5.4.2. Индуктивные преобразователи
Индуктивные преобразователи отличаются высокой точностью, пригодны для ведения дистанционных измерений. Сравнительно небольшие габаритные размеры индуктивных преобразователей позволяют создать компактные измерительные устройства. Единый источник энергии дает существенное преимущество перед пневматическими приборами, для которых требуется питание и электрическим током, и сжатым воздухом.
В индуктивных преобразователях используется свойство катушки изменять свое реактивное сопротивление при изменении некоторых ее параметров, определяющих индуктивность L.
Для получения возможно большей индуктивности катушку, как правило, выполняют с магнитопроводом из ферромагнитного материала. Как известно из электротехники, сопротивление такой катушки (без учета потерь на гистерезис и вихревые токи в сердечнике):
где – сопротивление катушки постоянному току, Ом;
– индуктивное сопротивление, Ом;
– круговая частота питающего напряжения, ;
w – число витков катушки;
Rм – сопротивление магнитной цепи катушки, 1/Гн.
Обычно один из элементов магнитной цепи (рис. 5.14) выполняется подвижным (якорь), и его положение относительно неподвижной части будет влиять на магнитное сопротивление цепи Rм, а следовательно, и индуктивное сопротивление катушки.
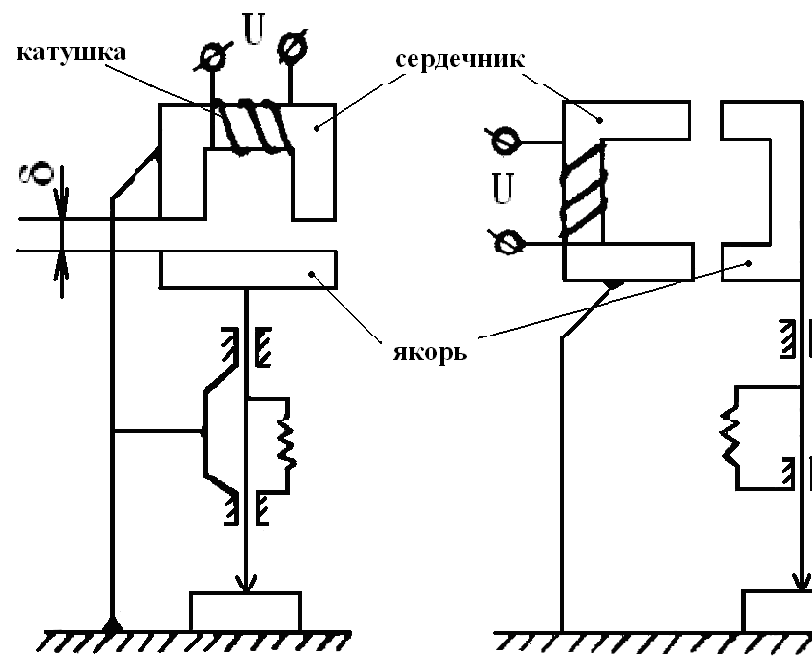
Рисунок 5.14 – Схемы индуктивных преобразователей дроссельного типа
Если связать перемещение якоря с измеряемой линейной величиной при постоянных параметрах напряжения питания, то возникает функциональная зависимость между зазором и электрическим сопротивление :
Индуктивный прибор может быть представлен следующей принципиальной схемой (рисунок 5.15), где ИП – индуктивный преобразователь, ИС – измерительная схема, служащая для преобразования сигнала, ИП в удобный для измерения другой электрический параметр (напряжение, сила тока), У – электронный усилитель (если в этом есть необходимость), О – отсчетное устройство, К – устройство формирования управляющих команд, П – источник питания.
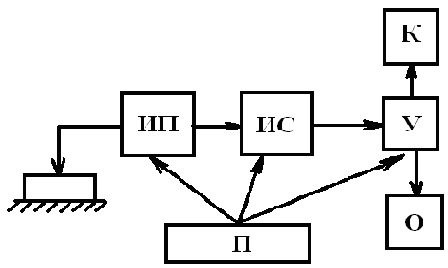
Рисунок 5.15 – Принципиальная схема индуктивного прибора
Общее передаточное отношение индуктивного прибора K будет равно:
где – передаточное отношение преобразователя;
или – передаточное отношение измерительной схемы;
Uвс и Iвс – напряжение и ток на выходе схемы;
– передаточное отношение (коэффициент усиления) усилителя;
U – выходное напряжение усилителя;
– передаточное отношение отсчетного устройства;
Выражение (5.5) может быть представлено в виде
При построении индуктивного прибора особо важным является правильный выбор параметров и принципиальной схемы индуктивного преобразователя.
