24. ЭпПеТ. Модель асинхронного двигателя. Принцип получения движущегося магнитного тока
Принцип действия асинхронной машины в самом общем виде состоит в следующем: неподвижный элемент машины — статор используется для создания движущегося с определенной скоростью магнитного поля, а в замкнутых проводящих контурах другого, подвижного элемента — ротора наводятся ЭДС, вызывающие протекание токов и образование сил (моментов) при их взаимодействии с магнитным полем. В результате наблюдается асинхронное движение ротора относительно поля, что и дало машинам такого типа название — асинхронные.
Статор обычно выполнен в виде нескольких расположенных в пазах катушек, а ротор или в виде “беличьей клетки” (короткозамкнутый ротор) или в виде нескольких катушек (фазный ротор), которые соединены между собой, выведены на кольца, расположенные на валу, и с помощью скользящих по ним щеток замыкаются на внешние цепи.
Несмотря на простоту физических явлений и материализующих их конструктивов полное математическое описание процессов в асинхронной машине весьма сложно из-за большого числа взаимосвязанных переменных, часто с нелинейной или температурной зависимостью, взаимодействующих в сложной, динамичной модели.
Поэтому, рассмотрим самую простую модель асинхронной машины, пригодную для объяснения основных явлений в асинхронном электроприводе.
Принцип получения движущегося магнитного поля
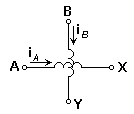
Пусть на статоре расположен виток (катушка) А-Х (рис. 4.1,а,б), по которому протекает переменный ток iA = Imsint; = 2f1. МДС FА, созданная этим током, будет пульсировать по оси витка
FА = Fmsint



в)
Рис. 4.1. К образованию вращающегося магнитного поля в машине
(горизонтальные штриховые стрелки на рис. 4.1,в). Если добавить виток (катушку) В-Y, расположенный под углом 90 0 к А-Х, и пропускать по нему ток iB = Imcost, то МДС FВ будет пульсировать по оси этого витка (вертикальные стрелки):
FВ = Fmcost
Вектор результирующей МДС имеет модуль

Его фаза определится из условия

Таким образом, вектор результирующей МДС при принятых условиях, т.е. при сдвиге двух витков в пространстве в  и при сдвиге токов во времени на
и при сдвиге токов во времени на , вращается с угловой скоростью
, вращается с угловой скоростью , где f1 — частота токов в витках.
, где f1 — частота токов в витках.

В общем случае для машины, имеющей р пар полюсов (р=1,2,3. ), синхронная угловая скорость , рад/с, т.е. скорость поля, определится как

(4.1)
для частоты вращения n0, об/мин, будем иметь:

(4.2)
т.е. при питании от сети f1=50Гц синхронная частота вращения может быть 3000, 1500, 1000, 750, 600. об/мин в зависимости от конструкции машины.
Выражения (4.1) и (4.2) позволяют сделать важный вывод: они показывают, что для асинхронной машины имеется лишь одна возможность изменять скорость поля — изменять частоту источника питания f1.
25. ЭпПеТ. Модель асинхронного двигателя (ад). Процессы в режиме хх и под нагрузкой: векторная диаграмма, параметр скольжения s, основные соотношения. Схема замещения
Пусть ротор вращается со скоростью ω0, т.е. его обмотки не пересекают силовых линий магнитного поля и он не оказывает существенного влияния на процессы.
В весьма грубом, но иногда полезном приближении можно представить обмотку фазы статора как некоторую идеальную катушку, к которой приложено переменное напряжение  . Мы будем дальше либо обозначать его и другие синусоидально изменяющиеся переменные соответствующими заглавными буквами, если интерес представляют лишь их действующие значения, либо будем добавлять точку вверху, показывая тем самым, что речь идет о временнóм векторе, имеющем амплитуду
. Мы будем дальше либо обозначать его и другие синусоидально изменяющиеся переменные соответствующими заглавными буквами, если интерес представляют лишь их действующие значения, либо будем добавлять точку вверху, показывая тем самым, что речь идет о временнóм векторе, имеющем амплитуду и фазу.
и фазу.
Очевидно, что приложенное напряжение  уравновесится ЭДС самоиндукции
уравновесится ЭДС самоиндукции  (рис. 4.2,а,б)
(рис. 4.2,а,б)

(4.3)
где w — число витков обмотки; kоб — коэффициент, зависящий от конкретного выполнения обмотки.


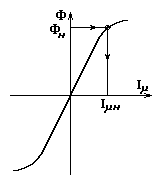
Рис. 4.2. Идеализированная модель асинхронной машины при = 0 (а), векторная диаграмма (б) и кривая намагничивания (в)
Можно приближённо считать, что магнитный поток определяется приложенным напряжением, частотой и параметрами обмотки:

(4.4)
Ток в обмотке (фазе) статора — ток намагничивания определится при этом лишь магнитным потоком и характеристикой намагничивания машины (рис. 4.2,в):

В серийных машинах при U1=U1н и f1=f1н, т.е. при номинальном магнитном потоке ток холостого хода I10 составляет обычно 30% — 40% от номинального тока статора I1н.
Асинхронные машины

Следовательно, КПД имеет максимум при такой нагрузке, при которой электрические потери в обмотках равны магнитным потерям в стали.
- Какие виды асинхронных машин вы знаете? Опишите их конструкцию.
С короткозамкнутым ротором и фазным ротором.
С короткозамкнутым: статор состоит из магнитопровода, трехфазной разноименнополюсной обмотки( активные элементы, предназначенные для образования вращающегося магнитного поля). Ротор состоит из магнитопровода, в пазах которого размещается неизолированная многофазная короткозамкнутая обмотка ( принимают участия в процессе преобразования энергии)
С фазным ротором: статор такой же, ротор состоит из вала, на котором с помощью нажимных колец, шпонки и разрезной шпонки укреплены в запрессованном состоянии пакеты магнитопровода.
- Поясните определение параметров схемы замещения асинхронных машин по опытным данным.

