Чувствительность датчика

Эта характеристика определяется изготовителем датчика и позволяет оценить выходной сигнал, зная пределы изменения измеряемой величины, т.е. сделать выбор датчика для измерительной системы в соответствии с требованиями измерений.
Размерность «S» зависит от принципа работы датчика и природы измеряемой величины:
Ом/ 0 С для терморезистора, мкВ/ 0 С – для термопары (см. Вт -1 Гц 1/2 для обнаружительной способности фотоприемника.
Чувствительность датчика зависит от:
- физического принципа, лежащего в основе его работы;
- выбора материала датчика;
- размера датчика (часто);
- устройства датчика;
- измерительной схемы;
- температуры окружающей среды;
- величины или частоты напряжения питания;
- частоты изменения измеряемых величин.
При зависимости от величины напряжения питания; S (U п.) = S1Uп∆S/∆m. В этом случае указывается значение чувствительности на 1 В напряжения питания. Для датчиков, содержащих полупроводниковые элементы большое влияние на чувствительность оказывает температура. Поэтому, определяя чувствительность таких датчиков всегда указывают температуру при которой проведено измерение и коэффициент изменения чувствительности от температуры (коэффициент преобразования). Для термотранзистора AGP коэффициент преобразования К = 156 при 24 0 С, а dK/dT = -2,3∙10 -3 / 0 С. Для PbS ∆E = 0,4 эВ при 295 и dЕ/dT = 4,5∙10 -4 эВ/К. Большое влияние на чувствительность оказывает частота изменения измерительной величины (чем > f, тем > может быть влияние). Это связано обычно с механической, тепловой и электрической инерцией датчика или устройства связанного с ним, которое мешает мгновенному следованию сигнала за измеряемой величиной. Наиболее часто это связано с элементами электрической схемы (R, C, L), в которых происходят переходные процессы. Причинами могут быть физические принципы работы датчика. В зависимости от частоты изменения “m” различают статический режим работы и динамический. В первом случае “m” изменяется медленно, или оно постоянно (поток излучения, ускорение). Во втором случае “m” изменяется быстро (модулируемый поток излучения, ускорение, связанное с вибрациями). Некоторые датчики могут работать только в динамичном режиме (микрофон, пироэлектрический датчик). Чувствительность в статическом режиме определяется по наклону статической характеристики в рабочем диапазоне. Это связано обычно с механической, тепловой и электрической инерцией датчика или устройства, связанного с ним, которая мешает мгновенному следованию сигнала за измеряемой величиной. Наиболее часто это связано с такими элементами электрической схемы, как резисторы, конденсаторы, катушки индуктивности, в которых происходят переходные процессы. Причинами могут быть и физические принципы работы датчиков. Если эти процессы не постоянны, то чувствительность будет зависеть от рабочего диапазона. На линейном участке зависимости отношение S/m = Rj называется статическим коэффициентом преобразования. Динамичная чувствительность определяется, если “m” является периодической функцией времени. В этом случае S будет иметь ту же периодичность, что и “m”. Зависимость чувствительности в динамичном режиме от частоты изменения измеряемой величины, является частотной характеристикой датчика. При f → 0 чувствительность