В применяемых в настоящее время индуктивных преобразователях изменение индуктивного сопротивления катушки чаще всего достигается посредством изменения величины воздушного зазора между якорем и неподвижной частью сердечника катушки (рисунок 5.14, а) или изменением площади зазора (рисунок 5.14, б).
Характеристика преобразователя (рисунок 5.16, а) нелинейная, но если ограничить рабочий участок преобразователя , то можно считать, с некоторой погрешностью, что передаточное отношение постоянно. Передаточное отношение преобразователя возрастает по мере уменьшения зазора.
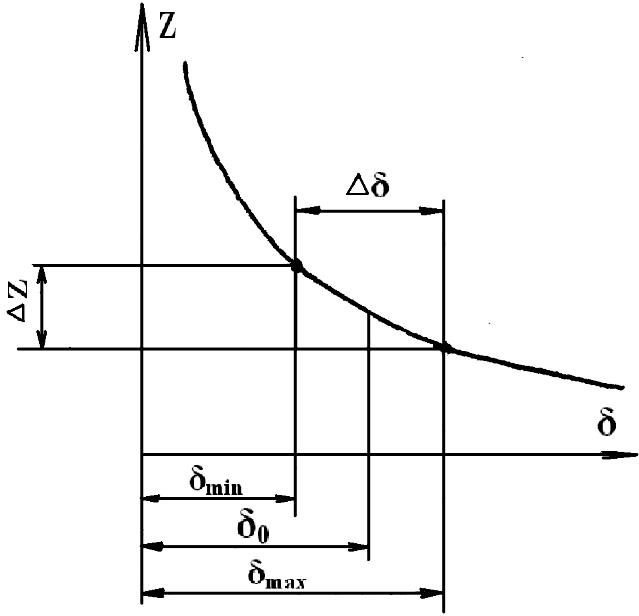
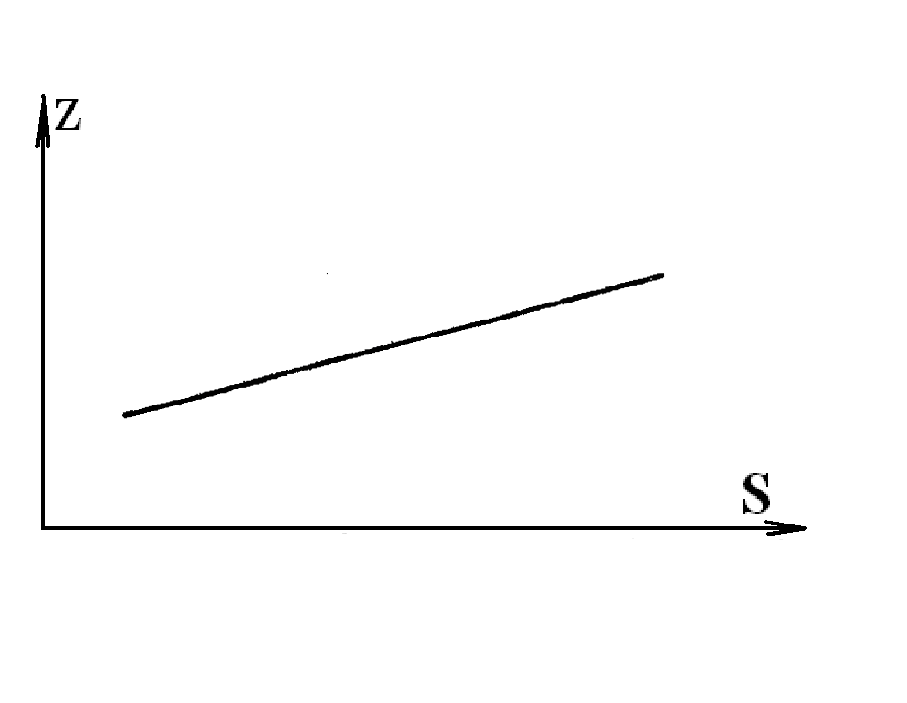
Рисунок 5.16 – Статические характеристики преобразователей
С целью получения более линейной зависимости, не уменьшая величины , применяют индуктивные преобразователи, принцип действия которых показан на рисунке 5.17, а. Преобразователь имеет две магнитные цепи с общим якорем. Под действием измеряемой величины оба зазора изменяются одинаково, но с различными знаками. Такой преобразователь обычно называют дифференциальным.
При соответствующем включении обеих катушек в измерительную схему дифференциальный преобразователь имеет примерно в два раза большую чувствительность и менее чувствителен к колебаниям окружающей температуры, питающего напряжения и его частоты.
