8.2 Системы автоматического регулирования (сар)
Основное назначение САР заключается в поддержании выходных параметров объекта автоматизации на определенном заданном уровне или изменение этих параметров по определенному закону.
Как и системы автоматического управления системы регулирования бывают также разомкнутыми и замкнутыми, т.е. с элементами обратной связи и без них.
Так в разомкнутых системах регулирования для компенсации вредных возмущающих воздействий, действующих на объект автоматизации, часто используют специальные корректирующие устройства — КУ, подключаемые на вход системы согласно рис.8.3.

хку
Рис. 8.3 Структура САР с корректирующим устройством
Здесь самый первый элемент на входе системы регулирования выполняет функции суммирующего устройства , которое вырабатывает сигнал х1, равный сумме входного сигнала хвх и сигнала, поступающего с корректирующего устройства. С учетом этого возмущающего воздействия и входного сигнала и САР вырабатывает соответствующий сигнал регулирования хр для дальнейшего воздействия на объект регулирования.
Но все возмущающие воздействия в разомкнутой системе скомпенсировать не удается. Поэтому большинство современных систем и регулирования и управления структурно строятся, в основном, замкнутыми, т.е. с использованием обратной связи – ОС (рис.8.4).

хос
Рис.8.4. Структурная схема замкнутой САР
С помощью обратной связи в таких системах осуществляется постоянный контроль выходных параметров объекта управления или регулирования и вырабатывается соответствующий сигнал обратной связи хос, поступающий на элемент сравнения, где он непрерывно сравнивается с входной величиной хвх , поступающего с задающего устройства, и вырабатывается разностный сигнал ∆х = хвх – хос и, в соответствии с этим, сигналом хр система регулирования воздействует на объект автоматизации.
В некоторых случаях системы автоматического регулирования структурно строятся комбинированными, т.е. с компенсацией ошибок, в которых используются два принципа регулирования — по замкнутому и по разомкнутому циклу регулирования (рис.8.5).
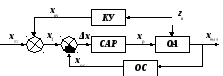

Рис.8.5. Структурная схема комбинированной САР
Но такие системы более сложные, что требует кроме материальных затрат на их изготовление и более дорогое их обслуживание. Так на рис.8.6 представлена наиболее полная структура большинства систем автоматического регулирования и управления с функциональной взаимосвязью всех элементов, составляющих эти системы. Подобная, достаточно сложная, структура таких систем используется, чтобы обеспечить их устойчивость и более высокие показатели качества при эксплуатации.

