6.2. Потери энергии в электродвигателях постоянного и переменного тока
Потери в двигателе складываются из переменных, зависящих от нагрузки, и постоянных потерь, не зависящих от нагрузки.
Для электропривода постоянного тока суммарные потери мощности равны:

,

где — постоянные потери,

— соответственно потери на возбуждение, потери в стали и механические;

потери в силовой (якорной) цепи двигателя.
Аналогично для асинхронного двигателя

.

Переменные потери могут быть выражены также через электромагнитный момент и относительную скорость (или скольжение), а именно:
1) для двигателя постоянного тока независимого возбуждения

,

где — электромагнитная мощность;
 — соответственно перепад угловой скорости, обусловленный моментом
— соответственно перепад угловой скорости, обусловленный моментом  , и угловая скорость идеального холостого хода;
, и угловая скорость идеального холостого хода;
2) для асинхронного двигателя

.
6.3. Нагрев и охлаждение двигателя. Классификация режимов работы электроприводов
Потери энергии в двигателе вызывают нагрев его отдельных частей. Допустимый нагрев двигателя определяется нагревостойкостью применяемых изоляционных материалов. Чем больше нагревостойкость, тем при той же мощности меньше размеры двигателя или при тех же размерах можно увеличить его мощность. Кроме того лучшему использованию двигателя способствует также более совершенная система его охлаждения.
Изоляционные материалы, применяемые при изготовлении электрических машин, делятся на следующие основные классы нагревостойкости.
Изоляция класса А. К этому классу относятся хлопчатобумажные ткани, пряжа, бумага, волокнистые материалы из целлюлозы и шелка, пропитанные или погруженные в жидкий диэлектрик. Допустимая предельная температура 105 °С.
Изоляция класса Е. Этот класс включает синтетические эмали (для изоляции проводов) на основе полиэфирных эпоксидных и подобных им смол, синтетические органические пленки и т. п. Допустимая предельная температура нагрева 120 °С.
Изоляция класса В. К этому классу относятся слюда, асбест, стеклянное волокно и другие неорганические материалы со связывающими материалами органического происхождения. Допустимая предельная температура нагрева 130 °С.
Изоляция класса F. Этот класс включает те же материалы, что и для класса В, но сочетающиеся с синтетическими связующими и пропитывающими составами, модифицированными кремнийорганическими соединениями. Допустимая предельная температура нагрева 155 °С.
Изоляция класса Н. К этому классу относятсяте же материалы, что и для класса В, но в сочетании с кремнийорганическими связующими и пропитывающими составами. Допустимая предельная температура 180 °С.
Изоляция класса С.. Этот класс включает слюду, керамические материалы, стекло, кварц, применяемые с неорганическими связующими составами или без связующих составов. Допустимая предельная температура более 180 °С.
Соблюдение установленных ограничений по допустимой температуре нагрева обеспечивает срок службы изоляции электрических машин 15—20 лет. Превышение допустимых температур ведет к разрушению изоляции обмоток и к сокращению срока эксплуатации двигателя. Так, для изоляции класса А превышение допустимой температуры нагрева на 8—10 °С сокращает срок службы изоляции вдвое.
Предельные температуры обмоток двигателей с изоляцией различных классов достигаются при номинальной нагрузке и температуре окружающей (охлаждающей) среды  и при высоте над уровнем моря до 1000 м. При температуре меньше
и при высоте над уровнем моря до 1000 м. При температуре меньше двигатель может быть нагружен несколько выше номинальной нагрузки. При большей температуре окружающей среды и высоте над уровнем моря выше 1000 м нагрузка двигателя должна быть снижена относительно номинального значения.
двигатель может быть нагружен несколько выше номинальной нагрузки. При большей температуре окружающей среды и высоте над уровнем моря выше 1000 м нагрузка двигателя должна быть снижена относительно номинального значения.
Условия нагрева отдельных частей машины различны. Большему нагреву подвергаются части обмоток, расположенные во внутренних областях машины. Так же неодинаково и выделение теплоты в различных режимах работы, и поэтому направление тепловых потоков внутри машины непостоянно. Эти обстоятельства весьма усложняют тепловые расчеты, и поэтому без соответствующих упрощений получить аналитические выражения для них невозможно.
Обычно исследование тепловых процессов в двигателях производится со следующими допущениями:
1) двигатель рассматривается как однородное тело, обладающее бесконечно большой теплопроводностью, с одинаковой температурой во всех точках выделения теплоты и точках, соприкасающихся с окружающей средой;
2) теплоотдача во внешнюю среду пропорциональна первой степени разности температур двигателя и окружающей среды;
3) температура охлаждающей среды постоянна;
4) теплоемкость двигателя, мощность тепловых потерь и теплоотдача не зависят от температуры двигателя.
При принятых допущениях и неизменной нагрузке уравнение теплового баланса двигателя имеет вид:

,
где  — количество теплоты (мощность потерь в двигателе), выделяемое двигателем в единицу времени,
— количество теплоты (мощность потерь в двигателе), выделяемое двигателем в единицу времени, ;
;
 —теплоотдача двигателя — количество теплоты, отдаваемой двигателем в охлаждающую среду в единицу времени при разности температур в
—теплоотдача двигателя — количество теплоты, отдаваемой двигателем в охлаждающую среду в единицу времени при разности температур в  ,
, ;
;
 —превышение температуры двигателя над температурой охлаждающей среды,
—превышение температуры двигателя над температурой охлаждающей среды, 

;

где — соответственно температура двигателя и охлаждающей среды;
 — теплоемкость двигателя — количество теплоты, необходимое для повышения температуры двигателя на
— теплоемкость двигателя — количество теплоты, необходимое для повышения температуры двигателя на  , Дж/°С.
, Дж/°С.

Разделив члены уравнения (6.5) на , получим:


,
где  — постоянная времени нагрева двигателя — время, в течение которого превышение температуры от
— постоянная времени нагрева двигателя — время, в течение которого превышение температуры от достигло бы установившегося значения
достигло бы установившегося значения при
при и отсутствии теплоотдачи в охлаждающую среду
и отсутствии теплоотдачи в охлаждающую среду .
.
Решение уравнения (6.8) дает


где — соответственно конечное (установившееся) и начальное значения превышения температуры двигателя над температурой окружающей среды


Если , то (6.10) принимает вид


Согласно (6.9) и (6.11) на рис. 6.2 построены кривые нагрева двигателя соответственно для  (кривая 1) и
(кривая 1) и (кривая 2) при одной и той же нагрузке (
(кривая 2) при одной и той же нагрузке ( )
)

За время превышение температуры двигателя достигает значения

Рис. 6.2. Кривые нагрева двигателя
Как следует из (6.9) или (6.11), время нагрева двигателя до установившейся температуры равно бесконечности. Практически нагрев двигателя можно считать законченным, когда превышение температуры его достигнет значения  соответственно через время от начала нагрева, равное
соответственно через время от начала нагрева, равное .
.

Различные условия работы производственных механизмов обусловливают различные режимы работы электроприводов, которые классифицируются на 8 режимов работы (). Эти режимы можно объединить в три группы:
1. Длительный режим (первая группа). Режим работы электропривода называется длительным, если его продолжительность настолько велика, что все части электродвигателя за время работы достигают установившихся значений (рис. 6.3, а).
2. Кратковременный режим работы (вторая группа). Режим работы называется кратковременным, если длительность рабочего периода недостаточна для того, чтобы электродвигатель достиг установившегося перегрева, а периоды остановки настолько длительны, что все его части охлаждаются до температуры окружающей среды (рис.6.3, б). В этом режиме стандартные продолжительности рабочего периода:10, 30, 60 и 90 мин.
3. Повторно-кратковременный режим (третья группа). Режим работы называется повторно-кратковременным в том случае, когда периоды работы привода чередуются с его отключениями. При этом продолжительность рабочего периода настолько мала, что электродвигатель не успевает достигнуть установившейся температуры, а за время последующей паузы не успевает охладиться до температуры окружающей среды (рис. 6.3, в).

В этом режиме работы продолжительность цикла не превышает 10 мин, и режим характеризуется относительной продолжительностью включения, которая определяется по формуле

Условия нагревания двигателя в каждом из перечисленных режимов различны, и поэтому необходимы не только различные методы определения мощности, но и для каждого из режимов применять двигатели специального назначения.

Рис. 6.3. Зависимости мощности  на валу двигателя, мощности потерь
на валу двигателя, мощности потерь и температуры
и температуры от времени при длительном (а), кратковременном (б) и повторно-кратковременном (в) режимах
от времени при длительном (а), кратковременном (б) и повторно-кратковременном (в) режимах
Потери мощности и кпд машин постоянного тока
Преобразование электрической энергии в механическую с помощью двигателей и механической в электрическую с помощью генераторов сопровождается потерями энергии, чему соответствуют определенные потери мощности. От значений потерь мощности зависит важнейший энергетический показатель машин постоянного тока — их КПД. Потери мощности в машинах приводят к их нагреванию.
В машинах постоянного тока различают следующие основные виды потерь мощности:
- Потери мощности в сопротивлениях цепи якоря: ΔРя = Iя 2 rя. Как видно, потери мощности ΔРя зависят от нагрузки машины. Поэтому их называют переменными потерями мощности.
- Потери мощности в стали ΔРc, вызванные главным образом вихревыми токами и перемагничиванием магнитопровода якоря при его вращении. Частично эти потери возникают из-за вихревых токов в поверхностном слое полюсных наконечников, вызванных пульсацией магнитного потока при вращении якоря.
- Механические потери мощности ΔРмех , причиной которых является трение в подшипниках, щеток о коллектор, вращающихся частей о воздух.
- Потери мощности в цепи параллельной или независимой обмотки возбуждения: ΔРв = UвIв= Iв 2 rв.
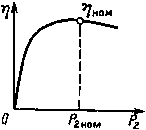
Потери ΔРс, ΔРмех , ΔРв при изменении нагрузки машин меняются незначительно, вследствие чего их называют постоянными потерями мощности. КПД машин постоянного тока η = P2/P1, где Р2 — полезная мощность машины (у генератора — это электрическая мощность, отдаваемая приемнику, у двигателя — механическая мощность на валу); Р1 — подводимая к машине мощность (у генератора — это механическая мощность, сообщаемая ему первичным двигателем, у двигателя — мощность, потребляемая им от источника постоянного тока; если генератор имеет независимое возбуждение, то P1 включает в себя также мощность, необходимую для питания цепи обмотки возбуждения). Рис. 9.36. Зависимость КПД машин постоянного тока от полезной мощности Очевидно, мощность Р1 может быть выражена следующим образом:Р1 = Р2+ ΣΔP, где ΔP — сумма перечисленных выше потерь мощности. С учетом последнею выражения η = P2/(P2 + ΣΔP). Когда машина работает вхолостую, полезная мощность Р2 равна нулю и η = 0. Характер изменения КПД при увеличении полезной мощности зависит от значения и характера изменения потерь мощности. Примерный график зависимости η (Р2) приведен на рис. 9.36. При увеличении полезной мощности КПД сначала возрастает при некотором значении Р2, достигает наибольшего значения, а затем уменьшается. Последнее объясняется значительным увеличением переменных потерь, пропорциональных квадрату тока. Машины рассчитывают обычно таким образом, чтобы наибольшее значение КПД находилось в области, близкой к номинальной мощности Р2ном . Номинальное значение КПД машин мощностью от 1 до 100 кВт лежит примерно в пределах от 0,74 до 0,92 соответственно.
Асинхронные машины устройство асинхронного двигателя трехфазного тока
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в механическую. Благодаря простоте устройства, высокой надежности в эксплуатации и меньшей стоимости по сравнению с другими двигателями асинхронные двигатели трехфазного тока нашли широкое применение в промышленности и сельском хозяйстве. С их помощью приводятся в движение металлорежущие и деревообрабатывающие станки, подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы и другие механизмы. На рис. 10.1 изображен продольный (а) и поперечный (б) разрезы асинхронного двигателя трехфазного тока, а также части сердечников ротора и статора с пазами и обмотками (в). Двигатель имеет две основные части: неподвижную — статор и вращающуюся — ротор. Статор состоит из корпуса 1, представляющего собой основание всего двигателя. Он должен обладать достаточной механической прочностью и выполняется из стали, чугуна или алюминия. С помощью лап 8 двигатель крепится к фундаменту или непосредственно к станине производственного механизма. Существуют и другие способы крепления двигателя к производственному механизму. В корпус 1 вмонтирован сердечник 2 статора, представляющий собой полый цилиндр, на внутренней поверхности которого имеются пазы 3 с обмоткой статора 4. Часть обмотки 4′,находящаяся вне пазов 3, называется лобовой; она отогнута к торцам сердечника статора. Так как в сердечнике статора действует переменный магнитный поток и на статор действует момент, развиваемый двигателем, сердечник должен изготовляться из ферромагнитного материала достаточной механической прочности. Для уменьшения потерь от вихревых токов сердечник статора собирают из отдельных листов (толщиной 0,35 — 0,5 мм) электротехнической стали и каждый лист изолируют лаком или другим изоляционным материалом.  Рис 10.1 Продольный (а) и поперечный (б) разрезы асинхронного двигателя, части сердечников ротора и статора с пазами и обмоткой (в) Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже — из алюминиевого провода. В качестве изоляции проводов друг от друга используют бумагу, хлопчатобумажную ткань, пропитанные различными лаками, слюду, стекловолокно и различные эмали. Для изоляции проводов обмотки от сердечника статора служат электроизоляционный картон, слюда, асбест, стекловолокно. В последнее время для изоляции обмоток асинхронных двигателей низкого напряжения применяют лавсан с электроизоляционным картоном, для двигателей высокого напряжения — пленки на слюдяной основе. На рис. 10.2 изображены разрезы пазов с обмоткой статоров асинхронных двигателей низкого (а) и высокого (б) напряжения. Обозначения на рис. 10.2, а: 1 — провод с эмалевой изоляцией марки ПЭТВ-1; 2, 3 — пазовая и межсекционная изоляции из пленкоэлектрокартона на лавсане толщиной 0,27 мм. Обозначения на рис. 10.2, б:1 — провод медный; 2 — витковая изоляция из поликарбонатовой пленки; 3, 4— пазовая и межсекционная изоляции из слюдяной ленты на термореактивном лаке; 5 — клин из дерева твердых пород.
Рис 10.1 Продольный (а) и поперечный (б) разрезы асинхронного двигателя, части сердечников ротора и статора с пазами и обмоткой (в) Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже — из алюминиевого провода. В качестве изоляции проводов друг от друга используют бумагу, хлопчатобумажную ткань, пропитанные различными лаками, слюду, стекловолокно и различные эмали. Для изоляции проводов обмотки от сердечника статора служат электроизоляционный картон, слюда, асбест, стекловолокно. В последнее время для изоляции обмоток асинхронных двигателей низкого напряжения применяют лавсан с электроизоляционным картоном, для двигателей высокого напряжения — пленки на слюдяной основе. На рис. 10.2 изображены разрезы пазов с обмоткой статоров асинхронных двигателей низкого (а) и высокого (б) напряжения. Обозначения на рис. 10.2, а: 1 — провод с эмалевой изоляцией марки ПЭТВ-1; 2, 3 — пазовая и межсекционная изоляции из пленкоэлектрокартона на лавсане толщиной 0,27 мм. Обозначения на рис. 10.2, б:1 — провод медный; 2 — витковая изоляция из поликарбонатовой пленки; 3, 4— пазовая и межсекционная изоляции из слюдяной ленты на термореактивном лаке; 5 — клин из дерева твердых пород. 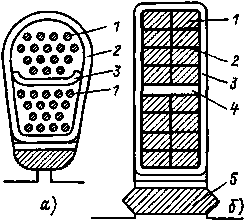 Рис. 10.2. Разрез паза с обмоткой статора асинхронного двигателя при номинальном напряжении до 500 В (а) и 6000 В (б) Обмотка статора состоит из трех отдельных частей, называемых фазами. Фазы могут быть соединены между собой звездой или треугольником. Начала обмоток будем обозначать на схемах буквами А, В, С,концы — X, Y, Z. Обмотки двигателей малой и средней мощности изготовляют на напряжения 380/220 и 220/127 В. Напряжение, указанное в числителе, соответствует соединению обмоток звездой, в знаменателе — треугольником. Таким образом, один и тот же двигатель при соответствующей схеме соединения его обмоток может быть включен в сеть на любое указанное в паспорте напряжение. Существуют двигатели на 500, 660 и 1140 В. Двигатели высокого напряжения изготовляют на напряжения 3000 и 6000 В. На корпусе двигателя имеется доска с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают буквами С1, С2 и С3, концы обмоток — соответственно С4, С5 и С6. Сердечник 5 ротора (см. рис. 10.1) представляет собой цилиндр, собранный, так же как и сердечник статора, из отдельных листов электротехнической стали, в котором имеются пазы 6 с обмоткой 7 ротора.
Рис. 10.2. Разрез паза с обмоткой статора асинхронного двигателя при номинальном напряжении до 500 В (а) и 6000 В (б) Обмотка статора состоит из трех отдельных частей, называемых фазами. Фазы могут быть соединены между собой звездой или треугольником. Начала обмоток будем обозначать на схемах буквами А, В, С,концы — X, Y, Z. Обмотки двигателей малой и средней мощности изготовляют на напряжения 380/220 и 220/127 В. Напряжение, указанное в числителе, соответствует соединению обмоток звездой, в знаменателе — треугольником. Таким образом, один и тот же двигатель при соответствующей схеме соединения его обмоток может быть включен в сеть на любое указанное в паспорте напряжение. Существуют двигатели на 500, 660 и 1140 В. Двигатели высокого напряжения изготовляют на напряжения 3000 и 6000 В. На корпусе двигателя имеется доска с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают буквами С1, С2 и С3, концы обмоток — соответственно С4, С5 и С6. Сердечник 5 ротора (см. рис. 10.1) представляет собой цилиндр, собранный, так же как и сердечник статора, из отдельных листов электротехнической стали, в котором имеются пазы 6 с обмоткой 7 ротора.
 |
Рис. 10.3. Короткозамкнутый ротор (а), короткозамкнутая обмотка ротора («беличья клетка») (б) |
 |
| Рис. 10.4. Фазный ротор (с контактными кольцами) |
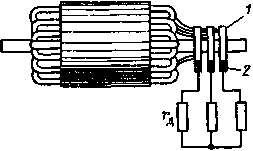
Обмотки ротора бывают двух видов — короткозамкнутые и фазные. Соответственно этому различают асинхронные двигатели с короткозамкнутым и фазным ротором (с контактными кольцами). На рис. 10.3, а изображен короткозамкнутый ротор, на рис. 10.3, б — короткозамкнутая обмотка. Короткозамкнутая обмотка состоит из стержней 1, расположенных в пазах, и замыкающих колец 2. Стержни присоединены к замыкающим кольцам, в результате чего обмотка оказывается короткозамкнутой. Стержни и замыкающие кольца в одних двигателях изготовляют из меди, в других — из алюминия, в третьих — из бронзы и т. д. Алюминиевую обмотку получают путем заливки в пазы жидкого алюминия. По внешнему виду (рис. 10.3, б) короткозамкнутая обмотка напоминает беличье колесо, поэтому ее иногда называют «беличьей клеткой». На рис. 10.4 изображен фазный ротор (с контактными кольцами). Фазную обмотку ротора выполняют так же, как и обмотку статора. Она всегда соединяется звездой. Начала фаз обмотки присоединяют к контактным кольцам 1 (рис. 10.4), которые изготовляют из стали или латуни и располагают на валу двигателя. Кольца изолированы друг от друга, а также от вала двигателя. К кольцам прижимаются пружинами металлографитные щетки2, расположенные в неподвижных щеткодержателях. С помощью контактных колец и щеток в цепь ротора включается дополнительный резистор rд , который является или пусковым (для увеличения пускового момента и одновременного уменьшения пускового тока) или регулировочным (для изменения частоты вращения ротора двигателя). Вал ротора 9 (см. рис. 10.1) изготовлен из стали и вращается в шариковых или роликовых подшипниках 10. Подшипники укреплены в подшипниковых щитах 11, которые изготовлены из чугуна или стали и прикрепляются к корпусу болтами.
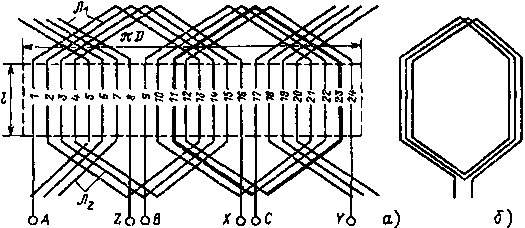 |
Рис. 10.5 Развернутая схема обмотки статора асинхронного двигателя (а), секции обмотки (б) |
Соединение отдельных проводников одной фазы обмотки между собой и взаимное расположение обмоток всех трех фаз статора можно проследить с помощью развернутой схемы обмотки статора двухполюсного асинхронного двигателя, изображенной на рис. 10.5, а.Обозначения на рисунке: πD — длина внутренней окружности сердечника статора; l — длина сердечника статора, цифры от 1 до 24 — пазы. Фаза А — X начинается с проводника, лежащего в пазу 1. Первый проводник с помощью лобовой части обмотки Л1 соединен с проводником, лежащим в пазу 13, последний в свою очередь с помощью лобовой части обмотки Л2 соединен с проводником, лежащим в пазу 2, и т. д. Конец обмотки соединен с проводником, лежащим в пазу 16. Таким образом, фаза А — Xзанимает восемь пазов. Аналогичным образом соединяются проводники фаз В — Y и С — Z. Из рисунка видно, что начала и концы одной фазы двухполюсного двигателя сдвинуты в пространстве относительно другой на восемь пазов, что составляет 1/3 окружности, т. е. 120°. Часть обмотки, выделенная на рис. 10.5, а жирной линией, называется секцией. Обычно секция состоит не из одного витка, как на рис, 10.5, а, а из нескольких витков (рис. 10.5, б). Такие секции изготовляют на шаблонах, потом их изолируют и придают им нужную форму. Секции укладывают в пазы и закрепляют с помощью деревянных клиньев. После того как все секции уложены, их соединяют в соответствии с развернутой схемой обмотки статора двигателя. Наряду с однослойными обмотками (см. рис. 10.5, а), когда в пазу расположена одна сторона одной секции, применяют двухслойные обмотки, в каждом пазу которой расположены две стороны двух секций. Тепловая энергия, возникающая в двигателе в результате потерь электрической энергии в его обмотках и магнитопроводе, нагревает двигатель. Для увеличения теплоотдачи ротор снабжен крыльчаткой 12 (см. рис. 10.1), прикрепленной к замыкающим кольцам короткозамкнутой обмотки. Крыльчатка обеспечивает интенсивное движение воздуха внутри и снаружи двигателя. На рис. 10.1 стрелками указано направление движения воздуха через двигатель.
7.3 Потери и кпд асинхронного двигателя
Магнитные потери Pм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике ротора и статора при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания
, β = 1,3÷1,5.
Частота перемагничивания сердечника статора равна f=50 Гц, соответственно, магнитные потери в сердечнике статора значительны, а частота перемагничивания сердечника ротора при номинальном скольжении составляет f=50∙s = (2…4)Гц и магнитные потери в сердечнике ротора малы, которые на практике не учитывают.
Электрические потери вызваны нагревом обмоток статора и ротора проходящими по ним токами:
 и
и  ,
,
где r1 и r2 – сопротивления обмоток фаз статора и ротора; m – число фаз.
В асинхронных двигателях с фазным ротором дополнительно имеются электрические потери в щеточном контакте.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора
В двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1.
Таким образом, часть подводимой к двигателю мощности затрачивается в статоре на магнитные РМ и электрические потери РЭ1. Оставшаяся электромагнитная мощность РЭМ передается на ротор, где расходуется на электрические потери РЭ2 и преобразуется в полную механическую мощность. Часть этой мощности идет на покрытие механических и добавочных потерь, а оставшаяся мощность Р2 – полезная мощность двигателя.
Электрические потери в обмотках являются переменными потерями, так как их величина зависит от нагрузки двигателя, то есть от значений токов в обмотках статора и ротора. Переменными являются и добавочные потери. Магнитные и механические потери практически не зависят от нагрузки.
Коэффициент полезного действия асинхронного двигателя определяется
С изменениями нагрузки КПД меняет свою величину: в режиме холостого хода КПД равен нулю, а с ростом нагрузки КПД увеличивается, достигая максимума при нагрузке равной (0,7÷0,8)Рном.
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт η= 75÷88 %, а для двигателей мощностью более 10 кВт η = 90÷94 %.
Коэффициент полезного действия один из основных параметров асинхронного двигателя, который определяет его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности.
Какие бывают потери в электродвигателях?
В любых электродвигателях и генераторах процесс преобразования электрической энергии в механическую и наоборот всегда сопровождается так называемыми потерями, то есть рассеиванием части подводимой энергии.
В электродвигателях принято различать основные и добавочные потери.
Основные потери – это те потери, которые образуются в результате протекания тех механических и электромагнитных процессов, без которых невозможна работа двигателя в принципе. К ним относятся: электрические потери в обмотках и в контактах, магнитные потери в сердечниках, а также механические потери.
Добавочные потери – это те потери, которые возникают при протекании вторичных электромагнитных процессов. К таким потерям относятся потери из-за пульсирующего характера магнитного потока, потери вследствие наличия высших гармонических в кривых МДС ротора и статора, потери, обусловленные потоками рассеяния обмоток и др.
Потери в обмотках
Потери данного типа (за исключением параллельной обмотки возбуждения двигателя постоянного тока) вычисляются по двум параметрам: ток и сопротивление обмотки. Если принять во внимание, что температура обмоток различных двигателей различна (с учетом того, что двигатели работают в нормальном режиме), то при вычислении потерь величина сопротивления обмоток принимается в зависимости от стандартной рабочей температуры по ГОСТ 183-74. Для обмоток, имеющих изоляцию класса нагревостойкости В – 75⁰ С. Для обмоток с изоляцией классов Н и F – 115⁰ С.Если речь идет о потерях в параллельной обмотке возбуждения, то они вычисляются по напряжению возбуждения и по току.
Потери в переходных контактах щеток
Потери данного типа определяются по двум параметрам: ток и переходное падение напряжения в щетках. Второй параметр зависит от того, каково исполнение щеток. Так, у графитовых щеток его величина колеблется от 1,4 до 2,4 В. У металлографитных – от 0,2 до 1,1 В. При вычислении потерь считается, что падение напряжения не зависит от тока.
Потери в стальных сердечниках
Большая часть потерь данного типа возникает в тех частях сердечников, которые наиболее подвержены так называемому перемагничиванию – это статор двигателя переменного тока (а именно, спинка и зубцы) и якорь двигателя постоянного тока.
Механические потери
Потери данного типа включают в себя несколько разновидностей: потери на трение в подшипниках, потери от трения щеток, якоря или ротора, потери, вызванные вентиляцией мотора.
Добавочные потери
Наиболее выраженные добавочные потери различаются в зависимости от типа электродвигателя. Так, у асинхронных моторов наибольшие добавочные потери возникают на поверхности ротора, а также на статоре при холостом ходу. Это обусловлено зубчатым строением статора. У двигателей постоянного тока наибольшие добавочные потери возникают на поверхности полюсов вследствие воздействия вихревых токов и пульсации потока. У синхронных электродвигателей максимальные добавочные потери возникают в демпферной обмотке и на поверхности полюсов. Кроме того, значительные потери образуются в обмотке статора как следствие наличия вихревых токов, наведенных собственным потоком рассеивания.