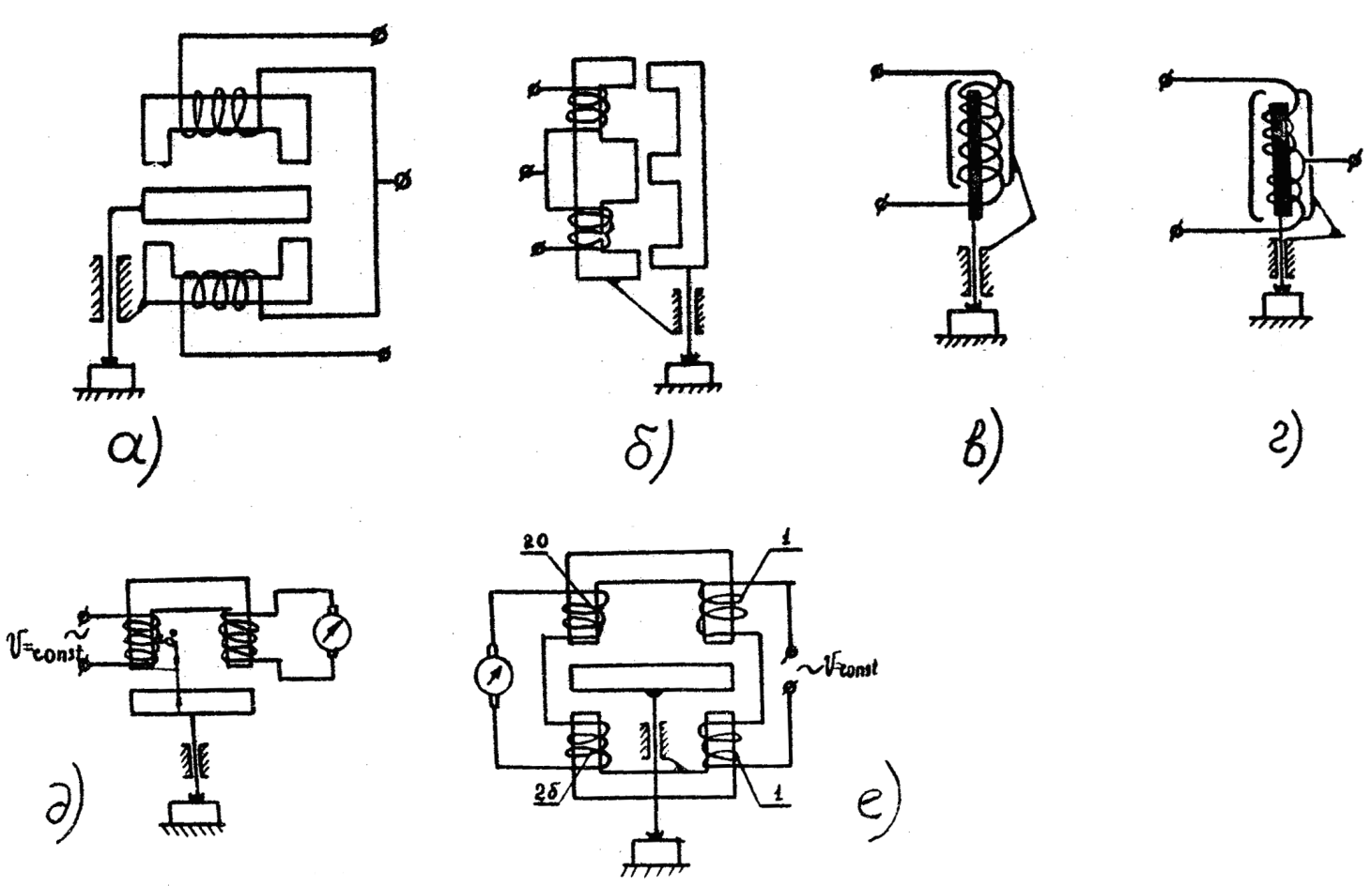
Рисунок 5.17 – Схемы индуктивных преобразователей
Индуктивные преобразователи с переменной площадью воздушного зазора имеют линейную характеристику (рисунок 5.16, б), но не высокую чувствительность, используются для измерения больших перемещений. Дифференциальная схема данного типа преобразователя (рисунок 5.17, б) обладает аналогичными преимуществами.
Для измерения перемещений нескольких десятков миллиметров применяются преобразователи с разомкнутой магнитной цепью, так называемые преобразователи соленоидного типа. На рисунке 5.17 в, г приведены схемы недифференциального и дифференциального преобразователя соленоидного типа. Для целей повышения чувствительности катушка заключается в ферромагнитный корпус.