РРис.8.6. Структурная схема систем автоматического
управления и регулирования
ЗУ – задающее устройство, с помощью которого устанавливается требуемое значение выходных параметров на объекте автоматизации ОА (управления или регулирования).
КУ1 – корректирующее устройство для компенсации возмущающего воздействия zв на объект автоматизации.
ИЭ – исполнительный элемент, оказывающий непосредственное воздействие на объект автоматизации.
ГОС – главная обратная связь, с помощью которой осуществляется постоянный контроль выходных параметров объекта автоматизации хвых.
У – усилитель, предназначенный для усиления сигнала х2..
МОС – местная обратная связь (параллельное корректирующее устройство) для улучшения качества используемого в системе усилителя.
КУ2 – последовательное корректирующее устройство для дополнительной обработки сигнала ошибки ∆х.
Однако, при дальнейшем рассмотрении систем автоматического регулирования (а также управления) за их основу примем более общую (ключевую) структурную схему (рис.8.7), составленную только из основных функциональных узлов, таких как: задающее устройство ЗУ, элемент сравнения ЭС, усилитель У, если он необходим, исполнительный элемент ИЭ и элемент обратной связи ОС.
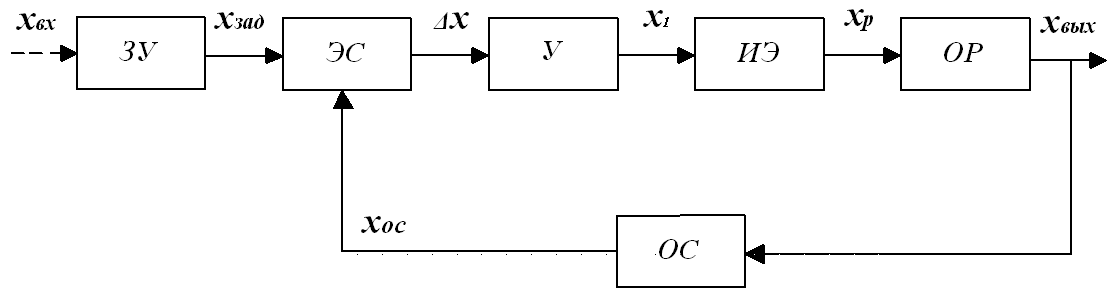
Рис.8.7. Структурная схема системы автоматического управления и регулирования, представленная только основными элементами.
В зависимости от назначения и работы все системы автоматического регулирования делятся на следующие три основные классификационные группы:
1. Системы автоматической стабилизации, в которых выходная величина на объекте автоматизации поддерживается постоянной.
2. Системы программного регулирования. В таких системах выходные параметры объекта автоматизации изменяются по заранее составленной программе. При этом сама программа может задаваться либо с помощью специальных копиров или чертежей, либо, чаще всего, в цифровом виде с использованием современных носителей информации.
3. Следящие системы, в которых закон изменения входной величины хвх, поступающей на вход задающего устройства, заранее неизвестен и может в процессе работы непрерывно изменяться в зависимости от окружающих условий. Но при этом система регулирования должна следить за этими изменениями и в соответствии с ними регулировать выходные параметры объекта автоматизации.
Перечисленная классификация систем автоматического регулирования, в конечном счёте, определяется характером задающего устройства, используемого в системе. Так в системах автоматической стабилизации задающее устройство вырабатывает постоянный по величине сигнал ( хзад = const ).
В системах программного регулирования сигнал с задающего устройства изменяется ( х зад = var ), но по заранее составленной определенной программе.
В следящих системах величина заданного сигнала зависит от неизвестного по величине входного воздействия, поступающего на вход задающего устройства. А система регулирования, в результате, определяет это воздействие (т.е. отслеживает его) и вырабатывает соответствующий сигнал регулирования — хр в соответствии с законом изменения этого входного воздействия.
8.2 Системы автоматического регулирования (сар)
Основное назначение САР заключается в поддержании выходных параметров объекта автоматизации на определенном заданном уровне или изменение этих параметров по определенному закону.
Как и системы автоматического управления системы регулирования бывают также разомкнутыми и замкнутыми, т.е. с элементами обратной связи и без них.
Так в разомкнутых системах регулирования для компенсации вредных возмущающих воздействий, действующих на объект автоматизации, часто используют специальные корректирующие устройства — КУ, подключаемые на вход системы согласно рис.8.3.

хку
Рис. 8.3 Структура САР с корректирующим устройством
Здесь самый первый элемент на входе системы регулирования выполняет функции суммирующего устройства , которое вырабатывает сигнал х1, равный сумме входного сигнала хвх и сигнала, поступающего с корректирующего устройства. С учетом этого возмущающего воздействия и входного сигнала и САР вырабатывает соответствующий сигнал регулирования хр для дальнейшего воздействия на объект регулирования.
Но все возмущающие воздействия в разомкнутой системе скомпенсировать не удается. Поэтому большинство современных систем и регулирования и управления структурно строятся, в основном, замкнутыми, т.е. с использованием обратной связи – ОС (рис.8.4).

