Как программировать лего mindstorms ev3
Информация о материале Категория: Первые шаги Просмотров: 210263


Введение:
Задача данного курса — познакомить вас с конструктором Lego mindstorms. Научить собирать базовые конструкции роботов, программировать их под определенные задачи, разобрать с вами базовые решения наиболее распространенных задач-соревнований.
Курс рассчитан на делающих первые шаги в мир робототехники с помощью конструктора Lego mindstorms. Хотя все примеры роботов в этом курсе сделаны с помощью конструктора Lego mindstorms EV3, программирование роботов объясняется на примере среды разработки Lego mindstorms EV3, тем не менее, владельцы Lego mindstorms NXT тоже могут присоединиться к изучению данного курса, и, надеемся, найдут для себя тоже полезное.
Урок №2 — Программирование движения робота
Информация о материале Категория: Первые шаги Просмотров: 342036
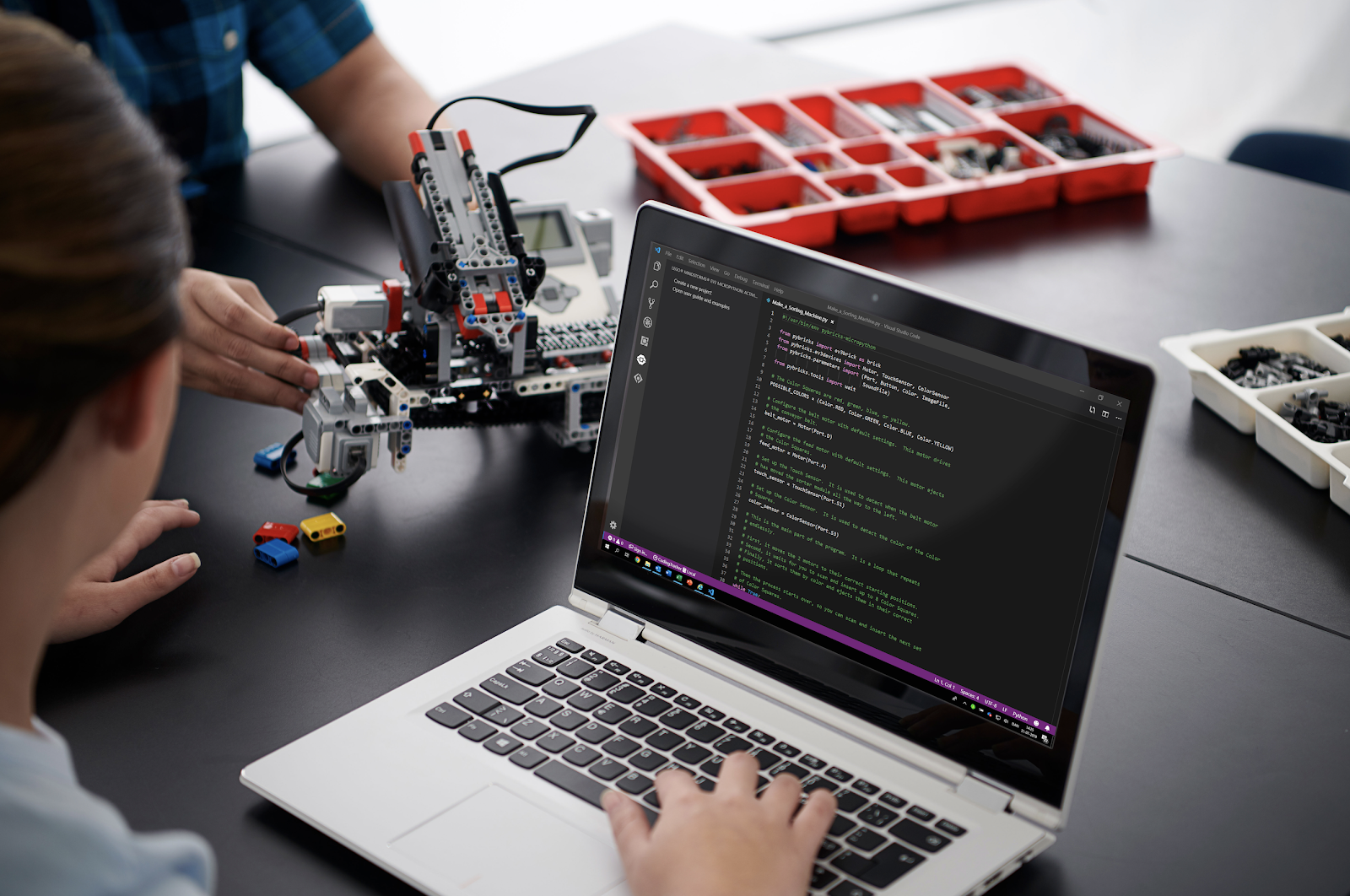
LEGO MINDSTORMS Education EV3 + MicroPython: программируем детский конструктор взрослым языком
Привет, Хабр! Мы уже рассказывали о платформе LEGO MINDSTORMS Education EV3. Основные задачи этой платформы — обучение на практических примерах, развитие навыков STEAM и формирование инженерного мышления. В ней можно проводить лабораторные работы по изучению механики и динамики. Лабораторные стенды из кубиков LEGO и утилиты по регистрации и обработке данных делают опыты еще интереснее и нагляднее и помогают детям лучше понять физику. Например, школьники могут собрать данные о температуре плавления и с помощью приложения систематизировать их и представить в виде графика. Но это только начало: сегодня мы расскажем, как дополнить этот набор средой программирования MicroPython и использовать его для обучения робототехнике.
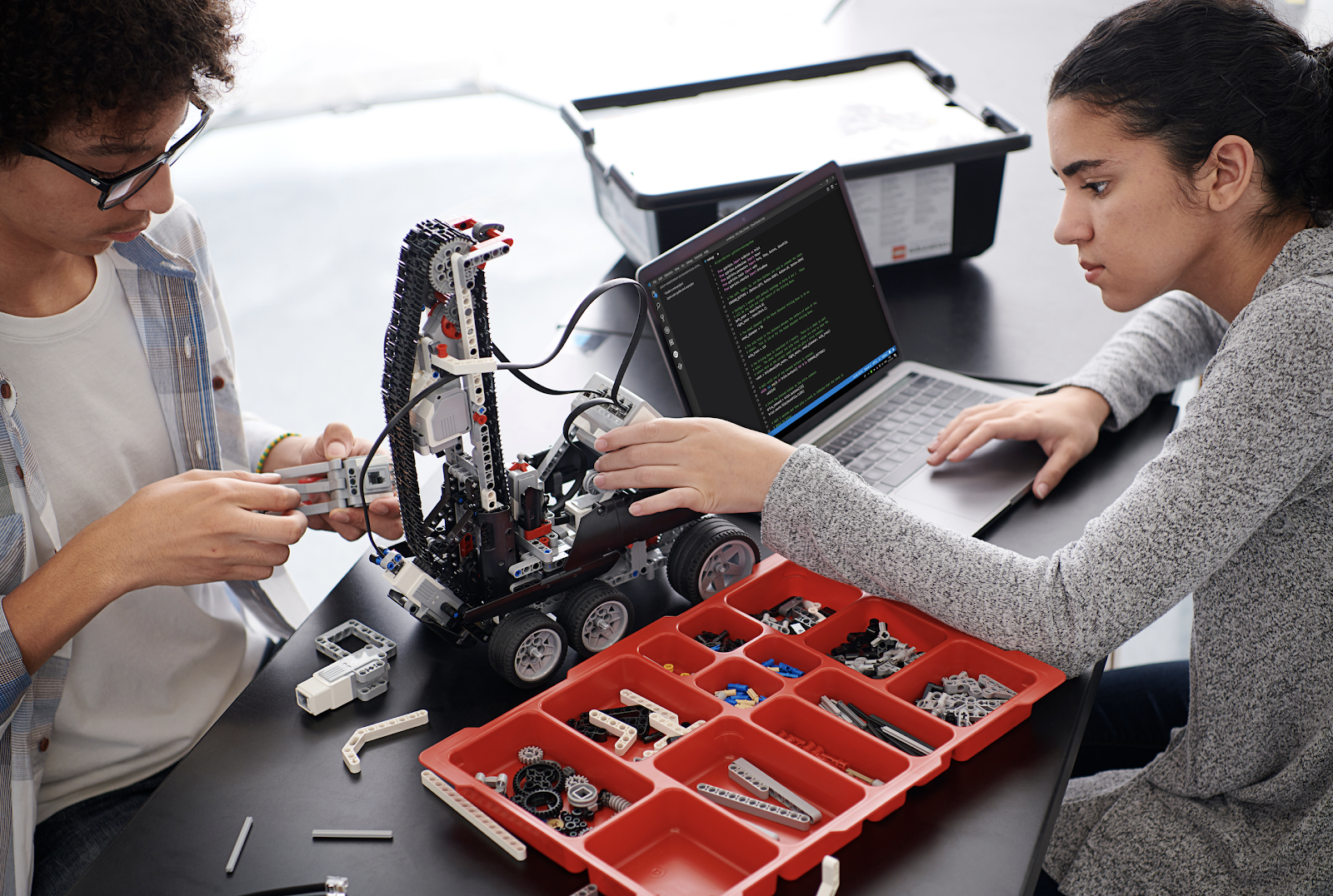
Учим программированию с помощью EV3
Современные школьники хотят видеть красочный результат. Да, им скучно, если программа выводит в консоль числа, и они хотят рассматривать цветные графики, диаграммы и создавать настоящих роботов, движущихся и выполняющих команды. Обычный код тоже кажется детям слишком сложным, поэтому обучение лучше начинать с чего-нибудь полегче.
Базовая среда программирования EV3 создана на основе графического языка LabVIEW и позволяет задавать алгоритмы для робота визуально: команды представлены в виде блоков, которые можно перетаскивать и соединять.
Такой способ хорошо работает, когда нужно показать, как строятся алгоритмы, но он не подходит для программ с большим количеством блоков. При усложнении сценариев необходимо переходить на программирование с помощью кода, но детям трудно сделать этот шаг.
Здесь есть несколько хитростей, одна из которых — показать, что код выполняет те же задачи, что и блоки. В среде EV3 это можно сделать благодаря интеграции с MicroPython: дети создают одну и ту же программу в базовой среде программирования с помощью блоков и на языке Python в Visual Studio Code от Microsoft. Они видят, что оба способа работают одинаково, но кодом решать сложные задачи удобнее.
Переходим на MicroPython