Индуктивный преобразователь модели БВ-6067 представляет собой преобразователь соленоидного типа с разомкнутой магнитной цепью. На рисунке 5.18 представлена конструкция такого преобразователя. Его работа основана на принципе изменения площади сечения магнитопровода при смещении измерительного стержня. За счет этого изменяется индуктивное сопротивление катушек преобразователя и их выходное напряжение.
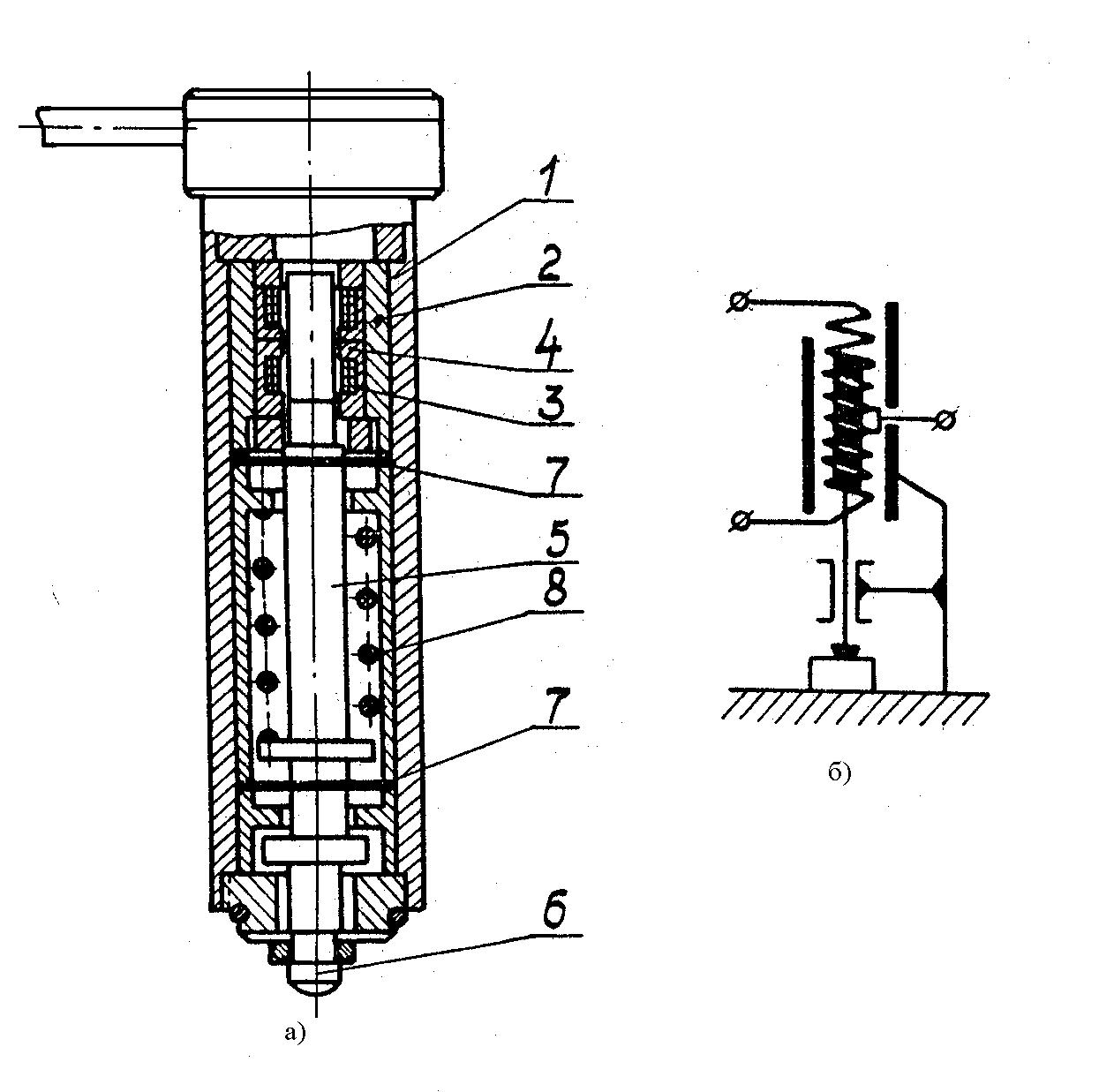
Рисунок 5.18 – Индуктивный преобразователь соленоидного типа
Сигналы преобразователя, амплитуда которых пропорциональна контролируемому размеру, преобразуются электронным блоком в сигнал, по величине изменения которого определяют изменение размера контролируемой детали.
Конструктивно преобразователь выполнен в виде цилиндрического корпуса 1, внутри которого 1 под защитным кожухом 2, изготовленным из латуни, расположены две катушки 3. Магнитопровод 4 изготавливается из стали марки Э12. Измерительный стержень 5, несущий измерительный наконечник 6, установлен на двух дисковых плоских пружинах 7, имеющих концентрические круговые прорезы, что обеспечивает плавное перемещение измерительного стержня без трения и люфтов. Измерительный стержень 5 – сборный, его верхняя часть, являющаяся сердечником (якорем), изготавливается из феррита, а остальная часть- из латуни. Измерительное усилие создается пружиной 8. Провода из преобразователя выводятся экранированным кабелем.
В существующих приборах индуктивные преобразователи позволяют получить цену деления 0,05 – 1 мкм и пределы измерения от 0,003 мм до 1,5 мм.
В таблице 5.6 дана техническая характеристика индуктивного преобразователя соленоидного типа.
Таблица 5.6 – Технические характеристики индуктивного преобразователя
Физические основы индуктивных преобразователей. Область их применения.
Индуктивность – это физическая величина, характеризующая магнитные свойства электрической цепи.Ток, текущий в проводящем контуре создает в окружающем пространстве магнитное поле, причем магнитный поток Ф, пронизывающий контур, прямо пропорционален силе тока I: Коэффициент L называется индуктивностью контура, ограничивающего поверхность, через который проходит поток Ф, или коэффициентом самоиндукции этого контура. Величина L зависит от размеров и геометрической формы контура, от магнитной проницаемости проводников, образующих цепь, и от свойств окружающей среды. Для создания большой индуктивности проводник свертывают в спираль, называемую катушкой индуктивности, и внутри устанавливают сердечник – магнитопровод из ферромагнитных материалов. Магнитный поток через такой контур определится как где B – магнитная индукция внутри контура; S – площадь поперечного сечения магнитной цепи; N – число витков. тогда то есть где l – длина катушки; μ – магнитная проницаемость.
Из приведенного уравнения следует, что изменения индуктивности можно достичь изменением длины l, поперечного сечения S, или магнитной проницаемости μ.При прохождении переменного тока в цепи возникает ЭДС самоиндукции, величина которой зависит от значения индуктивности цепи. Направление этой ЭДС таково, что её действие препятствует изменению величины тока, то есть уменьшает амплитуду тока, а следовательно, и его эффективное значение. Пока индуктивность проводов мала, эта добавочная ЭДС тоже мала, и действие её практически незаметно. ЭДС самоинд-ии зависит от индуктивности контура. Чем больше индуктивность, тем значительнее ЭДС самоиндук и ее влияние на значение тока, значит изменение индуктивности доступно регистрации. Но при наличии большой индуктивности эта добавочная ЭДС может очень значительно влиять на величину переменного тока. Соответственно, легко будет зарегистрировать изменение индуктивности такого контура.
Индуктивным датчиком называют устройство для преобразования механических перемещений в электрический сигнал, представляющее собой катушку индуктивности с магнитопроводом и подвижным элементом (якорем), который при изменении линейного или углового размера перемещается и изменяет индуктивность катушки за счет изменения параметров магнитной цепи. Изменение индуктивности происходит в результате изменения зазора между якорем и сердечником (рис. а, в), либо и результате изменения площади их взаимного перекрытия (рис. б, г).

Изменение индуктивности зависит от перемещения якоря и, соответственно, от параметров зазора, нелинейно:
Здесь индекс 0 относится к параметрам воздушных зазоров участков магнитной цепи, индекс k относится к ферромагнитным участкам магнитной цепи, соответственно n – число воздушных участков, m – число ферромагнитных участков.
Для линеаризации характеристики и увеличения чувствительности применяются дифференциальные индуктивные датчики (рис. в, г).В этом случае при ходе якоря индуктивность одной катушки увеличивается на ΔL, а индуктивность другой уменьшается на ΔL. С помощью мостовой схемы разность изменений индуктивностей может быть преобразована в электрическое напряжение или ток, который вызовет отклонение стрелки на приборе, пропорциональное перемещению измерительного стержня датчика. Еще одним преимуществом дифференциальных схем является то, что многие влияющие факторы одновременно воздействуют на обе катушки и поэтому практически не оказывают влияния на значение измеряемого размера.Следует отметить, что с помощью индуктивных датчиков, как первичных преобразователей измеряются не только геометрические параметры, но и любые другие физические величины, которые могут вызвать малые линейные или угловые перемещения: например, силы, давления, и т.п.Наведение ЭДС индукции в одном проводнике под действием магнитного поля другого проводника, в котором течет переменный ток, называется явлением взаимной индукции: где Ф12 – магнитный поток поля тока I2 через поверхность, ограниченную контуром I1; L12 – коэффициент взаимной индукции (взаимоиндуктивность).Рассмотрим индуктивный преобразователь угла поворота.

