Назначение гироскопических датчиков и системы их использования в современных навигационных системах
Эффективность и конкурентоспособность современных летательных аппаратов (ЛА) во многом определяется совершенством гироскопических датчиков первичной информации, на базе которых строятся навигационные системы и системы управления ЛА.
В настоящее время существует большое многообразие различных типов гироскопических датчиков, правильное применение которых обеспечивает необходимые эксплуатационные качества ЛА.
Каждому типу гироскопических датчиков можно найти оптимальную нишу применения. При выборе гироскопического датчика учитываются следующие его основные характеристики: точность, надежность работы, энергопотребление, габаритные размеры и стоимость. В зависимости от требований, предъявляемых к системам управления и навигационным системам, выбирается соответствующий тип гироскопического датчика.
Тем не менее, из всего многообразия датчиков можно выделить наиболее перспективные по указанным выше характеристикам. Это лазерные гироскопы (ЛГ), волоконно-оптические (ВОГ), волновые твердотельные (ВТГ) и микромеханические гироскопы (ММГ).
Основным их преимуществом является повышенная надежность работы из-за отсутствия быстро вращающихся роторов и карданных подвесов, минимальное потребление электроэнергии за счет реализации основных функциональных узлов на базе сервисной микроэлектроники и возможность повышения точностных характеристик путем математической обработки первичных сигналов датчиков в микропроцессорах.
Гироскопические датчики являются источниками первичной информации при построении пилотажных и навигационных систем летательных аппаратов.
В пилотажных системах они используются в основном в качестве датчиков угловых скоростей в цепях обратной связи автоматических систем управления. В навигационных системах — в качестве датчиков углового положения самолета или индикатора нулевого положения гиростабилизированной платформы. В качестве датчиков линейных ускорений используются акселерометры.
Рассмотрим некоторые схемы построения инерциальных навигационных систем на базе гироскопических датчиков. Основными задачами любой навигационной системы является определение местоположения летательного аппарата в географических координатах – долготы (λ) и широты (φ) местонахождения, скорости (υ) и высоты (h) полета, углового положения относительно своего центра тяжести в инерциальном пространстве – курса (ψ), тангажа (ϑ), крена (γ). На рис.1.1 и рис.1.2 показаны эти параметры, принятые в авиации. 
Рис. 1.1 Углы ориентации самолета 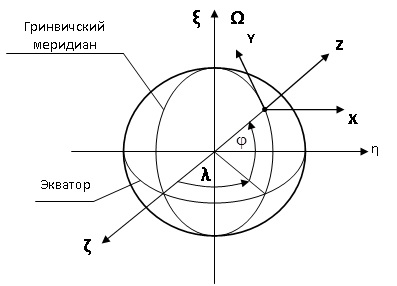
Рис.1.2 Системы координат, в которых определяется положение летательного аппарата
На рисунках 1.1, 1.2:  – географическая система координат, где ось ξ – совпадает с осью вращения Земли и направлена на Север; ось ς – лежит в плоскости экватора и проходит через Гринвичский меридиан; ось η – также лежит в плоскости экватора и направлена на Восток.
– географическая система координат, где ось ξ – совпадает с осью вращения Земли и направлена на Север; ось ς – лежит в плоскости экватора и проходит через Гринвичский меридиан; ось η – также лежит в плоскости экватора и направлена на Восток.  – базовый сопровождающий трехгранник, относительно которого определяется угловое положение летательного аппарата, где ось X – направлена на Восток; ось Y – направлена на Север по меридиану; ось Z – по вертикали местности.
– базовый сопровождающий трехгранник, относительно которого определяется угловое положение летательного аппарата, где ось X – направлена на Восток; ось Y – направлена на Север по меридиану; ось Z – по вертикали местности.  – оси измерительного трехгранника инерциальной навигационной системы.
– оси измерительного трехгранника инерциальной навигационной системы.
Инерциальные навигационные системы подразделяются на две большие группы – платформенные и бесплатформенные.
Независимо от типа навигационной системы информация о скорости полета летательного аппарата и пройденном пути находится из показаний акселерометров путем интегрирования их выходных сигналов – линейных ускорений  . Однако достоверность этой информации зависит от точности определения положения осей чувствительности акселерометров относительно заданных в инерциальном пространстве базовых измерительных осей – осей инерциального сопровождающего трехгранника.
