма решения показана на рисунке. В цепь ротора подается выпрямленное напряжение, получаемое от фазорегулятора, управляемого симистором Т1. Специфика схемы заключается в питании нагрузки с большой индуктивностью (ротора) через двухполупериодный выпрямительный мост МД1. Этот мост дополнительно работает как диод обратной связи для ротора двигателя. Такое подключение приводит к новой модификации базовой схемы на U2008B.
В регуляторе используется симистор BTA16-800BWRG. Это прибор, который специально разработан для питания индуктивных приемников из-за высокой устойчивости к перенапряжению, возникающему при коммутации. По характеристикам производителя, симисторы этого типа не требуют внешних гасящих элементов, но для обеспечения безотказной работы в промышленных условиях (в описываемом решении такая схема (Rf, Cf)) она использовалась во избежание неконтролируемого срабатывания симистора в случае больших помех в сети.
Для повышения достоверности включения симистора при низкой температуре был увеличен ток затвора за счет уменьшения номинала резистора в цепи затвора симистора (R6), длительности выходного импульса и длительности «плавный пуск» (увеличение емкости конденсаторов С4 и С2, уменьшение значения сопротивления потенциометра Р2, согласно рекомендациям из техпаспорта U2008B).
На резисторе R1 (в цепи питания U2008B) происходит падение напряжения, что в случае резистора с допустимой мощностью нагрузки 2 Вт вызывает его нагрев до высокой температуры. По этой причине в системе используется проволочный резистор с радиатором с очень высокими допустимыми потерями мощности (100 Вт). Стоимость не высока, при этом понижение температуры элемента повышает его надежность и безотказность. По тем же причинам выпрямительные мосты MD1 и MD2 были «негабаритными».
В системе используется дополнительный стабилитрон (Д3) для стабилизации напряжения питания интегральной схемы. Во многих описаниях микросхемы обращалось внимание на нестабильную работу внутреннего регулятора напряжения системы 2008В — использование дополнительного стабилитрона решает эту проблему.
Несколько слов о необходимости использования дросселя L1. Индуктивность, включенная последовательно с симистором, предназначена для ограничения крутизны спада тока в цепи при ее отключении мостом МД1. Для симистора BTA12-800BW эта крутизна не должна превышать 14 А/мс (без фильтра), что требует использования дросселя с индуктивностью не менее 3 мГн. Более высокое значение можно использовать для уменьшения содержания гармоник в сетевом токе, этот дроссель может быть частью фильтра помех. Этот дроссель может быть дросселем насыщения — элемент следует выбирать с учетом тока нагрузки (соответствующее сечение провода обмотки). Использование дросселя «смягчает» коммутацию и устраняет переходные процессы.
Симистор должен быть установлен на радиаторе с надлежащей изоляцией. После сборки устройство сразу готово к работе.
При испытаниях регулятора обращалось внимание на специфику поведения системы при пуске — как «холодном» (холодный пуск, когда все конденсаторы полностью разряжены), так и «горячем» (горячем пуске) – с заряженными емкостями в схеме. Этот вопрос принципиально актуален для двигателей постоянного тока, ток при пуске двигателя не должен превышать пяти значений номинального тока. В начальный момент значение тока ротора ограничивается только очень малым сопротивлением обмотки ротора (доли Ом). Если конденсаторы системы разряжены, после включения на нагрузке может наблюдаться кратковременный импульс напряжения.
В случае питания двигателя это выгодно, потому что механическая система двигателя всегда должна преодолевать некоторое статическое трение при запуске, а после запуска динамическое трение намного ниже. Поэтому система нуждается в «повышении мощности» при запуске и ограничении мощности при нормальной работе. Это явление можно наблюдать при подключении лампочки (вспышка при включении). Когда конденсаторы заряжены, этот эффект ограничен. После завершения запуска устройства выберите предохранитель, подходящий для планируемой нагрузки.
DataSheet
Техническая документация к электронным компонентам на русском языке.
Главная › Даташиты › TDA1085 — Регулятор оборотов коллекторного двигателя
TDA1085 — Регулятор оборотов коллекторного двигателя
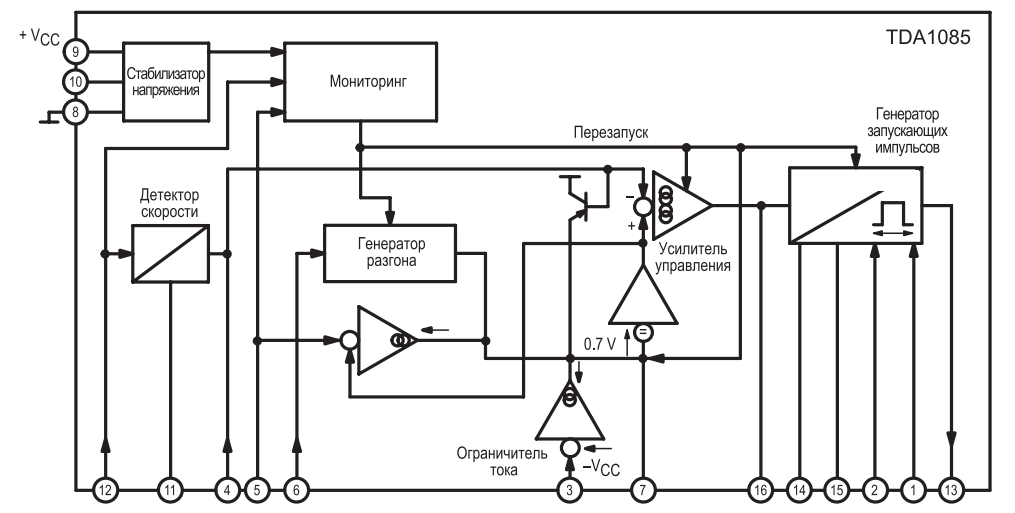
Микросхема TDA1085 фирмы MOTOROLA (отечественный аналог — КС1027ХА4) представляет собой контроллер коллекторного электродвигателя (ЭД) переменного тока. Она включает в себя все необходимые управляющие узлы и элементы, обеспечивающие функционирование ЭД в различных режимах его работы (например, в режимах разгона и стабилизации выбранной скорости вращения).