хос
Рис.8.4. Структурная схема замкнутой САР
С помощью обратной связи в таких системах осуществляется постоянный контроль выходных параметров объекта управления или регулирования и вырабатывается соответствующий сигнал обратной связи хос, поступающий на элемент сравнения, где он непрерывно сравнивается с входной величиной хвх , поступающего с задающего устройства, и вырабатывается разностный сигнал ∆х = хвх – хос и, в соответствии с этим, сигналом хр система регулирования воздействует на объект автоматизации.
В некоторых случаях системы автоматического регулирования структурно строятся комбинированными, т.е. с компенсацией ошибок, в которых используются два принципа регулирования — по замкнутому и по разомкнутому циклу регулирования (рис.8.5).
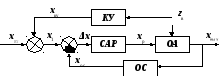

Рис.8.5. Структурная схема комбинированной САР
Но такие системы более сложные, что требует кроме материальных затрат на их изготовление и более дорогое их обслуживание. Так на рис.8.6 представлена наиболее полная структура большинства систем автоматического регулирования и управления с функциональной взаимосвязью всех элементов, составляющих эти системы. Подобная, достаточно сложная, структура таких систем используется, чтобы обеспечить их устойчивость и более высокие показатели качества при эксплуатации.

РРис.8.6. Структурная схема систем автоматического
управления и регулирования
ЗУ – задающее устройство, с помощью которого устанавливается требуемое значение выходных параметров на объекте автоматизации ОА (управления или регулирования).
КУ1 – корректирующее устройство для компенсации возмущающего воздействия zв на объект автоматизации.
ИЭ – исполнительный элемент, оказывающий непосредственное воздействие на объект автоматизации.
ГОС – главная обратная связь, с помощью которой осуществляется постоянный контроль выходных параметров объекта автоматизации хвых.
У – усилитель, предназначенный для усиления сигнала х2..
МОС – местная обратная связь (параллельное корректирующее устройство) для улучшения качества используемого в системе усилителя.
КУ2 – последовательное корректирующее устройство для дополнительной обработки сигнала ошибки ∆х.
Однако, при дальнейшем рассмотрении систем автоматического регулирования (а также управления) за их основу примем более общую (ключевую) структурную схему (рис.8.7), составленную только из основных функциональных узлов, таких как: задающее устройство ЗУ, элемент сравнения ЭС, усилитель У, если он необходим, исполнительный элемент ИЭ и элемент обратной связи ОС.

Рис.8.7. Структурная схема системы автоматического управления и регулирования, представленная только основными элементами.
В зависимости от назначения и работы все системы автоматического регулирования делятся на следующие три основные классификационные группы:
1. Системы автоматической стабилизации, в которых выходная величина на объекте автоматизации поддерживается постоянной.
2. Системы программного регулирования. В таких системах выходные параметры объекта автоматизации изменяются по заранее составленной программе. При этом сама программа может задаваться либо с помощью специальных копиров или чертежей, либо, чаще всего, в цифровом виде с использованием современных носителей информации.
3. Следящие системы, в которых закон изменения входной величины хвх, поступающей на вход задающего устройства, заранее неизвестен и может в процессе работы непрерывно изменяться в зависимости от окружающих условий. Но при этом система регулирования должна следить за этими изменениями и в соответствии с ними регулировать выходные параметры объекта автоматизации.
Перечисленная классификация систем автоматического регулирования, в конечном счёте, определяется характером задающего устройства, используемого в системе. Так в системах автоматической стабилизации задающее устройство вырабатывает постоянный по величине сигнал ( хзад = const ).
В системах программного регулирования сигнал с задающего устройства изменяется ( х зад = var ), но по заранее составленной определенной программе.
В следящих системах величина заданного сигнала зависит от неизвестного по величине входного воздействия, поступающего на вход задающего устройства. А система регулирования, в результате, определяет это воздействие (т.е. отслеживает его) и вырабатывает соответствующий сигнал регулирования — хр в соответствии с законом изменения этого входного воздействия.
3. Система автоматического регулирования
Автоматическое регулирование – поддержание постоянного значения какого-либо параметра в технологическом процессе с заданной точностью или изменение его по определенному закону без непосредственного участия человека.
Совокупность средств, обеспечивающих автоматическое регулирование, называется системой автоматического регулирования (САР). По принципу регулирования все системы могут быть разделены на две группы [1,20]. Первая группа основана на принципе регулирования по отклонению регулируемой величины от заданного значения. В этом случае отклонение регулируемой величины является причиной действия регулирующего органа, которое должно быть направлено на уменьшение этого отклонения. САР по отклонению является замкнутой.
Вторая группа основана на принципе регулирования по возмущению. САР по возмущению является разомкнутой. Обычно в САР вводятся возмущающие воздействия, вызванные основной причиной. В комбинированном регулировании осуществляется применение обоих принципов. Это регулирование особенно эффективно при построении сложных САР высокой точности.
В системах ТГиВ основными регулируемыми физическими параметрами могут быть:
– температура горячей воды и мазута в трубопроводах, а также воздуха и его относительной влажности в помещении;
– давление газа в газопроводах, пара и воды в тепловых сетях;
– расход газа, пара и воды в системах газа — и теплоснабжения потребителей;
– уровень воды и конденсата в закрытых резервуарах под давлением;
– производительность насосов, вентиляторов, и дымососов при автоматизации котельных установок и других технологических процессов.
Для примера на рис. 3.1 представлена функциональная схема замкнутой САР температуры воздуха в помещении.
В САР (рис. 3.1) может быть применен трехпозиционный регулятор температуры ТЭ2П3 с искробезопасным входом, работающий с медным термопреобразователем сопротивления ТСМ 0879 (градуировки 50М).

