INPUT | INPUT_PULLUP | OUTPUT
Defining Digital Pins modes: INPUT, INPUT_PULLUP, and OUTPUT
Digital pins can be used as INPUT , INPUT_PULLUP , or OUTPUT . Changing a pin with pinMode() changes the electrical behavior of the pin.
INPUT
Arduino (ATmega) pins configured as INPUT with pinMode() are said to be in a high-impedance state. Pins configured as INPUT make extremely small demands on the circuit that they are sampling, equivalent to a series resistor of 100 Megohms in front of the pin. This makes them useful for reading a sensor.
If you have your pin configured as an INPUT , and are reading a switch, when the switch is in the open state the input pin will be «floating», resulting in unpredictable results. In order to assure a proper reading when the switch is open, a pull-up or pull-down resistor must be used. The purpose of this resistor is to pull the pin to a known state when the switch is open. A 10 K ohm resistor is usually chosen, as it is a low enough value to reliably prevent a floating input, and at the same time a high enough value to not draw too much current when the switch is closed. See the Digital Read Serial tutorial for more information.
If a pull-down resistor is used, the input pin will be LOW when the switch is open and HIGH when the switch is closed.
If a pull-up resistor is used, the input pin will be HIGH when the switch is open and LOW when the switch is closed.
INPUT_PULLUP
The ATmega microcontroller on the Arduino has internal pull-up resistors (resistors that connect to power internally) that you can access. If you prefer to use these instead of external pull-up resistors, you can use the INPUT_PULLUP argument in pinMode() .
See the Input Pullup Serial tutorial for an example of this in use.
Pins configured as inputs with either INPUT or INPUT_PULLUP can be damaged or destroyed if they are connected to voltages below ground (negative voltages) or above the positive power rail (5V or 3V).
OUTPUT
Pins configured as OUTPUT with pinMode() are said to be in a low-impedance state. This means that they can provide a substantial amount of current to other circuits. ATmega pins can source (provide current) or sink (absorb current) up to 40 mA (milliamps) of current to other devices/circuits. This makes them useful for powering LEDs because LEDs typically use less than 40 mA. Loads greater than 40 mA (e.g. motors) will require a transistor or other interface circuitry.
Pins configured as outputs can be damaged or destroyed if they are connected to either the ground or positive power rails.
Функция pinMode Arduino что это, описание

OUTPUT (порт работает как выход) — пин становится управляемым источником питания с максимальным током 40 мА. В зависимости от команды digitalWrite() пин принимает значение единицы или нуля. Пример: pinMode (10, OUTPUT);
Функция digitalWrite() и analogWrite()
Цифровой пин Ардуино может генерировать цифровой сигнал с помощью команды digitalWrite(), т.е. выдавать напряжение 5 Вольт. Цифровой сигнал может иметь два значения — 0 или 1 (0 Вольт или 5 Вольт). Если в программе используется команда analogWrite() для ШИМ портов платы, то микроконтроллер может генерировать сигнал PWM Arduino на портах — создавать имитацию аналогового сигнала.
void setup() < pinMode(10, OUTPUT); > void loop() < digitalWrite(10, HIGH); delay(250); digitalWrite(10, LOW); delay(250); >
К пинам ардуино нельзя подключать устройства, потребляющие ток более 40 мА, так как основное назначение микроконтроллера — это управления другими устройствами при помощи логических сигналов. Если к пину подключить устройство, потребляющее ток больше указанного значения, то пин может выгореть. Поэтому к выводам микроконтроллера Ардуино не следует подключать ничего мощнее светодиода.