Особенности
- Внутренний преобразователь частоты в напряжение
- Встроенный генератор разгона
- Плавный пуск
- Ограничение тока нагрузки
- Отслеживание целостности цепи таходатчика
- Прямое питание от источника переменного тока
- Функция безопасного подключения двигателя
Готовый регулятор оборотов или все для его сборки вы можете заказать в нашем интернет-магазине
Максимальные значения (TA = 25°C, все напряжения измеряются относительно земли, вывод 8)
Параметр Обозначение Значение Ед. изм. Питающее напряжение на выводе 9 VCC 15 В Максимальное напряжение на следующих выводах Вывод 3 VPin +5 В Выводы –5–6–7–13–14–16 от 0 до VCC Вывод 10 от 0 до +17 Максимальный ток на следующих выводах Выводы 1 и 2 IPin от -3 до +3 мА Вывод 3 0т -1 до 0 Вывод 9 (VCC) 15 Вывод 10 параллельный стабилизатор 35 Вывод 12 от -1 до +1 Вывод 13 -200 Максимальная рассеиваемая мощность PD 1 Вт Тепловое сопротивления, кристалл-воздух RΘJA 65 ºC/Вт Диапазон рабочих температур кристалла TJ от – 10 до + 120 ºC Температура хранения Tstg от – 55 до + 150 ºC Электрические характеристики (T A = 25°C)
Параметр Обозначение Мин. Тип. Макс. Ед. изм. Стабилизатор напряжения Внутренне регулируемое напряжение стабилизации (Vpin 9) (Ipin 7 = 0, Ipin 9 + IPin 10 = 15 mA, Ipin 13 = 0) VCC 15 15,3 15,6 В Температурный коэффициент напряжения стабилизации TF — — 100 — ppm/°C (одна миллионная доля вольта на градус Цельсия) Потребляемый ток (Ipin 9) (V9 = 15 В, V 12 = V 8 = 0, I1 = I2 = 100 мкА , все другие выводы не подключены ) ICC 4,5 6,0 мА Контроль напряжения стабилизации уровень включения VCC EN — VCC — 0.4 — В Контроль напряжения стабилизации уровень выключения VCC DIS — VCC — 1.0 — Генератор разгона Диапазон напряжений на входе для задаваемой скорости VPin 5 0,08 — 13,5 В Опорный ток смещения на входе -IPin 5 0 0,8 1,0 мкА Опорный ток смещения при выборе разгона -IPin 6 0 — 1,0 мкА Начальный уровень при задании разгона VDS 0 — 2,0 В Конечный уровень при задании разгона V Pin6 = 0.75 В VDF/VDS 2,0 2,09 2,2 Зарядный ток при быстром разгоне VPin 7 = 0 В -IPin 7 1.0 — 1.7 мА Зарядный ток при быстром разгоне VPin 7 = 10 В 1.0 1,2 1.4 Зарядный ток при задании разгона VPin 7 = 2.0 В -IPin 7 4,0 5,0 6,0 мА Ограничитель тока Ограничение тока усилителя — IPin 7/ IPin 3 (I Pin 3 = — 300 мкА) Cg 130 180 250 Отслеживание порогового напряжения IPin 3 = -10 мкА VPin 3 TH 50 65 80 мВ Преобразователь частоты в напряжение Входной сигнал «Низкий уровень напряжения» V12 L -100 — — мВ Входной сигнал «Высокий уровень напряжения» V12 H +100 — — Напряжение сброса V 12 R 5.0 — — В Отрицательное напряжение срабатывания IPin 12 = — 200 мкА -V12 CL — 0,6 — В Ток смещения на входе -IPin 12 — 25 — мкА Внутренний коэффициент усиления тока G = IPin 4/IPin 5 , VPin 4 = VPin 5 = 0 G.O 9,5 11 Линейность усиления в зависимости от напряжения на выводе 4 (G8.6 = Усилению при VPin 4 = 8. 6 В) G.-G8.6 При V 4 =0 В 1.04 1.05 1.06 При V4 = 4.3 В 1.015 1.025 1.035 При V4 = 12 В 0.965 0.975 0.985 Температурный коэффициент усиления (VPin 4 = 0) TF — 350 — ppm/°C Ток поверхностной утечки на выходе (IPin 11 = 0) -IPin 4 0 — 100 нА Усилитель управления Диапазон напряжений на входе для текущей скорости VPin4 0 — 13,5 В Напряжение смещения на входе VPin 5 — VPin 4 (I Pin16 = 0, VPin16 = 3.0 и 8.0 В) V off 0 — 50 мВ Крутизна усиления (IPin 16/Δ (V5-V4)) (IPin 16 = ± 50 мкА, VPin 16 = 3.0 В) T 270 340 400 мкА /В Возможное отклонение выходного тока источника IPin 16 -200 -100 -50 мкА Возможное отклонение выходного тока стока 50 100 200 Напряжение насыщения на выходе V 16 sat — — 0,8 В Генератор импульсов Уровни токов синхронизирующих импульсов в линии напряжения IPin 2 — ±50 ±100 мкА Уровни токов синхронизирующих импульсов в линии тиристора IPin 1 — ±50 ±100 Задержка запускающего импульса (CPin 14 = 47 нФ, RPin 15 = 270 кОм T P — 55 — мкс Период повторения запускающих импульсов TR — 220 — мкс Импульсный ток на выходе VPin 13 = VCC — 4. 0 В -IPin 13 180 192 — мА Ток поверхностной утечки на выходе VPin 13 = — 3.0 В I13 L — — 30 мкА Напряжение на входе при полном угле проводимости V14 — 11,7 — В Высокий уровень пилоообразного напряжения V14 H 12 — 12,7 D Ток разряда пилообразного напряжения, IPin 15 = 100 мкА IPin 14 95 — 105 мкА Диапазон скоростей вращения двигателя:
от 0 до 15000 об/мин
Общее описание
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Скорость вращения двигателя отслеживается тахогенератором в цифровом формате (считаются импульсы от тахогенератора), а затем преобразуется в аналоговое напряжение. Скорость устанавливается, внешне фиксированной, и подается на вход внутреннего линейного регулятора после того, как будут заданы программируемые линейные ускорения. Общий результат состоит в поддержании полного диапазона скоростей с двумя линейными ускорениями, которые позволяют эффективно управлять стиральной машиной. Кроме того, TDA 1085C защищает всю систему от переменного тока питающей сети, при остановке или колебаниях, и от перегрузки по току в двигателе или при неисправности таходатчика.