Рис. 3.1. Функциональная схема САР температуры воздуха в помещении: ЗЭ – задающий элемент; ЭС– элемент сравнения; У – усилитель; ИМ – исполнительный механизм; РО – регулирующий орган; ОР – объект регулирования; ОС – обратная связь по положению вала ИМ; ИП – измерительный преобразователь (датчик температуры); tз – заданная температура воздуха в помещении; g – задающее воздействие (напряжение U1); х – сигнал ошибки (напряжение);хр – регулирующее воздействие; у – регулируемая величина (действительная температура tд воздуха в помещении); U2 – напряжение, соответствующее действительному значению регулируемой величины у; f – возмущающее воздействие
В схеме предусмотрены две отрицательные обратные связи: главная и дополнительная. Главная обратная связь выполнена с помощью измерительного преобразователя ИП. Она передает сигнал с выхода на вход системы и действует как в установившемся так и переходном режиме системы. Дополнительная обратная связь ОС выполнена с помощью реостатного датчика ИМ. Она действует только во время переходного процесса и предназначена для корректирования переходного процесса.

Принцип действия САР, работающей по отклонению заключается в следующем. При отклонении температуры воздуха в помещении от заданной в элементе сравненияЭС вырабатывается сигнал ошибки

,
который в виде разности напряжений


подается на усилитель У и далее на исполнительный механизм ИМ. Двигатель ИМ начинает вращаться в соответствующую сторону и путем перемещения регулирующего органа РО (клапана на теплоносителе) оказывает регулирующее воздействие на объект регулирования ОР (приточная камера + помещение). После отработки ошибки двигательИМ останавливается. При этом температура воздуха в помещении приближается к заданной в пределах определенной статической ошибки. САР называется линейной, если она составлена из линейных элементов.
Классификация САР. В зависимости от характера задающего воздействия САР, применяемые в системах ТГиВ можно разделить на системы автоматической стабилизации, программного регулирования и следящие системы.
Системы автоматической стабилизации (рис. 3.2а) предназначены для поддержания постоянного значения регулируемой величины у(t). Например, температуры, давления, расхода, уровня, относительной влажности и др. В этих системах задающее воздействие g(t)=const. Основной задачей систем стабилизации является борьба с вредным влиянием возмущений, стремящихся отклонить регулируемую величину у(t) от требуемого значения g(t)=const..
Системы программного регулирования (рис. 3.2б) предназначены для изменения регулируемой величины у(t) во времени по заранее разработанной программе. Примером может быть САР температуры зрительных залов кинотеатров и др. В этих системах задающее воздействие g(t) не является постоянной величиной.

Рис. 3.2. Типы САР в системах ТГиВ
Следящие системы (рис. 3.2в )предназначены для изменения регулируемой величины у(t) по закону, который неизвестен. В таких системах регулирования задающее воздействие g(t) представляет собой случайную функцию времени. Примером следящей системы может быть САР температуры воды в теплофикационной сети, устанавливаемой в зависимости от температуры наружного воздуха.
Системы прямого и непрямого регулирования. В зависимости от наличия дополнительных источников энергии все замкнутые САР делятся на системы прямого и непрямого регулирования.
Системы, в которых регулирующий орган перемещается непосредственно чувствительным элементом, называются системами прямого регулирования (рис. 3.3а).В этих системах перемещение регулирующего органа (клапана 3) осуществляется за счет энергии объекта (уровня жидкости). Область применения систем прямого регулирования ограничивается объектами регулирования небольшой мощности, в которых для перемещения регулирующего органа не требуется значительных усилий.
В систему непрямого регулирования (рис. 3.3б) дополнительно входит устройство, позволяющее усилить сигнал ошибки по мощности. В этой системе роль усилительного устройства выполняет реверсивный электродвигатель 4, который посредством кинематической передачи перемещает клапан 3. В системах непрямого действия можно применять высокоточные маломощные чувствительные элементы для управления работой объектов большой мощности. При этом точность регулирования резко возрастает. Поэтому САР непрямого действия находят более широкое применение, по сравнению с САР прямого действия.

Рис. 3.3. Статический (а) и астатический (б) регуляторы уровня: 1 – поплавок; 2 – условное обозначение регулятора уровня; 3 – регулирующий клапан; 4 – электродвигатель
Статические и астатические системы. В зависимости от свойств системы регулирования в установившемся режиме различают статические и астатические САР. В основе принципа такого деления лежит точность поддержания постоянства регулируемой величины при наличии нагрузки (возмущения).
Статической называется такая САР, в которой регулируемая величина определяется остаточным (статическим) отклонением и зависит от возмущения. Примером статической САР является статический регулятор уровня (рис. 3.3а).
При заданном уровне жидкости L клапан 3 занимает положение, соответствующее равенству притока и расхода жидкости (Fп = Fр). Если расход Fр увеличивается, уровень L жидкости в резервуаре понижается, поплавок 1 опускается и клапан 3 увеличивает приток жидкости Fп до тех пор, пока приток не станет, равен расходу. При повышении уровня открытие клапана уменьшается. Поэтому каждому расходу жидкости в установившемся режиме соответствует определенное положение клапана и новое значение уровня.

Следовательно, статической системе присуща статическая ошибка , которая увеличивается с ростом приложенного возмущенияFр (см. рис. 3.4).
Рис. 3.4. Переходный процесс (а) и статическая
характеристика (б) при статическом регулировании
Статическое регулирование характеризуется пропорциональной зависимостью между регулируемым параметром и перемещением регулирующего органа и поэтому называется пропорциональным или П – регулированием.
Статические САР применяются в таких системах, где не требуется высокая точность поддержания регулируемого физического параметра. В системах ТГиВ такие системы применяются для регулирования уровня жидкости, давления, расхода и температуры.
Астатической САР называется такая система регулирования, которая в установившемся режиме работает без остаточного отклонения. К астатической САР можно отнести астатический регулятор, приведенный на рис. 3.3б.

При заданном уровне жидкости в резервуаре, то есть когда притокFп равен расходу Fр на электродвигатель 4 не поступает сигнал от регулятора уровня 2. Если расход Fр увеличивается, то уровень жидкости в резервуаре снижается, и поплавок 1 опускается вниз. В этот момент регулятор уровня подает сигнал на электродвигатель, который начинает вращаться в сторону, соответствующую открытию клапана 3, увеличивая приток жидкости в резервуар. Процесс регулирования длится до тех пор, пока приток жидкости не станет равным ее расходу. В этот момент электродвигатель остановится и регулирование прекратится. Значение регулируемой величины (уровень) станет равным заданному значению. При уменьшении расхода происходит обратный процесс.
Кривая переходного процесса при астатическом регулировании приведена на рис. 3.5.

Рис. 3.5. Переходный процесс (а) и статическая характеристика (б) при астатическом регулировании
В астатической системе регулирования при различных по величине возмущающих воздействиях отклонение регулируемого параметра по окончании переходного процесса становится равным нулю.
Преимуществом астатического вида регулирования является его свойство поддерживать регулируемый параметр точно на заданном уровне.
Недостатком является затяжка процесса регулирования и перерегулирование.
Несмотря на указанные недостатки астатическое регулирование (И – регулирование) часто применяется в системах ТГиВ.
Что такое сар в автоматизации
13. Системы автоматического регулирования
Все рисунки, за исключением рис.102, выполнены автором .
Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом.
Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования.
Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра.
Пример системы регулирования температуры
На Рис. 87 показана блок схема системы регулирования температуры в объекте, а на Рис. 88 функциональная схема САР, показывающая общий принцип работы любой системы автоматического регулирования.