. Однако достоверность этой информации зависит от точности определения положения осей чувствительности акселерометров относительно заданных в инерциальном пространстве базовых измерительных осей – осей инерциального сопровождающего трехгранника.
В платформенных навигационных системах заданное положение осей базового сопровождающего трехгранника достигается стабилизацией положения в инерциальном пространстве платформы, на которой установлены акселерометры. Необходимая стабильность положения обеспечивается системами автоматического регулирования трех рам карданова подвеса, в которых в качестве датчиков системы регулирования используются, как правило, механические двух или трехстепенные гироскопы с быстро вращающимся ротором, а в качестве исполнительного органа – датчики моментов (DM) соответствующих рам карданова подвеса. 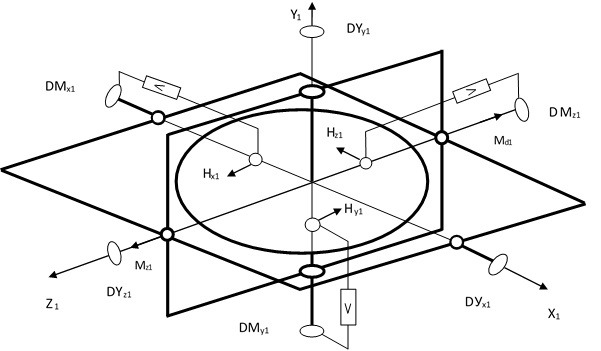
Рис.1.3 Схема построения платформенной навигационной системы
Гироскопы устанавливаются на той же платформе, что и акселерометры (рис.1.3). Чем выше точность гироскопов, тем с меньшей погрешностью осуществляется стабилизация положения платформы, тем точнее определяются скорость и местоположение летательного аппарата.
Информация об угловом положении центра тяжести летательного аппарата снимается с трех датчиков угла  , установленных по осям рам карданова подвеса.
, установленных по осям рам карданова подвеса.
В качестве примера рассмотрим стабилизацию положения платформы по одной из измерительных осей навигационной системы – по оси  (рис.1.3). При повороте платформы под действием возмущающего момента
(рис.1.3). При повороте платформы под действием возмущающего момента  вокруг оси ось гироскопа
вокруг оси ось гироскопа  начнет прецессировать (поворачиваться) вокруг оси
начнет прецессировать (поворачиваться) вокруг оси  на угол ε. В датчике угла гироскопа появится напряжение рассогласования Uε, которое после усиления подается на моментный двигатель
на угол ε. В датчике угла гироскопа появится напряжение рассогласования Uε, которое после усиления подается на моментный двигатель  тангажной рамы. Последний создаст момент
тангажной рамы. Последний создаст момент  , под действием которого рама будет возвращаться в исходное положение. При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла
, под действием которого рама будет возвращаться в исходное положение. При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла  , установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.
, установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.
Из представленной схемы видны основные недостатки платформенных инерциальных систем – большое количество механических вращающихся элементов, наличие аналоговых систем регулирования и, как следствие, невысокая надежность работы системы.
Появление и развитие гироскопических датчиков на новых физических принципах — ЛГ, ВОГ, ВТГ, ММГ, в которых отсутствуют быстро вращающиеся механические ротора, позволило перейти к созданию инерциальных навигационных систем повышенной надежности – бесплатформенных инерциальных навигационных систем (БИНС).
В БИНСах нет карданова подвеса, а роль стабилизированной платформы выполняет базовый сопровождающий трехгранник (рис.1.2), относительно которого определяется положение измерительных осей БИНС в процессе полета летательного аппарата.
В качестве гироскопических датчиков в БИНС используются три одноосных гироскопа и три акселерометра, которые жестко устанавливаются в блоке чувствительных элементов БИНС по трем ортогональным измерительным осям (рис.1.4). Блок чувствительных элементов, в свою очередь, жестко связан с корпусом летательного аппарата. 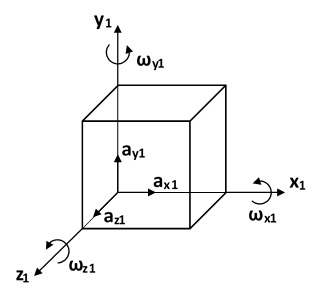
Рис.1.4 Измерительные оси блока чувствительных элементов БИНС
Гироскопы служат для определения углового положения измерительных осей блока чувствительных элементов относительно базового сопровождающего трехгранника, то есть углов крена, тангажа и курса летательного аппарата. Поскольку используемые в БИНС гироскопы работают, как правило, в режиме датчиков угловых скоростей, то для определения указанных углов их показания интегрируются  . Показания акселерометров, как и в платформенных системах, служат для определения скорости движения летательного аппарата и пройденного им пути. С этой целью показания акселерометров также интегрируются
. Показания акселерометров, как и в платформенных системах, служат для определения скорости движения летательного аппарата и пройденного им пути. С этой целью показания акселерометров также интегрируются  .