Среда EV3 построена на базе процессора ARM9, и разработчики специально оставили архитектуру открытой. Это решение позволило накатывать альтернативные прошивки, одной из которых стал образ для работы с MicroPython. Он позволяет использовать Python для программирования EV3, что делает работу с набором еще ближе к задачам из реальной жизни.
Чтобы начать работать, нужно скачать образ EV3 MicroPython на любую microSD-карту, установить ее в микрокомпьютер EV3 и включить его. Затем нужно установить бесплатное расширение для Visual Studio. И можно приступить к работе.
Программируем первого робота на MycroPython
На нашем сайте есть несколько уроков для освоения базовых понятий робототехники. Модели на EV3 знакомят детей с азами, которые используются в самоуправляемых автомобилях, заводских роботах-сборщиках, станках с ЧПУ.
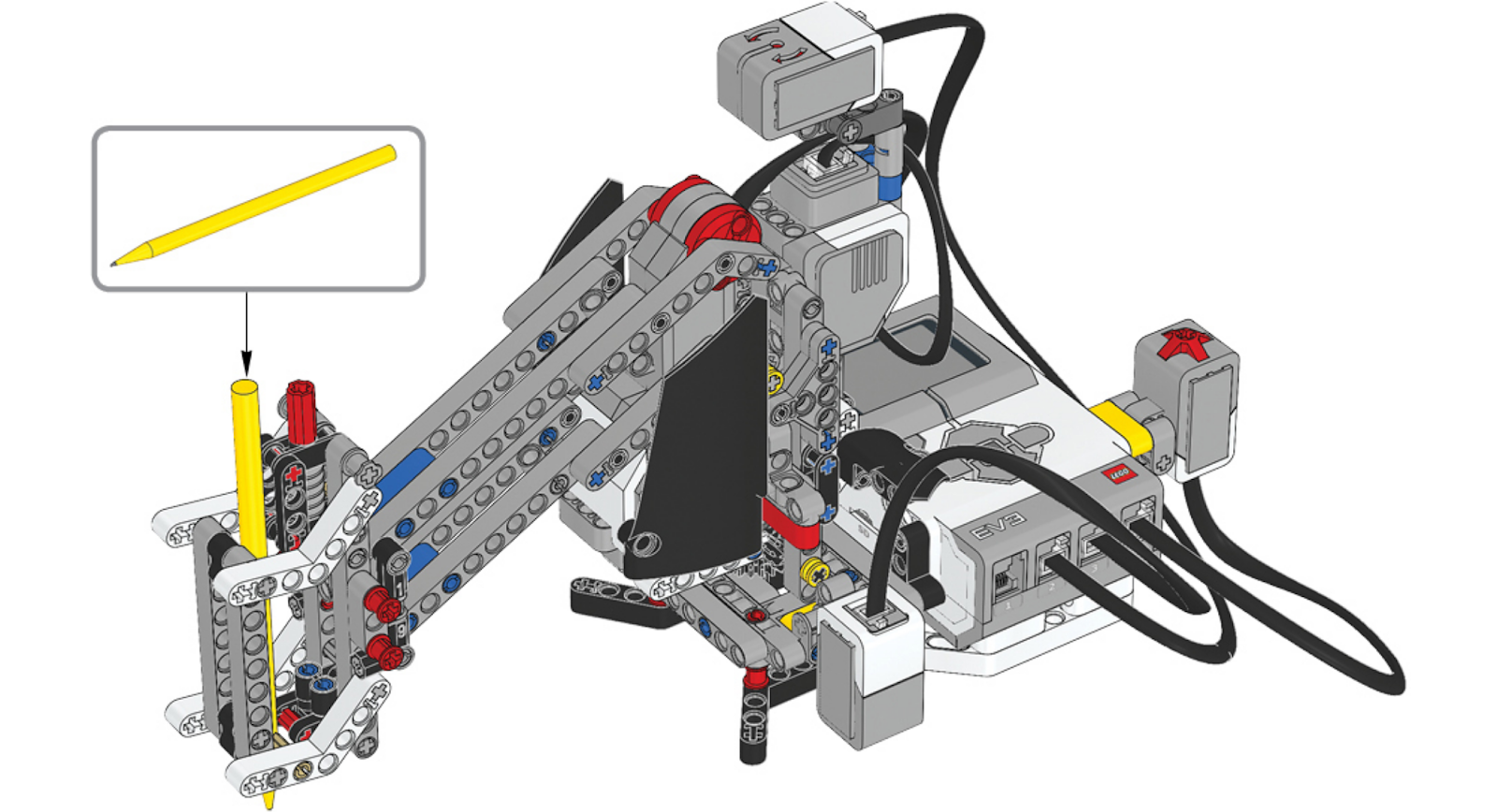
Мы возьмем для примера чертежную машину, которую можно научить рисовать узоры и геометрические фигуры. Данный кейс является упрощенным вариантом взрослых роботов-сварщиков или фрезеровщиков и показывает, как можно использовать EV3 совместно с MicroPython для обучения школьников. А еще чертежная машина может разметить отверстия в печатной плате для папы, но это уже другой уровень, требующий математических расчетов.
Для работы нам понадобятся:
- базовый набор LEGO MINDSTORMS Education EV3;
- большой лист клетчатой бумаги;
- цветные маркеры.
Сначала инициализируем библиотеку модулей EV3:
#!/usr/bin/env pybricks-micropython from pybricks import ev3brick as brick from pybricks.ev3devices import (Motor, TouchSensor, ColorSensor, GyroSensor) from pybricks.parameters import Port, Stop, Direction, Color, ImageFile from pybricks.tools import wait Настраиваем платформу, которая вращает ручку как мотор в порте B. Задаем передаточное отношение двухступенчатой зубчатой передачи с количеством зубьев 20-12-28 соответственно.
turntable_motor = Motor(Port.B, Direction.CLOCKWISE, [20, 12, 28]) Настраиваем подъемный механизм для ручки как мотор в порте C:
seesaw_motor = Motor(Port.C) Настраиваем гироскоп, измеряющий угол наклона ручки, в порте 2:
gyro_sensor = GyroSensor(Port.S2) Настраиваем цветовой датчик в порте 3. Датчик используется, чтобы определять белую бумагу под чертежной машиной:
color_sensor = ColorSensor(Port.S3) Настраиваем датчик касания в порте 4. Робот начинает рисовать, когда датчик нажат:
touch_sensor = TouchSensor(Port.S4) Определяем функции, которые поднимают и опускают ручку:
def pen_holder_raise(): seesaw_motor.run_target(50, 25, Stop.HOLD) wait(1000) def pen_holder_lower(): seesaw_motor.run_target(50, 0, Stop.HOLD) wait(1000) Определяем функцию для поворота ручки на заданный угол или до определенного угла:
def pen_holder_turn_to(target_angle): if target_angle > gyro_sensor.angle(): Если целевой угол больше, чем текущий угол гироскопического датчика, продолжаем движение по часовой стрелке с положительной скоростью:
turntable_motor.run(70) while gyro_sensor.angle() < target_angle: pass elif target_angle < gyro_sensor.angle():
Если целевой угол меньше, чем текущий гироскопического датчика, то двигаемся против часовой стрелки:
turntable_motor.run(-70) while gyro_sensor.angle() > target_angle: pass
Останавливаем вращающуюся платформу, когда целевой угол будет достигнут:
turntable_motor.stop(Stop.BRAKE)
Устанавливаем начальное положение ручки в верхнем положении:
pen_holder_raise() Теперь идет основная часть программы — бесконечный цикл. Сначала EV3 ожидает, когда датчик цвета обнаружит белую бумагу или синюю стартовую клетку, а датчик касания будет нажат. Затем он рисует узор, возвращается в исходное положение и повторяет все заново.
Когда устройство не готово, светодиоды на контроллере принимают красный цвет, и на ЖК-экране отображается изображение «палец вниз»:
while True: brick.light(Color.RED) brick.display.image(ImageFile.THUMBS_DOWN) Дожидаемся, когда датчик цвета считает синий или белый цвет, устанавливаем цвет светодиодов зеленым, отображаем на ЖК-экране изображение «палец вверх» и сообщаем, что устройство готово к работе:
while color_sensor.color() not in (Color.BLUE, Color.WHITE): wait(10) brick.light(Color.GREEN) brick.display.image(ImageFile.THUMBS_UP)
Дожидаемся нажатия датчика касания, присваиваем гироскопическому датчику значение угла 0 и начинаем рисовать:
while not touch_sensor.pressed(): wait(10) gyro_sensor.reset_angle(0) pen_holder_turn_to(15) pen_holder_lower() pen_holder_turn_to(30) pen_holder_raise() pen_holder_turn_to(45) pen_holder_lower() pen_holder_turn_to(60)
Поднимаем держатель ручки и возвращаем его в исходное положение:
pen_holder_raise() pen_holder_turn_to(0)
Вот такая несложная программа у нас получилась. И теперь запускаем ее и смотрим на робота-чертежника в деле.
Что дают такие примеры
EV3 — это инструмент для профориентации в рамках профессий STEM и точка входа в инженерные специальности. Так как на нем можно решать практические задачи, дети получают опыт технических разработок и создания промышленных роботов, учатся моделировать реальные ситуации, понимать программы и анализировать алгоритмы, осваивают базовые конструкции программирования.
Поддержка MicroPython делает платформу EV3 подходящей для обучения в старших классах. Ученики могут попробовать себя в роли программистов на одном из самых популярных современных языков, познакомиться с профессиями, связанными с программированием и инженерным проектированием. Наборы EV3 показывают, что писать код — это не страшно, готовят к серьезным инженерным задачам и помогают сделать первый шаг к освоению технических специальностей. А для тех, кто работает в школе и связан с образованием, у нас подготовлены программы занятий и учебные материалы. В них детально расписано, какие навыки формируются при выполнении тех или иных задач, и как полученные навыки соотносятся со стандартами обучения.
- lego
- lego mindstorms
- ev3
- конструктор
- детское программирование
- Блог компании LEGO Education
- Python
- Программирование
- Учебный процесс в IT
- Робототехника
Как программировать лего mindstorms ev3
Введение:
На втором занятии мы детальнее познакомимся со средой программирования и подробно изучим команды, задающие движение нашему роботу-тележке, собранному на первом занятии. Итак, давайте запустим среду программирования Lego mindstorms EV3, загрузим наш проект lessons.ev3, созданный ранее и добавим в проект новую программу - lesson-2-1. Программу можно добавить двумя способами:
- Выбрать команду "Файл"-"Добавить программу" (Ctrl+N).
- Нажать "+" на вкладке программ.

Рис. 1
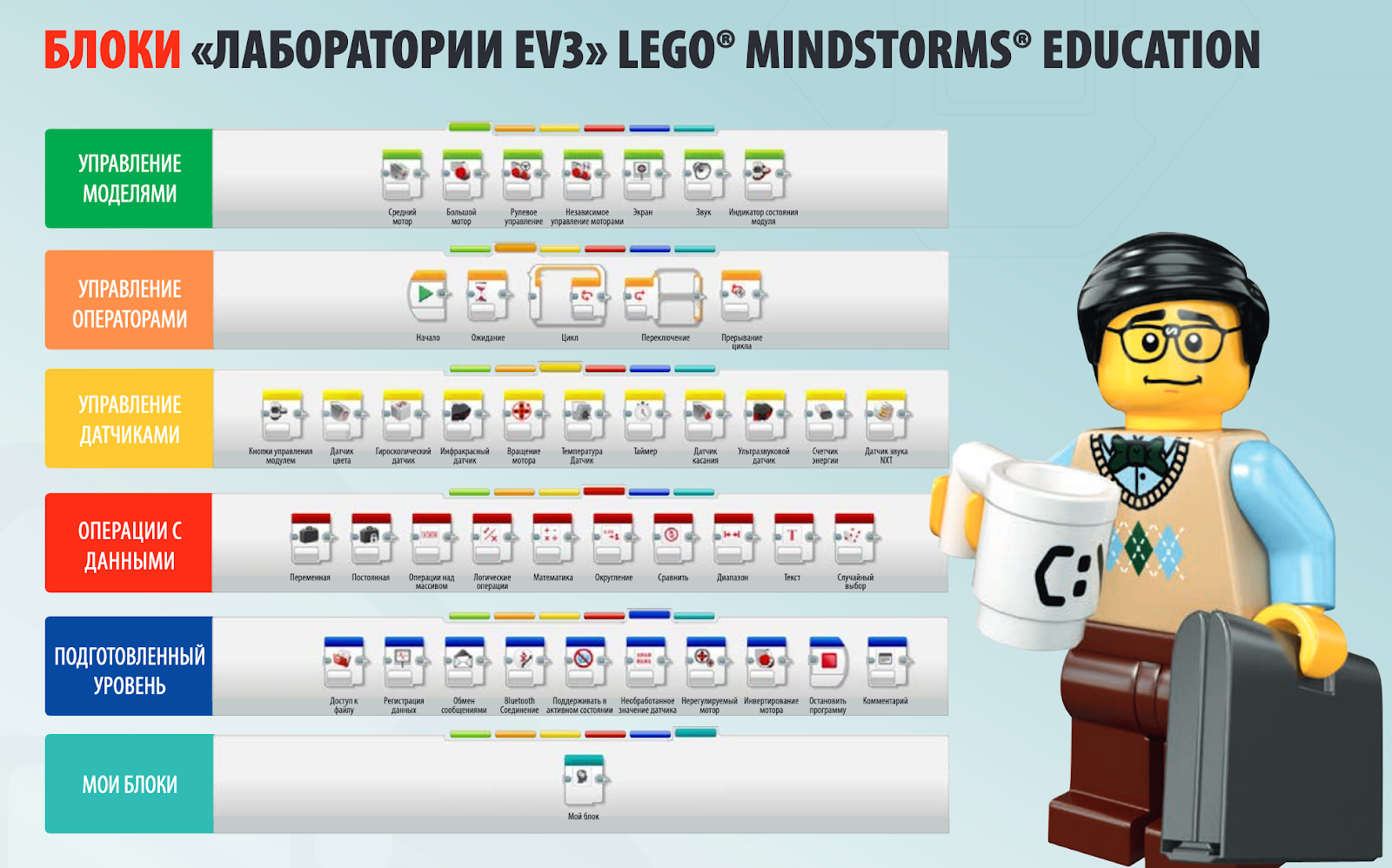
2.1. Палитры программирования и программные блоки
Давайте теперь обратим свой взгляд в нижний раздел среды программирования. Из материала первого занятия мы уже знаем, что здесь находятся команды для программирования робота. Разработчики применили оригинальный прием и, сгруппировав программные блоки, присвоили каждой группе свой цвет, назвав группы палитрами.
Зеленая палитра называется: "Действие":

Рис. 2
На данной палитре расположены программные блоки управления моторами, блок вывода на экран, блок управления индикатором состояния модуля. Сейчас мы начнем изучение этих программных блоков.
2.2. Зеленая палитра – блоки действия
Первый программный блок зеленой палитры предназначен для управления средним мотором, второй блок - для управления большим мотором. Так как параметры этих блоков идентичны - рассмотрим настройку на примере блока - большой мотор.

Рис. 3
Для правильной настройки блока управления большим мотором мы должны:
- Выбрать порт, к которому подключен мотор (A, B, C или D) (Рис. 3 поз. 1)
- Выбрать режим работы мотора (Рис. 3 поз. 2)
- Настроить параметры выбранного режима (Рис. 3 поз. 3)
Чем же отличаются режимы? Режим: "Включить" включает мотор с заданным параметром "Мощность" и после этого управление передается следующему программному блоку программы. Мотор будет продолжать вращаться, пока не будет остановлен следующим блоком "Большой мотор" с режимом "Выключить" или следующий блок "Большой мотор" не будет содержать другие параметры выполнения. Режим "Включить на количество секунд" включает большой мотор с установленной мощностью на указанное количество секунд, и только по завершению времени мотор остановится, а управление в программе перейдет к следующему программному блоку. Аналогично поведет мотор себя в режимах "Включить на количество градусов" и "Включить на количество оборотов": только после выполнения установленного вращения мотора, он остановится и управление в программе перейдет к следующему блоку.
Параметр мощность (на Рис. 3 мощность установлена в 75) может принимать значения от -100 до 100. Положительные значения мощности задают вращение мотора по часовой стрелке, отрицательные - против часовой. При значении мощности равном 0 мотор вращаться не будет, чем "выше" значение мощности, тем быстрее вращается мотор.
Параметр мощность задается только целыми значениями, параметры: секунды, градусы, обороты могут принимать значения с десятичной дробью. Но следует помнить, что минимальный шаг вращения мотора равен одному градусу.
Отдельно следует сказать о параметре "Тормозить в конце". Данный параметр, если установлен в значение "Тормозить" заставляет мотор тормозить после выполнения команды, а если установлен в значение "Двигаться накатом", то мотор будет вращаться по инерции, пока сам не остановится.
Следующие два программных блока "Рулевое управление" и "Независимое управление моторами" реализуют управление парой больших моторов. По умолчанию левый большой мотор подключается к порту "В", а правый - к порту "С". Но вы можете в настройках блока поменять порты подключения в соответствии с требованиями вашей конструкции (Рис. 4 поз. 1).

Рис. 4
Параметр "Рулевое управление" (Рис. 4 поз. 2) может принимать значения от -100 до 100. Отрицательные значения параметра заставляют робота поворачивать налево, при значении равном 0 робот движется прямо, а положительные значения заставляют робота поворачивать направо. Стрелка над числовым параметром меняет свою ориентацию в зависимости от значения, подсказывая тем самым направление движения робота (Рис. 5).

Рис. 5
Программный блок "Независимое управление моторами" похож на программный блок "Рулевое управление". Он также управляет двумя большими моторами, только вместо параметра "Рулевое управление" появляется возможность независимого управления мощностью каждого мотора. При равном значении параметра "Мощность" для левого и правого мотора робот будет двигаться прямолинейно. Если на один мотор подать отрицательное значение мощности (например -50), а на второй - положительное значение (например 50), то робот будет разворачиваться на месте (Рис. 6).

Рис. 6
Режимы работы этих блоков аналогичны режимам блока управления одним мотором, поэтому дополнительного описания не требуют.
2.3. Прямолинейное движение, повороты, разворот на месте остановка
Итак, теперь мы можем написать программу движения робота по какому-либо маршруту.
Задача 1: Проехать прямолинейно вперед на 4 оборота двигателя. Развернуться. Проехать на 720 градусов.
Решение (Рис. 7):
- Используя программный блок "Рулевое управление" проехать вперед на 4 оборота.
- Используя программный блок "Независимое управление моторами" развернуться на месте (значение градусов придется подобрать экспериментально).
- Используя программный блок "Рулевое управление" проехать вперед на 720 градусов.
Примечание: Почему при развороте пришлось подбирать значение градусов в блоке 2?. Разве не 360 градусов - искомая величина? Нет, если мы зададим значение параметра "Градусы" равным 360, то тем самым заставим на искомую величину провернуться валы левого и правого моторов нашего робота. На какой угол провернется робот вокруг своей оси - зависит от размера (диаметра) колес и расстояния между ними. На Рис. 7 значение параметра "Градусы" равно 385. Данное значение позволяет роботу, собранному по инструкции small-robot 45544 развернуться вокруг своей оси. Если у вас другой робот, то вам придется подобрать другое значение. Можно ли это значение найти математически? Можно, но об этом мы поговорим позднее.
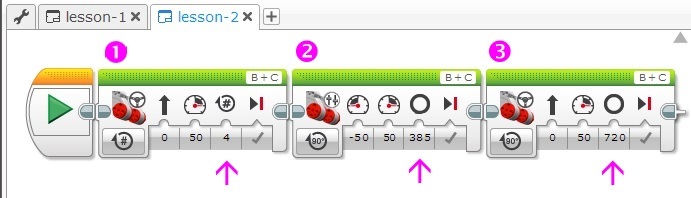
Рис. 7
Задача 2: Установите на ровной поверхности какое-либо препятствие (банку, кубик, небольшую коробку), отметьте место старта вашего робота. Создайте в проекте новую программу: lesson-2-2, позволяющую роботу объехать вокруг препятствия и вернуться к месту старта.
Сколько программных блоков вы использовали? Поделитесь своим успехом в комментарии к уроку.
2.4. Экран, звук, индикатор состояния модуля
Программный блок "Экран" позволяет выводить текстовую или графическую информацию на жидкокристаллический экран блока EV3. Какое это может иметь практическое применение? Во-первых, на этапе программирования и отладки программы можно выводить на экран текущие показания датчиков во время работы робота. Во-вторых, можно выводить на экран название промежуточных этапов выполнения программы. Ну а в-третьих, с помощью графических изображений можно "оживить" экран робота, например с помощью мультипликации.

Рис. 8
Программный блок "Экран" имеет четыре режима работы: режим "Текст" позволяет выводить текстовую строку на экран, режим "Фигуры" позволяет отображать на экране одну из четырех геометрических фигур (прямая, круг, прямоугольник, точка), режим "Изображение" может вывести на экран одно изображение. Изображение можно выбрать из богатой коллекции изображений или нарисовать свое, используя редактор изображений. Режим "Окно сброса настроек" сбрасывает экран модуля EV3 к стандартному информационному экрану, показываемому во время работы программы.

Рис. 9
Рассмотрим параметры программного блока "Экран" в режиме "Текст" (Рис. 9 поз.1). Строка, предназначенная для вывода на экран, вводится в специальное поле (Рис. 9 поз. 2). К сожалению, в поле ввода текста можно вводить только буквы латинского алфавита, цифры и знаки препинания. Если режим "Очистить экран" установлен в значение "Истина", то экран перед выводом информации будет очищен. Поэтому, если вам требуется объединить текущий вывод с информацией уже находящейся на экране, то установите этот режим в значение "Ложь". Режимы "X" и "Y" определяют точку на экране, с которой начинается вывод информации. Экран блока EV3 имеет 178 пикселей (точек) в ширину и 128 пикселей в высоту. Режим "X" может принимать значения от 0 до 177, режим "Y" может принимать значения от 0 до 127. Верхняя левая точка имеет координаты (0, 0), правая нижняя (177, 127)

Рис. 10
Во время настройки программного блока "Экран" можно включить режим предварительного просмотра (Рис. 9 поз. 3) и визуально оценить результат настроек вывода информации.
В режиме "Фигуры" (Рис. 11 поз. 1) настройки программного блока меняются в зависимости от типа фигуры. Так при отображении круга необходимо будет задать координаты "X" и "Y" центра окружности, а также значение "Радиуса". Параметр "Заполнить" (Рис. 11 поз. 2) отвечает за то, что будет отображен либо контур фигуры, либо внутренняя область фигуры будет заполнена цветом, заданным в параметре "Цвет" (Рис. 11 поз. 3).

Рис. 11
Для отображения прямой необходимо задать координаты двух крайних точек, между которыми располагается прямая.

Рис. 12
Чтобы отобразить прямоугольник следует задать координаты "X" и "Y" левого верхнего угла прямоугольника, а также его "Ширину" и "Высоту".
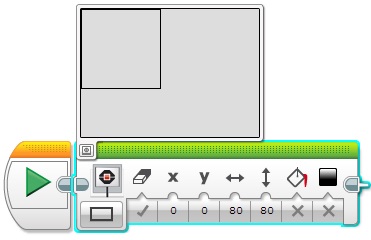
Рис. 13
Отобразить точку проще всего! Укажите лишь её координаты "X" и "Y".
Режим "Изображение", наверное, самый интересный и самый используемый режим. Он позволяет выводить на экран изображения. Среда программирования содержит огромную библиотеку изображений, отсортированную по категориям. В дополнение к имеющимся изображениям вы всегда можете создать свой рисунок и, вставив его в проект, вывести на экран. ("Главное меню среды программирования" - "Инструменты" - "Редактор изображения"). Создавая своё изображение, вы можете также вывести на экран символы русского алфавита.

Рис. 14
Как вы видите - отображению информации на экране главного модуля EV3 среда программирования придает огромное значение. Давайте рассмотрим следующий важный программный блок "Звук". С помощью этого блока мы можем выводить на встроенный динамик блока EV3 звуковые файлы, тона произвольной длительности и частоты, а также музыкальные ноты. Давайте рассмотрим настройки программного блока в режиме "Воспроизвести тон" (Рис. 15). В этом режиме необходимо задать "Частоту" тона (Рис. 15 поз. 1), "Продолжительность" звучания в секундах (Рис. 15 поз. 2), а также громкость звучания (Рис. 15 поз. 3).

Рис. 15
В режиме "Воспроизвести ноту" вам вместо частоты тона необходимо выбрать ноту на виртуальной клавиатуре, а также установить длительность звучания и громкость (Рис. 16).

Рис. 16
В режиме "Воспроизвести файл" вы можете выбрать один из звуковых файлов из библиотеки (Рис. 17 поз. 1), либо, подключив к компьютеру микрофон, с помощью Редактора звука ("Главное меню среды программирования" - "Инструменты" - "Редактор звука") записать собственный звуковой файл и включить его в проект.

Рис. 17
Давайте отдельно рассмотрим параметр "Тип воспроизведения" (Рис. 17 поз. 2), общий для всех режимов программного блока "Звук". Если данный параметр установлен в значение "Ожидать завершения", то управление следующему программному блоку будет передано только после полного воспроизведения звука или звукового файла. В случае установки одного из двух следующих значений начнется воспроизведение звука и управление в программе перейдет к следующему программному блоку, только звук или звуковой файл будет воспроизведен один раз или будет повторяться, пока не его не остановит другой программный блок "Звук".
Нам осталось познакомиться с последним программным блоком зеленой палитры - блоком "Индикатор состояния модуля". Вокруг кнопок управления модулем EV3 смонтирована цветовая индикация, которая может светиться одним из трех цветов: зеленым, оранжевым или красным. За включение - выключение цветовой индикации отвечает соответствующий режим (Рис. 18 поз. 1). Параметр "Цвет" задает цветовое оформление индикации (Рис. 18 поз. 2). Параметр "Импульсный" отвечает за включение - отключение режима мерцания цветовой индикации (Рис. 18 поз. 3). Как можно использовать цветовую индикацию? Например, можно во время различных режимов работы робота использовать различные цветовые сигналы. Это поможет понять: так ли выполняется программа, как мы запланировали.

Рис. 18
Давайте используем полученные знания на практике и немного "раскрасим" нашу программу из Задачи 1.
Задача 3:
- Воспроизвести сигнал "Start"
- Включить зеленую немигающую цветовую индикацию
- Отобразить на экране изображение "Forward"
- Проехать прямолинейно вперед на 4 оборота двигателя.
- Включить оранжевую мигающую цветовую индикацию
- Развернуться
- Включить зеленую мигающую цветовую индикацию
- Отобразить на экране изображение "Backward"
- Проехать на 720 градусов
- Воспроизвести сигнал "Stop"
Попробуйте решить задачу 3 самостоятельно, не подглядывая в решение! Удачи!
Программирование модуля EV3
Вопрос про программирование модуля EV3 без применения компьютера иногда встает перед многими любителями робототехники. Для этого на микрокомпьютер EV3 уже предустановлено программное обеспечение идентичное ПО установленному на микрокомпьютер.

Создать свою программу можно при помощи приложения модуля EV3 находящегося в окне приложений. Это третья вкладка интерфейса микроконтроллера EV3. Приложение называется Brick Program и является четвертым приложением по счету.
Дословно это переводится как кирпичная программа и является средой программирования модуля EV3. Зайти в это приложение можно после включения модуля при помощи кнопок управления модулем.
Среда программирования микрокомпьютера EV3
Если зайти в среду программирования микрокомпьютера EV3, то первое что мы увидим будет блок «Начало» и блок «Цикл». Между этими двумя блоками находится вертикально расположенная прерывистая линия, при помощи которой происходит добавление блоков из палитры блоков.

В палитре блоков расположены блоки двух типов:
- Блоки действия;
- Блоки ожидания.
Также в палитре блоков находится корзина для удаления ненужного блока из программы.
Блоки действия
Всего в палитре блоков находятся шесть блоков действия:

- Экран;
- Звук;
- Подсветка кнопок;
- Средний двигатель;
- Большой двигатель;
- Рулевое управление – в этом блоке используется два двигателя.
В правом верхнем углу каждого блока действия находится его указатель в виде маленькой стрелки. Блоки действия предназначены для выполнения какого-либо действия. Это может быть включение мотора, изменение цвета подсветки кнопок и прочее.
Блоки ожидания
Имеется одиннадцать блоков ожидания:

- Ожидание температуры;
- Ожидание показаний энкодера;
- Ожидание нажатия управляющей кнопки модуля EV3;
- Ожидание времени;
- Ожидание ультразвукового датчика;
- Ожидание инфракрасного датчика;
- Ожидание инфракрасного маяка;
- Ожидание датчика гироскопа;
- Ожидание датчика касания;
- Ожидание датчика освещенности;
- Ожидание датчика цвета.
В правом верхнем углу каждого блока ожидания находится его указатель в виде маленьких песочных часов. Блоки ожидания предназначены для ожидания наступления какого-либо события. Это может быть достижение нужных показаний датчиков, нажатие на кнопку и так далее.
Как создать программу на модуле EV3
Для того, чтобы на микрокомпьютере EV3 создать программу нужно найти в третьем окне интерфейса модуля приложение Brick Program. Нажав на центральную кнопку блока входим в приложение и видим блок начало и цикл. Между этими двумя блоками можно разместить всего шестнадцать различных блоков ожидания и блоков действия.

Поэтому при помощи интерфейса микроконтроллера EV3 можно писать только несложные программы. В блоках программирования есть возможность изменения одного параметра при помощи кнопок «Вверх» и «Вниз». Количество повторений выполнения программы задается в блоке «Цикл» и может принимать значения 1, 2, 3, 4, 5, 10 и бесконечность.
Пример простой программы микрокомпьютера EV3
Например, стоит задача движения робота с двумя большими моторами вперед пять секунд. Для этого мы выбираем при помощи прерывистой линии переходим в блоки действий и выбираем блок «Рулевое управление». Этот блок выглядит как сдвоенная вращающаяся передняя часть большого мотора. Нажатием на центральную кнопку подтверждаем выбор.

Блок рулевого управления устанавливается между блоком «Начало» и «Цикл». Повторным нажатием на центральную кнопку мы переходим в настройки блока, где нажатием на кнопки «Вверх» и «Вниз» можно изменять направление движения робота. По умолчанию у нас в блоке выбраны большие моторы в портах B и C. Также по умолчанию у нас стоит движение вперед.
Для того, чтобы робот ехал вперед пять секунд нужно добавить блок ожидания времени. Устанавливаем прерывистую стрелочку между блоком «Рулевое управление» и блоком «Цикл» и переходим при помощи кнопок управления модулем в палитру блоков ожидания. Находим блок ожидания времени, который выглядит как часы и выбираем. Нажатием средней кнопки подтверждаем выбор.

Блок «Ожидание времени» устанавливается после блока «Рулевое управление» перед блоком «Цикл». Повторное нажатие центральной кнопки на блоке «Ожидания времени» позволяет зайти в настройку времени. Стрелочками «Вверх» и «Вниз» выбираем значение пять секунд и нажатием на центральную кнопку подтверждаем выбор. В своей программе между блоками можно передвигаться при помощи кнопок «Влево» и «Вправо».
На всякий случай нужно проверить значение блока «Цикл» и при необходимости устанавливаем значение в единицу, для того, чтобы программа выполнилась только один раз. Чтобы запустить программу на выполнение переходим в блок «Начало» и нажимаем центральную кнопку. Робот движется вперед пять секунд, после чего останавливается. Программа выполнена.
Как сохранить программу модуля EV3
Для того, чтобы сохранить программу нужно перейти к значку «Сохранить», который находится внизу в левом дальнем конце программы. При нажатии значка откроется окно, где можно дать название программе. Также можно применить название по умолчанию. После этого нужно нажать на кнопку «OK».

Программа с этим названием будет сохранена в папке BrkProg SAVE. Эта папка расположена во втором окне интерфейса модуля EV3 выбор файла.
Как открыть программу модуля EV3
Над значком «Сохранить» находится значок «Открыть». Чтобы отрыть любую программу, которая существует в блоке нужно нажать на этот значок. После этого можно кнопками «Вверх» и «Вниз» выбрать программу. Нажатие на центральную кнопку откроет выбранную программу
Как удалить блок модуля EV3
Для того, чтобы удалить ненужный вам блок из программы необходимо выделить этот блок центральной кнопкой. После этого переходим в палитру блоков нажатием кнопки «Вверх». По палитре блоков нужно переместиться в нижний левый угол и найти значок «Мусорная корзина».

Выделяем значок и нажимаем центральную кнопку. Удаление ненужного блока произведено.