Обмотка 2 поворачивается в кольцевом зазоре магнитной цепи. При крайних положениях рамки ЭДС индукции максимальна, в горизонтальном положении равна нулю. Например, в конструкции датчика поворота сельсина БС-155А обмотка возбуждения ω1 укрепляется в торцевой части статора, в пазах ротора проложены фазные обмотки ω2. Каждому угловому положению ротора соответствует определенное соотношение величин и фаз ЭДС.Если вращение на ротор передается с ходового винта станка с ЧПУ, то снимаемый с обмоток ротора измерительный сигнал является функцией угла поворота, а, следовательно, заданного перемещения. Для регистрации линейных перемещений исполнительных органов станков с ЧПУ применяется линейный индуктосин.
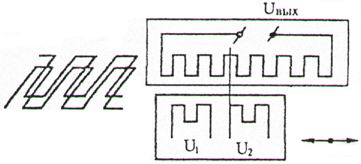
Он состоит из линейки и ползуна с печатными обмотками. С обмотки линейки снимается индуцируемое напряжение Uвых. Ползун имеет две печатные обмотки, сдвинутые на 1/4 шага (сдвиг фазы на 90°). На каждую из обмоток подается переменный ток, причем па 1-й обмотке: U1 = U0·sin αзад, а на 2-й: U2 = U0·cos αзад , где αзад – заданный угол смещения фаз ЭДС, отражающий заданную величину перемещения рабочего органа. При перемещении ползуна: Uвых = U0·sin αзад·cos αф – U0·cos αзад·sin αф, где αф – фактический угол смещения, отражающий фактическое перемещение рабочего органа. После преобразований получаем: Uвых = U0·sin(αзад – αф).
При αзад = αф Uвых = 0 и подается команда на остановку рабочего органа
Индуктивные преобразователи: определение, принцип работы и применение
В данной статье мы рассмотрим основные принципы работы и применение индуктивных преобразователей, а также их преимущества и недостатки.
Индуктивные преобразователи: определение, принцип работы и применение обновлено: 24 ноября, 2023 автором: Научные Статьи.Ру
Помощь в написании работы
Введение
В электротехнике существует множество различных устройств и преобразователей, которые позволяют преобразовывать одну форму энергии в другую. Одним из таких преобразователей являются индуктивные преобразователи. В данной статье мы рассмотрим определение и принцип работы индуктивных преобразователей, а также их применение и преимущества. Также будут рассмотрены различные типы индуктивных преобразователей, такие как угловые и линейные преобразователи. Погрузимся в мир индуктивных преобразователей и узнаем, как они помогают нам в решении различных задач в электротехнике.
Нужна помощь в написании работы?
Написание учебной работы за 1 день от 100 рублей. Посмотрите отзывы наших клиентов и узнайте стоимость вашей работы.
Определение индуктивных преобразователей
Индуктивные преобразователи, также известные как индуктивные датчики, являются устройствами, которые используют принцип электромагнитной индукции для преобразования физической величины, такой как угловое или линейное перемещение, в электрический сигнал. Они широко применяются в различных областях, включая автоматизацию производства, автомобильную промышленность, медицинскую технику и другие.
Основным элементом индуктивного преобразователя является индуктивный датчик, который состоит из катушки, обмотанной проводом, и магнитного ядра. Когда физическая величина, например, угол поворота или перемещение, изменяется, это приводит к изменению магнитного поля вокруг катушки. Изменение магнитного поля вызывает изменение индуктивности катушки, что в свою очередь приводит к изменению электрического сигнала, который может быть измерен и интерпретирован для получения информации о физической величине.
Индуктивные преобразователи обладают высокой точностью, надежностью и долговечностью. Они могут работать в широком диапазоне температур и условий окружающей среды. Кроме того, они не требуют контактного взаимодействия с измеряемым объектом, что делает их удобными для использования в различных приложениях.
Принцип работы индуктивных преобразователей
Индуктивные преобразователи основаны на принципе изменения индуктивности катушки при изменении физической величины, которую они измеряют. Они состоят из катушки, которая обычно изготавливается из провода, намотанного на ферромагнитный материал.
Когда физическая величина, такая как угловое или линейное перемещение, изменяется, это приводит к изменению индуктивности катушки. Изменение индуктивности вызывает изменение электрического сопротивления катушки, что в свою очередь приводит к изменению электрического сигнала, который может быть измерен и интерпретирован для получения информации о физической величине.
