5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
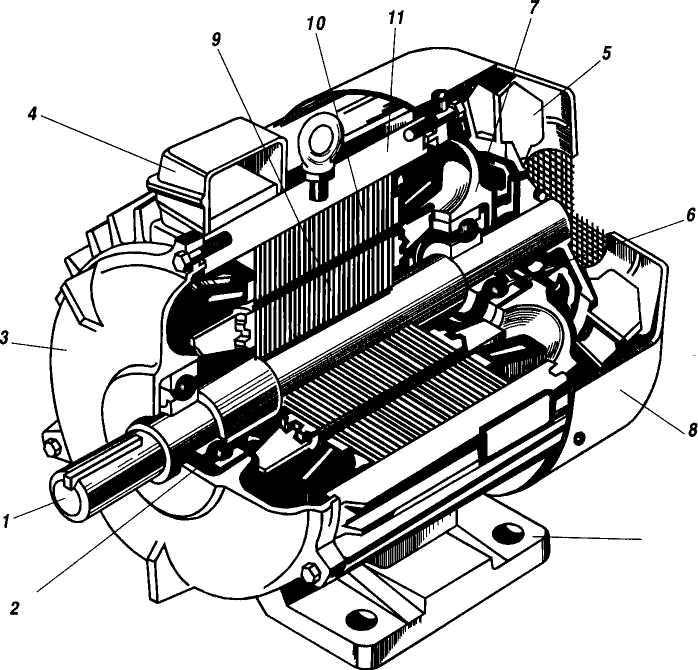
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
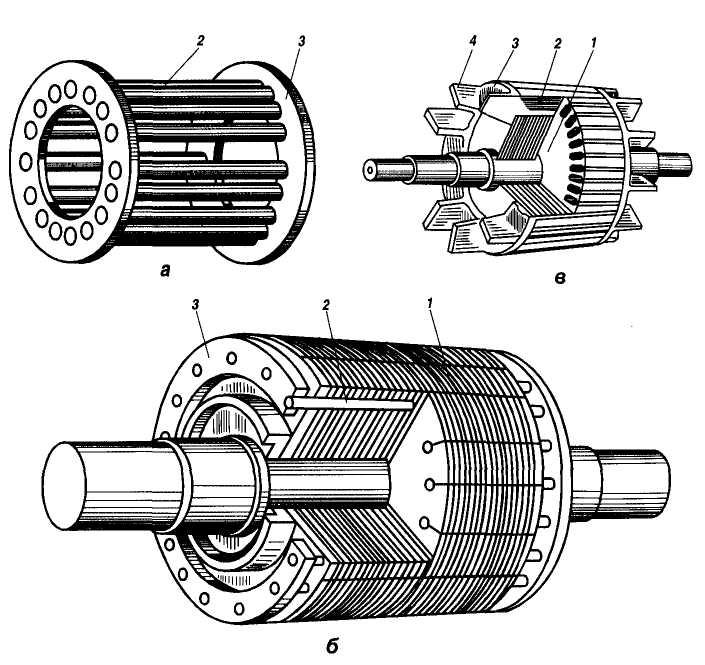
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
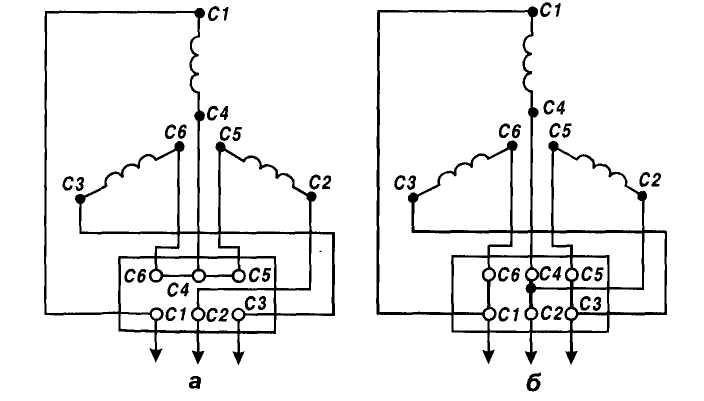
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.5.5, б.
