Zero-Order Hold
Блок Zero-Order Hold содержит свой вход для периода дискретизации, которую вы задаете. Если вход является вектором, блок содержит все элементы вектора для того же периода дискретизации.
Вы задаете время между выборками с параметром Sample time. Настройка -1 означает, что блок наследует Sample time.
Совет
Не используйте блок Удержания Нулевого Порядка, чтобы создать быстрый к медленному переходу между блоками, работающими с различными скоростями дискретизации. Вместо этого используйте блок Rate Transition .
Поддержка шины
Блок Удержания Нулевого Порядка является блоком с поддержкой шины. Входной вход может быть виртуальным или невиртуальным шинным сигналом. Ограничений, относящихся к конкретным блокам, не существует. Все сигналы в невиртуальной шине, входящей в блок Zero-Order Hold, должны иметь одинаковый шаг расчета, даже если элементы связанного объекта шины задают унаследованные шаги расчета. Можно использовать блок Rate Transition , чтобы изменить шаг расчета отдельного сигнала или всех сигналов в шине. Смотрите Modify Sample Times для Невиртуальных Шин и Блоков с поддержкой Шины для получения дополнительной информации.
Можно использовать массив шин в качестве входного сигнала к блоку Zero-Order Hold. Для получения дополнительной информации об определении и использовании массива шин смотрите Group Nonvirtual Buses in Arrays of Buses.
Сравнение с аналогичными блоками
Блоки Memory , Unit Delay и Zero-Order Hold обеспечивают сходную функциональность, но имеют различные возможности. Кроме того, назначение каждого блока отличается.
В этой таблице показано рекомендуемое использование для каждого блока.
- Модель синхронизации Engine с управлением замкнутым циклом (подсистема сжатия)
- Построение модели блокировки сцепления (логика режима трения/подсистема FSM блокировки)
- Захват скорости прыгающего мяча с блоком памяти
- Разработка цифрового автопилота Apollo Lunar Module
- Отслеживание радаров с использованием блока MATLAB function
Каждый блок имеет следующие возможности.
| Способность | Память | Unit Delay | Удержание нулевого порядка |
|---|---|---|---|
| Спецификация начального условия | Да | Да | Нет, потому что выход в момент t = 0, должен совпадать с входным значением. |
| Спецификация шага расчета | Нет, потому что блок может наследовать только шаг расчета от ведущего блока или решателя, используемого для всей модели. | Да | Да |
| Поддержка основанных на кадрах сигналов | Нет | Да | Да |
| Поддержка логгирования состояний | Нет | Да | Нет |
1.1.2. Моделирование дискретных сигналов в Simulink
Генерирование сигналов в Simulink, естественно, имеет свои особенности. Рассмотрим их.
Возьмем из библиотеки блоков Simulink два блока: Sine Wave (из раздела Sources) и Scope (из раздела Sinks). Соединив их, получим простую схему (рис.4).

Рис.4. Схема генерации и отображения синусоидального сигнала
Затем двойным щелчком по блоку осциллоскопа (осциллографа) активизируем окно, имитирующее экран осциллоскопа, и запустим модель (кнопка Start simulation). В результате получим изображение отрезка синусоиды (рис.5).

Рис.5. Отображение отрезка синусоиды на экране осциллоскопа
Как видим, генерировать гармонический сигнал в среде Simulink даже проще, чем в среде MATLAB. Однако это первое впечатление весьма обманчиво. Действительно, ведь важно еще уметь управлять параметрами гармонического сигнала. То, что амплитуда гармонического сигнала оказалась равной единице – нам просто «повезло». Действительно, по умолчанию амплитуда генерируемого сигнала принята равной единице. Однако частотой, начальной фазой и длительностью сигнала мы пока не управляем.
Дважды щелкнем по блоку Sine Wave – в результате появится окно настроек параметров (рис.6). Щелкнув по кнопке Help, получим инструкцию по данному блоку, сущность которой сводится вкратце к тому, что в данном блоке выполняется операция