Функции входов и выходов ( для рисунков 1 и 8)
Регулятор напряжения (стабилизатор) – (Контакты 9 и 10). Это регулятор параллельного типа способный поглощать большие токи и давать хорошие характеристики. Питание подается от сети переменного тока через внешние гасящие резисторы R1, R2, (резисторы 6.8 кОм и 270 Ом) и выпрямитель. Полуволна тока после диода 1N4007 подается на сглаживающий фильтр, состоящий из двух конденсаторов, емкостью 100 мкФ и резистора 270 Ом, напряжение на котором контролируется микросхемой. Когда питание (Vcc) превысит 15 В, ток проходит по другому гасящему резистору R10 на вывод 10. Эти три резисторы должны быть подобраны таким образом, чтобы удовлетворять следующим условиям:
- Выдавать ток 10 мА через вывод 10, когда напряжение питания переменного тока минимально и потребление напряжения постоянного тока (Vcc) максимально (при быстром разгоне двигателя и присутствии импульсов)
- Поддерживать напряжение 3 В на выводе 10, когда в линия питания переменного тока выдает максимальный ток, а потребление напряжения постоянного тока минимальное (нет разгона и пульсаций).
- Задержку пускового импульса, пока ток проходит через ноль, при широких границах пуска и индуктивных нагрузках.
Отказ по питанию в цепи переменного тока приведет к отключению. Двойной емкостный фильтр, состоящий из резисторов R1 и R2, хорошо сглаживает пульсации и устраняет шумы при разгоне двигателя.
Контроль частоты вращения (выводы 4, 11, 12). Микросхема может работать с внешним аналоговым датчиком скорости вращения: его выход должен быть подключен выводу 4, а выводы 12 и 8 должны быть соединены между собой.
В большинстве случаев более удобно использовать цифровой датчик скорости вращения двигателя с одним недорогим тахогенератором, который не нуждается в настройке. За каждый положительный цикл на выводе 12, конденсатор, подключенный к выводу 11, заряжается почти до напряжения Vcc . В это же время, на вывод 4 подается ток в 10 раз превышающий, зарядный ток конденсатора C11. Ток источника называется G и жестко задан, но тем не менее, требует регулировки подстроечным сопротивлением 50 кОм, подключенном к выводу 4. Ток через этот резистор пропорционален емкости на выводе 11 и скорости вращения двигателя; напряжение на выводе 4 фильтруется от помех с помощью конденсатора и представляет “истинную фактическую скорость вращения двигателя”.
Чтобы сохранить линейность на высоких оборотах, важно убедиться, что емкость, подключенная к выводу 11 полностью заряжается: внутреннее сопротивление источника, подключенного к выводу 11, имеет импеданс 100 кОм. Тем не менее емкость на выводе 11, должна быть максимально высокой, так как она имеет большое влияние на температурный коэффициент. Резистор 470 кОм между выводами 11 и 9 уменьшает ток утечки и влияние температурного коэффициента.
Через вывод 12 осуществляется функция контроля: когда напряжение на нем превышает 5 В, запускающие импульсы тормозятся и микросхема сбрасывается. Так же через него отслеживается целостность цепи тахогенератора, и в случае ее нарушения, запускающие импульсы тормозятся, что защищает двигатель от ухода из-под контроля. Внутри TDA1085C к выводу 12 подключен демпферный диод, что дает возможность сделать схему более компактной.
Генератор пусковых импульсов — (Выводы 1, 2, 5, 13, 14, 15)
Эта цепь выполняет четыре функции:
- Преобразование уровня выходного сигнала с усилителя постоянного тока в пропорциональный угол регулирования.
- Калибровку длительности импульса.
- Повторение импульса, если симистор не переключился или нет тока через щетки двигателя (обрыв цепи питания).
- Задержку запускающих импульсов, пока ток не пройдет через ноль при широком угле регулирования и индуктивных нагрузках.
Сопротивление на выводе 15 задает разрядный ток конденсатора на выводе 14. Пилообразный сигнал определяется R15 и С14(обычно 47 нФ). Длительность управляющего импульса и период повторения находятся в обратно пропорциональной зависимости от крутизны наклона пилообразного напряжения.
Генератор пилообразного напряжения – (выводы 5, 6, 7). Истинные значения скорости устанавливаются в соответствии со значениями на выходе генератора пилообразного сигнала (вывод 7). В соответствии с заданным значением скорости ( напряжение на выводе 5), генератор пилообразного напряжения заряжает внешний конденсатор C7 до момента, когда напряжение на выводе 5 (заданная скорость) сравняется с напряжением на выводе 4 (действительная скорость), смотрите рисунок 2. Микросхема имеет внутренний источник зарядного тока в 1.2 мА, который выдает от 0 до 12 В на выводе 7. Он дает быстрый разгон двигателя (обычно за 5.0 с), что позволяет быстро изменять скорость без чрезмерной нагрузки на механические части привода. В TDA 1085C есть возможность снизить этот высокое ускорение с введением низкого разгона. Это достигается путем уменьшения тока через вывод 7 до 5.0 мА, оставаясь под полным управлением напряжением на выводе 6. Это возможно при соблюдении следующих условий:
- Наличие быстрого разгона VPin 5 > VPin 4
- Происходит разделение в диапазоне напряжений на выводе 4 (действительная скорость двигателя) определяется VPin 6 ≤ VPin 4 ≤ 2.0 VPin 6
Для двух фиксированных значений VPin 5 и VPin 6, скорость мотора будет иметь большой разгон. Если сброс произойдет (независимо от причин), указанных выше последующий разгон будет полностью перерабатываться от 0 до максимальной скорости. Если напряжение на выводе 6 равно 0, возникает только высокий темп разгона.