Arduino pinMode INPUT (пины настроены как вход)
INPUT (порт работает как вход) — пин в этом режиме считывает данные с аналоговых и цифровых датчиков, состояния кнопок. Порт находится в высокоимпедансном состоянии, т.е. у пина высокое сопротивление. Пример: pinMode (10, INPUT);
Функция digitalRead() и analogRead()
Arduino может определить наличие напряжения на пине через функцию digitalRead(), которая возвращает 0 (LOW) или 1 (HIGH). Существует разница между цифровым датчиком (который обнаруживает включение/выключение) и аналоговым датчиком, значение которого постоянно изменяется. Используя функцию analogRead(), можно прочитать напряжение с аналогового датчика, функция возвращает число от 0 до 1023.
void setup() < pinMode(10, INPUT); Serial.begin(9600); > void loop() < int data = digitalRead(10); Serial.println(data); delay(250); >
Нельзя подавать на вход микроконтроллера напряжение выше напряжения питания платы. Кроме того, для аналоговых выводов Ардуино можно использовать команды digitalRead() и digitalWrite(). В этом случае аналоговые порты будут считывать (digitalRead) или выдавать (digitalWrite) цифровой, а не аналоговый сигнал.
Arduino pinMode INPUT_PULLUP
INPUT_PULLUP (порт работает как вход) но к пину подключается резистор в 20 кОм. В этом режиме при подключении кнопки к Ардуино можно не использовать внешние подтягивающие резисторы. Пример: pinMode (10, INPUT_PULLUP);
Digital Pins
Discover how digital pins work and how they can be configured.
Last revision 01/24/2024
The pins on the Arduino can be configured as either inputs or outputs. This document explains the functioning of the pins in those modes. While the title of this document refers to digital pins, it is important to note that vast majority of Arduino (Atmega) analog pins, may be configured, and used, in exactly the same manner as digital pins.
Properties of Pins Configured as INPUT
Arduino (Atmega) pins default to inputs, so they don’t need to be explicitly declared as inputs with pinMode() when you’re using them as inputs. Pins configured this way are said to be in a high-impedance state. Input pins make extremely small demands on the circuit that they are sampling, equivalent to a series resistor of 100 megohm in front of the pin. This means that it takes very little current to move the input pin from one state to another, and can make the pins useful for such tasks as implementing a capacitive touch sensor, reading an LED as a photodiode, or reading an analog sensor with a scheme such as RCTime.
This also means however, that pins configured as pinMode(pin, INPUT) with nothing connected to them, or with wires connected to them that are not connected to other circuits, will report seemingly random changes in pin state, picking up electrical noise from the environment, or capacitively coupling the state of a nearby pin.
Pullup Resistors with pins configured as INPUT
Often it is useful to steer an input pin to a known state if no input is present. This can be done by adding a pullup resistor (to +5V), or a pulldown resistor (resistor to ground) on the input. A 10K resistor is a good value for a pullup or pulldown resistor.
Properties of Pins Configured as INPUT_PULLUP
There are 20K pullup resistors built into the Atmega chip that can be accessed from software. These built-in pullup resistors are accessed by setting the pinMode() as INPUT_PULLUP. This effectively inverts the behavior of the INPUT mode, where HIGH means the sensor is off, and LOW means the sensor is on.
The value of this pullup depends on the microcontroller used. On most AVR-based boards, the value is guaranteed to be between 20kΩ and 50kΩ. On the Arduino Due, it is between 50kΩ and 150kΩ. For the exact value, consult the datasheet of the microcontroller on your board.
When connecting a sensor to a pin configured with INPUT_PULLUP, the other end should be connected to ground. In the case of a simple switch, this causes the pin to read HIGH when the switch is open, and LOW when the switch is pressed.
The pullup resistors provide enough current to dimly light an LED connected to a pin that has been configured as an input. If LEDs in a project seem to be working, but very dimly, this is likely what is going on.
The pullup resistors are controlled by the same registers (internal chip memory locations) that control whether a pin is HIGH or LOW. Consequently, a pin that is configured to have pullup resistors turned on when the pin is an INPUT, will have the pin configured as HIGH if the pin is then switched to an OUTPUT with pinMode(). This works in the other direction as well, and an output pin that is left in a HIGH state will have the pullup resistors set if switched to an input with pinMode().
Prior to Arduino 1.0.1, it was possible to configure the internal pull-ups in the following manner:
1pinMode(pin, INPUT); // set pin to input 2 digitalWrite(pin, HIGH); // turn on pullup resistorsNOTE: Digital pin 13 is harder to use as a digital input than the other digital pins because it has an LED and resistor attached to it that’s soldered to the board on most boards. If you enable its internal 20k pull-up resistor, it will hang at around 1.7V instead of the expected 5V because the onboard LED and series resistor pull the voltage level down, meaning it always returns LOW. If you must use pin 13 as a digital input, set its pinMode() to INPUT and use an external pull down resistor.
Properties of Pins Configured as OUTPUT
Pins configured as OUTPUT with pinMode() are said to be in a low-impedance state. This means that they can provide a substantial amount of current to other circuits. Atmega pins can source (provide positive current) or sink (provide negative current) up to 40 mA (milliamps) of current to other devices/circuits. This is enough current to brightly light up an LED (don’t forget the series resistor), or run many sensors, for example, but not enough current to run most relays, solenoids, or motors.
Short circuits on Arduino pins, or attempting to run high current devices from them, can damage or destroy the output transistors in the pin, or damage the entire Atmega chip. Often this will result in a «dead» pin in the microcontroller but the remaining chip will still function adequately. For this reason it is a good idea to connect OUTPUT pins to other devices with 470Ω or 1k resistors, unless maximum current draw from the pins is required for a particular application.
See Also
Suggested changes
The content on docs.arduino.cc is facilitated through a public GitHub repository. You can read more on how to contribute in the contribution policy.
Аналоговые пины

В прошлом уроке мы разобрали измерение и вывод цифрового сигнала, а в этом разберём аналоговый сигнал. Зачем нужно читать аналоговый сигнал? Микроконтроллер может выступать в роли вольтметра, измерять собственное напряжение питания, например от аккумулятора, может измерять ток через шунт (если вы знаете закон Ома), можно измерять сопротивление, а также работать с потенциометрами (крутильными, линейными, джойстиками), которые являются очень удобными органами управления.
В уроке про возможности микроконтроллера мы обсуждали аналоговые входы, т.е. входы, подключенные к АЦП – аналогово-цифровому преобразователю (ADC). Взглянем на распиновку популярных плат (Arduino Nano и Wemos Mini):
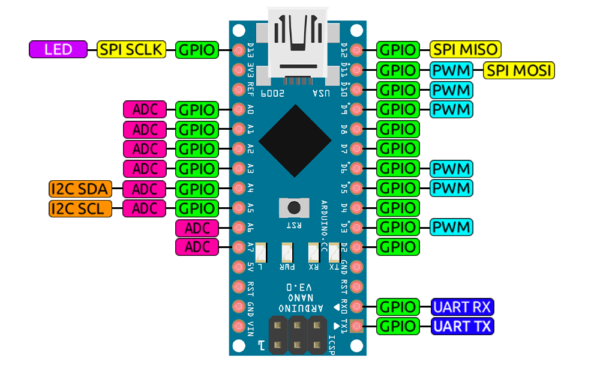
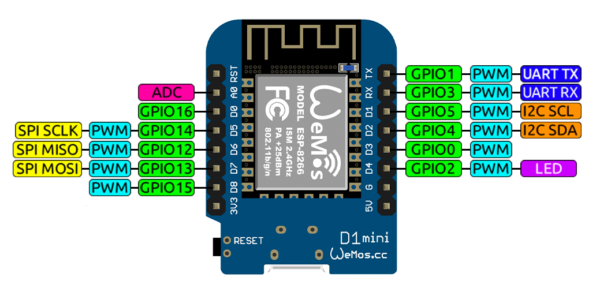
Пины, на которых выведен ADC, могут измерять аналоговый сигнал. На плате Nano это пины, маркированные буквой А (A0–A7), а у esp8266 такой пин всего один – A0.
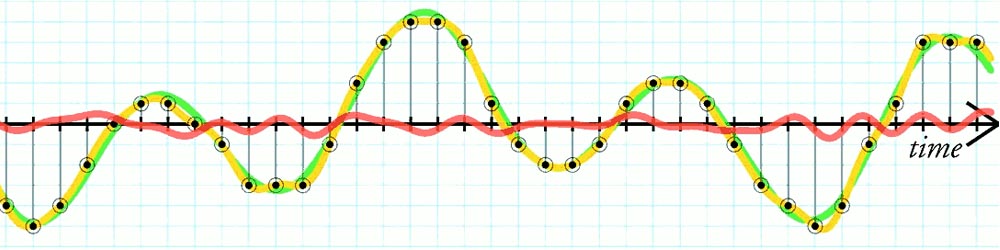
Чтение сигнала
“Аналоговые” пины могут принимать напряжение от 0V (GND) до опорного напряжения и преобразовывать его в цифровое значение, просто в какие-то условные единицы. АЦП на AVR и esp8266 имеет разрядность в 10 бит, т.е. мы получаем измеренное напряжение в виде числа от 0 до 1023 .
Функция, которая оцифровывает напряжение, называется analogRead(pin) . Она принимает в качестве аргумента номер аналогового пина и возвращает оцифрованное напряжение. Сам пин должен быть сконфигурирован как INPUT (вход). Нумерация:
- Arduino Nano:
- Просто номером А-пина: A0 – 0
- Как на плате: A0 – A0
- Порядковым номером GPIO: А0 – 14 , A1 – 15 .. А7 – 21
- Просто номером А-пина: A0 – 0
- Как на плате: A0 – A0
Пример, опрашивающий пин А0:
int value1 = analogRead(0); // считать напряжение с пина A0 int value2 = analogRead(A0); // считать напряжение с пина A0 int value3 = analogRead(14); // считать напряжение с пина A0
Хранить полученное значение разумно в переменной типа int , потому что значение варьируется от 0 до 1023.
Нельзя подавать на аналоговый пин напряжение выше напряжения питания МК. Через ограничивающий резистор (~10k) – можно, но всё равно не рекомендуется этого допускать.
Потенциометры
Аналоговые пины очень часто используются при работе с потенциометрами (переменный резистор). При помощи полученного значения можно влиять на ход работы программы, менять какие-то настройки и тому подобное. У потенциометра всегда три ноги: две крайние и одна центральная. Всё вместе это представляет собой делитель напряжения, который и позволяет менять напряжение в диапазоне 0-VCC:
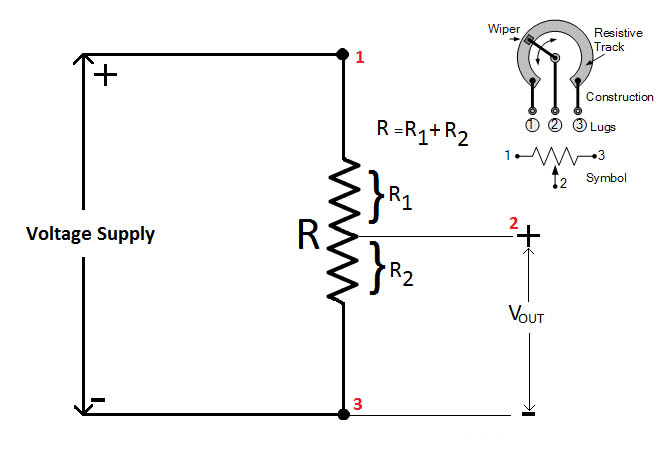 К Arduino потенциометр подключается следующим образом: средний вывод на любой A-пин, крайние – на GND и питание. От порядка подключения GND и питания зависит направление изменения значения. Что касается сопротивления, то читай заметку по делителям напряжения ниже в этом уроке. Чаще всего для МК ставят потенциометры с сопротивлением 10 кОм, но диапазон в принципе очень широк: от 1 кОм до 100 кОм. Чем больше, тем более шумным будет приходить сигнал, а если брать меньше – пойдут потери тока в нагрев потенциометра, а это никому не нужно.
К Arduino потенциометр подключается следующим образом: средний вывод на любой A-пин, крайние – на GND и питание. От порядка подключения GND и питания зависит направление изменения значения. Что касается сопротивления, то читай заметку по делителям напряжения ниже в этом уроке. Чаще всего для МК ставят потенциометры с сопротивлением 10 кОм, но диапазон в принципе очень широк: от 1 кОм до 100 кОм. Чем больше, тем более шумным будет приходить сигнал, а если брать меньше – пойдут потери тока в нагрев потенциометра, а это никому не нужно. 
Опорное напряжение (для AVR Arduino)
Опорное напряжение играет главную роль в измерении аналогового сигнала, потому что именно от него зависит максимальное измеряемое напряжение и вообще возможность и точность перевода полученного значения 0-1023 в Вольты. Изучим функцию analogReference(mode) , где mode:
- DEFAULT : опорное напряжение равно напряжению питания МК. Активно по умолчанию
- INTERNAL : встроенный источник опорного на 1.1V (для ATmega168 или ATmega328P) и 2.56V (на ATmega8)
- INTERNAL1V1 : встроенный источник опорного на 1.1V (только для Arduino Mega)
- INTERNAL2V56 : встроенный источник опорного на 2.56V (только для Arduino Mega)
- EXTERNAL : опорным будет считаться напряжение, поданное на пин AREF
После изменения источника опорного напряжения (вызова analogReference() ) первые несколько измерений могут быть нестабильными. Значение 1023 функции analogRead() будет соответствовать выбранному опорному напряжению или напряжению выше его.
В режиме DEFAULT мы можем оцифровать напряжение от 0 до напряжения питания VCC. Если напряжение питания 4.5 Вольта, и мы подаём 4.5 Вольт – получим оцифрованное значение 1023. Если подаём 5 Вольт – опять же получим 1023, т.к. выше опорного. Это правило работает и дальше, главное не превышать 5.5 Вольт. Как измерять более высокое напряжение, читайте ниже.
Что касается точности: при питании от 5V и режиме DEFAULT мы получим точность измерения напряжения (5 / 1024) ~4.9 милливольт. Поставив INTERNAL мы можем измерять напряжение от 0V до 1.1V с точностью (1.1 / 1024) ~0.98 милливольт. Весьма неплохо, особенно если баловаться с делителем напряжения.
Что касается внешнего источника опорного напряжения: нельзя подавать напряжение меньше 0V (отрицательное) или выше 5.5V в качестве внешнего опорного в пин AREF. Также при подключении внешнего опорного напряжения нужно вызвать analogReference(EXTERNAL) до первого вызова функции analogRead() (начиная с запуска программы), иначе можно повредить микроконтроллер!
Чтобы “на лету” переключаться между внутренними и внешним опорными, можно подключить его на AREF через резистор на ~5 кОм. Вход AREF имеет собственное сопротивление в 32 кОм, поэтому реальное опорное будет вычисляться по формуле REF = V * 32 / (R + 32), где R – сопротивление резистора (кОм), через которое подключено опорное напряжение V (Вольт). Например для 2.5V получим 2.5 * 32 / (32 + 5) = ~2.2V реальное опорное.
Измерение напряжения
0-5 Вольт
Простой пример, как измерить напряжение на аналоговом пине и перевести его в Вольты. Плата питается от 5V.
float voltage = (float)(analogRead(0) * 5.0) / 1024;
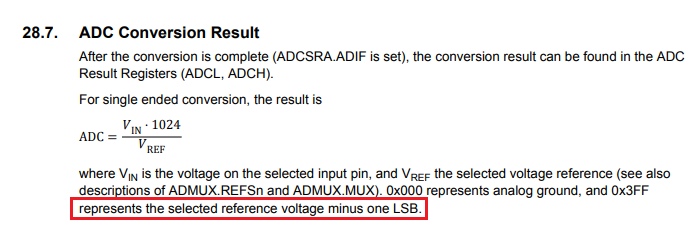
Таким образом переменная voltage получает значение в Вольтах, от 0 до 5. Чуть позже мы поговорим о более точных измерениях при помощи некоторых хаков. Почему мы делим на 1024, а не на 1023 , ведь максимальное значение измерения с АЦП составляет 1023? Ответ можно найти в даташите:
АЦП при преобразовании отнимает один бит, т.е. 5.0 Вольт он в принципе может измерить только как 4.995, что и получится по формуле выше: 1023 * 5 / 1024 == 4.995.. . Таким образом делить нужно на 1024.Сильно больше 5 Вольт
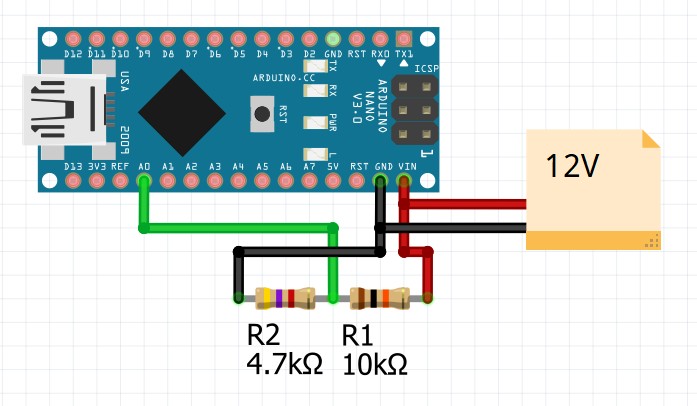
Для измерения постоянного напряжения больше 5 Вольт нужно использовать делитель напряжения на резисторах (Википедия). Схема подключения, при которой плата питается от 12V в пин Vin и может измерять напряжение источника (например, аккумулятора):
Код для перевода значения с analogRead() в Вольты с учётом делителя напряжения:// GND -- [ R2 ] -- A0 -- [ R1 ] -- VIN #define VREF 5.1 // точное напряжение на пине 5V (в данном случае зависит от стабилизатора на плате Arduino) #define DIV_R1 10000 // точное значение 10 кОм резистора #define DIV_R2 4700 // точное значение 4.7 кОм резистора void setup() < float voltage = (float)analogRead(0) * VREF * ((DIV_R1 + DIV_R2) / DIV_R2) / 1024; >void loop() <>
Как выбрать/рассчитать делитель напряжения?
- Согласно даташиту на ATmega, сумма R1 + R2 не рекомендуется больше 10 кОм для достижения наибольшей точности измерения. В то же время через делитель на 10 кОм будет течь ощутимый ток, что критично для автономных устройств (читай ниже). Если девайс работает от сети или от аккумулятора, но МК не используется в режиме сна – ставим делитель 10 кОм и не задумываемся. Также рекомендуется поставить конденсатор между GND и аналоговым пином для уменьшения помех.
- Если девайс работает от аккумулятора и микроконтроллер “спит”: пусть аккумулятор 12V, тогда через 10 кОм делитель пойдёт ток 1.2 мА. Сам микроконтроллер в режиме сна потребляет ~1 мкА, что в тысячу раз меньше! На самом деле можно взять делитель с гораздо бОльшим суммарным сопротивлением (но не больше 20 МОм, внутреннего сопротивления самого АЦП), но обязательно поставить конденсатор на ~0.1 мкФ между аналоговым пином и GND (вот здесь проводили эксперимент). Таким образом например при при R1+R2 = 10 МОм (не забыть про конденсатор) ток через делитель будет 1.2 мкА, что уже гораздо лучше!
- Коэффициент делителя (не тот, который в Википедии) равен (R1 + R2) / R2 . Коэффициент должен быть таким, чтобы при делении на него измеряемого напряжения не получилось больше напряжения питания МК. У меня в примере (10 + 4.7) / 4.7 ~ 3.13 . Я хочу измерять литиевый аккумулятор с максимальным напряжением 12.8 Вольт. 12.8 / 3.13 ~ 4 Вольта – отлично. Например для измерения 36 Вольт я бы взял делитель с плечами 100к и 10к.
- Можно воспользоваться онлайн-калькулятором.
Сильно меньше 5 Вольт
Для более точных измерений маленького напряжения можно подключить пин AREF к источнику низкого опорного напряжения (об этом было выше), чтобы “сузить” диапазон работы АЦП. Источник может быть как внешний, так и внутренний, например изменив опорное на внутреннее 1.1V ( analogReference(INTERNAL) ) можно измерять напряжение от 0 до 1.1 Вольта с точностью 1.1/1024 ~ 1.01 мВ.
Видео
Полезные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макросы, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])