. 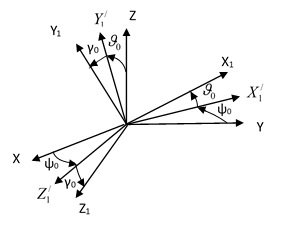
Рис.1.5 Начальные углы выставки БИНС
Перед началом полета осуществляется выставка БИНС, то есть определение начального углового положение  измерительных осей () относительно осей базового сопровождающего трехгранника () (рис.1.5). Величина этих углов заносится в бортовой компьютер и учитывается при определении углового положения самолета в процессе его полета.
измерительных осей () относительно осей базового сопровождающего трехгранника () (рис.1.5). Величина этих углов заносится в бортовой компьютер и учитывается при определении углового положения самолета в процессе его полета.
Полное отсутствие механических вращающихся частей делает БИНС чрезвычайно надежной системой в эксплуатации, а использование высокоскоростной бортовой вычислительной машины позволяет повысить точность такой системы за счет алгоритмической компенсации погрешностей гироскопических датчиков, обусловленных колебаниями температуры окружающей среды и механическими воздействиями.
Но не зависимо от типа навигационной системы ее технические возможности определяются в первую очередь техническими характеристиками гироскопических датчиков.
В данном посте рассмотрена малая часть материала, представленная в книге к.т.н. Галкина В.И. «Перспективные гироскопы летательных аппаратов» ISNB 978-3-659-47948-9
В дальнейшем буду предоставлять еще немного информации из этой книги. Но тем кто заинтересовался и кому была полезна статья прошу выразить интерес в покупке книги.
Как устроен гироскоп: суть, принцип работы, где применяется
Однажды я наблюдал разговор двух друзей, точнее подруг:
А: О, знаешь, у меня новый смартфон, в нем есть даже встроенный гироскоп
Б: Аа, да, я тоже скачала себе, поставила гироскоп на месяц
А: Эмм, ты точно уверена, что это гироскоп?
Б: Да, гироскоп для всех знаков зодиака.
Чтобы таких диалогов в мире стало чуть меньше, предлагаем узнать, что такое гироскоп и как он работает.
Гироскоп: история, определение
Гироскоп – прибор, имеющий свободную ось вращения и способный реагировать на изменение углов ориентации тела, на котором он установлен. При вращении гироскоп сохраняет свое положение неизменным.
Само слово происходит от греческих gyreuо – вращаться и skopeo – смотреть, наблюдать. Впервые термин гироскоп был введен Жаном Фуко в 1852 году, но изобрели прибор раньше. Это сделал немецкий астроном Иоганн Боненбергер в 1817 году.
Гироскопы представляют собой вращающиеся с высокой частотой твердые тела. Ось вращения гироскопа может изменять свое направление в пространстве. Свойствами гироскопа обладают вращающиеся артиллерийские снаряды, винты самолетов, роторы турбин.
Простейший пример гироскопа – волчок или хорошо всем известная детская игрушка юла. Тело, вращающееся вокруг определенной оси, которая сохраняет положение в пространстве, если на гироскоп не действуют какие-то внешние силы и моменты этих сил. При этом гироскоп обладает устойчивостью и способен противостоять воздействию внешней силы, что во многом определяется его скоростью вращения.
Например, если мы быстро раскрутим юлу, а потом толкнем ее, она не упадет, а продолжит вращение. А когда скорость волчка упадет до определенного значения, начнется прецессия – явление, когда ось вращения описывает конус, а момент импульса волчка меняет направление в пространстве.

Виды гироскопов
Существует множество видов гироскопов: двух и трехстепенные (разделение по степеням свободы или возможным осям вращения), механические, лазерные и оптические гироскопы (разделение по принципу действия).
Рассмотрим самый распространенный пример — механический роторный гироскоп. По сути это волчок, вращающийся вокруг вертикальной оси, которая поворачивается вокруг горизонтальной оси и в свою очередь закреплена в еще одной раме, поворачивающейся уже вокруг третьей оси. Как бы мы не поворачивали волчок, он всегда будет находится именно в вертикальном положении.
Применение гироскопов
Благодаря своим свойствам гироскопы находят очень широкое применение. Они используются в системах стабилизации космических аппаратов, в системах навигации кораблей и самолетов, в мобильных устройствах и игровых приставках, а также в качестве тренажеров.
Интересует, как такой прибор может поместиться в современный мобильный телефон и зачем он там нужен? Дело в том, что гироскоп помогает определить положение устройства в пространстве и узнать угол отклонения. Конечно, в телефоне нет непосредственно вращающегося волчка, гироскоп представляет собой микроэлектромеханическую систему (МЭМС), содержащую микроэлектронные и микромеханические компоненты.
Как это работает на практике? Представим, что вы играете в любимую игру. Например, гонки. Чтобы повернуть руль виртуального автомобиля не нужно нажимать никаких кнопок, достаточно лишь изменить положение своего гаджета в руках.
Как видим, гироскопы – удивительные приборы, обладающие полезными свойствами. Если вам понадобится решить задачу на расчет движения гироскопа в поле внешних сил, обращайтесь к специалистам студенческого сервиса, которые помогут вам справится с ней быстро и качественно!
Как это работает. Гироскоп
Механизм, изобретенный в начале XIX века, сегодня находит применение практически повсеместно. Гироскопы используются в системах навигации кораблей и самолетов, в мобильных устройствах, игровых приставках и квадрокоптерах. Рассказываем об удивительном гироскопе – его истории, устройстве и принципе действия.
От детского волчка до полетов в космос
В основе многих научных открытий лежит наблюдение за простыми повседневными вещами. Так и один из важных приборов, применяющихся в составе современных устройств, – гироскоп – родился из старинной детской игрушки, известной как волчок. Сильно раскрученный волчок, удерживающий вертикальное положение даже при воздействии на него внешних сил, привлек внимание ученых. Изучая его свойства, люди науки задумывались о практическом применении эффекта. Волчком интересовались англичанин Исаак Ньютон, российский академик Леонард Эйлер, опубликовавший в 1765 году труд «Теория движения твердых тел», и другие ученые.
Первые механические гироскопы появились в начале XIX века. Но только в 1852 году французский физик Леон Фуко предложил использовать устройство для контроля изменения направления и дал ему название «гироскоп». Первый промышленный гироскоп был создан в конце XIX века − австрийский инженер Людвиг Обри придумал использовать его для стабилизации курса торпеды.
Следующим шагом в истории гироскопии стало создание лазерного гироскопа. Подготовка к его «рождению» заняла практически весь XX век, ведь для этого нужно было подтянуть квантовую физику и создать новые методы обработки материалов. Разработка лазерных гироскопов началась в 1970-х годах, а массовое применение пришлось на 2000-е. Сегодня мы находимся на этапе развития нового поколения гироскопов – волновых твердотельных и микромеханических.
В наше время гироскопы применяются в самых разных областях: для стабилизации фото- и видеокамер, в мобильных устройствах и игровых контроллерах, в огнестрельном оружии и робототехнике, в гироскутерах и квадрокоптерах, в системах навигации и управления в авиации, на кораблях и в космосе. Современные гироскопы на МЭМС-технологиях могут достигать миллиметровых размеров.
Устройство механического гироскопа
Как мы уже выяснили, гироскопы различаются в зависимости от принципа действия. Волчок, или юла – это простейший вариант механического гироскопа. Если массивный волчок раскрутить до достаточно высокой скорости, он сможет долго простоять в вертикальном положении, пока не затормозится, а также практически не отклоняться по вертикальной оси при применении к нему силы. Волчок не падает благодаря тому, что вращающееся тело стремится сохранить величину своей угловой скорости и направление оси вращения. Свободно вращающийся волчок под воздействием внешней силы отклоняется не в направлении этой силы, а перпендикулярно ей. Это явление называется прецессией.