Например, в случае индуктивного преобразователя угловых перемещений, катушка может быть расположена на вращающемся элементе, таком как вал. При вращении вала, индуктивность катушки будет меняться в зависимости от угла поворота. Это изменение индуктивности может быть измерено и преобразовано в электрический сигнал, который представляет угловое перемещение.
Аналогично, в случае индуктивного преобразователя линейных перемещений, катушка может быть расположена на подвижном элементе, таком как шток. При движении штока, индуктивность катушки будет меняться в зависимости от его положения. Это изменение индуктивности может быть измерено и преобразовано в электрический сигнал, который представляет линейное перемещение.
Таким образом, принцип работы индуктивных преобразователей заключается в использовании изменения индуктивности катушки для измерения физической величины. Это позволяет получить точные и надежные данные о перемещении или угле поворота объекта, на котором установлен преобразователь.
Индуктивные преобразователи угловых перемещений
Индуктивные преобразователи угловых перемещений – это устройства, которые используются для измерения углового положения объекта. Они основаны на принципе изменения индуктивности катушки при вращении объекта.
Основными компонентами индуктивного преобразователя угловых перемещений являются катушка и вращающийся элемент. Катушка обычно представляет собой намотку провода на ферромагнитном сердечнике. Вращающийся элемент может быть магнитом или ферромагнитным диском.
При вращении объекта, катушка и вращающийся элемент также вращаются. Это приводит к изменению индуктивности катушки, так как магнитное поле, создаваемое вращающимся элементом, влияет на индуктивность катушки. Изменение индуктивности может быть измерено и преобразовано в электрический сигнал, который представляет угловое перемещение объекта.
Индуктивные преобразователи угловых перемещений обладают рядом преимуществ. Они обеспечивают высокую точность измерений, имеют широкий диапазон рабочих температур и обладают высокой степенью защиты от внешних воздействий, таких как пыль, влага и вибрации. Кроме того, они обладают долгим сроком службы и низкими энергопотреблением.
Однако, у индуктивных преобразователей угловых перемещений есть и некоторые недостатки. Они могут быть дорогими в производстве и требуют сложной калибровки. Кроме того, они могут быть чувствительны к внешним магнитным полям, что может привести к искажению измерений.
Индуктивные преобразователи угловых перемещений широко применяются в различных областях, включая промышленность, автомобильную промышленность, робототехнику и медицинскую технику. Они используются для измерения углового положения вала, поворота руля, угла наклона и других параметров, которые требуют точного измерения угла поворота.
Индуктивные преобразователи линейных перемещений
Индуктивные преобразователи линейных перемещений – это устройства, которые используются для измерения линейного перемещения объекта. Они работают на основе принципа изменения индуктивности в зависимости от положения объекта.
Основными компонентами индуктивного преобразователя линейных перемещений являются индуктивная катушка и подвижный элемент. Индуктивная катушка обычно представляет собой намотку провода на ферромагнитном сердечнике. Подвижный элемент может быть выполнен в виде магнита или ферромагнитного стержня.
Когда подвижный элемент движется вдоль оси индуктивной катушки, меняется магнитное поле, проходящее через катушку. Это приводит к изменению индуктивности катушки. Изменение индуктивности можно измерить и использовать для определения положения подвижного элемента.
Индуктивные преобразователи линейных перемещений обладают высокой точностью и разрешением, что делает их полезными во многих приложениях. Они широко применяются в промышленности, например, для измерения перемещения в станках с числовым программным управлением (ЧПУ), робототехнике, автомобильной промышленности и других областях, где требуется точное измерение линейного перемещения.
Однако индуктивные преобразователи линейных перемещений также имеют некоторые ограничения. Они могут быть чувствительны к вибрациям и ударным нагрузкам, поэтому требуют хорошей фиксации и защиты от внешних воздействий. Кроме того, они могут быть дорогими в производстве и требуют сложной калибровки для достижения высокой точности измерений.
Применение индуктивных преобразователей
Индуктивные преобразователи широко применяются в различных областях, где требуется измерение линейных перемещений. Вот некоторые из основных областей применения:
Промышленность
Индуктивные преобразователи используются в промышленности для контроля и измерения линейных перемещений в различных процессах производства. Они могут быть использованы для измерения перемещения в станках с числовым программным управлением (ЧПУ), робототехнике, автомобильной промышленности и других областях, где требуется точное измерение линейного перемещения.