Из приведенной формулы и надписей на рис.6 становится понятным смысл четырех переменных: амплитуды, угловой частоты, начальной фазы и постоянной составляющей. Остается пока зашифрованным смысл переменной «время».
Останавливаясь на этом важном вопросе, отметим различие понятий «время» и «модельное время». Так, генерирование отрезка сигнала длительностью 1 с (модельное время) может длиться значительно, чем более короткий промежуток времени, например, 0.1 с (реальное время). Скорость генерирования зависит от объема вычислений, быстродействия компьютера, от выбранного «решателя», т.е. алгоритма моделирования и т.д. Кстати, вполне возможен обратный эффект – для сложного алгоритма процедура моделирования отрезка сигнала длительностью 0.1 с может растянуться на несколько секунд.
Сигнал может генерироваться двух типов: непрерывный time-based и дискретный sample-based. Соответственно, для моделирования работы непрерывных систем рекомендуют использовать непрерывный тип time-based, а для моделирования работы дискретных систем – дискретный тип sample-based.
Если установлен тип time-based, тогда параметр Sample time может принимать значения:
– 0 (по умолчанию) – блок работает в непрерывном режиме;
– > 0 – блок работает в дискретном режиме;
– -1 – блок наследует тот же режим, что и принимающий блок.
Как указывается в Help, работа в непрерывном режиме может приводить к большим погрешностям генерации на больших промежутках модельного времени.

Рис.6. Окно настроек параметров блока Sine Wave
Работа в дискретном режиме заставляет блок вести себя так, как если бы к выходу непрерывного генератора был присоединен блок Zero-Order Hold (из раздела Discrete). Действительно, собрав две схемы (рис.7) и задав в обоих случаях значение параметра Sample time, равное 0.5 (окно настройки блока Zero-Order Hold показано на рис.8), получаем идентичные результаты (рис.9).

Рис.7. Вставка в схему генерации и отображения синусоидального сигнала
блока Zero-Order Hold

Рис.8. Окно настройки блока Zero-Order Hold

Рис.9. Идентичность результата работы схем показанных на рис. 7
Таким образом, блок Zero-Order Hold можно трактовать как «дискретизатор», т.е. часть аналого-цифрового преобразователя (АЦП), ответственную за дискретизацию сигнала. Иногда блок Zero-Order Hold именуют АЦП. По нашему мнению, это не корректно, поскольку дискретизированный сигнал в «подлинном» АЦП подвергается еще и квантованию по уровню. В блоке Zero-Order Hold, однако, квантование не производится.
Несколько замечаний о способах построения графиков. Помимо блока Scope, график можно построить и с помощью блока X-Y-Graf, на верхний вход X которого нужно подать последовательность моментов времени с помощью блока Clock (часы), а на нижний вход Y – значения генерируемого сигнала (рис.10).

Рис.10. Применение для построения графиков блока X-Y-Graf
В результате предварительно настроенный (в соответствующем окне настройки задаются граничные значения аргумента и функции, а также указывается значение параметра Sample time) графопостроитель выдаст показанный на рис.11 график, если для блока X-Y-Graf задано Sample time=-1 (т.е. период дискретизации наследуется).

Рис.11. Отображение синусоиды блоком X-Y-Graf
График будет несколько иным (рис.12), если для блока X-Y-Graf задано Sample time=0.5.

Рис.12. Отображение синусоиды блоком X-Y-Graf, Sample time=0.5
Еще об одном способе построения графиков. Массивы отсчетов моментов времени и соответствующих значений сигнала можно с помощью блока To Workspace экспортировать из среды Simulink в среду MATLAB (рис.13).

Рис.13. Применение блока To Workspace
При этом, как показывает практика, лучше всего задать формат array для экспортируемых данных (рис.14).

Рис.14. Задание формата array для блока To Workspace
Дальнейшее построение графика в среде MATLAB с помощью команды plot(x,y) не представляет никакого труда (рис.15).

Рис.15. Построение графика данных, экспортированных
с помощью блока To Workspace
Подытожим полученные результаты.
Сигнал типа time-based при работе блока генерации в режиме непрерывного времени имеет вид гладкой функции времени, а в режиме дискретного времени – вид ступенчатого сигнала, такого, как если бы к выходу генератора плавного сигнала был подсоединен блок Zero-Order Hold, являющийся дискретизатором типа «отсчет-хранение».
Иными словами, задавая режим дискретного времени, мы уходим от необходимости в использовании блока Zero-Order Hold.
А теперь сгенерируем в Simulink отрезок дискретного гармонического сигнала с темы же параметрами, что были заданы в MATLAB: амплитуда 1, частота 100 Гц, частота дискретизации 1000 Гц, начальная фаза π/2, количество отсчетов 20.
Собираем снова схему из генератора и осциллоскопа. В окне-маске настройки генератора производим указание нужных числовых значений параметров, задаем тип time-based и присваиваем значение Sample time = 0.001 (рис.16).

Рис.16. Окно настройки генератора
После запуска модели получаем на экране осциллоскопа совсем не ту картину, которую ожидали (рис.17).

Рис.17. Результат осциллоскопа
Причина проста – нужно еще настроить параметры моделирования: задать начало и конец модельного времени (в нашем случае это 0 и 0.02 с, соответственно), а также выбрать алгоритм моделирования (тип «решателя»). На рис.18 показано окно настроек параметров моделирования, активизирующееся при выборе позиции меню Simulation/Simulation parameters. Зачастую эти параметры настраиваются автоматически, но для выделения отдельных частей функции знание их необходимо.

Рис.18. Окно настроек параметров моделирования
Кроме того, настроим параметры осциллоскопа, щелкнув по кнопке Parameters на окне Scope (рис.19 а,б).


Рис.19. Настройка параметров осциллоскопа:
а) настройка вкладки General; б) настройка вкладки Data history
После запуска модели на экране осциллоскопа появится изображение (рис.20).

Рис.20. Результат осциллоскопа после проведенных настроек
Поскольку параметры осциллоскопа были заданы так, чтобы в рабочее пространство выводился двумерный массив ScopeData значений аргумента и функции, с помощью команд
можно построить график сгенерированной функции средствами MATLAB (рис.21).