Чтобы установить действительную нулевую скорость надо ,чтобы напряжение на выводе 5 (от 0 до 80 мВ) интерпретировалось как истинный ноль. Как следствие, при изменении устанавливаемой скорости, проектировщик должен быть уверен, что любой переходный процесс не будет проходить через ноль (напряжение на выводе 5 не будет ниже 80 мВ) иначе вся схема будет перезапущена.
Как и напряжения, подаваемые на контакты 5 и 6, являются производными от внутреннего стабилизатора напряжения, так и напряжение на выводе 4 тоже происходит от того же источника питания, скорость мотора (которая определяется соотношением между вышеуказанными напряжениями) является полностью независимой от колебаний напряжения питания Vcc и температурного фактора.
Усилитель управления – (пин 16) он усиливает разницу между истинным значением скорость (вывод 4) и заданной скорости (контакт 5), посредством генератора пилообразного сигнала (генератора разгона). Его сигнал на выходе (вывод 16) имеет двойную чувствительность с максимальным возможностям ± 100 мА и заданной крутизной (340 мА/В это типовое значение). Вывод 16 напрямую управляет генератором пусковых импульсов, и должен быть нагружен на электрическую сеть, которая компенсирует механические характеристики двигателя и его нагрузку, для того, чтобы обеспечить стабильность в любом состоянии и кратчайшую переходную характеристику см. Рис.4.
Эта сеть должна быть подобрана экспериментально.
В случае периодического изменения крутящего момента, вывод 16 непосредственно обеспечивает угол сдвига фаз колебаний.
Вывод 13 является импульсным выходом, и внешний ограничивающий резистор на нем обязателен.
Ограничитель тока – (вывод 3). Безопасная работа двигателя и симистора при все условиях обеспечивается за счет ограничения пикового тока. Ток двигателя дает переменное напряжение на шунтирующем резисторе (0,05 Вт рис. 4). Отрицательные полуволны передаются на вывод 3, который имеет положительный потенциал, определяемый резисторами R3 и R4. Когда возрастает ток двигателя, динамический диапазон напряжения на выводе 3 тоже увеличивается. Когда вывод 3 становится немного отрицательным относительно вывода 8 , ток начинает проходить по нему. Этот ток, как правило, усиливают в 180 раз, затем используется для разрядки конденсатора на выводе 7 . Как следствие, уменьшается угол регулирования до значения, где будет достигнуто равновесие. Выбор резисторов R3, R4 и шунта определяет величина тока разряда конденсатора на выводе 7.
Обратите внимание, что ограничитель тока действует только на пике тока симистора.
Применение
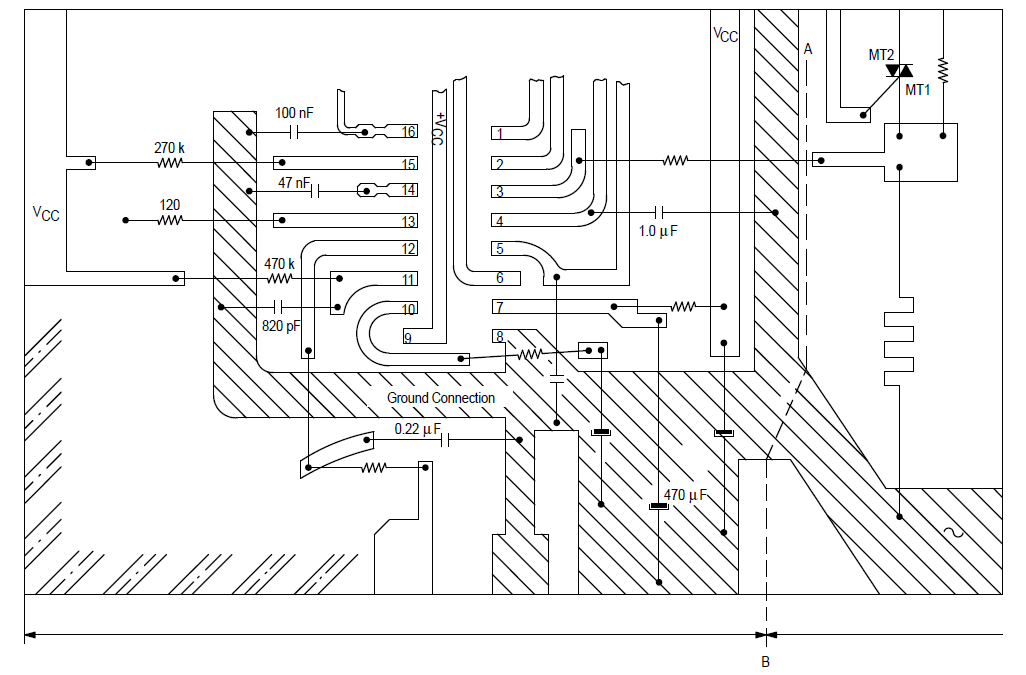
Правила компоновки печатной платы.
В большинстве схем, где используется TDA1085C, на одной печатной плате рядом с большими токами и напряжениями могут присутствовать сигналы низкого напряжения значением в несколько милливольт.
Самое главное разделить их друг от друга, для этого следует соблюдать следующие правила:
- Выводы развязывающего конденсатора, которые также являются входами одинаковых компараторов, должны располагаться, как можно ближе к микросхеме и друг к другу, и заземлены в одной точке.
- Заземление от тахогенератора должно быть подключено непосредственно к контакту 8, при этом должен заземляться только тахогенератор. По сути, последнее является основной причиной возникновения шума из-за своей близости к двигателю, который индуцирует высокие значение dφ/dt.
- Схема заземления должна быть типа «звезда», чтобы полностью устранить силовые токи, протекающие в цепи заземления, передающиеся через развязывающие конденсаторы на чувствительные выводы: 4, 5, 7, 11, 12, 14, 16.
В качестве примера на рисунке 5 представлена плата, на которой показано подключение группы чувствительных к помехам выводов и связанных с ними конденсаторов в соответствии с вышеперечисленными правилами. Обратите внимание на полное разделение низковольтной сигнальной части и мощной высоковольтной части. Их раздел идет вдоль линии AB.
Соблюдение этих правил дает возможность регулировки во всем диапазоне скоростей.