в динамичном режиме стремится к значению статической чувствительности. Если измеряемая величина описывается выражением m(t) = m0 + m1 cos t, где m0 – постоянная составляющая, на которую накладывается синусоидальная переменная с амплитудой m1 и частотой f = /2π, то выходной сигнал приобретает форму: S (t) = S0 + S1 cos (t + φ), где S1 амплитуда переменной составляющей выходного сигнала, возникающая от изменения измеряемой величины. φ – сдвиг фаз между изменениями S на входе и выходе. Связь между “S” и “m” в общей форме представляет собой дифференциальное уравнение, которое в зависимости от конкретного случая может быть уравнением 1 ого или 2 ого порядка. Зависимость S = f(t) называется амплитудно — частотной характеристикой (АЧХ). 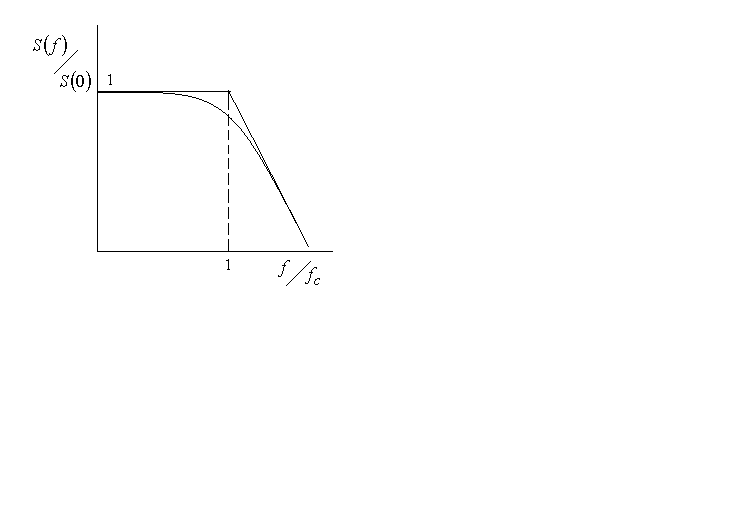 Для систем 1 ого порядка
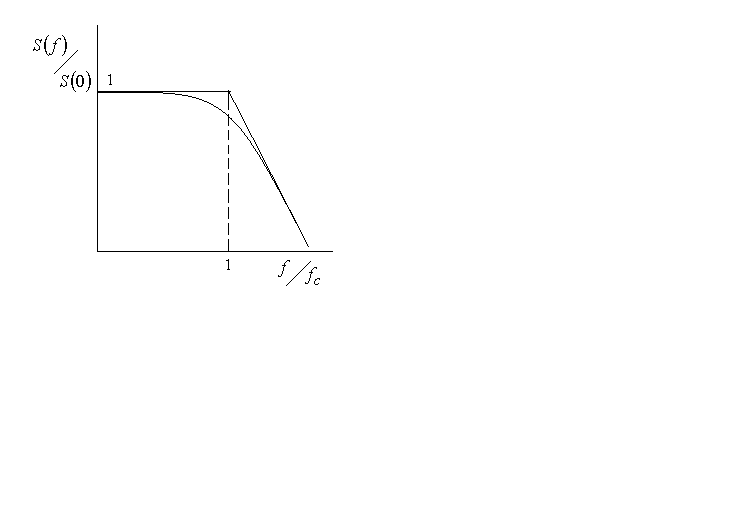
Для систем 1 ого порядка  при f → 0, Sf = S0, тоже при fc. Если f = fc, то
при f → 0, Sf = S0, тоже при fc. Если f = fc, то  . fc = B – называется полосой пропускания. Это диапазон частот, в котором ордината частотной характеристики уменьшается относительно своего максимального значения не больше, чем в 2 раза или на 3 дБ. Единица измерения 1 дБ это 0,1 десятичного логарифма отношения мощностей сигнала звуковой или электромагнитной природы. 3 дБ – это соответственно Sf/S0 = 0,3 (log2 = 0,3). Т.е. для систем первого порядка полоса пропускания B равна fc, где fc – некая граничная частота. Системами 2 ого порядка моделируются многие комбинированные датчики.
. fc = B – называется полосой пропускания. Это диапазон частот, в котором ордината частотной характеристики уменьшается относительно своего максимального значения не больше, чем в 2 раза или на 3 дБ. Единица измерения 1 дБ это 0,1 десятичного логарифма отношения мощностей сигнала звуковой или электромагнитной природы. 3 дБ – это соответственно Sf/S0 = 0,3 (log2 = 0,3). Т.е. для систем первого порядка полоса пропускания B равна fc, где fc – некая граничная частота. Системами 2 ого порядка моделируются многие комбинированные датчики.
Чувствительность датчика
Эта характеристика определяется изготовителем датчика и позволяет оценить выходной сигнал, зная пределы изменения измеряемой величины, т.е. сделать выбор датчика для измерительной системы в соответствии с требованиями измерений.
Размерность «S» зависит от принципа работы датчика и природы измеряемой величины:
Ом/ 0 С для терморезистора, мкВ/ 0 С – для термопары (см. Вт -1 Гц 1/2 для обнаружительной способности фотоприемника.
Чувствительность датчика зависит от:
- физического принципа, лежащего в основе его работы;
- выбора материала датчика;
- размера датчика (часто);
- устройства датчика;
- измерительной схемы;
- температуры окружающей среды;
- величины или частоты напряжения питания;
- частоты изменения измеряемых величин.
При зависимости от величины напряжения питания;
В этом случае указывается значение чувствительности на 1 В напряжения питания.
Для датчиков, содержащих полупроводниковые элементы большое влияние на чувствительность оказывает температура. Поэтому, определяя чувствительность таких датчиков всегда указывают температуру при которой проведено измерение и коэффициент изменения чувствительности от температуры (коэффициент преобразования).
Для термотранзистора AGP коэффициент преобразования К = 156 при 24 0 С, а dK/dT = -2,3∙10 -3 / 0 С.
Для PbS ∆E = 0,4 эВ при 295 и dЕ/dT = 4,5∙10 -4 эВ/К.
Большое влияние на чувствительность оказывает частота изменения измерительной величины (чем > f, тем > может быть влияние). Это связано обычно с механической, тепловой и электрической инерцией датчика или устройства связанного с ним, которое мешает мгновенному следованию сигнала за измеряемой величиной. Наиболее часто это связано с элементами электрической схемы (R, C, L), в которых происходят переходные процессы. Причинами могут быть физические принципы работы датчика.
В зависимости от частоты изменения “m” различают статический режим работы и динамический.
В первом случае “m” изменяется медленно, или оно постоянно (поток излучения, ускорение).
Во втором случае “m” изменяется быстро (модулируемый поток излучения, ускорение, связанное с вибрациями).
Некоторые датчики могут работать только в динамичном режиме (микрофон, пироэлектрический датчик).
Чувствительность в статическом режиме определяется по наклону статической характеристики в рабочем диапазоне.
Это связано обычно с механической, тепловой и электрической инерцией датчика или устройства, связанного с ним, которая мешает мгновенному следованию сигнала за измеряемой величиной. Наиболее часто это связано с такими элементами электрической схемы, как резисторы, конденсаторы, катушки индуктивности, в которых происходят переходные процессы. Причинами могут быть и физические принципы работы датчиков.
Если эти процессы не постоянны, то чувствительность будет зависеть от рабочего диапазона. На линейном участке зависимости отношение S/m = Rj называется статическим коэффициентом преобразования.
Динамичная чувствительность определяется, если “m” является периодической функцией времени. В этом случае S будет иметь ту же периодичность, что и “m”. Зависимость чувствительности в динамичном режиме от частоты изменения измеряемой величины, является частотной характеристикой датчика.
При f → 0 чувствительность в динамичном режиме стремится к значению статической чувствительности.
Если измеряемая величина описывается выражением
где m0 – постоянная составляющая, на которую накладывается синусоидальная переменная с амплитудой m1 и частотой f = /2π, то выходной сигнал приобретает форму:
где S1 амплитуда переменной составляющей выходного сигнала, возникающая от изменения измеряемой величины.
φ – сдвиг фаз между изменениями S на входе и выходе.
Связь между “S” и “m” в общей форме представляет собой дифференциальное уравнение, которое в зависимости от конкретного случая может быть уравнением 1 ого или 2 ого порядка.
Зависимость S = f(t) называется амплитудно — частотной характеристикой (АЧХ).
Для систем 1 ого порядка при f → 0, Sf = S0, тоже при fc. Если f = fc, то .
fc = B – называется полосой пропускания. Это диапазон частот, в котором ордината частотной характеристики уменьшается относительно своего максимального значения не больше, чем в 2 раза или на 3 дБ. Единица измерения 1 дБ это 0,1 десятичного логарифма отношения мощностей сигнала звуковой или электромагнитной природы. 3 дБ – это соответственно Sf/S0 = 0,3 (log2 = 0,3).
Т.е. для систем первого порядка полоса пропускания B равна fc, где fc – некая граничная частота.
Системами 2 ого порядка моделируются многие комбинированные датчики.
Чувствительность датчиков
Важной характеристикой любого датчика является его чувствительность, определяющая способность датчика реагировать на изменение входной величины. Количественно чувствительность S определяется отношением изменения выходной величины ДА^ к приращению АХвх входной величины, вызвавшему это изменение

В геометрическом смысле чувствительность — это тангенс угла наклона касательной в данной точке к оси абсцисс; в физическом смысле — это скорость изменения выходной величины в данной точке (применительно к графической интерпретации — крутизна характеристики).
При постоянной чувствительности (S = const) характеристика датчика линейна и имеет вид АвЬ1Х = S-XBX. Если зависимость между выходной и входной величинами нелинейна, то чувствительность не сохраняет постоянства своего значения во всем диапазоне измерения. Для линейных датчиков чувствительность является постоянной величиной.
На рис. 2.3 приведены два примера: верхние графики соответствуют изменению АвЬ|Х, а нижние — изменению чувствительности S.

Рис. 2.3. Графики изменения чувствительности нелинейных (а) и линейных (б) датчиков
Левые графики (а) иллюстрируют изменение чувствительности для датчика с нелинейной статической характеристикой, правые (б) — с линейной.
Общая чувствительность последовательно соединенных п элементов определяется произведением чувствительности каждого из элементов, т.е. S — S ? Sr—S„. Чувствительность датчика должна быть достаточно высокой, чтобы реагировать на входное воздействие, но и не настолько большой, чтобы на результатах измерений сказывались сигналы помех.
Наименьшее значение входной величины, которое вызывает появление сигнала на выходе (т.е. которое прибор способен различить), называется порогом чувствительности.
Если, например, самое незначительное увеличение измеряемого напряжения, которое вызывает перемещение стрелки вольтметра, составляет 1 В, то порог чувствительности равен 1 В. Значения, меньшие порога чувствительности определяют зону нечувствительности прибора. В принципе, зоны нечувствительности иногда могут находиться и на некоторых участках статической характеристики (например, см. рис. 2.1, б, нижняя кривая).
5.2. Основные характеристики датчиков
Датчик в определенных условиях эксплуатации подвергается воздействию не только измеряемой величины, но и других физических величин, именуемых влияющими, к которым чувствителен датчик.
В идеальном случае имеет место связь

,
а фактически имеет место

, (5.3)
где m – измеряемая величина;
gi – величины, влияющие на датчик.
Для уменьшения погрешности датчиков, очевидно, необходимо:
- снизить значения влияющих величин gi путем соответствующей защиты датчика;
- стабилизировать влияющие величины gi и градуировать датчик с учетом этих величин.
Случайные ошибки измерений приводят к разбросу результатов при повторении измерений. Статистическая обработка результатов позволяет определить наиболее вероятные значения измеряемой величины и оценить пределы его погрешности. Статистическую обработку осуществляют по выражениям: — среднее значение измеряемой величины 
 ; (5.4)
; (5.4)
- разброс результатов, выраженный через его среднеквадратическое отклонение (СКО)
 , (5.5) где n — количество измерений. Вероятность нахождения случайно измеряемой величины m в некотором диапазоне изменения находится по выражению
, (5.5) где n — количество измерений. Вероятность нахождения случайно измеряемой величины m в некотором диапазоне изменения находится по выражению  , (5.6) где
, (5.6) где  — плотность распределения величины (плотность вероятности). В случае нормального закона распределения [4] плотность определяется по зависимости:
— плотность распределения величины (плотность вероятности). В случае нормального закона распределения [4] плотность определяется по зависимости:  . (5.7) Наиболее вероятная величина m равна
. (5.7) Наиболее вероятная величина m равна  , а вероятность появления результатов измерения в указанных ниже пределах равна:
, а вероятность появления результатов измерения в указанных ниже пределах равна:  (5.8) Очевидно, чем меньше СКО
(5.8) Очевидно, чем меньше СКО  , тем выше сходимость результатов, а отсюда можно ограничиться и меньшим количеством измерений величиныm.
, тем выше сходимость результатов, а отсюда можно ограничиться и меньшим количеством измерений величиныm.
5.2.2. Чувствительность датчиков
Чувствительность датчика S является определяющим параметром при выборе датчика. Чувствительность определяется по зависимости:  , (5.9) где
, (5.9) где  — вариации сигнала на выходе датчика;
— вариации сигнала на выходе датчика;  — изменение измеряемой величины;
— изменение измеряемой величины;  — некоторое значение измеряемой величины, вблизи которого производится измерение. Единицы измерения зависят от принципа работы датчика и природы измеряемой величины. Например, для терморезистора размерностью является [Ом / 0 С], а для термопары — [мкВ / 0 С]. В зависимости от частоты изменений измеряемой величины существует два режима работы датчиков:
— некоторое значение измеряемой величины, вблизи которого производится измерение. Единицы измерения зависят от принципа работы датчика и природы измеряемой величины. Например, для терморезистора размерностью является [Ом / 0 С], а для термопары — [мкВ / 0 С]. В зависимости от частоты изменений измеряемой величины существует два режима работы датчиков:
- статический, если измеряемая величина постоянная или меняется медленно;
- динамический, если измеряемая величина меняется быстро.
Отношение величины на выходе  к соответствующей измеряемой величине
к соответствующей измеряемой величине называютстатическим коэффициентом преобразования
называютстатическим коэффициентом преобразования  , (5.10) где
, (5.10) где  — рабочая точка. Это отношение
— рабочая точка. Это отношение  не зависит от рабочей точки и совпадает с чувствительностью
не зависит от рабочей точки и совпадает с чувствительностью  только в том случае, когда статическая характеристика является прямой, проходящей через начало координат. В наиболее общей форме связь между величинами
только в том случае, когда статическая характеристика является прямой, проходящей через начало координат. В наиболее общей форме связь между величинами  и
и представляют собойдифференциальные уравнения. Зависимость чувствительности в динамическом режиме от частоты f, т.е.
представляют собойдифференциальные уравнения. Зависимость чувствительности в динамическом режиме от частоты f, т.е.  , являетсячастотной характеристикой датчика. Частотные характеристики связаны с порядком дифференциального уравнения, описывающего работу датчика. Частотная характеристика датчика первого порядка Такой датчик описывается дифференциальным уравнением вида
, являетсячастотной характеристикой датчика. Частотные характеристики связаны с порядком дифференциального уравнения, описывающего работу датчика. Частотная характеристика датчика первого порядка Такой датчик описывается дифференциальным уравнением вида  , (5.11) где A,B – постоянные коэффициенты. Если измеряемая величина
, (5.11) где A,B – постоянные коэффициенты. Если измеряемая величина  меняется по гармоническому закону вида
меняется по гармоническому закону вида  , (5.12) где
, (5.12) где  — амплитуда величины, а
— амплитуда величины, а — круговая частота, то выходная величина датчика
— круговая частота, то выходная величина датчика может быть определена по зависимости
может быть определена по зависимости  , (5.13) где
, (5.13) где  — амплитуда выходной величины датчика,
— амплитуда выходной величины датчика, — сдвиг фазы выходного сигнала датчика относительно входного. В
— сдвиг фазы выходного сигнала датчика относительно входного. В комплексной форме вместо выражений(5.12) и (5.13) соответственно имеем:
комплексной форме вместо выражений(5.12) и (5.13) соответственно имеем:  , (5.14)
, (5.14)  . (5.15) Частотная характеристика датчика второго порядка В этом случае датчик описывается дифференциальным уравнением вида
. (5.15) Частотная характеристика датчика второго порядка В этом случае датчик описывается дифференциальным уравнением вида  , (5.16) где A,B , С – постоянные коэффициенты. Как пример в качестве такого датчика рассмотрим акселерометр, который служит для определения ускорений движения объекта. Схема акселерометра представлена на рисунке 5.7, где M,R — масса и пружина. Эта система помещена в корпус, в котором находится датчик положения и схема вывода наружу электрического сигнала, регистрирующего движение чувствительной массы относительно продольной оси корпуса. Введем обозначения: h0 – координата некоторой точки «а» корпуса; h – текущее положение точки b массы, выбранной так, что положению покоя соответствует h= h0; F — коэффициент силы вязкого трения, пропорциональной перемещению массы относительно корпуса; C – коэффициент восстанавливающей силы пружины, пропорциональной перемещению массы M относительно корпуса. Уравнение движения массы в общем виде можно записать
, (5.16) где A,B , С – постоянные коэффициенты. Как пример в качестве такого датчика рассмотрим акселерометр, который служит для определения ускорений движения объекта. Схема акселерометра представлена на рисунке 5.7, где M,R — масса и пружина. Эта система помещена в корпус, в котором находится датчик положения и схема вывода наружу электрического сигнала, регистрирующего движение чувствительной массы относительно продольной оси корпуса. Введем обозначения: h0 – координата некоторой точки «а» корпуса; h – текущее положение точки b массы, выбранной так, что положению покоя соответствует h= h0; F — коэффициент силы вязкого трения, пропорциональной перемещению массы относительно корпуса; C – коэффициент восстанавливающей силы пружины, пропорциональной перемещению массы M относительно корпуса. Уравнение движения массы в общем виде можно записать  . (5.17) Вторичный преобразователь чувствителен только к относительному перемещению
. (5.17) Вторичный преобразователь чувствителен только к относительному перемещению  . Тогда уравнение (5.17) можно переписать
. Тогда уравнение (5.17) можно переписать  , (5.18) где
, (5.18) где  — ускорение массы, направленное вдоль оси акселерометра. Очевидно, что при
— ускорение массы, направленное вдоль оси акселерометра. Очевидно, что при  в установившемся режиме имеет место
в установившемся режиме имеет место , (5.18) т.е. перемещение массы пропорционально ее ускорению.
, (5.18) т.е. перемещение массы пропорционально ее ускорению.