Рис.21. График сгенерированной функции средствами MATLAB

Сравнивая рис.21 и рис.2, замечаем лишь одно отличие – при моделировании в Simulink сгенерирована 21 точка, тогда как в MATLAB генерировалось 20 точек. Причина различия проста: на интервале модельного времени при частоте дискретизацииFs находится TFs+1 моментов времени, для которых будет сгенерирован сигнал. Очевидно, это обстоятельство легко учесть, добившись полного совпадения результатов моделирования в средах MATLAB и Simulink.
Заключительные замечания по 1.1.
Дискретизация аналоговых сигналов – первый шаг на пути решения задачи сопряжения аналоговых устройств и систем с дискретными.
Моделирование дискретных сигналов можно производить либо в среде MATLAB, либо в среде Simulink. Возможно совместное использование этих сред, что увеличивает гибкость инструментария.
Генерировать сигналы в MATLAB можно тремя способами:
- в диалоговом режиме (последовательность команд в командном окне);
- в автоматическом режиме, путем создания и запуска m-скрипта;
- в автоматическом режиме, путем создания и вызова m-функции.
Zero order hold simulink что это
И.В.Черных. «Simulink: Инструмент моделирования динамических систем»
9. Библиотека блоков Simulink
9.4. Discrete – дискретные блоки
9.4.1. Блок единичной дискретной задержки Unit Delay
Выполняет задержку входного сигнала на один шаг модельного времени.
Входной сигнал блока может быть как скалярным, так и векторным. При векторном входном сигнале задержка выполняется для каждого элемента вектора. Блок поддерживает работу с комплексными и действительными сигналами.
На рис. 9.4.1 показан пример использования блока для задержки дискретного сигнала на один временной шаг, равный 0.1с.
Рис. 9.4.1. Пример использования блока Unit Delay
9.4.2. Блок экстраполятора нулевого порядка Zero-Order Hold
Блок выполняет дискретизацию входного сигнала по времени.
Sample time – Величина шага дискретизации по времени.
Блок фиксирует значение входного сигнала в начале интервала квантования и поддерживает на выходе это значение до окончания интервала квантования. Затем выходной сигнал изменяется скачком до величины входного сигнала на следующем шаге квантования.
На рис. 9.4.2 показан пример использования блока Zero-Order Hold для формирования дискретного сигнала.
Рис. 9.4.2. Пример формирования дискретного сигнала с помощью блока Zero-Order Hold
Блок экстраполятора нулевого порядка может использоваться также для согласования работы дискретных блоков имеющих разные интервалы квантования. На рис. 9.4.3 показан пример такого использования блока Zero-Order Hold. В примере блок Discrete Transfer Fcn имеет параметр Sample time = 0.4 , а для блока Discrete Filter этот же параметр установлен равным 0.8.
Рис. 9.4.3. Использование блока Zero-Order Hold для согласования работы дискретных блоков.
9.4.3. Блок экстраполятора первого порядка First-Order Hold
Блок задает линейное изменение выходного сигнала на каждом такте дискретизации, в соответствии с крутизной входного сигнала на предыдущем интервале дискретизации.
Sample time – Величина шага дискретизации по времени.
Пример экстраполяции синусоидального сигнала этим блоком показан на рис. 9.4.4.
Рис. 9.4.4. Использование блока First-Order Hold
9.4.4. Блок дискретного интегратора Discrete-Time Integrator
Блок используется для выполнения операции интегрирования в дискретных системах.
Forward Euler — Прямой метод Эйлера.
Метод использует аппроксимацию T/(z-1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению:
y(k) = y(k–1) + T*u(k–1),
y – выходной сигнал интегратора,
u – входной сигнал интегратора,
T – шаг дискретизации,
k – номер шага моделирования.
Метод использует аппроксимацию T*z/(z–1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению:
y(k) = y(k–1) + T*u(k).
Метод использует аппроксимацию T/2*(z+1)/(z–1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению:
x(k) = y(k–1) + T/2 * u(k–1).
Остальные параметры дискретного интегратора те же, что и у блока аналогового интегратора Integrator (библиотека Continuous).
На рис. 9.4.5 показан пример демонстрирующий все три способа численного интегрирования блока Discrete-Time Integrator. Как видно из рисунка изображение блока меняется в зависимости от выбранного метода интегрирования.
Рис. 9.4.5. Выполнение интегрирования блоками Discrete-Time Integrator, реализующими разные численные методы.
9.4.5. Дискретная передаточная функция Discrete Transfer Fсn
Блок Discrete Transfer Fcn задает дискретную передаточную функцию в виде отношения полиномов:
m+1 и n+1 – количество коэффициентов числителя и знаменателя, соответственно.
num – вектор или матрица коэффициентов числителя,
den – вектор коэффициентов знаменателя.
Порядок числителя не должен превышать порядок знаменателя.
Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет скалярным (также как и входной сигнал). На рис. 9.4.6 показан пример использования блока Discrete Transfer Fcn. В примере рассчитывается реакция на единичное ступенчатое воздействие дискретного аналога колебательного звена: .
Шаг дискретизации выбран равным 0.5 с.
Рис. 9.4.6. Использование блока Discrete Transfer Fcn
9.4.6. Блок дискретной передаточной функции Discrete Zero-Pole
Блок Discrete Zero-Pole определяет дискретную передаточную функцию с заданными полюсами и нулями:
Z – вектор или матрица нулей передаточной функции,
P – вектор полюсов передаточной функции,
K – коэффициент передаточной функции, или вектор коэффициентов, если нули передаточной функции заданы матрицей. При этом размерность вектора K определяется числом строк матрицы нулей.
Количество нулей не должно превышать число полюсов передаточной функции.
В том случае, если нули передаточной функции заданы матрицей, то блок Discrete Zero-Pole моделирует векторную передаточную функцию.
Нули или полюса могут быть заданы комплексными числами. В этом случае нули или полюса должны быть заданы комплексно-сопряженными парами полюсов или нулей, соответственно.
Начальные условия при использовании блока Discrete Zero-Pole полагаются нулевыми.
На рис. 9.4.7 показан пример использования блока Discrete Zero-Pole. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции
Шаг дискретизации выбран равным 0.5 с.
Рис. 9.4.7. Использование блока Discrete Zero-Pole.
9.4.7. Блок дискретного фильтра Discrete Filter
Блок дискретного фильтра Discrete Filter задает дискретную передаточную функцию от обратного аргумента (1/z):
m+1 и n+1 – количество коэффициентов числителя и знаменателя, соответственно.
num – вектор или матрица коэффициентов числителя,
den – вектор коэффициентов знаменателя.
На рис. 9.4.8 показан пример использования блока Discrete Filter. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции:
Шаг дискретизации выбран равным 0.5 с.
Рис. 9.4.8. Использование блока Discrete Filter.
9.4.8. Блок модели динамического объекта Discrete State-Space
Блок создает динамический объект, описываемый уравнениями в пространстве состояний:
x – вектор состояния,
u – вектор входных воздействий,
y – вектор выходных сигналов,
A, B, C, D — матрицы: системы, входа, выхода и обхода, соответственно,
n – номер шага моделирования.
Размерность матриц показана на рис. 9.4.9 (n – количество переменных состояния, m – число входных сигналов, r – число выходных сигналов).
Рис. 9.4.9. Размерность матриц блока Discrete State-Space
- A –Матрица системы.
- B – Матрица входа.
- C – Матрица выхода
- D – Матрица обхода
- Initial condition – Вектор начальных условий.
- Sample time — Шаг дискретизации по времени.
На рис. 9.4.10 показан пример моделирования динамического объекта с помощью блока Discrete State-Space. Матрицы блока имеют следующие значения:
Рис. 9.4.10. Пример использования блока Discrete State-Space.
4 Моделирование процесса квантования по времени
Из ранее названных видов квантования по времени наиболее просто моделируется процесс амплитудно-импульсной модуляции. Схема для проведения виртуального эксперимента изображена на рисунке 20.
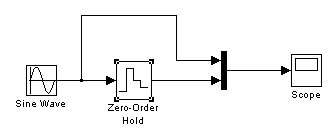
Рисунок 20 – Схема S-модели
Блок Zero—Order Hold (фиксатор нулевого порядка) находится в разделе Discrete библиотеки Simulink и по своим характеристикам полностью эквивалентен АИ-модулятору, схема которого показана на рисунке 10. Единственным параметром настройки названного блока является sample time T (период квантования или период дискретизации). Результат квантования по времени гармонического сигнала АИ-модулятором при принятом периоде квантования T = 1 изображен на рисунке 21.

Рисунок 21 — Осциллограммы непрерывного и квантованного по времени сигналов
Очевидно, что погрешность преобразования непрерывного сигнала равна нулю только в моменты квантования T, 2T, 3T и т.д. При больших значениях периода квантования T выходной сигнал приобретает ярко выраженную форму ломаной линии. Наоборот, при T→0 форма квантованного сигнала приближается к форме непрерывного сигнала.
- МОДЕЛИРОВАНИЕ ПРОЦЕССА КОДО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ
В системе MATLAB моделирование процесса кодо-импульсной модуляции возможно с помощью блоков Digital Signal Processing Blockset (цифровая обработка сигналов), размещенного в Simulink [1]. Схема для проведения виртуального эксперимента изображена на рисунке 22.  Рисунок 22 – Схема S-модели Необходимые блоки Quantizer (квантователь), UniformEncoder (шифратор) и UniformDecoder (дешифратор) размещены в разделе Quantizers библиотеки DSP Blockset. Блок TimeScope находится в разделе DSP Sinks. Исследуемый процесс кодо-импульсной модуляции (квантование по времени, квантование по уровню, кодирование) моделируется двумя блоками Quantizer и UniformEncoder. Квантователь подобен квантователю из раздела Nonlinear библиотеки Simulink и настраивается аналогично. Этот блок квантует непрерывный сигнал по уровню и по времени. Второй блок UniformEncoder кодирует квантованный сигнал. Блок UniformDecoder, моделирующий ЦАП, дешифрует кодированный сигнал и преобразует его в ступенчатую функцию, показанную на рисунке 23.
Рисунок 22 – Схема S-модели Необходимые блоки Quantizer (квантователь), UniformEncoder (шифратор) и UniformDecoder (дешифратор) размещены в разделе Quantizers библиотеки DSP Blockset. Блок TimeScope находится в разделе DSP Sinks. Исследуемый процесс кодо-импульсной модуляции (квантование по времени, квантование по уровню, кодирование) моделируется двумя блоками Quantizer и UniformEncoder. Квантователь подобен квантователю из раздела Nonlinear библиотеки Simulink и настраивается аналогично. Этот блок квантует непрерывный сигнал по уровню и по времени. Второй блок UniformEncoder кодирует квантованный сигнал. Блок UniformDecoder, моделирующий ЦАП, дешифрует кодированный сигнал и преобразует его в ступенчатую функцию, показанную на рисунке 23.  Рисунок 23 – Осциллограммы непрерывного и квантованного сигналов Блоки Encoder и Decoder имеют одинаковые параметры настройки, из которых существенным является Bits (разрядность). По умолчанию разрядность равна 8 и 3 соответственно. При этом значении исследуемый процесс преобразования сигналов отличается самым низким качеством. Пользователь имеет возможность повысить разрядность до 32 бит. В схеме виртуального эксперимента отсутствует модель ЦВМ. Как элемент цифровой САУ (рисунок 15) ЦВМ выполняет алгоритмические функции и в процессе модуляции и демодуляции не участвует. Поэтому моделирование кодо-импульсной модуляции проводят с помощью названной схемы (рисунок 22).
Рисунок 23 – Осциллограммы непрерывного и квантованного сигналов Блоки Encoder и Decoder имеют одинаковые параметры настройки, из которых существенным является Bits (разрядность). По умолчанию разрядность равна 8 и 3 соответственно. При этом значении исследуемый процесс преобразования сигналов отличается самым низким качеством. Пользователь имеет возможность повысить разрядность до 32 бит. В схеме виртуального эксперимента отсутствует модель ЦВМ. Как элемент цифровой САУ (рисунок 15) ЦВМ выполняет алгоритмические функции и в процессе модуляции и демодуляции не участвует. Поэтому моделирование кодо-импульсной модуляции проводят с помощью названной схемы (рисунок 22).
- ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
- Ознакомиться с целью работы.
- Ознакомиться с основными понятиями о дискретных САУ, см.раздел 2.
6.3 Перечертить в отчет схему S-модели согласно рисунку 16. 6.4 Запустить последовательно MATLAB и SIMULINK. 6.5 Создать S-модель согласно рисунку 16. 6.6 Принять по умолчанию шаг квантования по уровню Quantization interval =0.5.