R2`1-s/s — дополнительное сопротивление может рассматриваться как сопротивление нагрузки трансформатора с приведенной вторичной обмоткой.
- Изменится ли угол сдвига фазы между током и эдс в обмотке ротора при езменении скольжения от 0 до 1? Поясните почему.
- Как изменится магнитный поток асинхронного двигателя при увеличении частоты питающей сети при постоянном напряжении?
- В каких случаях возможно применение способа пуска асинхронного двигателя при переключении схемы обмотки со звезды на треугольник?
- Почему вращающий момент асинхронного двигателя растет относительно быстрее, чем возрастает мощность на валу?
- Почему при введении активного сопротивления в цепь обмотки ротора пусковой ток уменьшается, а пусковой момент увеличивается?
- Что такой намагничивающий ток асинхронной машины? Где он протекает на схеме замещения и в реальной машине?
Под намагничивающим током понимается ток I0 в обмотке статора, который образует МДС, равную результирующей МДС F0m
- Напряжение на зажимах асинхронного двигателя уменьшили в 2 раза. Как изменится его максимальный магнитный момент?
Уменьшится в 4 раза.
- Изобразите векторную диаграмму асинхронной машины в двигательном режиме. Объясните порядок построения.

( из инета)
Иванов –смоленский стр 401
- Где больше магнитные потери – в неподвижном статоре или во вращающемся роторе? Почему?
Магнитные потери в статоре больше
- Назовите и объясните конструктивные меры улучшения формы кривой эдс трехфазной обмотки.
- Изобразите механическую характеристику асинхронной машины. Укажите скорости и скольжения в различных режимах работы.
в режиме двигателя 0 < s < l, Ω1 >Ω > 0;
в режиме генератора s < 0, Ω >Ω1;
в режиме тормоза s > 1, Ω < 0.
- В чем различия с энергетической точки зрения между генераторным и двигательным режимом работы асинхронной машины? Сравните энергетические диаграммы.
Генератор выдает мощность, двигатель потребляет

двигатель
- В каких случаях коэффициент распределения и укорочения обмотки переменного тока равен 1?
- Объясните конструкцию и работу асинхронного двигателя с глубокопазным ротором.
- Дайте пояснения физического смысла схемы замещения
R1 x1 – активное и реактивное сопротивления обмотки статора
R2 x2 – активное реактивное сопротивление обмотки ротора
Rm – активное сопротивление, обусловленное потерями в стали
xm – индуктивное сопротивление, обусловлено основным магнитным потоком
R2`1-s/s — дополнительное сопротивление может рассматриваться как сопротивление нагрузки трансформатора с приведенной вторичной обмоткой.
- От чего зависит величина, форма кривой и частота эдс обмотки машины переменного тока.
- Опишите принцип действия асинхронной машины.
-На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции наводит в них ЭДС. В стержнях ротора под действием наводимой ЭДС возникает ток. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора.
-Вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС 1 и 2. на проводник с током в магнитном поле действует сила, и в поле создается вращающий электромагнитны момент. Если этот момент больше момента нагрузки на валу, ротор приходит во вращение и вращается в ту же сторону , то и вращающееся магнитное поле, но с частотой вращения меньше, чем частота вращения поля. По этой причине машина называется асинхронной ( ротор и статор вращаются не синхронно)
- Как изменится пусковой момент при переключении обмотки статора со звезды в треугольник.
При переключения обмотки на треугольник двигатель получает возможность развивать полную скорость. Пусковой ток увеличивается при этом в 3 раза.
- Почему для двигателя с фазным ротором не применяется способ регулировки частоты вращения изменением числа полюсов?
- Как перевести асинхронную машину в генераторный режим? Почему асинхронный генератор не получил широкого распространения?
При повышении частоты вращения сверх частоты вращения холостого хода ( за счет приводного двигателя) асинхронная машина переходит в генераторный режим, последовательно покрывая механические и добавочные потери холостого хода, электрические ( холостого хода) и основные магнитные потери в статоре за счет механической мощности приводного двигателя. При этом ротор вращается быстрее магнитного поля.
- Как зависит электромагнитный момент АМ от напряжения, частоты питающей сети, реактивностей статора и ротора?
- Почему потери в стали ротора АМ практически можно считать равными 0?
В обычных асинхронных машинах магнитопровод ротора изготовлен из изолированных друг от друга листов электротехнической стали, обладающей небольшими гистерезисными потерями, моменты на гистерезисе и вихревых токах малы и при расчете механической характеристики могут не учитываться.
- Почему АД не приходит во вращение, если в сеть включена только одна фаза двигателя?
Однофазный асинхронный двигатель при подключении к сети не вращается из-за того, что при s=1 его магнитное поле имеет пульсирующий характер и не создает вращающего момента. Для того чтобы ротор привести во вращение, необходимо в машине при пуске получить вращающееся магнитное поле. Поэтому на период пуска однофазный двигатель превращают в двухфазный (на статоре размещают еще одну обмотку).
- Нарисуйте механическую характеристику асинхронной машины. Покажите на ней номинальный и пусковой момент.
Механическая характеристика двигателя представляет собой зависимость скорости вращения n1 от развиваемого момента на валу М2 при U1=const и f1=const. M=f(s), n=f (M2), M2=f(n).

- Поясните работу индукционного регулятора.
Трехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотка регулятора включается по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.

Рис. 12.2. Индукционный регулятор: а – схема соединения обмоток; б – векторная диаграмма напряжений

В качестве первичной обмотки обычно используют обмотку ротора (рис. 12.2); которую включают в трехфазную сеть.
Вторичной обмоткой  в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс
в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс  и
и  , которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора
, которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора  ; фаза эдс
; фаза эдс  неизменна, так как
неизменна, так как  . В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от
. В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от  до
до  (рис. 12.2, б).
(рис. 12.2, б).
Асинхронный двигатель, как двигатель регулируемой частоты.
Оценка двигателя при питании от сети фиксированной частоты применима и если синусоидальные напряжения любой другой частоты прикладываются к двигателю, при условии, что поток в воздушном зазоре остается на прежнем уровне. Это означает, что если такой двигатель питается от источника изменяемого напряжения и частоты, можно построить любое число комплектов кривых, аналогичных показанным на рис. 1 – по одному комплекту для каждой частоты. На рис. 2 показана типичная последовательность механических характеристик, которые получаются при питании двигателя от источника изменяемой частоты и напряжения (напряжение меняется прямо пропорционально частоте).
Важным является то, что всегда существует возможность работы в зоне справа от пикового момента, т.е. в области максимального КПД, соотношения M/I и устойчивости при любой требуемой скорости. При работе от такого источника питания двигатель всегда может работать при наиболее выгодных условиях (без высоких токов, низких моментов и КПД) при любых скоростях. При этом предполагается, что такой источник питания двигателя имеет природу, аналогичную промышленной сети, т.е. форма напряжения – синусоидальная, внутреннее сопротивление источника питания – мало. На практике большинство инверторных систем, как будет показано позже, не эквивалентны промышленной сети и возможности и способы работы инверторов могут не позволить использовать все потенциальные возможности двигателя.
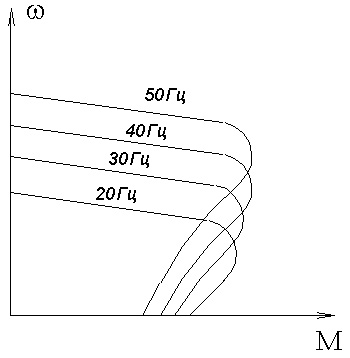
Рис. 2. Механические характеристики двигателя при различных частотах
Другим важным моментом является то, что большинство инверторных систем для асинхронных двигателей позволяют контролировать все параметры цепи, т.е.
могут быть изменены независимо друг от друга, для достижения оптимальной рабочей зоны.
Рассмотрим по очереди к чему приводит изменение каждой их этих величин.
Изменение частоты тока, подаваемого на двигатель, приведет к изменению скорости вращения вращающего поля статора и, следовательно, синхронной скорости двигателя. Т.к. момент создается за счет разности скоростей ротора и вращающего поля, скорость двигателя будет немного меньше, чем синхронная скорость. Тем не менее, подавая частоту, немного превышающую данную, возможно задать требуемую скорость вращения двигателя. Т.е. теперь возможно компенсировать незначительное падение скорости (относительно синхронной), присущее двигателям.
Т.е. теперь двигатель не ограничен частотой питающей сети в 50 Гц. Если механическая часть двигателя позволяет работать на более высоких скоростях, нет причины, ограничивающей бы эксплуатацию двигателя, например, на частоте 69.77 Гц.
Таким образом, теперь для двигателя, предназначенного для работы от сети, существует возможность полной реализации всех его потенциальных возможностей. Одно из ограничений возникающее при этом состоит в том, что охлаждение двигателя может быть недостаточным и, следовательно, двигатель может оказаться неспособным потреблять такие же токи и соответственно создавать момент, как при больших скоростях.
Дополнительное преимущество подключения двигателя к источнику изменяемой частоты состоит в том, что всегда есть возможность уменьшить частоту таким образом, чтобы вывести двигатель в генераторный режим и обеспечить торможение с рекуперацией энергии в инвертор. Т.е. пока инвертор способен поглощать энергию от двигателя и исполнительного механизма есть возможность полного управления процессом торможения.
Как и во всех индуктивных элементах электрических цепей, в обмотке статора асинхронного двигателя индуцируется напряжение (благодаря потоку в магнитопроводе), которое приблизительно равно по величине и противоположно по направлению прикладываемому напряжению. Токи протекают по обмотке благодаря разнице между прикладываемым и индуцируемым напряжением, ограниченные только сопротивлением обмотки. Таким образом, обмотка статора подчиняется обычным законам магнитных цепей, в соответствии с которыми индуцируемое напряжение пропорционально:
поток частота число витков
и, следовательно, если необходимо сохранить оптимальное и постоянное значение потока, напряжение необходимо изменять пропорционально частоте.
Тем не менее, как было сказано выше, это не всегда необходимо. Уровень напряжения, а, следовательно, поток могут быть легко изменены, при необходимости. Увеличение потока приведет к созданию большего момента, а единственным ограничением на увеличение потока являются большие потери в железе и больший ток намагничивания.
На первый взгляд, уменьшение потока уменьшением напряжения может быть полезным, но эффективно это используется лишь в двух целях.
Если значительные периоды времени двигатель эксплуатируется с незначительной нагрузкой, потери в железе можно значительно уменьшить, снизив поток. Наиболее частый случай, допускающий снижения потока, встречается при необходимости обеспечения высоких скоростей без увеличения напряжения выше номинального (чтобы не допустить пробоя изоляции). Эксплуатация двигателя на частотах, превышающих номинальную на 50%, может свободно достигаться при снижении потока.
Уменьшение подаваемого напряжения и потока также используется, как средство защиты двигателя. Если по какой-либо причине в двигателе протекают недопустимо высокие токи (например, при блокировке вала двигателя), то, благодаря возможности снижения напряжения, их можно избежать.
На рис.3 показаны основные зависимости, связанные с изменением потока. Из-за насыщения ток намагничивания должен увеличиваться на больший коэффициент, чем увеличивается поток. Создаваемый момент будет увеличиваться пропорционально потоку, если моментная составляющая тока поддерживается постоянной.
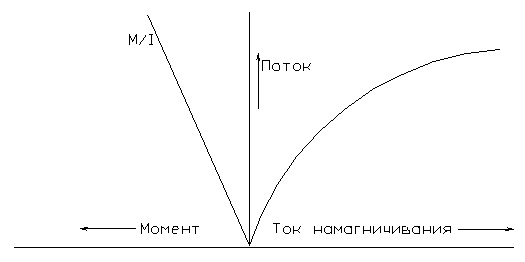
Рис. 3. Зависимости потока
Момент, развиваемый асинхронным двигателем, является результатом взаимодействия потока в воздушном зазоре и токов в проводниках ротора. При работе в зоне, близкой к синхронной скорости с низкими значениями скольжения значение коэффициента мощности велико и генерируемый момент практически пропорционален протекающему току. Поэтому управление током ротора обеспечивает прямое управление моментом двигателя при низких уровнях скольжения.
Ток статора содержит составляющую, эквивалентную току ротора, зависящую от коэффициента трансформации между ротором и статором, но он также содержит магнитную составляющую, вызывающую МДС и, следовательно, поток в магнитопроводе. Примем допущение, что скорость вращения ротора и токи, протекающие в нем, не влияют на магнитопровод и, следовательно, логично предположить, что требуемый ток намагничивания двигателя почти не зависит от скорости вращения, т.е. МДС, требуемая для создания номинального потока, одинакова, при какой бы скорости двигатель не вращался.
Тем не менее, действующее сопротивление магнитной цепи изменяется с изменением прикладываемой частоты и, как было сказано выше, если необходимо поддерживать постоянный ток намагничивания и поток, то необходимо изменять напряжение пропорционально частоте.
Поэтому, в общем случае, управление током асинхронного двигателя позволяет управлять уровнем создаваемого момента, пока сохраняется низкий уровень скольжения.
Что такое ток намагничивания асинхронного двигателя
Следовательно, КПД имеет максимум при такой нагрузке, при которой электрические потери в обмотках равны магнитным потерям в стали.
Какие виды асинхронных машин вы знаете? Опишите их конструкцию.
С короткозамкнутым ротором и фазным ротором.
С короткозамкнутым: статор состоит из магнитопровода, трехфазной разноименнополюсной обмотки( активные элементы, предназначенные для образования вращающегося магнитного поля). Ротор состоит из магнитопровода, в пазах которого размещается неизолированная многофазная короткозамкнутая обмотка ( принимают участия в процессе преобразования энергии)
С фазным ротором: статор такой же, ротор состоит из вала, на котором с помощью нажимных колец, шпонки и разрезной шпонки укреплены в запрессованном состоянии пакеты магнитопровода.
Поясните определение параметров схемы замещения асинхронных машин по опытным данным.
R2`1-s/s — дополнительное сопротивление может рассматриваться как сопротивление нагрузки трансформатора с приведенной вторичной обмоткой.
Изменится ли угол сдвига фазы между током и эдс в обмотке ротора при езменении скольжения от 0 до 1? Поясните почему.
Как изменится магнитный поток асинхронного двигателя при увеличении частоты питающей сети при постоянном напряжении?
В каких случаях возможно применение способа пуска асинхронного двигателя при переключении схемы обмотки со звезды на треугольник?
Почему вращающий момент асинхронного двигателя растет относительно быстрее, чем возрастает мощность на валу?
Почему при введении активного сопротивления в цепь обмотки ротора пусковой ток уменьшается, а пусковой момент увеличивается?
Что такой намагничивающий ток асинхронной машины? Где он протекает на схеме замещения и в реальной машине?
Под намагничивающим током понимается ток I0 в обмотке статора, который образует МДС, равную результирующей МДС F0m
Напряжение на зажимах асинхронного двигателя уменьшили в 2 раза. Как изменится его максимальный магнитный момент?
Уменьшится в 4 раза.
Изобразите векторную диаграмму асинхронной машины в двигательном режиме. Объясните порядок построения.
( из инета)
Иванов –смоленский стр 401
Где больше магнитные потери – в неподвижном статоре или во вращающемся роторе? Почему?
Магнитные потери в статоре больше
Назовите и объясните конструктивные меры улучшения формы кривой эдс трехфазной обмотки.
Изобразите механическую характеристику асинхронной машины. Укажите скорости и скольжения в различных режимах работы.
в режиме двигателя 0 < s < l, Ω1 >Ω > 0;
в режиме генератора s < 0, Ω >Ω1;
в режиме тормоза s > 1, Ω < 0.
В чем различия с энергетической точки зрения между генераторным и двигательным режимом работы асинхронной машины? Сравните энергетические диаграммы.
Генератор выдает мощность, двигатель потребляет
двигатель
В каких случаях коэффициент распределения и укорочения обмотки переменного тока равен 1?
Объясните конструкцию и работу асинхронного двигателя с глубокопазным ротором.
Дайте пояснения физического смысла схемы замещения
R1 x1 – активное и реактивное сопротивления обмотки статора
R2 x2 – активное реактивное сопротивление обмотки ротора
Rm – активное сопротивление, обусловленное потерями в стали
xm – индуктивное сопротивление, обусловлено основным магнитным потоком
R2`1-s/s — дополнительное сопротивление может рассматриваться как сопротивление нагрузки трансформатора с приведенной вторичной обмоткой.
От чего зависит величина, форма кривой и частота эдс обмотки машины переменного тока.
Опишите принцип действия асинхронной машины.
-На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции наводит в них ЭДС. В стержнях ротора под действием наводимой ЭДС возникает ток. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора.
-Вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС 1 и 2. на проводник с током в магнитном поле действует сила, и в поле создается вращающий электромагнитны момент. Если этот момент больше момента нагрузки на валу, ротор приходит во вращение и вращается в ту же сторону , то и вращающееся магнитное поле, но с частотой вращения меньше, чем частота вращения поля. По этой причине машина называется асинхронной ( ротор и статор вращаются не синхронно)
Как изменится пусковой момент при переключении обмотки статора со звезды в треугольник.
При переключения обмотки на треугольник двигатель получает возможность развивать полную скорость. Пусковой ток увеличивается при этом в 3 раза.
Почему для двигателя с фазным ротором не применяется способ регулировки частоты вращения изменением числа полюсов?
Как перевести асинхронную машину в генераторный режим? Почему асинхронный генератор не получил широкого распространения?
При повышении частоты вращения сверх частоты вращения холостого хода ( за счет приводного двигателя) асинхронная машина переходит в генераторный режим, последовательно покрывая механические и добавочные потери холостого хода, электрические ( холостого хода) и основные магнитные потери в статоре за счет механической мощности приводного двигателя. При этом ротор вращается быстрее магнитного поля.
Как зависит электромагнитный момент АМ от напряжения, частоты питающей сети, реактивностей статора и ротора?
Почему потери в стали ротора АМ практически можно считать равными 0?
В обычных асинхронных машинах магнитопровод ротора изготовлен из изолированных друг от друга листов электротехнической стали, обладающей небольшими гистерезисными потерями, моменты на гистерезисе и вихревых токах малы и при расчете механической характеристики могут не учитываться.
Почему АД не приходит во вращение, если в сеть включена только одна фаза двигателя?
Однофазный асинхронный двигатель при подключении к сети не вращается из-за того, что при s=1 его магнитное поле имеет пульсирующий характер и не создает вращающего момента. Для того чтобы ротор привести во вращение, необходимо в машине при пуске получить вращающееся магнитное поле. Поэтому на период пуска однофазный двигатель превращают в двухфазный (на статоре размещают еще одну обмотку).
Нарисуйте механическую характеристику асинхронной машины. Покажите на ней номинальный и пусковой момент.
Механическая характеристика двигателя представляет собой зависимость скорости вращения n1 от развиваемого момента на валу М2 при U1=const и f1=const. M=f(s), n=f (M2), M2=f(n).
Поясните работу индукционного регулятора.
Трехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотка регулятора включается по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
Рис. 12.2. Индукционный регулятор: а – схема соединения обмоток; б – векторная диаграмма напряжений
В качестве первичной обмотки обычно используют обмотку ротора (рис. 12.2); которую включают в трехфазную сеть.
Вторичной обмоткой в этом случае является статорная обмотка, которая включается в сеть последовательно с нагрузкой. Вращающееся магнитное поле индуктирует в обмотках статора и ротора эдс и , которые суммируются геометрически и подаются на зажимы нагрузки. При повороте ротора будет изменяться взаимное положение осей одноименных фаз статора и ротора и, следовательно, будет изменяться фаза эдс ротора ; фаза эдс неизменна, так как . В соответствии с этим выходное напряжение автотрансформатора будет изменяться плавно от до (рис. 12.2, б).
Намагничивание двигателя при нулевой скорости вращения
В современных преобразователях частоты Danfoss имеется возможность автоматического регулирования следующих параметров:
- пуск и компенсация скольжения
- пусковое напряжение
Компенсационные параметры выполняют оптимальное намагничивание, что дает максимальный крутящий момент как во время пуска, так и постоянно — от начальной скорости до полной номинальной скорости двигателя.
В случае когда мощность двигателя меньше, чем мощность двигателя необходимого для реализуемой задачи, может потребоваться дополнительное напряжение, чтобы создать момент трогания или создать нужное намагничивание в диапазоне малых скоростей.
На рис.1 изображена вольт-частотная характеристика управления электродвигателем:
При возникновении тяжелых запусков (транспортеры, дробилки) необходимо дополнительное пусковое напряжение U0. При нагрузке в диапазоне малых скоростей (f
Чтобы сохранить магнитный поток, падение напряжения нужно компенсировать. Увеличение напряжения может привезти к следующим результатам:
Явления в асинхронной машине при неподвижном роторе

Физическая сущность явлений в асинхронной машине и трансформаторе имеет много общего, поэтому целесообразно начать изучение асинхронных машин с трансформаторного режима при неподвижном роторе ().

Рассмотрим явления в трехфазной асинхронной машине, полагая, что все величины являются синусоидальными функциями времени, а магнитное поле в воздушном зазоре распределено по гармоническому закону. Высшими пространственными гармониками поля пренебрегаем. Обмотку ротора будем считать фазной. Пусть вначале обмотка ротора разомкнута, а обмотка статора включена в сеть на напряжение (рис. 4.3, а).
Симметричная система токов  , протекающих по фазам обмотки статора под действием приложенного напряжения , создает основную гармонику МДС с амплитудой
, протекающих по фазам обмотки статора под действием приложенного напряжения , создает основную гармонику МДС с амплитудой

.

Под действием этой МДС в машине образуется магнитный поток, который обычно разделяют на основной поток Ф, сцепленный с обмотками статора и ротора, и поток рассеяния , сцепленный только с обмоткой статора,

.
Основной магнитный поток наводит в обмотках статора и ротора ЭДС

;

.
Для удобства дальнейшего анализа обмотку ротора приведем к обмотке статора. Приведенные величины, как и в трансформаторе, будем обозначать символами со штрихами. Коэффициент приведения по напряжению определяется как отношение ЭДС  и
и  :
:

.

Появление в формуле для отношения обмоточных коэффициентов обусловлено характером образования магнитного поля в асинхронной машине. В отличие от трансформатора первая гармоника магнитного поля асинхронной машины зависит от конструкции обмотки.

ЭДС и  можно также выразить через ток , используя комплексную форму записи величин
можно также выразить через ток , используя комплексную форму записи величин

,
где  — сопротивление намагничивающего контура;
— сопротивление намагничивающего контура;  ,
,  — активная и реактивная составляющие сопротивления намагничивающего контура.
— активная и реактивная составляющие сопротивления намагничивающего контура.
В обмотке статора кроме ЭДС существует еще ЭДС  от потока рассеяния
от потока рассеяния  . Действующее значение этой ЭДС представляется комплексом
. Действующее значение этой ЭДС представляется комплексом

,

где — индуктивное сопротивление рассеяния обмотки статора.
Напряжения, ЭДС и токи фаз обмоток статора и ротора должны удовлетворять уравнениям, которые в комплексной форме записываются аналогично уравнениям трансформатора


(4.1)
Выражая ЭДС  ,
,  и
и  через ток
через ток  , получим
, получим

(4.2)

где .

Этим уравнениям соответствует схема замещения асинхронной машины с неподвижной и разомкнутой обмоткой ротора (рис. 4.4). Данная схема аналогична схеме замещения трансформатора на холостом ходу. Отличие состоит лишь в соотношении параметров. Наличие воздушного зазора в машине приводит к существенному снижению реактивной составляющей сопротивления намагничивающего контура  и, следовательно, к увеличению тока намагничивания. В асинхронных машинах ток намагничивания составляет 20-50% от номинального тока, а в трансформаторе он на порядок меньше. По уравнениям (4.1) можно построить также векторную диаграмму, задав напряжение вектора ЭДС (рис. 4.5). Если совместить эту диаграмму с пространственной диаграммой, то можно получить мгновенные значения фазных напряжений ЭДС и токов, проецируя вращающиеся с угловой скоростью
и, следовательно, к увеличению тока намагничивания. В асинхронных машинах ток намагничивания составляет 20-50% от номинального тока, а в трансформаторе он на порядок меньше. По уравнениям (4.1) можно построить также векторную диаграмму, задав напряжение вектора ЭДС (рис. 4.5). Если совместить эту диаграмму с пространственной диаграммой, то можно получить мгновенные значения фазных напряжений ЭДС и токов, проецируя вращающиеся с угловой скоростью  векторы
векторы  , и на неподвижные оси АВС.
, и на неподвижные оси АВС.
Рассмотрим теперь процессы в асинхронной машине с неподвижным ротором и короткозамкнутой обмоткой ротора (рис. 4.6, а).
При включении обмотки статора на напряжение  фазные токи
фазные токи  создают основную гармонику МДС
создают основную гармонику МДС  с амплитудой
с амплитудой

.
Токи ротора  , направленные, в соответствии с правилом Ленца, навстречу токам
, направленные, в соответствии с правилом Ленца, навстречу токам  , создадут основную гармонику МДС
, создадут основную гармонику МДС  с амплитудой
с амплитудой

.

Число фаз обмотки ротора  в общем случае не равно числу фаз обмотки статора
в общем случае не равно числу фаз обмотки статора  . МДС и
. МДС и  образуют результирующую МДС
образуют результирующую МДС  , которая создает основной магнитный поток
, которая создает основной магнитный поток  , сцепленный с обеими обмотками.
, сцепленный с обеими обмотками.
Связь между этими МДС в комплексной форме определяется уравнением

.
Выражая МДС через соответствующие токи, получим

,

где — ток намагничивания, протекающий по обмотке статора.
Отсюда находим выражение для тока намагничивания :


, (4.3)

где — коэффициент приведения обмотки ротора к обмотке статора по току.
Полученное уравнение называется уравнением токов.

Ток намагничивания по определению создает в машине основной магнитный поток Ф, который, сцепляясь с обмотками статора и ротора, наводит в них ЭДС

Кроме основного потока в машине существуют также потоки рассеяния  и
и  (рис. 4.6, б). Каждый из этих потоков сцепляется только со своей обмоткой и наводит в ней ЭДС рассеяния
(рис. 4.6, б). Каждый из этих потоков сцепляется только со своей обмоткой и наводит в ней ЭДС рассеяния  и
и  соответственно.
соответственно.
Действующие значения этих ЭДС можно выразить через соответствующие токи в комплексной форме:

С целью упрощения дальнейшего анализа выполним приведение обмотки ротора к обмотке статора, используя соотношения
 и
и  .
.
После приведения получаем
 ;
;  ,
,
где  — приведенное значение индуктивного сопротивления рассеяния обмотки ротора;
— приведенное значение индуктивного сопротивления рассеяния обмотки ротора;  — коэффициент приведения обмотки ротора к обмотке статора по сопротивлению.
— коэффициент приведения обмотки ротора к обмотке статора по сопротивлению.
В соответствии со вторым законом Кирхгофа напряжения, ЭДС и токи обмотки статора и ротора должны удовлетворять уравнениям

(4.4)


где — приведенное значение активного сопротивления обмотки ротора.
Уравнения напряжений (4.4) совместно с уравнением тока (4.3) образуют полную систему уравнений асинхронной машины для анализа установившихся режимов.
Уравнения показывают, что асинхронную машину можно заменить Т-образной схемой замещения (рис. 4.7), аналогичной схеме замещения трансформатора в режиме короткого замыкания.
Таким образом, при неподвижном роторе асинхронная машина работает как трансформатор, в котором электрическая энергия статора за вычетом потерь переходит в ротор, где, не совершая никакой полезной работы, превращается в тепло.
4.3. Явления в асинхронной машине при вращающемся роторе.
Замена вращающегося ротора неподвижным
При вращении ротора основной магнитный поток вращается относительно ротора с частотой

,
пропорциональной скольжению, поэтому частота наведенной в обмотке ротора ЭДС также будет пропорциональна скольжению:

.
Действующее значение этой ЭДС определяется выражением

,

где — ЭДС, наведенная в обмотке неподвижного ротора.
Индуктивное сопротивление рассеяния обмотки вращающегося ротора также будет пропорционально скольжению:

,

где — индуктивное сопротивление рассеяния неподвижного ротора.
Зависимость активного сопротивления обмотки ротора от частоты  носит более сложный характер (см. п. 4.10). При данном рассмотрении эта зависимость не имеет принципиального значения, поэтому примем
носит более сложный характер (см. п. 4.10). При данном рассмотрении эта зависимость не имеет принципиального значения, поэтому примем  .
.
С учетом сделанных замечаний уравнение напряжений вращающегося ротора будет иметь вид

.
Отсюда ток ротора

. (4.5)
Частота этого тока так же, как и частота ЭДС  , пропорциональна скольжению. Это обстоятельство существенно затрудняет анализ процессов в асинхронной машине, так как оказывается невозможным совместить электрические цепи статора и ротора. Однако эта проблема может быть снята, если заменить вращающийся ротор неподвижным. Возможность такой замены обусловлена тем, что поле ротора вращается синхронно с полем статора, образуя с ним общее поле машины. Действительно, МДС
, пропорциональна скольжению. Это обстоятельство существенно затрудняет анализ процессов в асинхронной машине, так как оказывается невозможным совместить электрические цепи статора и ротора. Однако эта проблема может быть снята, если заменить вращающийся ротор неподвижным. Возможность такой замены обусловлена тем, что поле ротора вращается синхронно с полем статора, образуя с ним общее поле машины. Действительно, МДС  вращается относительно ротора с частотой скольжения
вращается относительно ротора с частотой скольжения  , а сам ротор вращается с частотой
, а сам ротор вращается с частотой  , поэтому частота вращения МДС по отношению к статору равна синхронной
, поэтому частота вращения МДС по отношению к статору равна синхронной

.
Таким образом, вращение ротора приводит к изменению частоты ЭДС и тока в обмотке ротора, но не влияет на характер взаимодействия полей статора и ротора. Результат этого взаимодействия останется неизменным, если ротор затормозить, а действующее значение тока ротора  оставить прежним, изменив его частоту с
оставить прежним, изменив его частоту с  на
на  . Для выполнения такой замены достаточно в выражении (4.5) поделить числитель и знаменатель на s:
. Для выполнения такой замены достаточно в выражении (4.5) поделить числитель и знаменатель на s:

. (4.6)

Согласно этому выражению ток можно рассматривать как ток неподвижного ротора, активное сопротивление которого изменяется обратно пропорционально скольжению s реально вращающегося ротора.
4.4. Уравнения, схема замещения и векторная диаграмма
асинхронной машины
После замены вращающегося ротора неподвижным анализ установившихся процессов в асинхронной машине можно выполнить с помощью полученных ранее уравнений (4.4) и (4.3), если вместо сопротивления  ввести в роторную цепь сопротивление
ввести в роторную цепь сопротивление  :
:


Сопротивление можно представить следующим образом:

.
Тогда уравнения установившегося режима асинхронной машины примут вид

(4.7)


Уравнениям (4.7) соответствует Т-образная схема замещения асинхронной машины (рис. 4.8). В этой схеме сопротивление эквивалентно активной нагрузке трансформатора, а в асинхронной машине оно соответствует механической мощности, развиваемой ротором,

,

где М — электромагнитный момент; — электромагнитная мощность.
В асинхронной машине с неподвижным ротором электромеханического преобразования энергии не происходит, поэтому вся электромагнитная мощность превращается в электрическую мощность, выделяющуюся в виде тепла в сопротивлении  ,
,

.
В реальной вращающейся асинхронной машине в теплоту превращается только часть электромагнитной мощности, определяемая мощностью потерь,

,
а остальная мощность определяет механическую мощность, развиваемую ротором,

.

Параметры схемы замещения обычно записывают в относительных единицах. Для наиболее распространенных асинхронных двигателей мощностью от 3 до 100 кВт они имеют следующие значения:

;

;

;