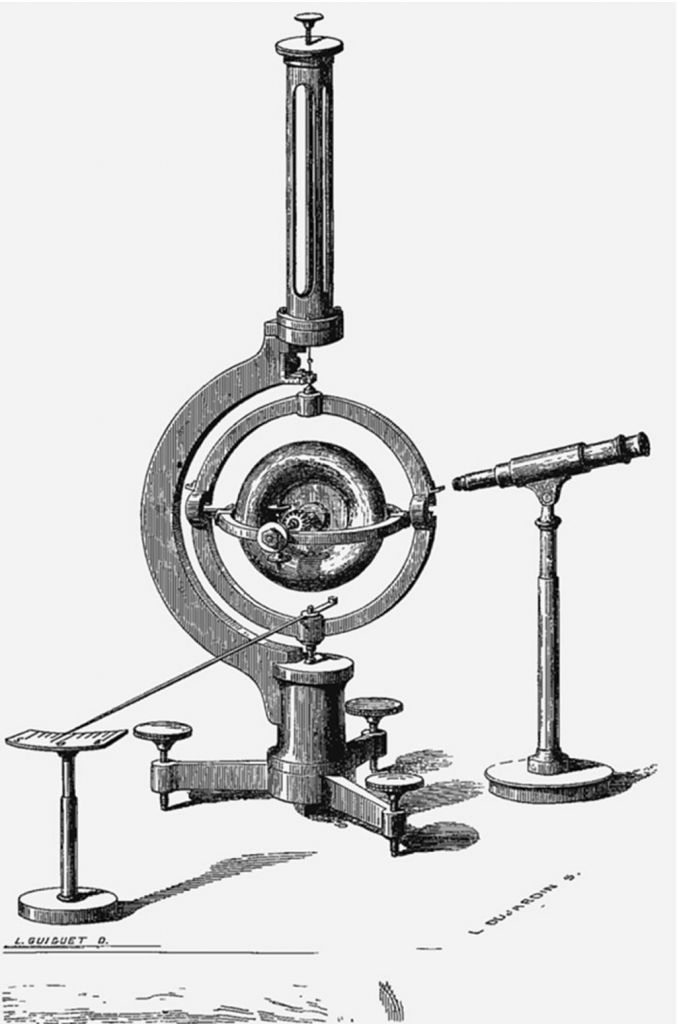
Рассмотрим устройство на примере чуть более сложного роторного гироскопа с тремя степенями свободы. Подобный гироскоп, способный выполнять роль гирокомпаса, демонстрировал Леон Фуко. Три степени свободы гироскопа обеспечиваются с помощью карданового подвеса. Он состоит из двух колец: большого кольца, которое может вращаться вокруг вертикальной оси, и малого кольца, вращающегося вокруг горизонтальной оси. Внутри малого кольца закрепляется вращающееся тело – ротор. В результате благодаря кардановой системе подвеса ось ротора может иметь любое направление.
Механический гироскоп в движении
Для начала работы ротор раскручивается: чем быстрее раскручено колесо ротора, тем выше его сопротивление изменениям направления оси вращения. Как бы мы ни вращали все устройство, движущийся внутри него ротор сохраняет направление оси вращения в пространстве.
На этих свойствах вращающегося гироскопа основана работа гирокомпаса. Например, в авиации гирокомпас позволяет определять положение самолета в отсутствие ориентиров. Если самолет кренится в продольной или поперечной плоскости, с помощью гирокомпаса пилот увидит это отклонение по приборам. Кроме того, гирокомпас необходим в работе автопилота.
При очевидной полезности у механического гироскопа есть ряд недостатков. Для его стабильной работы нужны уникальные подшипники и предельная балансировка. Кроме того, на точность показаний влияет неизбежное трение в осях устройства.
Лазерный гироскоп − до сих пор на высоте
Избавиться от перечисленных слабых мест механики удалось в гироскопах следующего поколения − лазерных. В основе работы лазерного гироскопа – эффект Саньяка, открытый еще в 1913 году. Его суть заключается в том, что время прохождения светового луча по замкнутому контуру зависит от того, покоится или вращается данный контур, а также от направления его вращения. Применить этот эффект в гироскопии удалось только с появлением лазеров.
Первые работы по созданию лазерного гироскопа были начаты практически одновременно в США и СССР. В 1962 году американские ученые В. Мацек и Д. Девис создали и запустили первый макетный образец лазерного гироскопа на базе кольцевого газового He-Ne-лазера. В середине 1963 года аналогичный результат был достигнут советскими учеными Л.Н. Курбатовым (НИИПФ) и В.Н. Курятовым (НИИ «Полюс» им. М.Ф. Стельмаха, сегодня входит в холдинг «Швабе» Ростеха).
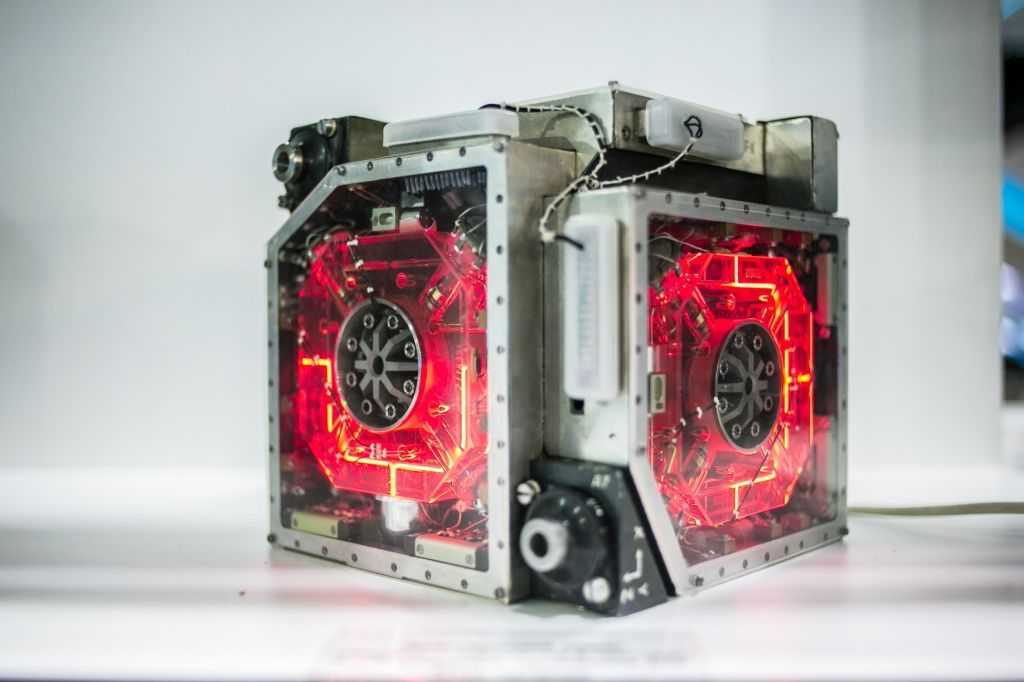
 Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопом
Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопом
Впоследствии наиболее значимые разработки лазерных гироскопов были организованы в НИИ «Полюс» под руководством его основателя М.Ф. Стельмаха, а начиная с 1969 года запущено промышленное производство и поставки серийных образцов.
Сегодня применяются лазерные гироскопы трех основных типов – вибрационный, фарадеевский и зеемановский. У первого частотная подставка основана на механическом реальном вращении гироскопа путем угловых вибраций, у второго и третьего – на искусственном, электрически управляемом расщеплении частот встречных волн в гироскопе. Лазерные гироскопы используются в составе инерциальных навигационных систем, позволяющих определять местоположение самолета без опоры на внешние источники информации.
Помимо НИИ «Полюс» им. М.Ф. Стельмаха на сегодняшний день масштабными производителями лазерных гироскопов являются Раменский приборостроительный завод и Тамбовский завод «Электроприбор», входящие в «Концерн Радиоэлектронные технологии». Их гироскопы применяются в навигационных устройствах, которые устанавливаются на десятки моделей российских самолетов и вертолетов. Несмотря на общую тенденцию к миниатюризации техники и на совершенствование гироскопов на основе микроэлектромеханических систем (МЭМС-технологии), лазерные гироскопы в силу своей высокой точности продолжают доминировать на рынке навигационных устройств.
События, связанные с этим
Как это работает. Высотомер
Ка-62: из военных в гражданские
Все, что вам нужно знать о датчиках гироскоп: принцип работы, типы и применение
Датчики гироскопа – это устройства, которые измеряют угловую скорость и ориентацию объекта, и они широко применяются в робототехнике для стабилизации и навигации.
Все, что вам нужно знать о датчиках гироскоп: принцип работы, типы и применение обновлено: 28 ноября, 2023 автором: Научные Статьи.Ру
Помощь в написании работы
Введение
Добро пожаловать на лекцию по робототехнике! Сегодня мы поговорим о датчиках гироскоп, важном компоненте в мире робототехники. Датчики гироскоп используются для измерения угловой скорости и ориентации объектов в пространстве. Они играют ключевую роль в стабилизации и навигации роботов, а также в других приложениях, где необходимо контролировать движение и ориентацию.