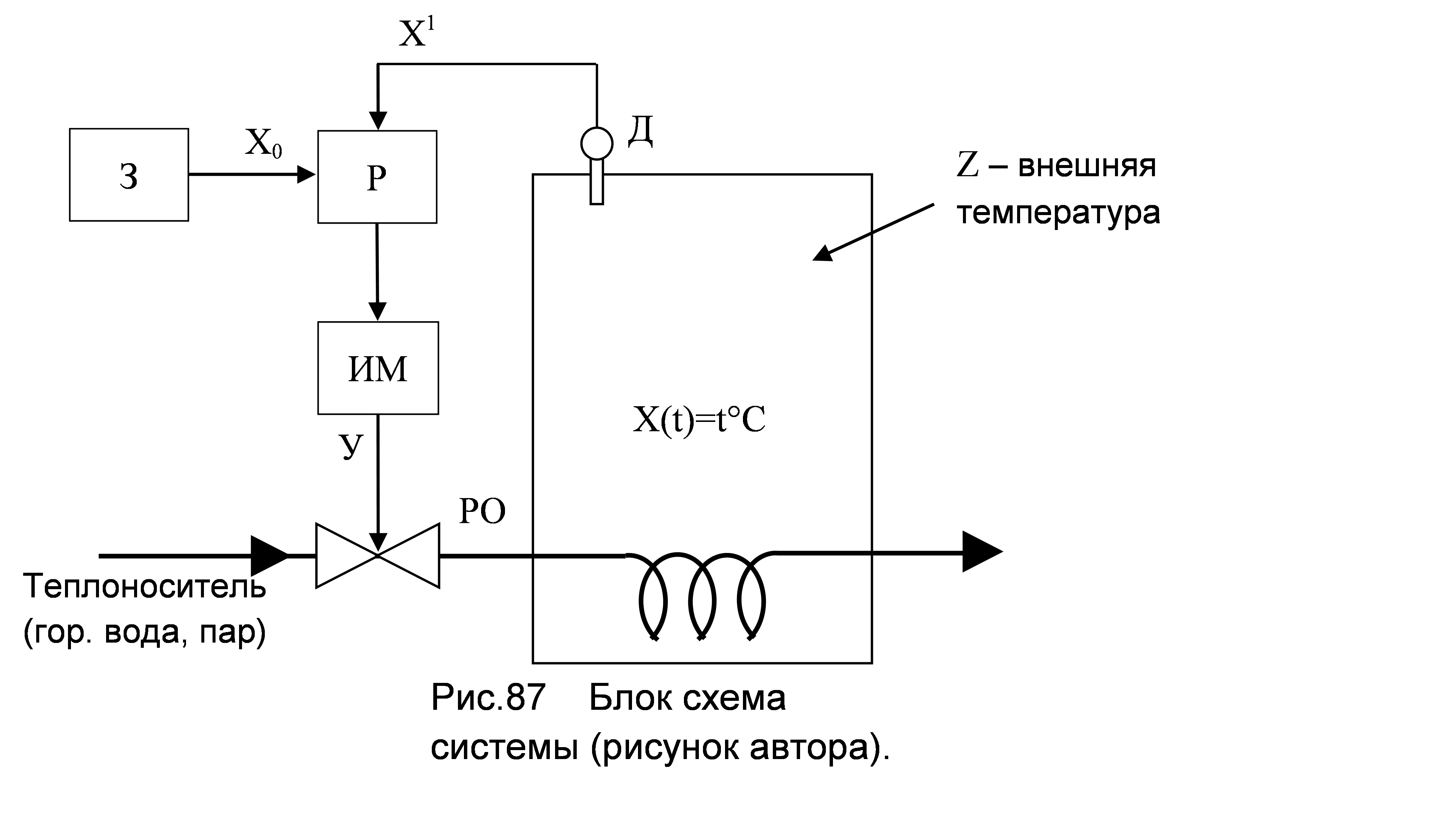
Если температура в объекте равна заданной, то сигнал с датчика X 1 равен сигналу с задатчика X0 и сигнал ошибки на входе регулятора е = X 1 — X0 = 0 QUOTE , сигнала на выходе регулятора нет, ИМ не работает и клапан открыт на заданную величину, поддерживая заданную температуру. Если, например, температура в объекте увеличиться, увеличиться сигнал с датчика X 1 , возникнет ошибка «е», заработает ИМ и, прикроет клапан РО для уменьшения подачи тепла, температура в объекте уменьшится до заданной.
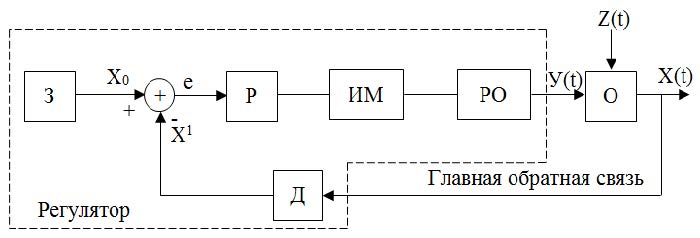
Рис. 88 Функциональная схема САР
З – задатчик, для установки заданного значения параметра X0
Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных систем)
ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.)
РО – регулирующий орган (кран, вентиль, заслонка и др.)
О – объект регулирования (печь, эл. мотор, резервуар и др.)
У – регулирующее (управляющее) воздействие
Z – помеха (возмущение)
Х – регулируемый параметр
X 1 – сигнал на выходе датчика
е = X 1 — X0 ошибка, возникает при отклонении параметра от задания
X0 – заданное значение регулируемого (управляемого) параметра может быть постоянным X0 или изменяемым (Ut).
Сигнал с задатчика может быть:
-постоянным X0 = const . для поддержание постоянства регулируемого параметра температуры, давления, уровня жидкости и т. д. (системы стабилизации);
-может изменяться во времени U(t) по определённой программе (программное регулирование);
-может изменяться во времени U(t) в соответствии с измеряемым внешним процессом (следящее регулирование).
Контрольные вопросы
1.От каких воздействий может измениться регулируемый параметр?
2.Как действует обратная связь, и для чего она нужна?
3.Какие функции выполняют Д и ИМ?
4.Как действует система при возникновении ошибки «е»?
5.Приведите пример системы стабилизации и следящей системы?