Медицина
В медицинской технике индуктивные преобразователи могут использоваться для измерения перемещения в медицинских инструментах, таких как эндоскопы и хирургические инструменты. Они также могут быть использованы для контроля движения в медицинских аппаратах, таких как рентгеновские аппараты и магнитно-резонансные томографы.
Авиация и космическая промышленность
В авиации и космической промышленности индуктивные преобразователи могут использоваться для измерения перемещения в различных системах и компонентах, таких как управляющие поверхности, шасси, двери и люки. Они обеспечивают точное измерение перемещения и контроль движения в критически важных системах.
Автомобильная промышленность
В автомобильной промышленности индуктивные преобразователи могут использоваться для измерения перемещения в различных системах и компонентах, таких как подвеска, рулевая колонка, педали и двери. Они обеспечивают точное измерение перемещения и контроль движения в автомобильных системах.
В целом, индуктивные преобразователи являются важным инструментом для измерения линейных перемещений в различных областях. Они обеспечивают высокую точность и надежность измерений, что делает их незаменимыми во многих приложениях.
Преимущества индуктивных преобразователей:
1. Высокая точность измерений: Индуктивные преобразователи обеспечивают высокую точность измерений линейных и угловых перемещений. Это позволяет получать точные данные о положении объекта или его движении.
2. Широкий диапазон измерений: Индуктивные преобразователи могут работать в широком диапазоне измерений, что позволяет использовать их в различных приложениях и с разными типами объектов.
3. Высокая надежность: Индуктивные преобразователи обладают высокой надежностью и долговечностью. Они могут работать в различных условиях, включая высокие температуры, вибрации и влажность.
4. Быстрый отклик: Индуктивные преобразователи имеют быстрый отклик на изменения перемещения объекта. Это позволяет получать актуальные данные в режиме реального времени.
Недостатки индуктивных преобразователей:
1. Чувствительность к внешним воздействиям: Индуктивные преобразователи могут быть чувствительны к внешним электромагнитным полям, что может привести к искажению измерений. Для минимизации этого эффекта требуется правильная экранировка и защита.
2. Ограниченный диапазон измерений: В зависимости от конкретной модели и типа индуктивного преобразователя, его диапазон измерений может быть ограничен. Это может ограничить его применение в некоторых приложениях с большими перемещениями.
3. Высокая стоимость: Индуктивные преобразователи могут быть более дорогими по сравнению с некоторыми другими типами преобразователей. Это может быть проблемой при использовании их в больших количествах или в бюджетных проектах.
4. Требуется калибровка: Индуктивные преобразователи могут требовать периодической калибровки для поддержания высокой точности измерений. Это может быть дополнительной затратой времени и ресурсов.
Таблица с информацией о индуктивных преобразователях
| Тип преобразователя | Описание | Принцип работы | Применение | Преимущества | Недостатки |
|---|---|---|---|---|---|
| Индуктивные преобразователи угловых перемещений | Преобразуют угловое перемещение в электрический сигнал | Используют изменение индуктивности для измерения угла | Используются в робототехнике, автоматизации производства и других областях | Высокая точность измерений, долговечность, низкое энергопотребление | Высокая стоимость, чувствительность к внешним магнитным полям |
| Индуктивные преобразователи линейных перемещений | Преобразуют линейное перемещение в электрический сигнал | Используют изменение индуктивности для измерения расстояния | Применяются в автомобильной промышленности, медицинском оборудовании и других областях | Высокая точность измерений, компактный размер, низкое энергопотребление | Ограниченный диапазон измерений, высокая стоимость |
Заключение
Индуктивные преобразователи являются важным элементом в электротехнике. Они позволяют преобразовывать угловые и линейные перемещения в электрические сигналы, что находит широкое применение в различных областях, таких как автоматизация производства, робототехника и медицинская техника. Они обладают рядом преимуществ, таких как высокая точность и надежность, однако имеют и некоторые недостатки, такие как высокая стоимость и сложность в эксплуатации. В целом, индуктивные преобразователи играют важную роль в современной электротехнике и продолжают развиваться для улучшения своих характеристик и расширения области применения.
Индуктивные преобразователи: определение, принцип работы и применение обновлено: 24 ноября, 2023 автором: Научные Статьи.Ру
Примеры применения индуктивных преобразователей
Ниже представлены некоторые примеры измерений, выполняемых с помощью одного, двух или нескольких индуктивных преобразователей.
Индуктивные преобразователи имеют пределы измерения от ±20 до ±5000 мкм и погрешность измерения от ±0,05 до ±10 мкм в зависимости от модели и диапазона измерения.
Измерение толщины детали. Используются два встречно установленных индуктивных преобразователя, толщина определяется как сумма показаний верхнего и нижнего датчиков «А+Б»