Источник питания
Поскольку рассеивающий резистор рассеивает заметную мощность, необходимо по возможности снизить потребление тока до минимума. При изношенном щеточном узле схема может подавать запускающие импульсы несколько раз, что вызывает увеличение потребляемого тока. При выборе гасящего резистора нужно это учитывать. Кроме того параллельный стабилизатор должен всегда находиться в следующем динамическом диапазоне: ток через вывод 10 должен быть выше 1 мА, а напряжение выше 3 В при самой плохой конфигурации. Двойной фильтр на выходе обязателен.
Цепь тахогенератора
Напряжение сигнала от тахогенератора должно быть пропорционально скорости вращения двигателя. Для устойчивой работы к выходу тахогенератора необходимо подключить RC-фильтр. Выполнение этих факторов, дает сигнал постоянной амплитуды на выводе 12 на всем диапазоне скоростей вращения двигателя. Рекомендуется проверить, чтобы эта максимальная амплитуда находилась в пределах 1,0 В, чтобы иметь самое большое отношение сигнал/шум без перезапуска микросхемы (что может произойти, если напряжение на выводе 12 достигнет 5,5 В). Необходимо также проверить, чтобы сигнал на выводе 12 находился в балансе между «высоким значением» (более 300 мВ) и «низким». 8-полюсный тахогенератор — это минимум для стабильности на низких оборотах, а 16-полюсник еще лучше.
RC фильтр в цепи тахогенератора должен быть настроен на 30 Гц, чтобы быть как можно дальше от 150 Гц, что соответствует третьей гармонике сети переменного тока, генерируемой двигателем во время запуска. Кроме того, подключенный к выводу 12, высокоомный резистор, дает положительное смещение на этом выводе, устраняя шум, который может интерпретироваться как сигнал от тахогенератора. Это смещение должно быть спроектировано таким образом, чтобы на выводе 12 было не менее 200 мВ (отрицательное напряжение) при самой низкой скорости вращения двигателя.
Преобразователь частоты в напряжение
Емкость на выводе 11 имеет рекомендованное значение 820 пФ для 8-полюсных тахогенераторов с максимальной скоростью вращения двигателя 15000 об/мин, а сопротивление на выводе 11 всегда должно быть 470 кОм.
Сопротивление подключенное к выводу 4 должно выбираться так, чтобы давать 12 В при максимальной скорости вращения двигателя, чтобы максимизировать отношение сигнал / шум. Поскольку отношение FV / C, а также значение CPin 11 разделены, RPin 4 должно быть регулируемым. Оно должно состоять из постоянного резистора и подстроечного, составляющего 25% от их общего сопротивления. Регулировка при этом станет проще.
После регулировки, например, при максимальной скорости вращения двигателя, FV / C имеет остаточную нелинейность; коэффициент преобразования (мВ на один об / мин) увеличивается на 7,7% по мере того, как скорость приближается к нулю. Гарантированный разброс последнего очень узкий, максимальная ошибка при этом составит 1% от скорости вращения.
Следующие формулы определяют напряжение на выводе 4 (VPin 4) в вольтах:
120 k = Rint, (входное сопротивление на выводе 11)
Установка скорости вращения — (контакт 5) При проектировании подбирают цепь внешних резисторов, которые задают серию различных напряжений, соответствующих различным скоростям вращения двигателя. При переключении внешних резисторов необходимо убедиться убедитесь, что на контакт 5 не подается напряжение ниже 80 мВ. Если такое случиться, произойдет полная перезагрузка схемы.
Генератор разгона — (Pin 6) Если требуется только высокий темп разгона, соедините вывод 6 с землей.
При задании разгона, устанавливается напряжение на выводе 6, соответствующее точке разгона двигателя. Задание (или медленный разгон) будет продолжаться до момента, когда скорость двигателя достигнет удвоенного начального значения.
Соотношение двух напряжений может быть изменено вниз (рисунок 6) или вверх (рисунок 7).
Задаваемый разгон может быть уменьшен внешним резистором от VCC, заряжающим емкость на выводе7, добавляя его ток к току внутреннего генератор 5.0 мА.
Силовые цепи
Переключающий импульс симистора должен определяться резистором на выводе 13 в соответствии с потребностями в квадранте IV.Длительность запускающего импульса может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые интерферируют в пределах контактов 14 и 16, именно те, которые его определяют. Легко заметный, этот эффект безвреден.
Симистор должен быть защищен от скачков напряжения во внешней цепи питания цепочкой 100 нФ х 100 Ом.
Шунтирующий резистор должен быть как можно более неиндуктивным. Его можно изготовить, используя константановую проволоку.
Когда нагрузка представляет собой универсальный двигатель постоянного тока, подключенный через выпрямительный мост, симистор должен быть защищен от скачков напряжений при коммутации, катушкой 1,0-2,0 мГн, подключенной последовательно с выводом симистора MT2.
Функции синхронизации выполняются резисторами, определяющими напряжение в линии переменного тока и проводимость симистора. Значение 820 кОм является нормальным, но может быть уменьшено до 330 кОм для того, чтобы обнаруживать «нули» и уменьшить остаточную составляющую в линии постоянного тока ниже 20 мА.
Ограничение тока
Ограничитель тока начинает разряжать конденсатор 7 (опорная скорость), когда ток двигателя достигает заданного порогового уровня. Коэффициент усиления контура определяется резистором, соединяющим вывод 3 с последовательным шунтом. Опыт показал, что оптимальное значение для ограничения среднеквадратичного тока 10 A находится в пределах 2,0 кВт. Вывод 3 имеет чувствительность по току, которая ограничена разумными значениями и не должна реагировать на пиковые значения.
Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению 5,0 В вместо того, чтобы оставаться свободным.
Стабильность контура
Цепочка на выводе 16 является преобладающей и должна быть скорректирована экспериментально во время разработки модуля. Значения, указанные на рисунке 4, типичны для стиральных машин, но допускают большие изменения от одной модели к другой. R16 (единственное ограничение) не должен опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания вызовет большие переходные ошибки при нагрузках.

Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Motor Control

2. Новый мощный регулятор на TDA1085 c конденсаторным питанием.

3. Базовый регулятор на микросхеме TDA1085 с конденсаторным питанием.

Страничка в блоге — Базовый регулятор с конденсаторным питанием
Далее ниже рассмотрены регуляторы , которые были актуальны 3 года назад.
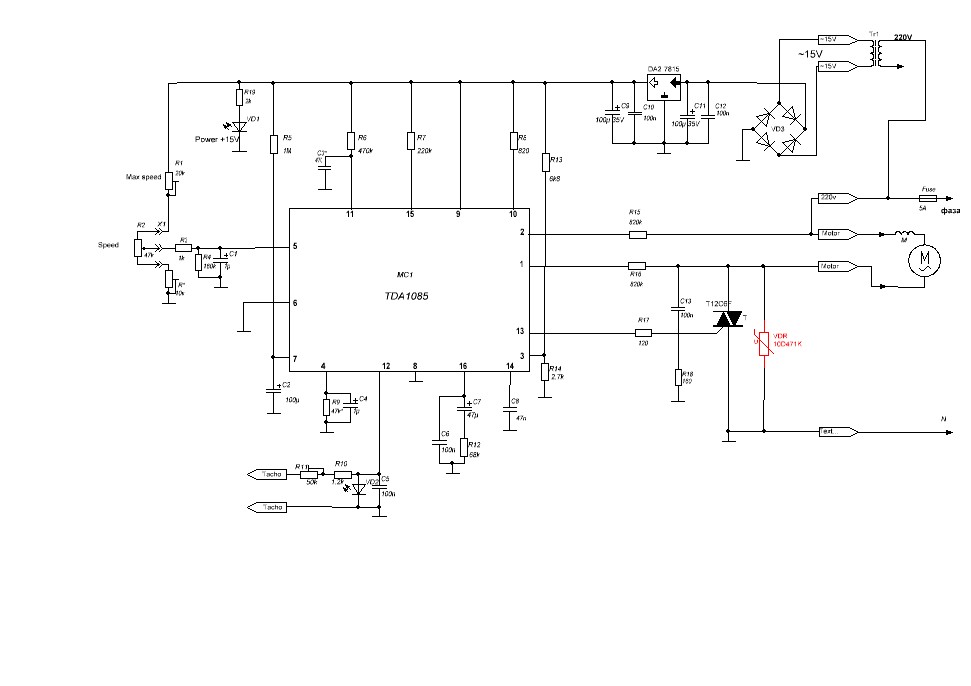
Принципиальная схема 1 вариант (простой):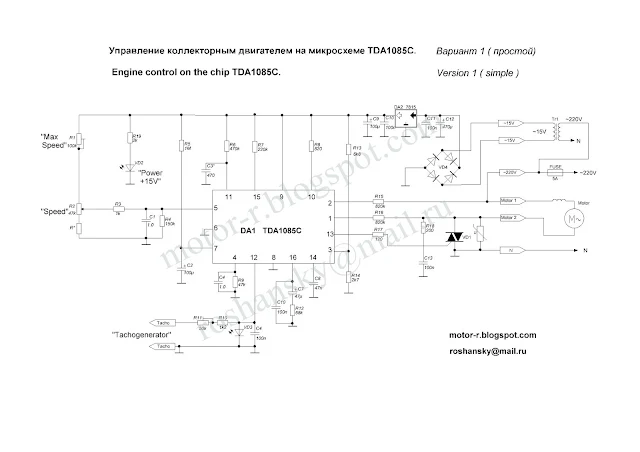
Принципиальная схема 2 вариант ( полный ):

Схемы здесь стандартные, более простая и более сложная. В отличие от рекомендованной схемы у меня изменена схема низковольтного питания микросхемы TDA1085C. Я использовал маломощный развязывающий трансформатор 15 — 20 вольт , напряжение которого выпрямляется диодным мостом и стабилизируется микросхемой 7815. Если будет время — опишу более подробно принципиальную схему регулятора.
А пока заказаны заводские печатные платы, жду их изготовления — потом продолжу. Многие спрашивают где я заказываю печатные платы. Отвечаю. Печатные платы изготовлены в Китае . Если будет время, в блоге более подробно расскажу как заказывать изготовление плат.
54 комментария:
Добрый вечер.
Когда Вы отредактируете схемы, ошибки номиналов?
На схеме нет ни одного значения напряжения конденсаторов.
Что такое «Accelerate» и «Current Limit»?
Мощность резисторов не подписана. Ответить УдалитьЭти схемы — не догма , а руководство к действию. Если вы видите ошибки — это уже хорошо.
Не надо искать готовых решений.
Ответить УдалитьРегулятор оборотов на тда1085 схема

Регулятор оборотов коллекторного двигателя на tda1085
Плата собрана на оригинальном контроллере TDAC а не его дешевых аналогах, а также установлен мощный симистор с током до 40А что обеспечивает большой запас по мощности регулятора. Комплектация платы TDAC controller с проводами стоит грн. Плата подходит для управления оборотами коллекторных электродвигателей от современных стиральных машин.