- Наблюдать изображения непрерывного и квантованного сигналов.
- Перечертить в отчет изображения названных сигналов длительностью в один период.
- Повторить виртуальный эксперимент, приняв шаг квантования по уровню 0.1. Выполнить указания 6.7-6.8.
- Перечертить в отчет схему, изображенную на рисунке 18.
- Заменить блок Quantizer S-модели на блок Relay.
- Настроить блок Relay, приняв порог включения 0.5 и порог выключения (-0.5), а также выходной сигнал реле в выключенном состоянии -1.
- Повторить виртуальный эксперимент, уменьшив порог включения до 0.1 и порог выключения до -0.1.
- Выполнить указания 6.7-6.8.
- Перечертить в отчет схему, изображенную на рисунке 20.
- Заменить блок Relay S-модели на блок Zero—OrderHold(ZOH).
- Принять по умолчанию при настройке блока ZOH период квантования по времени T=1.0.
- Выполнить указания 6.7-6.8.
- Перечертить в отчет схему, изображенную на рисунке 22.
- Принять по умолчанию при настройке блоков Encoder и Decoder разность Bits=8 и 3 соответственно.
- Выполнить указания 6.7-6.8.
- Повторить виртуальный эксперимент, увеличив разрядность до Bits =32.
- Выполнить указания 6.7-6.8.
- Закрыть SIMULINK и MATLAB.
- СВЕДЕНИЯ ОБ ИСПОЛЬЗОВАНИИ СИСТЕМЫ MATLAB
Методические указания к выполнению данной работы опираются на систему MATLAB 6.0 (Release 12) с пакетом расширения Simulink 4.0.
- CОДЕРЖАНИЕ ОТЧЕТА
- Цель работы.
- Схема S-модели, см. рисунок 16.
- Изображения непрерывного и квантованного по уровню сигналов (шаг квантования 0.5 и 0.1), см. рисунок 17.
- Схема S-модели, см. рисунок 18.
- Изображения непрерывного и квантованного по уровню сигналов (порог включения 0.5 и 0.1), см. рисунок 19.
- Схема S-модели, см. рисунок 20.
- Изображения непрерывного и квантованного по времени сигналов (период квантования T=1 и T=0.1), см. рисунок 21.
- Схема S-модели, см. рисунок 22.
- Изображения непрерывного и квантованного по времени и по уровню сигналов (разрядность 3 и 32 бита), см. рисунок 23.
- КОНТРОЛЬНЫЕ ВОПРОСЫ
- Какие САУ называют дискретными?
- Что понимают под дискретизацией (квантованием) сигналов?
- Каковы основные виды квантования сигналов?
- Каковы особенности процесса квантования сигнала по уровню?
- Каковы особенности процесса квантования сигнала по времени?
- Почему квантование сигнала по времени называют модуляцией?
- Каковы основные виды модуляции сигналов?
- Что понимают под амплитудно-импульсным модулятором?
- Каковы особенности кодо-импульсной модуляции?
- К какому виду квантования относят преобразование сигнала релейным элементом?
ЛИТЕРАТУРА
- Дьяконов В.П. Simulink 4. Специальный справочник.- СПБ.:Питер,2002.-528с.
- Зайцев Г.Ф. и др. Основы автоматического управления и регулирования .- 2-е изд., перераб. и доп. – К.: Техника, 1997.- С.307-310.
- Иванов В.А., Ющенко А.С. Теория дискретных систем автоматического управления.- М.: Наука, 1983.- С.9-18.
- Каганов В.Ю. и другие. Основы теории и элементы систем автоматического регулирования. – М.: Металлургия, 1987.- С.102-105.
- Ким Д.П. Теория автоматического управления. Т.1. Линейные системы.- М.:ФИЗМАТЛИТ, 2003.- С. 190-191, 207-209, 216-217.
- Попов Е.П. Теория нелинейных систем автоматического регулирования и управления.- М.:Наука, 1979.- С.214-216.
- Теория автоматического регулирования. В 3-х кн./ Под ред. В. В. Солодовникова. Кн.2: Анализ и синтез линейных непрерывных и дискретных систем автоматического регулирования / А.Н. Дмитриев и др.- М.: Машиностроение, 1967.- С.517-529.
- Теория автоматического управления: В 2-х ч. Ч.2. Теория нелинейных и специальных систем автоматического управления/ А.А. Воронов и др.; Под ред. Воронова А.А.- 2-е изд., перераб. и доп. –М.: Высш.шк.,1986.-С.73-77.
- Черных И.В. SIMULINK: среда создания инженерных приложений.- М.:ДИАЛОГ-МИФИ, 2003. -496с.
- Юревич Е.И. Теория автоматического управления.- 2-е изд., перераб. и доп.- СПб.:Энергия,1975.- С.250-251, 260-265, 283-284.
16