Назначение и виды энкодеров
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Виды энкодеров
Существуют два вида энкодеров – инкрементальный и абсолютный.
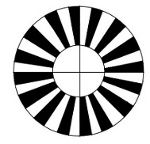
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.

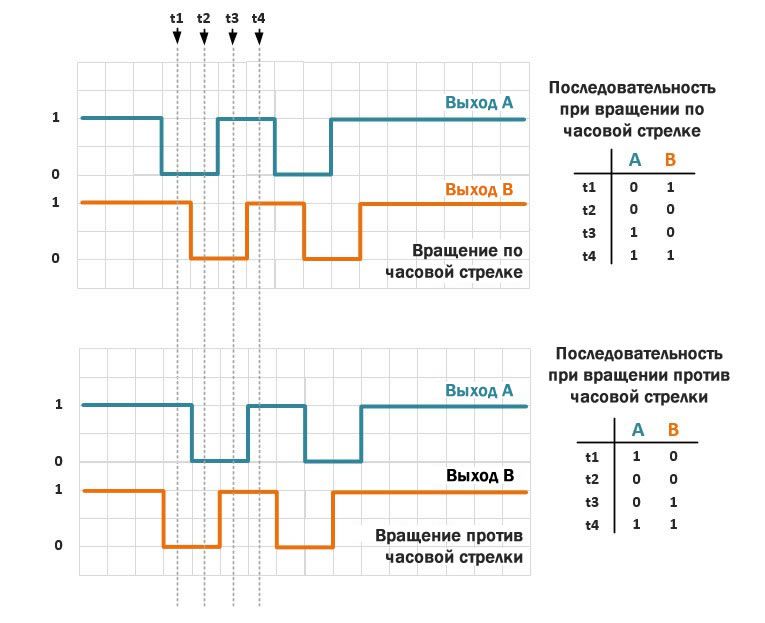
Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
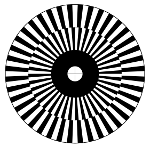
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Подключение
В простейшем случае, если позволяет ситуация, выход энкодера можно подключить ко входу счетчика и запрограммировать его на измерение скорости.
Но, как правило, энкодер используется совместно с контроллером. К контроллеру подключаются все необходимые выходы, и его программа рассчитывает скорость, ускорение, положение объекта с необходимыми коэффициентами и размерностями.
Например, энкодер установлен на валу электродвигателя, который перемещает одну деталь по направлению к другой. Путем вычислений на экране оператора отображается зазор между деталями, а при достижении некоторого минимального зазора движение деталей прекращается, чтобы избежать их повреждения.
Также преобразователи угловых перемещений нередко используются в качестве элемента обратной связи на валу двигателя, подключенного через частотный преобразователь. В этом случае энкодер устанавливается на валу двигателя или редуктора, и подключается к частотнику через специальную плату сопряжения. Таким образом, появляется возможность точного позиционирования поддержания нужной скорости и момента двигателя.
Что такое энкодер: типы и принцип работы
О том, что это устройство требуется для самых разных производственных задач, знают многие. При этом далеко не все четко понимают, как работает энкодер, что он собой представляет, для чего нужен энкодер и из чего состоит. Настоящая статья — небольшой ликбез на эту тему в вольном изложении. Надеемся, она кому-то окажется полезной. Начнем с матчасти.
Что такое энкодер?
Энкодер, также известный как датчик угла поворота и преобразователь угловых перемещений, — это специальное устройство для точного измерения характеристик вращающихся объектов (например, вала двигателя). Он регистрирует нужные параметры и формирует электрические сигналы, содержащие необходимую информацию.
Нужные параметры — это угол поворота вала, скорость его вращения, направление движения и местоположение вращаемой детали относительно базовой позиции. Подобные устройства требуются в самых разных направлениях производства, где нужны высокоточные измерения. Например, в машиностроении и робототехнике.
Применение энкодеров
Чаще всего их применяют в следующих сферах:
- Производство станков — направление специализированных предприятий, которые производят разнообразные станки и оборудование для металлообработки, запасные части и комплектующие к ним.
- Системы точного перемещения — технические решения, обеспечивающие высокоточное позиционирование. Такие системы могут быть как с ручным приводом, так и с линейным двигателем.
- Производство измерительного оборудования — контрольно-измерительных приборов, блоков преобразования сигналов, арматуры для датчиков давления и температуры и многого другого.
Также в некоторых сферах требуются высокопроизводительные датчики угла поворота, рассчитанные на эксплуатацию при высоких температурах и устойчивые к взрывам. Кроме перечисленных направлений, назначение энкодера может быть и иным:
- типография — энкодеры закрепляют на валах, по которым перемещается материал для печати (бумага, виниловая пленка, баннерная ткань и т. д.);
- автомобильная промышленность — для определения точного угла поворота колес или взаимодействия с двигателями;
- в производстве химических средств — для оборудования, обеспечивающего автоматизированную фасовку.
Типы энкодеров
По принципу работы, конструкции и форме выдаваемого сигнала преобразователи угловых перемещений делятся на два основных вида — инкрементальные (также называемые инкрементные) и абсолютные. Давайте разберем виды энкодеров и их ключевые особенности.
Инкрементальный энкодер
У такого энкодера принцип работы самый простой, как правило, его функциональных возможностей достаточно для большинства задач. Устройство представляет собой диск с прорезями. При вращении его просвечивает оптический датчик, который активируется или деактивируется в зависимости от того, в каком положении он находится относительно прорези.
По сути, устройство неспособно определить местоположение ручки, оно знает лишь направление, а количество делений поворота фиксирует контроллер. Результат работы такого преобразователя угловых перемещений — последовательность цифровых сигналов частоты, зависящей от его разрешения и частоты вращения.
Самый распространенный пример инкрементального энкодера в быту — это регулятор громкости акустической системы с цифровым управлением. Его отличает наличие шкалы с конкретными значениями, например, от 0 до 10. Другой пример — навигация по разнообразным меню.
Главные плюсы инкрементального энкодера — доступная цена, достаточная для большинства задач функциональность и легкость обработки сигналов (последовательных импульсов). В минусы устройства обычно записывают необходимость этой самой обработки выходных сигналов в постоянном режиме, а также инициализации для поиска нуль-метки или нулевого положения механизма.
Абсолютный энкодер
Такой преобразователь угловых перемещений лишен недостатков, характерных для инкрементальных устройств. Диск разбит на секторы одинакового размера, а выходной сигнал соответствует текущему углу поворота. Благодаря такой конструкции устройство фиксирует значение угла в любой момент времени, даже если механизм неподвижен. Присоединять систему отсчета датчика к определенному нулевому значению не нужно.
Более точный принцип действия энкодера абсолютного типа требуется далеко не всегда. В основном такие устройства приобретают для сложного оборудования, когда возможность знать точное позиционирование объекта в любой момент времени является критически важной. Недостатки таких преобразователей:
- они в несколько раз дороже инкрементальных;
- их выходной сигнал (параллельный код) сложнее обрабатывать.
Отличия энкодеров абсолютного типа тоже есть, они бывают однооборотными и многооборотными. Эта характеристика определяет сферу их эксплуатации. Однооборотные модели, как правило, применяют для измерения углов поворота. Они регистрируют абсолютное значение после одного совершенного оборота, затем код приводится в начальное значение.
Многооборотные модели, в свою очередь, снабжены дополнительным передаточным механизмом, с которым устройство также фиксирует количество оборотов. Такие энкодеры требуются для систем с линейным перемещением.
Оптический энкодер
По конструкции и принципу работы это устройство схоже с инкрементальным. Прибор представляет собой стеклянный диск, прочно зафиксированный на валу. Оптический датчик поворота преобразует момент вращения в поток света, принимаемый фоточувствительным датчиком.
Каждому положению диска этого устройства соответствует свой цифровой код. Вместе с количеством оборотов он представляет собой одну единицу измерения энкодера. Оптические преобразователи угловых перемещений бывают двух типов:
- Магнитные. При вращении вала они фиксируют прохождение полюса магнита, который расположен возле чувствительного элемента. Сигналы передаются в цифровой форме. Плюсы этого варианта — простая конструкция, меньше требований к условиям эксплуатации и более доступная стоимость.
- Фотоэлектрические. Эти устройства используют фотоэлектрический эффект, который вызывает попадание света на датчик и его преобразование в сигнал электрического тока. Фотоэлектрические энкодеры отличаются высокой чувствительностью, при этом обладают хорошей точностью.
Механический энкодер
В сравнении с перечисленными выше вариантами такое устройство можно назвать устаревшим, поскольку оно передает аналоговый сигнал. Материалом для изготовления диска служит диэлектрик с выпуклыми либо непрозрачными участками. Наличие контактов и переключателей делает возможным расчет значения абсолютного угла.
Главный минус механических энкодеров — их низкая надежность. Неизбежное разбалтывание контактов приводит к искажению сигнала и, соответственно, неверным или как минимум недостаточно точным показаниям. Ни один из более современных вариантов не имеет такого недостатка.
Есть и другие, менее известные энкодеры, устройство и принцип работы их могут отличаться от рассмотренных выше. Как правило, они менее распространены, поскольку имеют более существенные недостатки при отсутствии видимых преимуществ.
Подключение энкодера
Прежде всего важно понимать, что энкодер любого типа лишь формирует сигналы, на этом его функциональная роль заканчивается. Он передает их другому устройству для последующей обработки. Это может быть не только контроллер но и, например, счетчик, запрограммированный на измерение заданных параметров (в первую очередь — скорости).
Также энкодер подключают к преобразователям частоты, обеспечивающим питание электродвигателя. В этом случае появляется возможность точно позиционировать устройство и задавать определенную скорость, не используя для этого контроллер (векторное управление). В результате дальнейших расчетов можно получить данные о скорости вращения, его направлении, местоположении вала или другого объекта.
В случае с контроллером для соединения используют нужные выходы, при этом вычислением положения и скорости вала уже занимается программа. Типичный сценарий: энкодер, закрепленный на валу электродвигателя, который движется в сторону другого элемента конструкции. При достижении заданного расстояния между ними первый останавливается во избежание повреждений оборудования.
Физически энкодер в большинстве случаев подключают трех- или шестипроводной схемой, есть и другие варианты соединения. Главным фактором, влияющим на способ подключения датчика, является тип принимающего устройства. Крайне важно:
- не экономить на кабеле — использовать следует только тот, который рекомендован заводом-производителем;
- использовать дополнительный источник питания, если на принимающем устройстве нет клемм для питания датчика;
- не подключать высокоточный энкодер к источникам, используемым для питания реле и других датчиков (чревато помехами и неверными показаниями).
Как выбрать энкодер
Теперь, когда с матчастью покончено, перейдем к критериям выбора этого устройства. Проще всего, когда его приобретают для разрабатываемой системы — на этой стадии производится комплексный расчет всей инженерной конструкции. Соответственно, датчик подбирают в соответствии с конкретными требованиями технического задания.
Также бывают ситуации, когда этот прибор вышел из строя или стал работать нестабильно, оказался недостаточно надежен, дорог в обслуживании и т. д.
В первом случае — когда речь только о поломке — достаточно переписать маркировочные данные на корпусе энкодера и подобрать устройство с такими же характеристиками. Во втором случае — если необходимо приобрести прибор с другими параметрами — лучше всего обратиться к специалистам по подбору такого оборудования.
В общем случае при выборе энкодера принимают во внимание следующие факторы:
- Местоположение монтажа устройства. Важно заранее понимать, где оно будет устанавливаться, — внутри помещения или на улице. Во втором случае может понадобиться защита от влаги и посторонних мелких предметов (IP).
- Тип энкодера. Как правило, выбор лежит между инкрементальным, абсолютным или магнитным датчиком. Здесь нет никакого смысла приобретать в несколько раз более дорогой вариант с функциональностью, которая никогда не будет задействована.
- Тип выходного сигнала. Бывают ситуации, когда этот параметр играет очень важную роль в силу особенностей дальнейшей обработки информации. Здесь только специалист сможет сказать, какой конкретно сигнал ему нужен.
- Разрядность/разрешение. По сути, это количество создаваемых импульсов на один оборот диска. В зависимости от модели, эта характеристика может иметь значение от 1 до 5000 импульсов за оборот.
Последнюю характеристику — разрешение — рассмотрим более детально. Ее выбирают, отталкиваясь от скорости вращения вала электродвигателя — программная часть энкодера должна успевать генерировать сигналы. Важно заранее убедиться в том, что паспортное разрешение датчика соответствует частоте вращения вала исполнительного органа.
Обратим внимание на один очень существенный момент. Нет никакого смысла приобретать энкодер с более высоким значением разрядности, если контроллер или иное устройство, принимающее сигнал, не будет успевать считать все импульсы. В этом случае скорость и другие параметры могут быть рассчитаны неверно, точность будет низкой.
Более правильно начать вопрос выбора устройства и работы энкодера с количества импульсов на оборот диска, которого достаточно, чтобы обеспечить нужную точность. В случае с электродвигателем с асинхронным короткозамкнутым ротором выбранная разрядность будет определять поведение системы.
Если эта характеристика очень мала, то вал мотора может двигаться с рывками. Также система может работать некорректно при удержании вала на нулевой скорости. Точно же предсказать, как в этом случае будет вести себя мотор, невозможно, не зная логики работы привода. Самый доступный способ подобрать подходящий вариант — проверять, как работает система при разных комбинациях привода, электромотора и энкодера.
По всем вопросам, связанным с энкодерами, их обслуживанием и ремонтом, вы можете обратиться в инженерную компанию 555. Звоните по любому телефону, чтобы выяснить все интересующие вопросы.
Инкрементальный энкодер: что это такое, принцип работы, виды, для чего используется
Энкодер можно отнести к достаточно новым техническим устройствам, которые были бы невозможны без появления робототехнической области науки. Данная разновидность устройств необходима в целях изменения и контроля углов поворотов валов на электродвигателях. Они также используются с целью изменения движения в тех или иных элементах роботов.

Разновидности
Различаются следующие виды энкодеров:
- абсолютного типа;
- инкрементального типа.
Абсолютная модель выдает уникальные цифровые коды относительно отдельно взятого расположения вала, потому становится возможным определять углы поворота даже после того, как было отключено электропитание.
Энкодеры инкрементального вида выдают импульсный цифровой код для каждого отдельно взятого положения вала электромотора. Такие устройства позволяют определять, с какой скоростью вращается вал во время отключения электропитания в том случае, когда нет необходимости сохранять информацию об абсолютном угловом положении.
Иначе говоря, в то время, когда вал не движется, импульс не поступает. Следовательно, когда он снова приходит в движение, датчики будут вести отсчеты его угловых параметров с исходной позиции.
Инкрементальный энкодер

Импульсные (они же пошаговые) энкодеры относят к той разновидности энкодирующих устройств, что предназначены с целью указания направлений углового перемещения всевозможных внешних механизмов. Пошаговые энкодеры формируют импульсы, число которых соответствует числу поворота вала на определенные углы. Они связаны со счетными приборами – это требуется для того, чтобы можно было считать импульсы и преобразовывать их в измерения перемещения вала.
Конструктивные особенности
Конструктивной особенностью данной разновидности можно считать наличие следующих элементов:
- источник света;
- специальный диск с нанесенными на нем отметками;
- фототранзисторная сборка;
- схемы для обрабатывания сигналов.
Метки, нанесенные на диск, распределяются определенным образом – их число будет определяться числом импульсов, осуществленных в рамках одного оборота. К примеру, если диск разделяется на 1000 меток, то в продолжение 250 импульсов вал будет повернут под прямым углом.
Применяемые технологии – магнитная и оптическая
Сегодня энкодеры работают, как правило, на основании двух технологий – оптической и магнитной.
Так, в приспособлениях оптического типа в качестве первичных датчиков сигналов выступают оптические диски, описанные выше. Число зачерненных и прозрачных отметок, расположенных на диске, будет определять и степень разрешения.
Но в последнее время популярность начинают приобретать энкодеры магнитного типа. В них сигналы положения вала двигателя формируются специальным датчиком. При этом открываются новые технологические возможности, к примеру, программируемое число импульсов за один оборот.
Квадратура выхода
В качестве так называемой квадратуры выхода в данном виде энкодирующих устройств применяется пара выходных каналов. Они позволяют определять, в каком именно направлении происходит вращение вала.
При этом энкодеры, оборудованные всего одним выходом (на схеме обозначается литерой А), носят название тахометров.
Максимальная частота ответа
В качестве максимальной частоты ответа выступают частоты, при которых работающий энкодер дает электрические ответы. Максимальные частоты определяют число импульсов на выходе, на которые он отзывается в течение одной секунды.
Таким образом, пошаговые энкодеры должны удовлетворять следующему отношению:
(rpm / 60)x(разрешение) меньше или равно максимальной частоте ответа.
Разрешение
Под разрешением подразумевают число выходных импульсов при каждом вращении вала.
Соединительный вал
Чтобы вал датчика был соединен механическим способом, нужно применять специальные гибкие соединители – эластичные муфты. Они предназначены для того, чтобы компенсировать возможное биение вала в любых направлениях.
Благодаря этому, снижается степень преждевременного выхода из строя валового механизма датчика. Даже минимальные люфты могут вывести энкодер из строя.
Виды пошаговых энкодеров и их особенности
Кроме предложенной выше классификации, инкрементальные энкодирующие устройства можно поделить согласно типу информации для считывания.
Одиночные нужны для простого подсчета числа импульсов.
- максимальная простота в конструкции и использовании;
- во время запуска непонятно, в каком именно положении находится;
- велика вероятность ошибок во время подсчета импульсов из-за ложного срабатывания;
- нельзя определить направленность движения.
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступаемых импульсов, но и направление движения.
- простота конструкции;
- практически отсутствуют ошибки во время счета импульсов;
- можно определять направленность движения.
- во время запуска непонятно, в каком именно положении находится энкодер.
Энкодирующие устройства, построенные на двоичном коде, позволяют определять точное положение устройства в тот или иной момент.

- инициализация происходит без ошибок;
- нет необходимости в считывании импульсов;
- можно определять направленность движения.
- из-за наличия нескольких датчиков аппарат несколько сложнее;
- возникновение проблем с граничным положением в случае использования более одного бита;
- разрешающая способность несколько ограничена.
Энкодирующие устройства, основанные на так называемом коде Грэя, дают возможность определять положение в данный момент.

- безошибочная инициализация и подсчет импульсов;
- можно определять, в каком направлении происходит вращение;
- можно использовать более одного бита без риска возникновения ошибок на граничном положении.
- относительно сложны в использовании;
- присутствует определенное ограничение по разрешению.
Некоторые особенности подключения
При подключении и отладке энкодеров необходимо строго придерживаться рекомендаций, данных производителем.
Для начала нужно собрать исходную схему, согласно инструкции от производителя, и подключиться к выводам А и В с помощью осциллографа. Далее необходимо подкрутить подключаемый энкодер сначала по часовой стрелке, а затем – в противоположном направлении. При изменении направления вращения будет изменяться и последовательность замыкания контактных пластин.
Поскольку в энкодерах работают контакты механического типа, то всегда есть риск возникновения так называемого дребезга. Это приводит к тому, что контакт может замыкаться и размыкаться самопроизвольно – из-за естественной упругости материала.
Чтобы избежать дребезга, можно пойти двумя путями. Например, добавить еще несколько конденсаторных или резисторных элементов. Дребезги в этом случае можно довольно легко погасить. При этом осциллограф покажет крутые фронты и отсутствие дребезга.
А вот второй метод является программным. Это потребует от исполнителя знаний программирования. Зато можно будет отслеживать состояние энкодирующего устройства при помощи внешнего прерывания. В этом случае необходимо организовать задержки в течение 2-3 десятков миллисекунд после каждого срабатывания прерывания. В это время энкодер перестанет фиксировать изменения состояний вывода, следовательно, перестанет быть чувствительным к дребезгам.
Используется несколько методов обработки данных, поступающих с прибора. Например, одна из его ножек подключается к выходу для внешнего прерывания и настраивается на прерывание по спадающим фронтам. При этом проверяется положение второй ножки. В том случае, если на ней фиксируется нулевое состояние, движение вала осуществляется в одном направлении. При этом светодиоды загораются или гаснут в зависимости от направления вращения.
Согласно второму методу, нужно сравнить настоящее положение с предыдущим. Например, предыдущее состояние энкодера равнялось трем. Если последующее положение равняется одному, то вращение осуществляется в одном направлении. Если же оно равно двум, соответственно, в другом. Таким образом, можно будет осуществлять фиксацию перехода из одного положения устройства в другое, и устанавливать направление движения вращения.
Крепление устройства с вращающимися объектами осуществляется через нормальные или полые валы. При этом полый вал может быть выполнен как в сквозном, так и в несквозном варианте. Здесь все зависит от конкретных конструктивных особенностей устройства и преследуемых целей.
Валы энкодера и вращающихся объектов соединяются также с помощью гибких или жестких соединительных муфт. Как альтернативный вариант крепления, нередко используют монтаж прямо на вал самого объекта. Это возможно, если аппарат оснащен полым валом. Чтобы не допустить возможного возникновения несоосности и биений, можно зафиксировать его через штифты. Если же речь идет о неполом вале, то биение может быть скомпенсировано через гибкую деформацию втулки.
Чем привлекательны данные виды энкодеров
Энкодирующие устройства неспроста получили столь обширное распространение при конструировании большого спектра устройств. Они довольно дешевы и просты в монтаже.
Чтобы выбрать верный вариант для успешного внедрения в те или иные управленческие схемы, потребуется определиться:
- Насколько точно требуется проводить измерения. Об этом будет говорить число обрабатываемых импульсов за каждый оборот энкодирующего вала.
- Толщина вала, а также его модельная разновидность. Это влечет за собой необходимость в правильном подборе дополнительного оборудования, такого, как муфты, фланцы и т.д.
- Определиться с необходимой длиной кабеля, его поперечным сечением, а также с типом разъемов на выходе.
- Потребуется принять во внимание величину рабочего напряжения и прочие электрические характеристики.
- Осуществление связи энкодирующего оборудования с остальными элементами системы. Нужно будет уметь его программировать, обеспечивать параметры цикличности осуществления передачи результата замеров с частотностью опроса на входе используемых контроллеров, либо предусмотреть работу в стандартном интерфейсе.
Где применяются инкрементальные энкодеры
Устройства предлагаются в разных моделях и вариантах исполнения. Следует внимательно подходить к выбору энкодеров. К примеру, если он работает на благо пищепрома, то следует использовать только те разновидности, которые соответствуют нормам гигиены. Как правило, они выполнены из нержавеющих материалов.
В области печатного и текстильного производства датчики обычно дополняют аппаратами для обрабатывания данных.
Инкрементные энкодеры устанавливаются на транспортерах, предназначенных для перемещения древесных заготовок.
Если требуется использовать энкодер при металлообработке, то прибор следует оснастить специализированной защитой от вибрационных воздействий, а также от повышенных температур и попадания внутрь механизма частичек влаги и пыли. На электрические моторы устанавливаются особые виды энкодеров, способных замерять скорости оборотов шпинделя, положение оси и ее продвижение.
Если речь идет о системе автоматизации на производствах, то используются мини-энкодеры диаметром не более 2,5 см и имеющие различные диапазоны напряжений на выходах.
Лифтовые устройства работают на приспособлениях диаметром 4,4 см. Часто их монтируют прямо на лебедках для того, чтобы снизить воздействие на них механического характера.
В медицинском оборудовании датчики-энкодеры применяются в ЭМРТ. Они предназначены для исключения воздействия магнитного поля. Корпус в этом случае изготавливают из непроводящего материала.
В телекоммуникационной сфере энкодеры используются для определения расположения и направленности антенны. Иногда нужно применять датчики для работы в жестких условиях.
Находят свое применение энкодирующие аппараты и в области альтернативной энергетики. К примеру, они устанавливаются на программируемых датчиках, используемых в солнечной ферме. Датчики изготавливаются из специализированных материалов, которые надежно защищены от попадания влаги и ультрафиолета.
Крайне распространены сегодня электромеханические энкодеры, преобразующие вращательные движения в аналоговые или цифровые форматы распространения информации. Они довольно схожи с потенциометрами, однако могут постоянно осуществлять вращение как в направлении часовой стрелки, так и в обратную сторону.
Поворотные энкодеры различаются по нескольким типам. Как уже отмечалось, это абсолютные и инкрементальные – они же относительные. Первому типу выдают значения, которые пропорциональны настоящему углу расположения вала. Второй тип выдает как шаг передвижения валов, так и их направленность. Благодаря этому, именно энкодирующее оборудование поворотного типа получает все большее распространение в различных сферах бытовой электротехники. Главным образом, это конструирование всевозможных управляющих ручек. Часто такие устройства могут заменить потенциометр или кнопки для осуществления навигации.
Если необходимо выполнить быструю навигацию и настройку, либо оперативное введение данных и выбора пунктов меню, то энкодеры также придут на помощь.
Определенные модели имеют специальные кнопки, создающие дополнительные входы для процессоров, которые могут применяться как другие пользовательские команды в организации управленческого интерфейса.
Вы всегда можете приобрести энкодеры Omron и Sick по привлекательным ценам в нашем интернет-магазине.
Принцип работы инкрементального энкодера
Инкрементальные энкодеры, в отличие от абсолютных, выдают информацию о положении относительно положения в предыдущий момент времени. После включения питания вся информация о предыдущих перемещениях пропадает и положение вала становится неопределённым. Как правило в таком случае механизм приходится перемещать в некоторое известное положение для того чтобы информация о положении снова стала актуальной.
Применяемые технологии
Работа современных энкодеров базируется на использовании определенных физических принципов, основными из которых являются магнитный, ёмкостной и оптический. Для определения положения объекта ёмкостной принцип предполагает использование изменений электрического поля, магнитный – изменений магнитного поля, оптический – изменений пучков света.

Оптические
Оптические датчики угла поворота используют изменения световых пучков, происходящие во время кругового движения кодового диска, с которым взаимодействуют пучки света. Работа оптических энкодеров основана на двух схемах: пропускательной и отражательной.
В случае пропускательной схемы световые пучки попадают на фотоприемники после прохождения через узкие отверстия в кодовом диске.
При отражательной схеме на кодовом диске происходит чередование зеркальных и рассеивающих участков. Отражающийся от зеркальных участков свет, попадает в приёмник оптического излучения.
Кодовый диск инкрементного энкодера (слева) и абсолютного энкодера (справа)
Магнитные
Магнитные энкодеры для работы используют изменения магнитного поля, которые происходят во время кругового движения кодового диска. В зависимости от способа измерения изменений, магнитные датчики углов поворота делятся на следующие виды:
- индуктивные – изменения, происходящие с магнитным полем, измеряются по изменениям взаимной индуктивности обмоток, находящихся на неподвижной и вращающейся части энкодера;
- магнитно-резистивные – в таких датчиках в качестве чувствительного элемента используются материалы, которые в магнитном поле изменяют свое сопротивление;
- на датчиках Холла – изменения магнитного поля оцениваются с помощью датчиков на эффекте Холла.
Ёмкостные
Принцип действия базируется на оценке изменений электрического поля, которые происходят при круговом движении кодового диска специальной конфигурации. Изменения емкости конденсатора, образованные вращающимся кодовым диском и обкладками на неподвижной части энкодера, является основанием для оценки электрического поля.
Выходной сигнал
Выходной сигнал инкрементального энкодера чаще всего представляет собой 2 импульсных сигнала со скважностью 50% сдвинутых относительно друг друга на 90°. Сигналы с этих двух каналов (квадратура выхода (обычно A и B)) позволяют определить направление вращения энкодера и величину углового перемещения. Направление вращения определяется опережением или отставанием импульсов одного из каналов относительно второго канала. Величина перемещения определяется по количеству импульсов на этих двух каналах. Для обработки выходного сигнала применяются специализированные счётчики импульсов, либо отдельно стоящие либо интегрированные в микропроцессоры , микроконтроллеры или ПЛК. В зависимости от способа обработки сигнала с энкодера можно получать информацию о положении или о скорости. Такая гибкость позволяет широко применять энкодеры в современных системах автоматического управления в качестве датчиков обратной связи по обоим этим величинам.
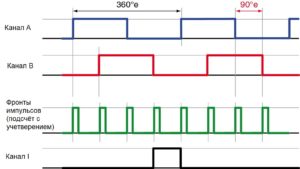
В ряде случаев энкодер оснащается третьим каналом – индексным (обозначают I или Z). Импульс на нём появляется один раз за полный оборот энкодера. Этот импульс позволяет контролировать показания с каналов A и B, а также облегчает привязку показаний инкрементального энкодера к реальному положению механизма.
Основные параметры
Разрешение
Разрешение инкрементального энкодера определяет какое минимальное перемещение вала датчика приводит к изменению сигнала на выходе датчика. У всех инкрементальных энкодеров разрешение приводится в полных циклах на один оборот. Под одним полным циклом подразумевается полный цикл измерения сигналов на двух основных каналах энкодера (A и B). При обработке сигнала инкрементального энкодера часто пользуются подсчётом импульсов «с учетверением». В этом случае подсчитывается каждый фронт (передний и задний) по обоим основным каналам энкодера A и B. Легко видеть что за время полного цикла таких фронтов будет 4 – 2 по каналу A и 2 по каналу B. Таким образом при такой обработке количество отсчётов на один оборот энкодера будет в 4 раза больше чем разрешение указанное в полных циклах.
Интерфейс
Все инкрементальные энкодеры имеют интерфейс в виде двух импульсных сигналов, а некоторые имеют и дополнительный индексный канал. Отличия могут заключаться в напряжении импульсных сигналов и в наличии дифференциального выхода (драйвера линии).
Импульсный сигнал формируемый на выходе инкрементального энкодера принимает 2 значения – максимальное и минимальное. Минимальное значение в большинстве случаев соответствует нулю. Максимальное значение может быть или фиксированным (напр. 3,3 В, 5 В) так и зависеть от напряжения питания поданного на энкодер (например на 1В или на 2 В меньше напряжения питания).
По способу формирования выходного сигнала можно выделить энкодеры:
- с несимметричным выходом
- с дифференциальным выходом (с драйвером линии).
В случае несимметричного выхода сигналы всех трёх импульсных каналов формируются относительно общей точки источника питания (0 источника питания). Такой сигнал достаточно прост при использовании и экономичен с точки зрения числа подключаемых проводов, однако уязвим для электромагнитных помех в случае передачи по проводам значительной длины. Сигнал энкодеров с дифференциальным выходом лишён этого недостатка. Для каждого канала при помощи специального формирователя вместо одного сигнала формируется пара сигналов – нормальный и логически инверсный, а соответствующий приёмник принимает сигнал по разности этой пары сигналов. Это позволяет устойчиво передавать сигнал по длинным проводам (десятки и сотни метров) даже при наличии помех.
Скорость вращения
Важным параметром о котором не следует забывать является максимальная скорость вращения при которой происходит корректная выдача выходного сигнала. Именно от него зависит можно ли будет установить инкрементальный энкодер на валу скоростных бесколлекторных двигателей или же его можно будет использовать только на выходе мотор-редукторов и сравнительно медленных моментных двигателей.
Когда применяют инкрементальные энкодеры
Вопрос о том какие энкодеры предпочтительней применить в той или иной системе неразрывно связан с требованиями, предъявляемыми к ней. Если сразу после подачи питания на систему датчик должен выдавать правильное положение, то тогда лучше применить абсолютный энкодер. А если после старта допускается период подготовки системы к работе когда можно провести вывод механизма в нулевое положение, то тогда можно применять инкрементальный энкодер.
Инкрементные энкодеры имеют более простую конструкцию, поэтому среди них можно найти модели очень компактных размеров, недостижимых для абсолютных датчиков. Этим определяется применение инкрементных энкодеров в малогабаритных системах.
Если энкодер используется только для определения скорости вращения механизма, то для выполнения этой функции достаточно инкрементного энкодера.
Области применения
Инкрементальные энкодеры являются одним из самых распространённых датчиков в современных сложных технических системах. Вот лишь некоторые примеры:
- Медицинская техника
- Автоматизированное тестовое и диагностическое оборудование
- Самодвижущиеся роботоподобные устройства
- Системы контроля доступа