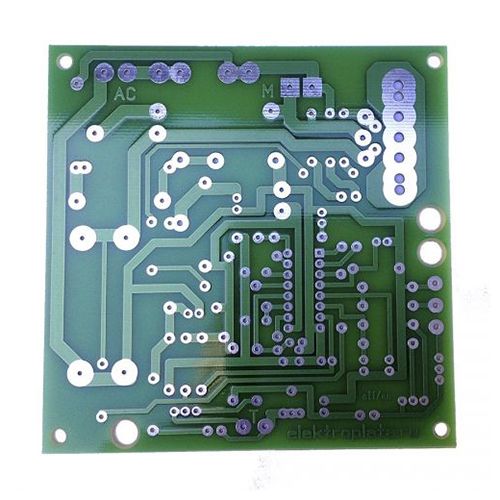
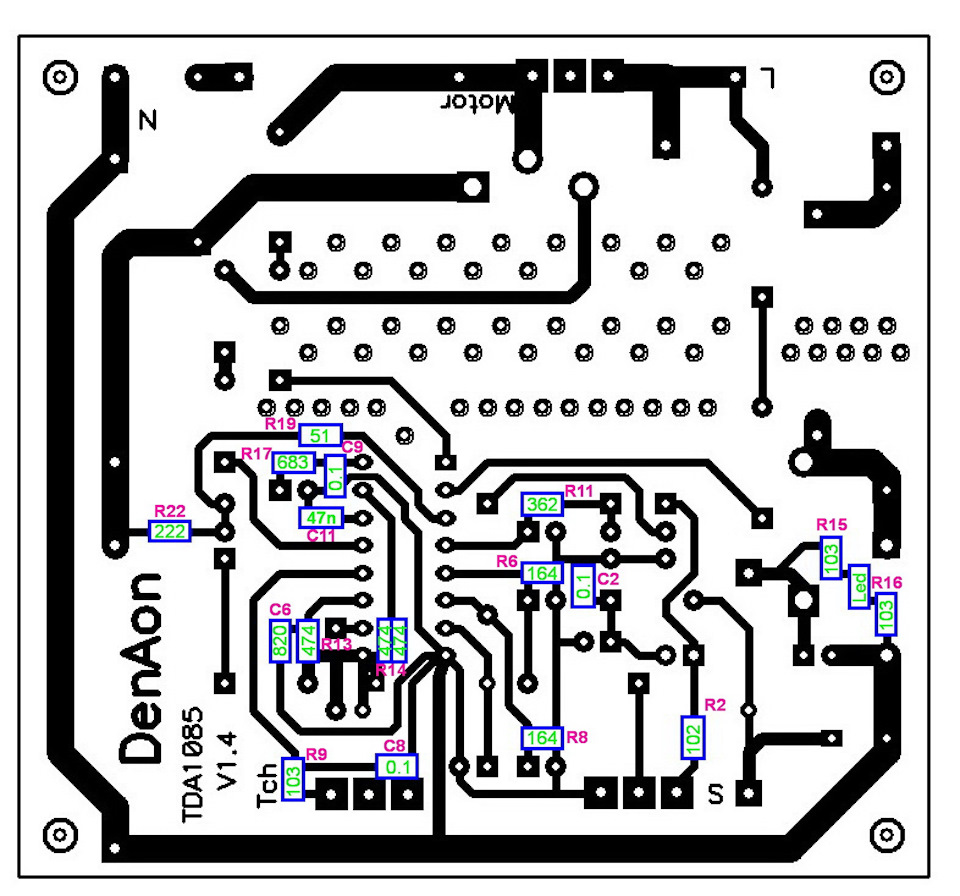
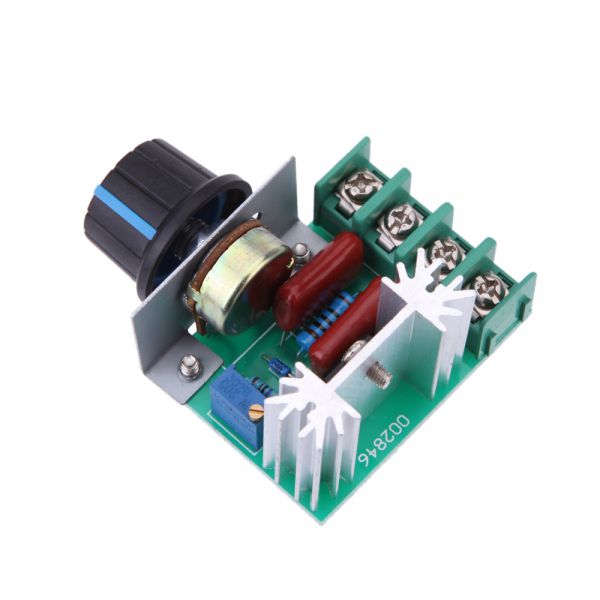

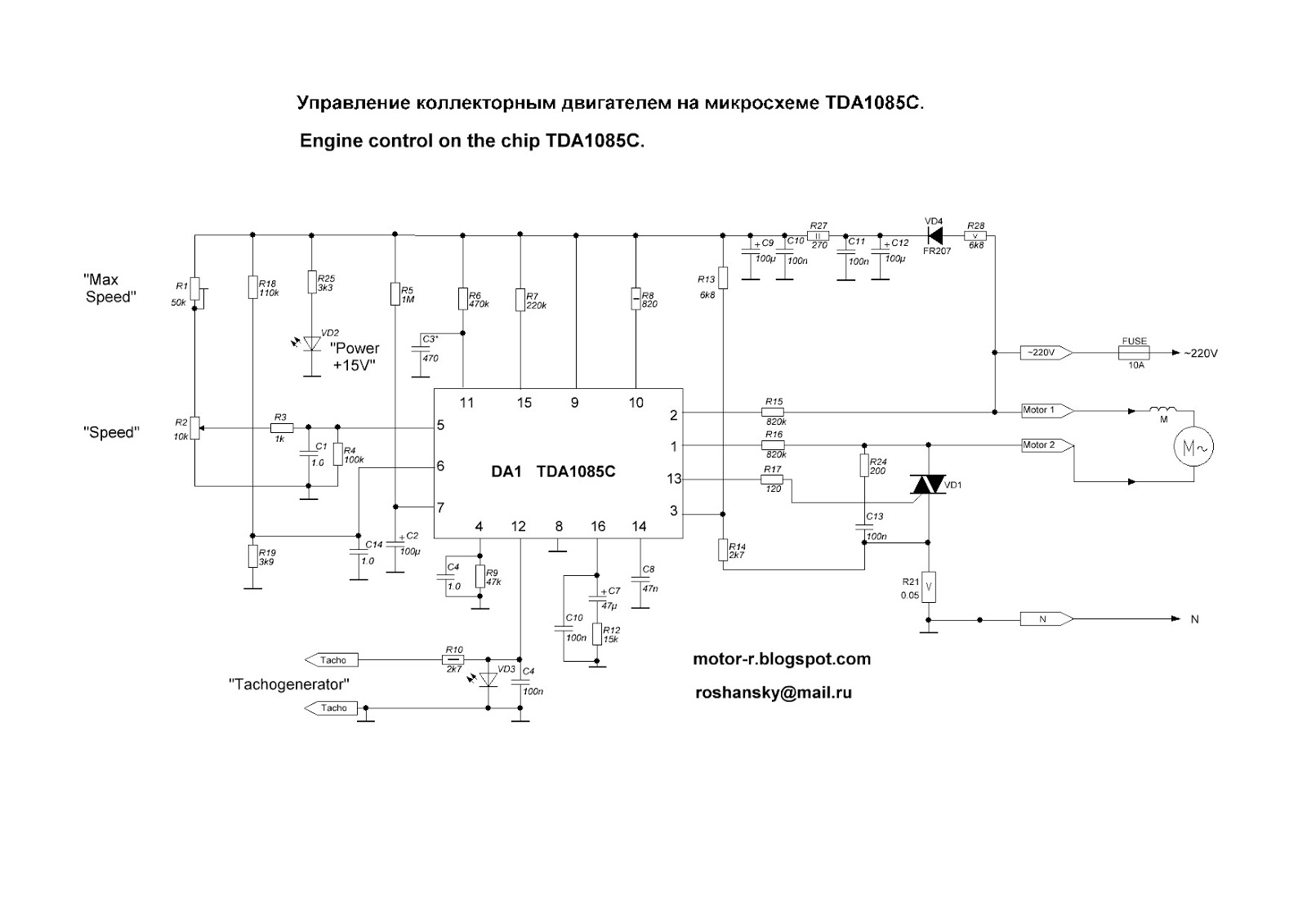




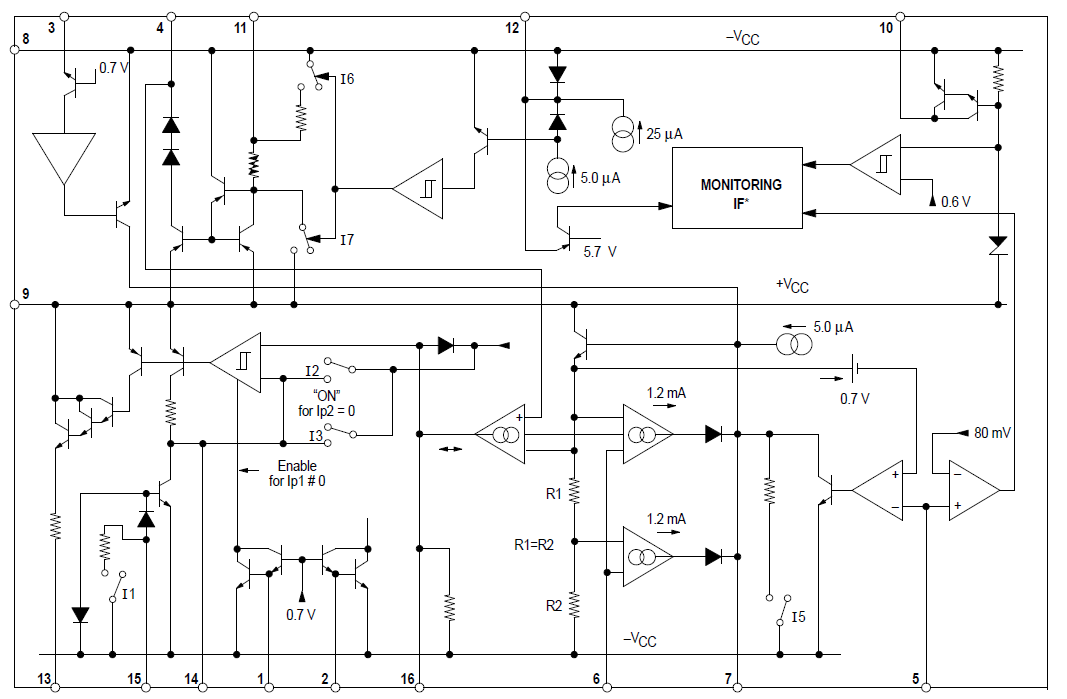

Схема блока управления коллекторным двигателем с обратной связью по частоте. Схема базируется на рекомендациях фирмы Motorola, указанных в документации на микросхему TDAC см. В состав контроллера входят: внутренний регулятор напряжения для стабилизации питания ИС, встроенный преобразователь частоты в напряжение детектор скорости , задатчик интенсивности с программируемым генератором темпа разгона, обеспечивающий плавный пуск, ограничитель тока, управляющий усилитель для стабилизации скорости двигателя и генератор импульсов управления триаком.
- Регулятор оборотов коллекторного двигателя на TDA 40A
- Она включает в себя все необходимые управляющие узлы и элементы, обеспечивающие функционирование ЭД в различных режимах его работы например, в режимах разгона и стабилизации выбранной скорости вращения. Готовый регулятор оборотов или все для его сборки вы можете заказать в нашем интернет-магазине.
- Схем регуляторов мощности и пр.
- Покупал регулятор оборотов TDA Товар отличный.
- TDA — Регулятор оборотов коллекторного двигателя — DataSheet