В момент времени t0ток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
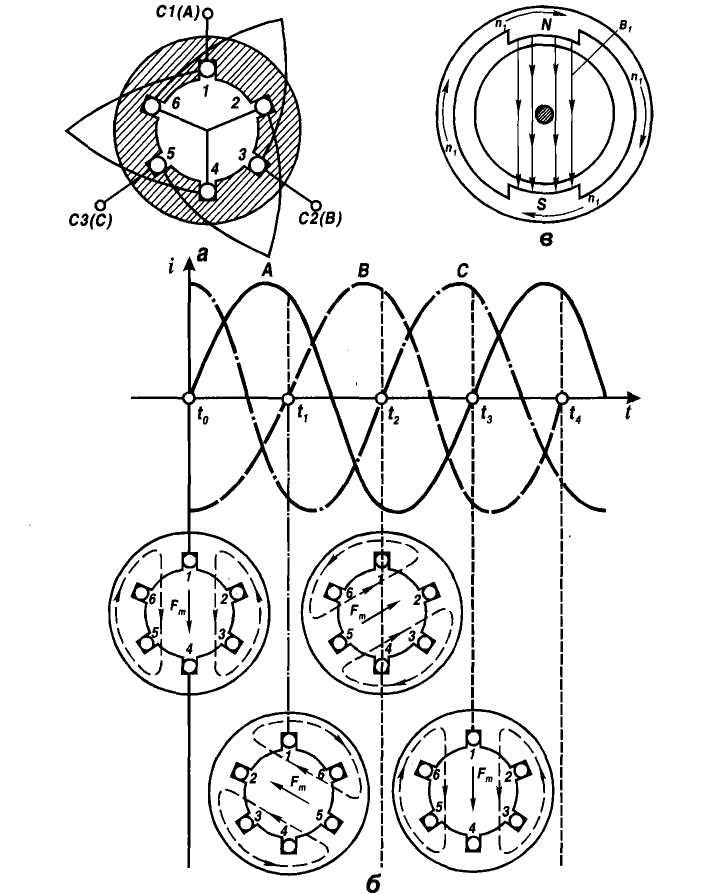
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с t0до t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойn0которая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
,
Зависимость n0 от р и f представлена в табл.5.2.
21. Устройство трехфазного асинхронного двигателя с фазным ротором.
Недостатком асинхронного двигателя с короткозамкнутым ротором является большой пусковой ток, который превышает номинальный ток в 5-7 раз.
Желая улучшить пусковые характеристики асинхронного двигателя, М. О. Доливо-Добровольский разработал двигатель с фазным ротором.
Асинхронный двигатель с фазным ротором имеет обычный для асинхронных двигателей статор с трехфазной сетевой обмоткой, но на поверхности ротора также находится трехфазная обмотка. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные их концы соединяются с тремя изолированными друг от друга контактными кольцами, укрепленными на валу машины и изолированными от него (рис. 8.6). Поэтому асинхронный двигатель с фазным ротором называют также асинхронным двигателем с контактными кольцами.
Контактные кольца соприкасаются со щетками, установленными в неподвижных щеткодержателях. Через кольца и щетки обмотка ротора замыкается на пусковой трехфазный реостат, который изменяет активное сопротивление обмотки ротора в момент пуска. Обмотка статора такого двигателя включается непосредственно в трехфазную сеть (рис. 8.7).

Эта система используется либо для пуска (для уменьшения пускового тока при одновременном сохранении вращающего момента), либо для регулирования скорости вращения ротора двигателя. После разгона ротора пусковой реостат выключается, и обмотка закорачивается с помощью специального центробежного автоматического замыкателя. Для уменьшения потерь на трение в некоторых двигателях с фазным ротором имеются приспособления для отвода щеток от контактных колец после их замыкания.
Одним из важнейших достоинств асинхронного двигателя с фазным ротором является то, что в момент пуска создается большой вращающий момент при значительно меньших, чем у короткозамкнутых двигателей, пусковых токах. Объясняется это тем, что асинхронный двигатель при пуске развивает максимальный вращающий момент тогда, когда активное сопротивление ротора будет равно индуктивному сопротивлению двигателя. А так как у двигателей с фазным ротором активное сопротивление ротора можно изменять с помощью пускового реостата, то и пусковые характеристики их значительно лучше, чем у двигателей с короткозамкнутым ротором.
Пуск асинхронного двигателя с фазным ротором производится следующим образом. Пусковой реостат устанавливается на холостую клемму (цепь ротора разомкнута), а на статор подается сетевое напряжение. Затем включается пусковой реостат, и его сопротивление постепенно уменьшают и делают равным нулю, когда двигатель приобретет номинальную скорость. Пусковой ток двигателя с фазным ротором превышает номинальный всего в 1,5-2 раза. Кроме того, включение в цепь ротора пускового реостата значительно увеличивает вращающий момент.
Сущность процесса регулирования скорости асинхронного двигателя с фазным ротором при помощи регулировочного реостата сводится к следующему. Ротор двигателя обладает определенной инерцией, и поэтому сразу после введения
реостата его скорость и индуцируемая в роторе ЭДС Е2 в
начальный момент остаются неизменными. Увеличение сопротивления пускового реостата в цепи ротора вызывает
уменьшение тока ротора 12, что приводит к уменьшению вращающего момента (см. формулу (8.3)). Вследствие этого скорость вращения ротора п2 начнет уменьшаться. Уменыпение скорости п2 аналогично увеличению скольжениям, вследствие чего индуцируемая в роторе ЭДС Е2, пропорциональная s, также начнет расти, вызывая увеличение тока ротора I2. Рост тока I2 и уменьшение скорости вращения ротора п2
будет продолжаться до тех пор, пока ток I2 не достигнет своего прежнего значения. В этом случае вращающий момент снова станет равным статическому, и двигатель начнет вращаться с постоянной скоростью, величина которой будет уже несколько меньше, чем до введения реостата. Регулировка скорости асинхронного двигателя с фазным ротором может осуществляться только в сторону уменьшения оборотов.