Нужна помощь в написании работы?
Написание учебной работы за 1 день от 100 рублей. Посмотрите отзывы наших клиентов и узнайте стоимость вашей работы.
Что такое датчик гироскоп
Датчик гироскоп – это электронное устройство, которое используется для измерения угловой скорости или изменения ориентации объекта в пространстве. Он основан на принципе сохранения момента импульса и позволяет определить, как быстро и в каком направлении происходит вращение объекта.
Датчики гироскопа могут быть реализованы различными способами, но основной принцип работы заключается в использовании эффекта Кориолиса. Когда объект вращается, его масса создает инерциальные силы, которые воздействуют на датчик гироскопа. Эти силы вызывают отклонение или изменение параметров, которые могут быть измерены и интерпретированы для определения угловой скорости.
Датчики гироскопа широко применяются в различных областях, включая навигацию, авиацию, робототехнику, игровую индустрию и многое другое. Они позволяют устройствам и системам определять свое положение и ориентацию в пространстве, что является важным для точной навигации и управления.
Принцип работы датчика гироскоп
Датчик гироскопа основан на принципе сохранения углового момента. Угловой момент – это физическая величина, которая характеризует вращение тела вокруг оси. Датчик гироскопа измеряет изменение углового момента и использует его для определения угловой скорости.
Основной элемент датчика гироскопа – это гироскопический датчик, который состоит из вращающегося ротора и неподвижного статора. Ротор может вращаться вокруг оси, перпендикулярной оси вращения. Когда датчик гироскопа подвергается угловому ускорению, ротор начинает вращаться вокруг оси, перпендикулярной оси вращения. Это вызывает отклонение ротора от его исходного положения.
Датчик гироскопа измеряет отклонение ротора и преобразует его в электрический сигнал, который можно интерпретировать как угловую скорость. Чем больше угловое ускорение, тем больше отклонение ротора и тем больше угловая скорость.
Существуют различные типы датчиков гироскопа, включая механические, оптические и электронные. Каждый тип имеет свои особенности и применение в различных областях.
Типы датчиков гироскоп
Существует несколько типов датчиков гироскопа, которые используют различные принципы работы для измерения угловой скорости:
Механические гироскопы
Механические гироскопы основаны на принципе сохранения углового момента. Они состоят из вращающегося ротора, который сохраняет свою ось вращения в пространстве. Когда ротор подвергается угловому ускорению, он отклоняется от своего исходного положения, и это отклонение можно измерить. Механические гироскопы обычно используются в навигационных системах и стабилизаторах.
Оптические гироскопы
Оптические гироскопы используют принцип интерференции света для измерения угловой скорости. Они состоят из оптического волокна, через которое проходит световой луч. Когда гироскоп подвергается угловому ускорению, оптическое волокно изгибается, изменяя длину пути светового луча. Это изменение длины пути приводит к изменению интерференционной картины, которую можно измерить и интерпретировать как угловую скорость. Оптические гироскопы обычно используются в авиационной и космической промышленности.
Электронные гироскопы
Электронные гироскопы используют эффект Кориолиса для измерения угловой скорости. Они состоят из микроэлектромеханического (МЭМС) датчика, который вибрирует в определенной плоскости. Когда гироскоп подвергается угловому ускорению, сила Кориолиса вызывает отклонение вибрирующего датчика, и это отклонение можно измерить. Электронные гироскопы обычно используются в смартфонах, игровых контроллерах и других устройствах, требующих измерения угловой скорости.
Каждый тип датчика гироскопа имеет свои преимущества и ограничения, и выбор конкретного типа зависит от требований и конкретного применения.
Применение датчиков гироскоп
Датчики гироскопа широко применяются в различных областях, где требуется измерение угловой скорости или ориентации объекта. Вот некоторые из основных областей применения датчиков гироскопа:
Автомобильная промышленность
В автомобильной промышленности датчики гироскопа используются для стабилизации и контроля движения автомобилей. Они помогают определить угловую скорость и угол поворота автомобиля, что позволяет системам стабилизации и управления поддерживать его стабильность и безопасность на дороге.
Авиационная и космическая промышленность
В авиации и космической промышленности датчики гироскопа играют важную роль в навигации и стабилизации. Они используются для измерения угловой скорости, ориентации и угла наклона воздушных и космических судов. Это позволяет пилотам и системам автоматического управления точно определить положение и ориентацию объекта в пространстве.
Робототехника
В робототехнике датчики гироскопа используются для измерения угловой скорости и ориентации роботов. Это позволяет им точно определить свое положение и ориентацию в пространстве, что важно для выполнения задачи или навигации в окружающей среде.
Виртуальная реальность и игровая индустрия
Виртуальная реальность и игровая индустрия используют датчики гироскопа для отслеживания движения игрока. Они позволяют игрокам управлять персонажами или объектами в игре, используя свои движения и ориентацию тела.
Медицинская техника
В медицинской технике датчики гироскопа используются для измерения движения и ориентации внутри тела пациента. Они могут быть использованы, например, для навигации при хирургических операциях или для контроля движения при реабилитации пациентов.
Это лишь некоторые из множества областей, где применяются датчики гироскопа. Их точность и надежность делают их важным инструментом для измерения и контроля угловой скорости и ориентации объектов в различных приложениях.
Преимущества и ограничения датчиков гироскоп
Преимущества:
1. Высокая точность измерений: Датчики гироскопа обладают высокой точностью измерения угловой скорости и ориентации объектов. Это позволяет использовать их в различных приложениях, где требуется точное измерение и контроль движения.
2. Быстрая реакция: Датчики гироскопа обладают высокой скоростью реакции на изменение угловой скорости. Это позволяет быстро и точно определить изменение положения объекта и принять соответствующие меры.
3. Компактность: Датчики гироскопа могут быть очень компактными и легкими, что делает их удобными для установки в различных устройствах и системах.
4. Надежность: Датчики гироскопа обычно имеют высокую надежность и долгий срок службы. Они могут работать в широком диапазоне условий и выдерживать вибрации, удары и другие внешние воздействия.
Ограничения:
1. Дрейф: Датчики гироскопа могут иметь небольшой дрейф, то есть накопление ошибки измерения со временем. Это может привести к неточности в определении угловой скорости и ориентации объекта.
2. Чувствительность к внешним воздействиям: Датчики гироскопа могут быть чувствительны к вибрациям, ударам и другим внешним воздействиям. Это может привести к искажению измерений и ухудшению точности.
3. Зависимость от условий окружающей среды: Датчики гироскопа могут быть чувствительны к изменениям температуры, влажности и другим условиям окружающей среды. Это может повлиять на их работу и точность измерений.
4. Стоимость: Некоторые типы датчиков гироскопа могут быть довольно дорогими, особенно если требуется высокая точность и надежность. Это может быть ограничением для некоторых приложений с ограниченным бюджетом.
Несмотря на ограничения, датчики гироскопа остаются важным инструментом для измерения и контроля угловой скорости и ориентации объектов в различных областях, таких как авиация, робототехника, навигация и другие.
Таблица с информацией о датчиках гироскоп
| Тип датчика гироскоп | Принцип работы | Применение | Преимущества | Ограничения |
|---|---|---|---|---|
| Механический гироскоп | Основан на сохранении углового момента | Авиация, навигация, робототехника | Высокая точность, надежность | Большие размеры, высокая стоимость |
| Пьезоэлектрический гироскоп | Измерение изменения давления | Мобильные устройства, игровые контроллеры | Маленький размер, низкое энергопотребление | Ограниченная точность, влияние внешних факторов |
| Фотонный гироскоп | Измерение изменения фазы света | Автомобильная промышленность, навигационные системы | Высокая точность, компактность | Высокая стоимость, сложность калибровки |
Заключение
Датчики гироскопа являются важной частью робототехники и других технологий, где требуется измерение угловой скорости и ориентации. Они работают на основе принципа сохранения углового момента и могут быть реализованы в различных типах, таких как механические, оптические и микроэлектромеханические системы. Датчики гироскопа широко применяются в автомобилях, самолетах, мобильных устройствах и роботах для обеспечения стабильности, навигации и контроля движения. Они имеют множество преимуществ, таких как высокая точность, быстрая реакция и компактный размер, однако они также имеют ограничения, такие как дрейф и шум. В целом, датчики гироскопа играют важную роль в современных технологиях и продолжают развиваться для улучшения функциональности и эффективности.
Все, что вам нужно знать о датчиках гироскоп: принцип работы, типы и применение обновлено: 28 ноября, 2023 автором: Научные Статьи.Ру