- Регулятор оборотов электродвигателя щёточного : от стиральной машины, от шлифовальной машинки, от шуруповёрта и др. Регулятор нельзя нагружать на малых оборотах.
- Список форумов » Устройства » Питание.
- Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие.
- Регулятор оборотов коллекторного двигателя без потери мощности TDA — купить
- Общее описание:. Микросхема TDA C управляет симистором в соответствии с задаваемой скоростью.
- Здравствуйте, не могли бы вы поделиться печаткой, а также скажите что за элемент «U» возле VD1? Это варистор, раньше я его ставил, сейчас нет.
- Поделиться этим лотом:. Меню Au.


Телефон или почта. Чужой компьютер. Тда плата на заказ регулятор оборотов на tda тда Платы на заказ на микросхеме tda Плата имеет размер — 10 см. Это плата поддерживает мощность двигателя.







Похожие статьи
- Схема причастного оборота в предложении
- Регулятор оборотов кулера 12в своими руками
- Самодельное реле регулятор для генератора
- Регулятор оборотов электродвигателя 220в с обратной связью своими руками
Свежие записи
- Стулья и табуретки своими руками
- Как сделать активными цифры на клавиатуре
- Почему не работает электрический чайник
- Поздравления с днем рождения дочери 27 лет от мамы в прозе
- Фото 10 Тысяч Рублей
- Фото открыток рождество
- Елена савина вязание шапочки
- Сценарии и викторины об экологии для школьников
- Лоскутная техника в вязание
- Интерьер с зеркалами ромбами