§77. Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором (рис. 258 и 259) применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой (краны, лифты и пр.). В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата (см. § 80).
В двигателе с фазным ротором статор выполнен так же, как и в двигателе с короткозамкнутым ротором. На роторе же расположена трехфазная обмотка, состоящая из трех, шести, девяти и т. д. катушек (в зависимости от числа полюсов машины), сдвинутых одна относительно другой на 120° (в двухполюсной машине), 60° (в четырехполюсной) и т. д. Числа полюсов обмоток статора и ротора берутся одинаковыми.
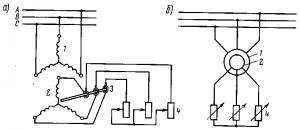
Рис. 258. Электрическая схема асинхронного двигателя с фазным ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор; 3 — контактные кольца со щетками; 4 — пусковой реостат

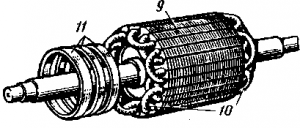 Рис. 259. Основные конструктивные узлы асинхронного двигателя с фазным ротором: 1 — приспособление для подъема щеток; 2, 12 —- подшипниковые щиты; 3 — щеткодержатели; 4 — траверса; 5 — обмотка статора; 6 — остов; 7 — сердечник статора; 8 — коробка с выводами; 9 — сердечник ротора; 10 — обмотка ротора; 11 — контактные кольца
Рис. 259. Основные конструктивные узлы асинхронного двигателя с фазным ротором: 1 — приспособление для подъема щеток; 2, 12 —- подшипниковые щиты; 3 — щеткодержатели; 4 — траверса; 5 — обмотка статора; 6 — остов; 7 — сердечник статора; 8 — коробка с выводами; 9 — сердечник ротора; 10 — обмотка ротора; 11 — контактные кольца
Обмотку фазного ротора обычно соединяют «звездой». Концы ее присоединяют к трем контактным кольцам, к которым посредством щеток подключают трехфазный пусковой реостат, т. е. в каждую фазу ротора в момент пуска вводят дополнительное активное сопротивление.
Для уменьшения износа контактных колец и щеток двигатели с фазным ротором иногда снабжают приспособлениями 1 (см. рис. 259) для подъема щеток и замыкания колец накоротко после выключения реостата.
§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
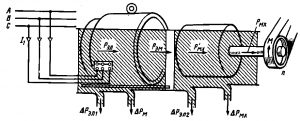
Рис. 260. Энергетическая диаграмма асинхронного двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Рмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора. Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cos?2 (здесь ?2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора). Поэтому
M = cмФтI2 cos?2 (84)
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге ?2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол ?2. Электромагнитный момент М зависит от скольжения s.
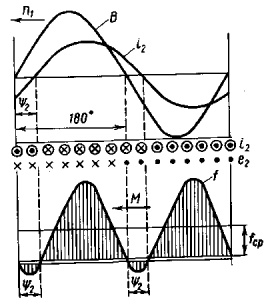
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos ?2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Асинхронные электродвигатели с фазным ротором
В настоящее время, на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. К ним относятся и трехфазные асинхронные двигатели.
Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п.
Достоинства асинхронных электродвигателей
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором

Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме »звезда» или «треугольник» в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют «звездой». Если же напряжение сети 220 В, то обмотки соединяют в «треугольник». В обоих случаях фазное напряжение двигателя равно 220 В.
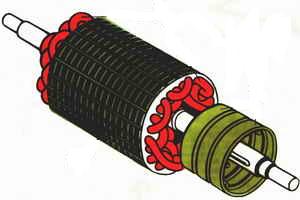
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.
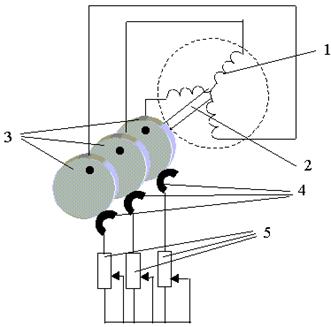
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).
Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей
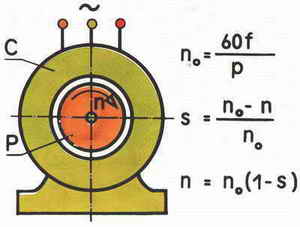
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1
Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: