6.8 Потери и кпд машин постоянного тока
При работе генератора (или двигателя) постоянного тока полезная (выходная) мощность, отдаваемая машиной, всегда меньше подводимой от первичного двигателя (или сети) за счет наличия нескольких видов потерь мощности.
Электрические потери возникают в обмотке якоря, в обмотке возбуждения, обмотке добавочных полюсов и в щеточном контакте.
Потери в стали складываются из потерь на перемагничивание (гистерезис) и вихревые токи в стальном сердечнике якоря при его вращении в постоянном магнитном поле.
Механические потери обусловлены потерями на трение в подшипниках, щеток о коллектор, потерями на вентиляцию и составляют от (1…4)%.
Добавочные потери обусловлены потерями в стали полюсных наконечников от пульсации магнитного потока при вращении зубчатого якоря, и составляют 1% от отдаваемой мощности для генераторов и 1% от потребляемой мощности для двигателей.
КПД машины определяется отношением полезной мощности Р2 к потребляемой мощности Р1 и составляется: для генераторов
где UI – мощность, отдаваемая потребителю; ∑∆Р – суммарные потери.
где UI – мощность, потребляемая двигателем от сети.
КПД машины постоянного тока зависит от нагрузки (рисунок 6.9) и при номинальной мощности составляет от 75 до 95%.
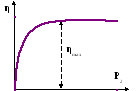
Рисунок 6.9 – Зависимость КПД машины постоянного тока от нагрузки
7 Асинхронные и синхронные машины
Цель лекции: Ознакомление с устройством, принципом действия, режимами работы и основными характеристиками асинхронных и синхронных машин.
Асинхронные машины
7.1. Устройство асинхронных машин
Асинхронные машины являются самым распространенным видом бесколлекторных электрических машин переменного тока. Асинхронная машина – машина переменного тока, у которой в установившемся режиме магнитное поле статора, участвующее в основном процессе преобразования энергии, и ротор вращаются с разными скоростями.
Преобладающее применение имеют асинхронные двигатели, составляющие основу современного электропривода: привод устройств автоматики, бытовые электроприборы, привод крупного горного оборудования.
Асинхронные двигатели могут быть как однофазными, так и трехфазными. Кроме асинхронных двигателей, преобразующих электрическую энергию переменного тока в механическую энергию, имеются асинхронные машины, выполняющие функции преобразователя частоты, регулятора напряжения и фазорегулятора.
Асинхронный двигатель состоит из двух частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. Обмотка статора включается в сеть и является первичной, а обмотка ротора – вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками. По конструкции асинхронные двигатели разделяются на двигатели: с короткозамкнутым ротором и двигатели с фазным ротором.
Двигатели трехфазного асинхронного двигателя с короткозамкнутым ротором, (рисунок 7.1) имеют наиболее широкое применение. Статор состоит из корпуса и сердечника с трехфазной обмоткой. Каждая фазная обмотка состоит из одной или нескольких катушечных групп, которые располагаются по окружности статора на одинаковом расстоянии друг от друга. Фазные обмотки соединяются треугольником или звездой и подключаются к трехфазной сети. Корпус двигателя отливают из алюминиевого сплава или из чугуна. Поверхность корпуса имеет продольные ребра для охлаждения двигателя. В корпусе расположен сердечник статора, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены скобами или сварными швами. Такая конструкция уменьшает вихревые токи, возникающие в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные лобовыми частями.
В расточке статора расположен ротор, состоящий из вала и сердечника с обмоткой, представляющей собой алюминиевые или медные стержни, расположенные в пазах сердечника ротора и замкнутые с двух сторон короткозамыкающими кольцами. Сердечник ротора также имеет шихтованную конструкцию, но листы ротора не покрыты изоляционным лаком, а имеют на своей поверхности тонкую пленку окисла.
Другая разновидность трехфазных асинхронных двигателей – двигатели с фазным ротором – конструктивно отличается устройством ротора, который имеет более сложную конструкцию. На валу ротора закреплен шихтованный сердечник с трехфазной обмоткой, выполненной аналогично обмотке статора. Эту обмотку соединяют звездой, а ее концы присоединяют к трем контактным кольцам, на которые накладывают по две щетки, располагаемые в щеткодержателях на валу. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но обладают лучшими регулировочными и пусковыми свойствами.
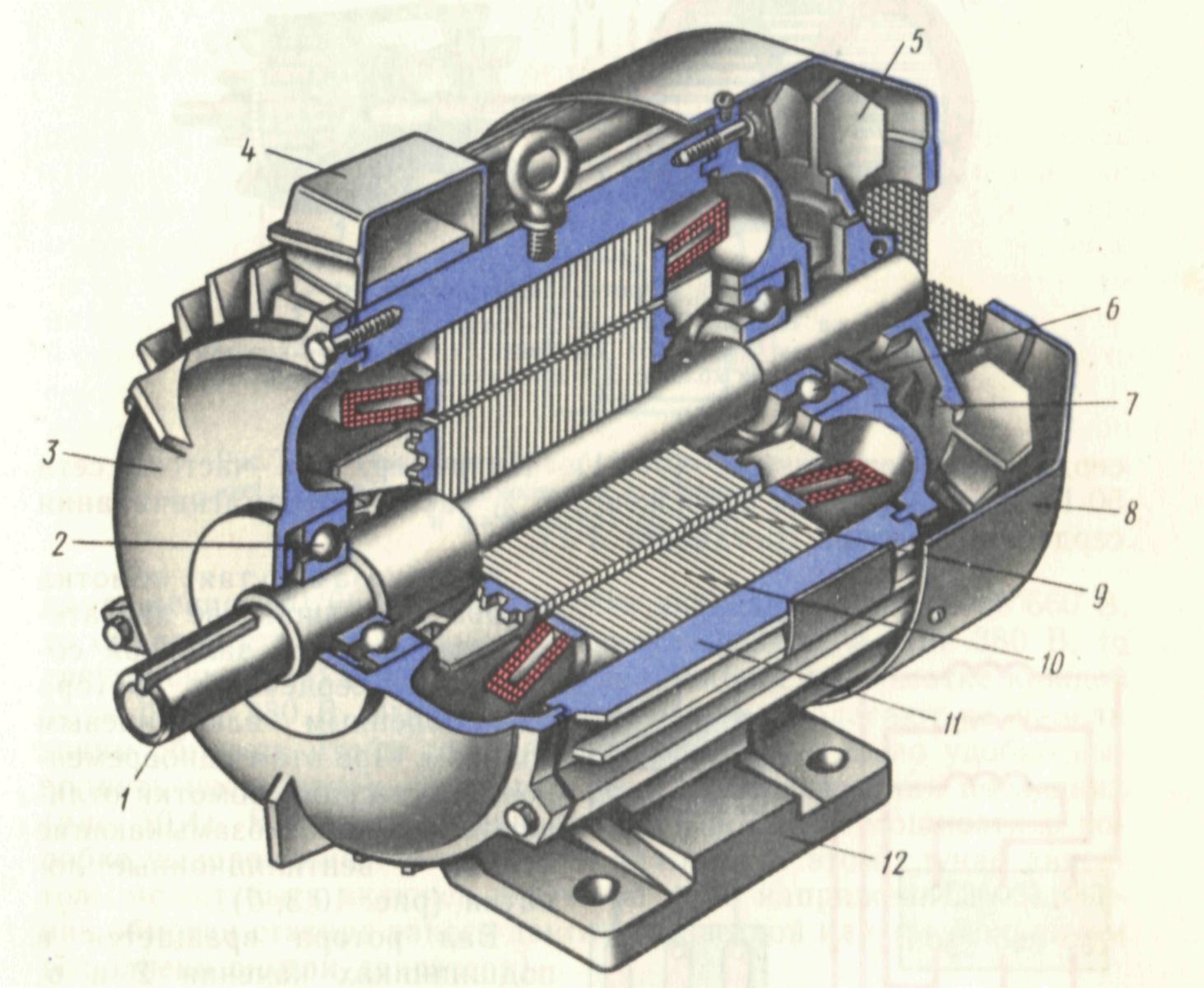
Рисунок 7.1. Асинхронный двигатель с короткозамкнутым ротором:
1 – вал; 2, 6 – подшипники; 3, 7 – подшипниковые щиты; 4 –коробка выводов; 5, 8 – вентилятор и его кожух; 9 – сердечник ротора с короткозамкнутой обмоткой; 10 – сердечник статора с обмоткой; 11– корпус; 12 – лапы
6.5. Коэффициент полезного действия двигателя
Преобразование электрической энергии в механическую при работе ДПТ сопровождается потерями энергии. Отношение полезной механической мощности Р2 на валу двигателя к потребляемой из сети электрической мощности Р1 определяет коэффициент полезного действия (КПД) двигателей
η =  ∙ 100% =
∙ 100% = ∙ 100%
∙ 100%
Полезная механическая мощность Р2 , снимаемая с вала двигателя, рассчитывается по формуле
Р2 = 0,105 М∙n , Вт (6.9)
где М = МС – момент сопротивления на валу двигателя, Нм;
n – частота вращения вала двигателя, об/мин.
Так как двигатель обладает «саморегулированием», то вращающий момент, развиваемый двигателем, равен моменту сопротивления на его валу, т.е. МВР = МС = М, поэтому, зная полезную мощность двигателя, можно определить его вращающий момент по выражению

М = 9,55 , Нм (6.10)
Потребляемая двигателем мощность Р1 определяется по формуле
Р1 = U∙I = U∙ (Iя + Iв) , Вт (6.11)
где U – напряжение питания двигателя.
I = Iя + Iв — ток, потребляемый из сети двигателем с параллельным возбуждением.
ΔР = ΔРэ + ΔРст + ΔРмех — сумма всех потерь двигателя постоянного тока, Вт.
где ΔРэ – электрические потери;
ΔРст – потери в стали статора и якоря;
ΔРмех – механические потери.
Электрические потери ΔРэ являются переменными, так как зависят от нагрузки и их значения может быть представлено как
где ΔРя = Iя 2 Rя – потери в обмотке якоря (при номинальном режиме составляют 50% всех потерь);
ΔРв = Iв 2 Rв – потери в обмотке возбуждения;
ΔРщ = Iя 2 ΔUщ – потери на коллекторно-щеточном контакте;
ΔUщ – падение напряжения между щеткой и коллектором (зависит от материала щеток: ΔUщ = 2 В для графитовых и 0,6 В для металлографитовых щеток.)
Потери в стали ΔРст связаны с вихревыми токами и перемагничивании якоря при его вращении и составляет 1 – 3% от номинальной мощности двигателя.
Механические потери ΔРмех связаны с трением движущихся частей двигателя и составляют 1 -2 % от номинальной мощности двигателя. Эти потери, как и потери в стали, являются постоянными и не зависят от нагрузки двигателя. Их называют потерями холостого хода.
При работе ДПТ вхолостую Р2 = 0 и η= 0 при увеличении полезной мощности Р2 КПД растет. Двигатели рассчитывают так, чтобы максимальное значение КПД соответствовало номинальной мощности двигателя (при этом постоянные потери равны переменным). При нагрузке больше номинальной КПД уменьшается за счет значительного роста переменных потерь. Для машин мощностью 1 – 100 кВт номинальное значение КПД лежит в пределах 74 – 92 %.
6.6. Основные характеристики двигателя постоянного тока
Основными характеристика ДПТ, получаемыми теоретически или экспериментально, являются его механическая характеристика, а также рабочая и регулировочная характеристики.
Механической характеристикой двигателя называется зависимость частоты вращения якоря n от момента М на валу двигателя: n = f(М). Уравнением механической характеристики является выражение (6.7).
Механическая характеристика двигателя с параллельным возбуждением представляет собой прямую с незначительным наклоном по мере роста момента на валу (рис.6.7). Такая характеристика называется «жесткой».

n




Рис. 6.7. Механическая характеристика ДПТ с параллельным возбуждением.
Жесткость механической характеристики объясняется тем, что при параллельном включении обмотки возбуждения, с ростом момента нагрузки, ток возбуждения Iв, а следовательно, и магнитный поток двигателя Ф остаются неизменными, а сопротивление якоря Rя сравнительно мало.
Рабочие характеристики ДПТ представляют собой зависимости частоты вращения n, момента М, тока якоря Iя и КПД η от полезной мощности Р2 на валу двигателя при неизменном напряжении на его зажимах U = const. Рабочие характеристики ДПТ с параллельным возбуждением представлены на рис. 6.8.
Зависимость полезного момента на валу двигателя от нагрузки Р2 представляет собой почти прямую линию, так как момент этого двигателя пропорционален нагрузке на валу: М = 9,55 Р2/n. Искривление указанной зависимости объясняется некоторым снижением частоты вращения с увеличением нагрузки. При Р2 = 0 ток, потребляемый электродвигателем равен току холостого хода. При увеличении мощности, развиваемой электродвигателем, ток якоря увеличивается приблизительно по той же зависимости, что и момент нагрузки на валу, так как при условии Ф = const токе якоря пропорционален моменту нагрузки.
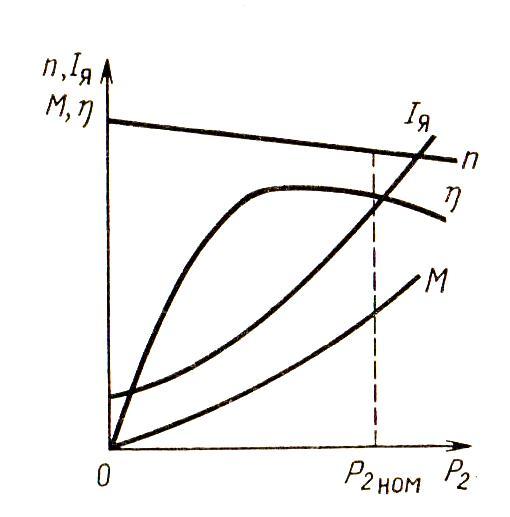
Рис. 6.8. Рабочие характеристики ДПТ с параллельным возбуждением.
В соответствии с тремя вышеуказанными способами регулирования частоты вращения двигателя, его регулировочными характеристиками являются зависимости: n = f (Rя), n = f (Iв), и n = f (U),
где Rя – сопротивление якорной цепи, равное сумме сопротивлений самого якоря и реостата регулирования тока возбуждения;
Iв – ток возбуждения, вызывающий пропорциональный ему магнитный поток возбуждения Ф;
U – напряжение, подаваемое на обмотку якоря, при соблюдении условия Ф = const, т.е. Iв = const.
Примерный вид регулировочных характеристик, получаемых из выражения (6.7) при условии М = const, представлен на рис. 6.9.
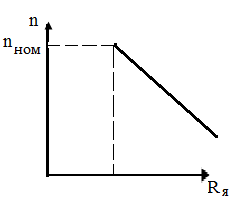
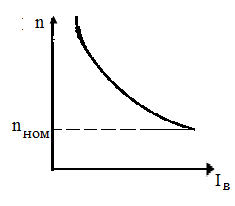
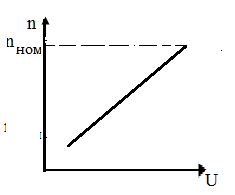
Рис. 6.9. Регулировочные характеристики ДПТ с параллельным возбуждением: а) n = f (Rя), б) n = f (Iв) с) n = f (U).
31. Потери в машинах постоянного тока. Коэффициент полезного действия. Кпд и потери мощности машин постоянного тока
Потери в электрических машинах делят на основные и добавочные. К основным потерям относят электрические, магнитные и механические.
Электрические потери ΔРэлили потери в меди обмоток, состоят из потерь в активных сопротивлениях обмоток и потерь в переходном сопротивлении щеточного контакта. Они определяются, как суммарные потери в обмотке якоря
где Rя– сопротивление цепи обмотки якоря с учетом переходного сопротивления щеточного контакта.
Магнитные потери или потери в стали обозначают ΔРс. В процессе работы сердечник якоря машины постоянного тока перемагничивается. Поэтому в сердечнике якоря возникают потери на вихревые токи и гистерезис.
Механические потери ΔРмехсостоят из потерь на трение в подшипниках, потерь на трение щеток о коллектор, потерь на трение вращающихся частей машины о воздух, а также потерь вентиляционных.
Все потери, неучтенные как основные, называются добавочными. Добавочные потери возникают в стали сердечника и обмотке якоря. В стали – из-за искажения основного поля реакцией якоря, вследствие зубчатого строения сердечника якоря, потери в стяжных болтах и в проволочных бандажах и т.п. В обмотке якоря — в коммутирующих секциях, от вихревых токов в обмотке, в уравнительных соединениях.
Суммарные потери равны

.
В режиме холостого хода электрические потери незначительны, мощность потребляемая машиной из сети
Потери холостого хода называют постоянными потерями, так как они не зависят от нагрузки.
Электрические потери называют переменными потерями
Коэффициент полезного действия (КПД) определяется как отношение полезной, или отдаваемой, мощности P2к потребляемой мощности P1
100 %.Или в процентах
Электрическая мощность, потребляемая двигателем из сети P1=Pя+Pв,
Для двигателя параллельного возбуждения
Механическая мощность на валу двигателя, отдаваемая приводному механизму P2=ωМ.
Современные машины постоянного тока имеют высокий КПД, который в зависимости от мощности, колеблется в пределах ηн = 0,75÷0,96. Высшее значение КПД относится к машинам большей мощности.
32. Пуск двигателей постоянного тока
Способы пуска. Для двигателей постоянного тока могут быть применены три способа пуска:
1) прямой, при котором обмотка якоря подключается непосредственно к сети;
2) реостатный, при котором в цепь якоря включается пусковой реостат для ограничения тока;
3) путем плавного повышения питающего напряжения, которое подается на обмотку якоря.
Прямой пуск. Обычно в двигателях постоянного тока падение напряжения Iном ΣRа во внутреннем сопротивлении цепи якоря составляет 5 — 10% от Uном , поэтому при прямом пуске ток якоря Iп = Uном /ΣRа = (10 ÷ 20)Iном , что создает опасность поломки вала машины и вызывает сильное искрение под щетками. Поэтому прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление ΣRа относительно велико, и лишь в отдельных случаях для двигателей с последовательным возбуждением мощностью в несколько киловатт. При прямом пуске таких двигателей Iп = (4 ÷ 6)Iном .
Переходный процесс изменения частоты вращения n и тока якоря ia в процессе пуска определяется нагрузкой двигателя и его электромеханической постоянной времени Тм . Для установления характера изменения п и ia при пуске двигателей с параллельным возбуждением исходим из таких уравнений:
U = се Фn + ia ΣRа + La dia /dt;
М = см Фia = Jdω/dt + Mн = J(2π/60) dn/dt + Mн ,
где J — момент инерции вращающихся масс электродвигателя и сочлененного с ним производственного механизма; Mн — тормозной момент, создаваемый нагрузкой.
Из (8.95) определяем ток якоря
ia = [2πJ/(60смФ)] dn/dt + Мн /(смФ).
Подставляя его значение в (8.94), получаем
U = сеФn + [2πJΣRа/(60смФ)] dn/dt + Мн ΣRа /(смФ) + [La2πJ/(60смФ)] d2n/dt 2
TaTм d2n/dt 2 + Tм dn/dt + n = п0 — Δпн = пн ,
где n0 = U/сеФ — частота вращения при идеальном холостом ходе; Δnн = МнΣRа/(смсеФ 2 ) = IнΣRа /(сеФ) — уменьшение частоты вращения при переходе от холостого хода к нагрузке; nн = n0 — Δnн — установившаяся частота вращения; Tм = 2πJΣRа /(60 см сеФ 2 ) — электромеханическая постоянная времени; Та = La /ΣRа — электромагнитная постоянная времени; значения Tм и Та определяют скорость протекания переходного процесса. Аналогичное уравнение можно получить для изменения тока якоря ia . Для этого достаточно проинтегрировать уравнение (8.96), подставить найденное значение и в (8.97), а затем для исключения интеграла ∫ idt продифференцировать полученное выражение. В результате будем иметь
TaTм d2ia /dt 2 + Tм d2ia /dt + ia = Iн ,
где Iн = Мн /смФ — установившийся ток якоря после окончания переходного процесса.
Решая дифференциальные уравнения (8.98) и (8.99) при начальных условиях — при t = 0 n(0) = 0 и ia (0) = Iн, получаем
n = nн[1 +
(p2ep1 t — p1ep2 t ]
ia = Iн + [(Iнач — Iн )/√1 — 4Ta /Tм ] (еp1 t — еp2 t),
где Iнач = U/ΣRа — начальный пусковой ток; p1 и р2 — корни характеристического уравнения
р 2 + р/Ta + 1/(Тм Та ) = 0;
Из (8.102) и (8.103) следует, что характер переходного процесса зависит от вида корней p1 и р2характеристического уравнения. При действительных корнях (Tм > 4Ta) происходит апериодический процесс изменения ia и n. Сначала ток ia возрастает (рис. 8.64, а) согласно уравнению
ia = Iнач (1- е — t / Ta ).
Затем по истечении времени tз якорь двигателя начинает вращаться, частота вращения nвозрастает и возникающая в обмотке якоря ЭДС стремится уменьшить ток ia. Время запаздывания tз можно определить путем подстановки в (8.104) значения тока ia = Iн , соответствующего данному моменту нагрузки Mн :
В действительности время tз несколько больше значения, полученного по формуле (8.105) из-за тормозящего действия вихревых токов, возникающих в массивных частях магнитопровода машины.
Максимальное значение тока якоря можно определить, продифференцировав выражение (8.101) и приравняв полученное выражение нулю.

Рис. 8.64. Графики изменения частоты вращения и тока якоря при прямом пуске двигателя с параллельным возбуждением
Пунктиром на рис. 8.64, а показано, как возрастает ток ia, если якорь не сможет прийти во вращение. В большинстве случаев время протекания электромагнитных переходных процессов гораздо меньше чем механических; в этом случае можно принять Та = 0. При этом получим следующие уравнения, характеризующие изменение n и ia при пуске двигателя:
n = nн(1 — е-t/Tм);
ia = (Iнач— Iн )е — t / T м + Iн.
На рис. 8.64,б приведены построенные по этим уравнениям зависимости n и ia. Время переходного процесса при пуске принимается равным (3 ÷ 4) Tм. За это время частота вращения nдостигает (0,95 —0,98) от установившегося значения пн, а ток якоря Iа также приближается к установившемуся значению.
Реостатный пуск. Этот способ получил наибольшее применение. В начальный момент пуска при n = 0 ток Iп = U/(ΣRа + Rп ). Максимальное сопротивление пускового реостата Rп под-бирается так, чтобы для машин большой и средней мощности ток якоря при пуске Iп = (1,4 ÷ 1,8) Iном , а для машин малой мощности Iп = (2 ÷ 2,5) Iном .
Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением.В начальный период пуск осуществляется по реостатной характеристике б (рис. 8.65,а), соответствующей максимальному значению сопротивления Rп пускового реостата; при этом двигатель развивает максимальный пусковой момент Мпmах . Регулировочный реостат Rр.в в этом случае выводится так, чтобы ток возбуждения Iв и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения возрастает ЭДСЕ и уменьшается ток якоря Iа = (U — E)/(ΣRa + Rп ). При достижении некоторого значения Мпminчасть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает доМпmах . При этом двигатель переходит на работу по реостатной характеристике 5 и разгоняется до значения Мпmin .
Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 6, 5, 4, 3 и 2 (см. жирные линии на рис. 8.65,а) до выхода на естественную характеристику 1. Средний вращающий момент при пуске Мп.ср = 0,5 (Мпmах + Мпmin ) = const, вследствие чего двигатель разгоняется с некоторым постоянным ускорением. Таким же способом пускается в ход двигатель с последовательным возбуждением (рис. 8.65,б). Количество ступеней пускового реостата зависит от жесткости естественной характеристики и требований, предъявляемых к плавности пуска (допустимой разности Мпmах — Мпmin ). Пусковые реостаты рассчитывают на кратковременную работу под током.

Рис. 8.65. Графики изменения частоты вращения, момента и тока якоря при реостатном пуске двигателя с параллельным и последовательным возбуждением
При выводе отдельных ступеней пускового реостата ток якоря Iа достигает некоторого максимального значения (рис. 8.65,в), а затем уменьшается до минимального значения. В соответствии с изменением тока якоря изменяется и электромагнитный момент М. Заштрихованная на рис. 8.65,в область соответствует значениям динамического момента Мдин = М — Мн, обеспечивающего разгон двигателя до установившейся частоты вращения.
Пуск путем плавного повышения питающего напряжения. При реостатном пуске возникают довольно значительные погери энергии в пусковом реостате. Этот недостаток можно устранить, если пуск двигателя осуществить путем плавного повышения напряжения, подаваемого на его обмотку. Однако для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Такой источник используют также для регулирования частоты вращения двигателя (см. § 8.12).
Двигатель с параллельным возбуждением
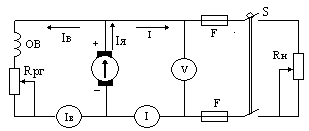
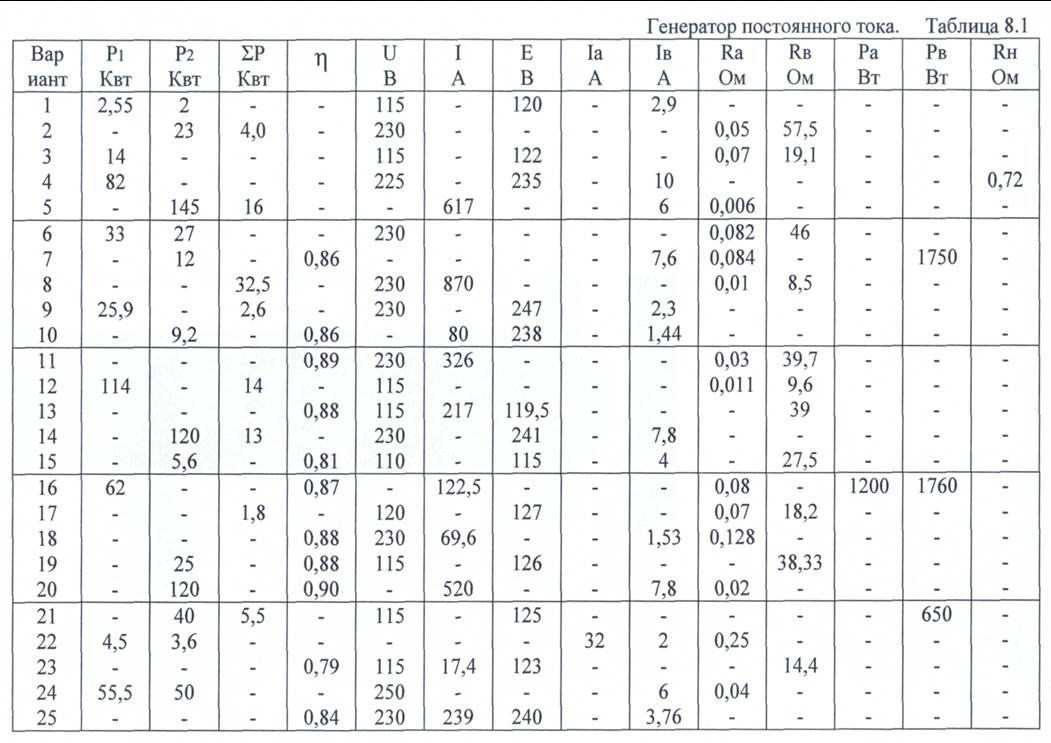
Пример 6.1. Генератор постоянного тока с параллельным возбуждением развивает номинальное напряжение Uн =220 В. Генератор нагружен на нагрузку Rн = 2,2 Ом. Сопротивление обмотки якоря Rя = 0,2 Ом, обмотки возбуждения Rв =220 Ом. КПД генератора η = 0,87. Определить следующие величины:
1.ток нагрузки; 2. ток якоря; 3. ток возбуждения; 4. эдс генератора;
5.полезную мощность; 6. потребляемую мощность; 7. суммарные потери в генераторе; 8. потери в обмотке якоря; 9. потери в обмотке возбуждения.
3.Ток якоря: Iя = I – Iв = 100 – 1= 99 А.
Е = U+ Iя ∙Rя = 220 + 99∙0,1 = 229,9 В.
Р2 = Uн∙I = 220∙100 = 22000 Вт = 22 кВт.

7.Суммарные потери в генераторе:
ΣР = Р1– Р2 = 25,87 – 22 = 3,87 кВт.
8.Потери в обмотке якоря:
Ря = Iя 2 ∙Rя = 99 2 ∙0,2 = 1960,2 Вт.
9.Потери в обмотке возбуждения:
Рв = Uн∙Iв = 220∙1 = 220 Вт.
Ответ: I = 100А; Iв = 1 А; Iя = 99 А; Е = 229,9 В; Р2 = 22 кВт;
Р1 = 25,87 кВт; ΣР = 3,87 кВт; Ря = 1960,2 Вт; Рв = 220 Вт.
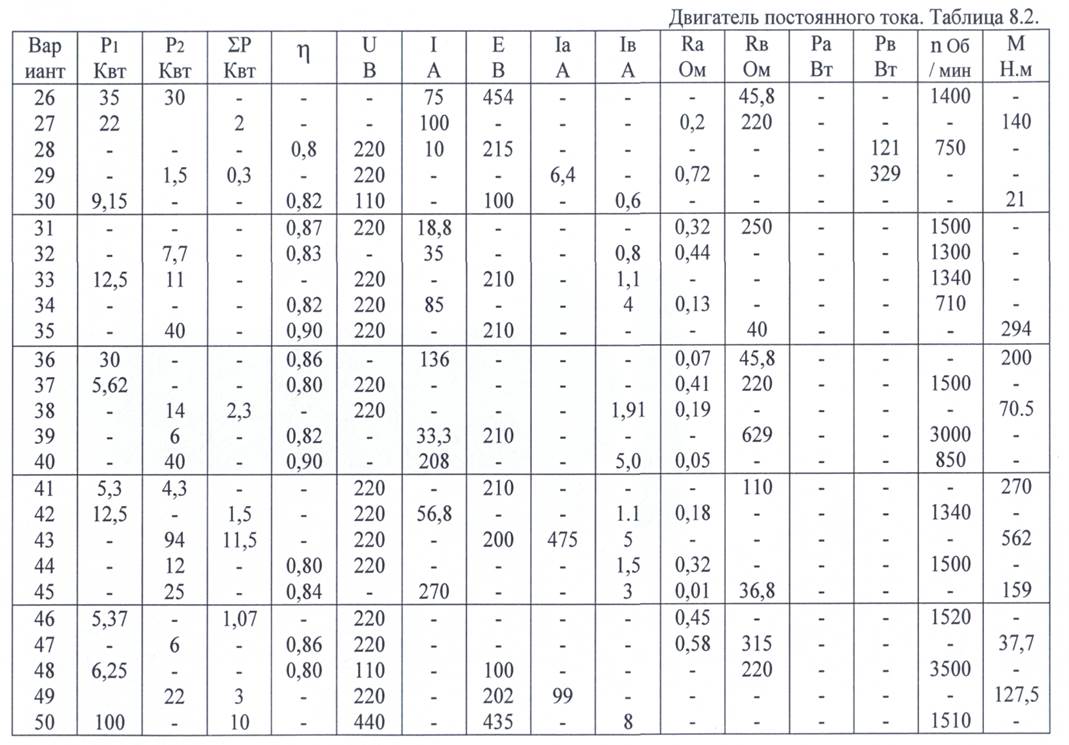
Пример 6.2. Рис.8.2.Двигатель постоянного токапараллельного возбуждения работает от сети Uн = 220 В. Частота вращения якоря n2 = 1450 об/мин. Ток двигателя I = 500 А, противо–эдс якоря Е = 202 В, сопротивление обмотки возбуждения Rв = 44 Ом. Кпд двигателя
η = 0,88. Определить:1.ток возбуждения; 2.ток якоря; 3. сопротивление обмотки якоря; 4.потребляемую мощность; 5.полезную мощность на валу; 6 Суммарные потери в двигателе; 7.потери в обмотке якоря; 8.потери в обмотке якоря; 9.вращающий момент на валу.
1. Ток возбуждения:
Iя = I – Iв = 500 –5 = 495 А.
3. Сопротивление обмотки якоря:

4. Потребляемая мощность от сети:
Р1 = Uн∙I = 220 ∙500 = 110 000 Вт = 110 кВт.
5. Полезная мощность на валу:
Р2 = P1∙ η = 110 ∙ 0,87 = 95,7 кВт.
6. Суммарные потери в двигателе:
ΣР = Р1 – P2 = 110 – 95,7 = 14,3 кВт.
7. Потери в обмотке возбуждения:
Pв = Uн∙Iв = 220∙5 = 1100 Вт =1,1 кВт.
8. Потери в обмотке якоря:
Ря = Iя 2 ∙ Rя =495 2 ∙0,016 = 3920,4 Вт = 3,92 кВт.
9. Вращающий момент на валу:

Ответ: Iв = 5 А,Iя = 495 А, Rя = 0,016 Ом,Р1 = 110 кВт, Р2 = 95,7 кВт,
ΣР = 14,3 кВт, Pв = 1,1 кВт, Ря =3,92 кВт М = 630,7 Нм.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Прямо сейчас студенты читают про:
Объемно-планировочные решения зданий и сооружений 1. Требования, предъявляемые к зданиям. 2. Объемно-планировочные параметры зданий. 3. Отдельные элементы зданий. 4. Вертикальные и.
Действия машиниста при внезапном появлении белого огня на локомотивном светофоре в пути следования (ИДП, Приложение№1 п.3, Инструкция №889-01 г. п.5.2.) Если при движении по путям перегона или станции, оборудованным путевыми.
Понятие мышления, виды, операции и формы мышления Мышление – социально-обусловленный, неразрывно связанный с речью психический процесс поисков и открытия нового, т.
Основные разделы инструкций по охране труда, их содержание Основные разделы инструкции по охране труда и их содержание опре­.
Правила подачи блюд. Приступая к подаче заказа, официант должен помнить общие правила техники обслуживания и строго соблюдать принятую последовательность.