.
На основе системы уравнений (4.7) можно построить векторную диаграмму, наглядно иллюстрирующую взаимосвязи в асинхронной машине в рабочих режимах. На рис. 4.9 представлена векторная диаграмма асинхронной машины в режиме двигателя. Она аналогична векторной диаграмме трансформатора, работающего на чисто активную нагрузку. Отличие состоит в относительно большей величине намагничивающего тока  (см. п. 4.2) и в ином физическом толковании вектора Ф. В асинхронной машине — это пространственная функция, распределенная по гармоническому закону и вращающаяся с синхронной частотой, а в трансформаторе поток Ф — это гармоническая функция времени, представленная на комплексной плоскости изображающим вектором
(см. п. 4.2) и в ином физическом толковании вектора Ф. В асинхронной машине — это пространственная функция, распределенная по гармоническому закону и вращающаяся с синхронной частотой, а в трансформаторе поток Ф — это гармоническая функция времени, представленная на комплексной плоскости изображающим вектором  .
.
Электропривод с двигателями переменного тока
Асинхронные двигатели созданы в Германии русским электротехником Доливо-Добровольским М. О. в 1888-1889 годах. Получили наибольшее распространение в промышленности благодаря ряду существенных преимуществ по сравнению с другими двигателями. Асинхронный двигатель прост и надежен в эксплуатации, так как не имеет коллектора, на его изготовление требуется меньше цветных металлов, он имеет меньшую массу, габариты и стоимость по сравнению с двигателями той же мощности переменного или постоянного тока, наконец, он выпускается серийно в широком диапазоне мощностей.
Схема включения, электромеханические и механические характеристики асинхронных двигателей
Наиболее распространенными типами нерегулируемых электроприводов являются электроприводы с короткозамкнутыми асинхронными двигателями. Для нерегулируемых электроприводов характерен пуск электродвигателя прямым включением в сеть с помощью контактной аппаратуры без промежуточных преобразователей электрической энергии.
Стандартная схема силовых цепей включения короткозамкнутого асинхронного двигателя с помощью контактов пускателя приведена на рис. 5.1.

Рис. 5.1. Схема включения короткозамкнутого асинхронного двигателя с использованием контактного пускателя
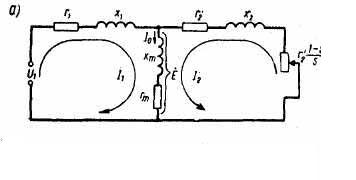
Для расчета характеристик асинхронного двигателя, как правило, пользуются его математической моделью, которая в общем случае представляется различными схемами замещения. Наиболее простой и удобной для инженерных расчетов асинхронного двигателя является Т-образная схема замещения (см. рис. 5.2).
На рис. 5.2 приняты следующие обозначения:

– фазное напряжение обмотки статора;

– активное сопротивление обмотки статора;

– индуктивное сопротивление рассеяния обмотки статора;

– ток обмотки статора;

– ЭДС обмотки статора;

– активное сопротивление обмотки ротора, приведенное к обмотке статора;

– индуктивное сопротивление рассеяния обмотки ротора, приведенное к обмотке статора;

– ток обмотки ротора, приведенный к обмотке статора;

– скольжение;

– синхронная угловая скорость;

– угловая скорость асинхронного двигателя;

– число пар полюсов;

– значение частоты напряжения переменного тока, подводимого к обмотке статора;

– ЭДС от главного магнитного потока машины;

– ЭДС обмотки ротора, приведенная к обмотке статора.

Рис. 5.2. Схема замещения асинхронного двигателя
Основные уравнения асинхронного двигателя, соответствующие принятой схеме замещения:

(5.1)
Векторная диаграмма токов, ЭДС и напряжений, удовлетворяющая системе уравнений (5.1), изображена на рис. 5.3.

Рис. 5.3. Векторная диаграмма асинхронного двигателя

Ток ротора, приведенный к обмотке статора асинхронного двигателя, определяется зависимостью, получаемой непосредственно из схемы замещения асинхронного двигателя:

(5.2)

где – индуктивное сопротивление короткого замыкания.

Уравнениеназывается электромеханической характеристикой асинхронного двигателя.
Для короткозамкнутого асинхронного двигателя представляет интерес другая электромеханическая характеристика , отражающая зависимость тока статора
, отражающая зависимость тока статора от скольжения s. Ток статора
от скольжения s. Ток статора определяется путем сложения вектора тока намагничивания
определяется путем сложения вектора тока намагничивания и вектора тока ротора
и вектора тока ротора (рис. 5.3)
(рис. 5.3)

(5.3)
Полагая ток намагничивания асинхронного двигателя реактивным, ток статора
реактивным, ток статора через приведенный ток ротора
через приведенный ток ротора можно найти по формуле [5]
можно найти по формуле [5]

(5.4)

где (5.5)
Основной выходной координатой силового привода является электромагнитный момент, значение которого для асинхронного двигателя может быть найдено из уравнения потерь

(5.6)

где – число фаз статора.

Подставив в (5.6) выражение токаиз (5.2) и решив полученное уравнение относительно момента М, будем иметь

(5.7)

Анализ уравнения (5.7) показывает, что механическая характеристика асинхронного двигателя имеет критический момент и критическое скольжение, которые находятся при условии Тогда критический момент

(5.8)

(5.9)
Знак «+» означает, что критический момент и скольжение относятся к двигательному режиму, знак «−» – к генераторному режиму рекуперативного торможения.
Уравнение механической характеристики асинхронного двигателя (5.7) можно преобразовать к более удобному для пользования выражению – формуле Клосса:

(5.10)

где – коэффициент.
Двигатели средней и большой мощности имеют малое активное сопротивление R1, в этом случае коэффициентом а можно пренебречь, а выражение (1.9) преобразуется в упрощенную формулу Клосса:

(5.11)
Задаваясь скольжением s, можно по (5.10) и (5.2) построить, соответственно, механические и электромеханические характеристики асинхронного двигателя, которые представлены на рис. 5.4.

Рис. 5.4. Статические характеристики асинхронного двигателя: а – механическая; б – электромеханическая
При скольжениях асинхронная машина работает в двигательном режиме, при
асинхронная машина работает в двигательном режиме, при  – в генераторном режиме параллельно с сетью (рекуперативное торможение), при
– в генераторном режиме параллельно с сетью (рекуперативное торможение), при  – в генераторном режиме последовательно с сетью или в режиме торможения противовключением.
– в генераторном режиме последовательно с сетью или в режиме торможения противовключением.
Механические характеристики, приведенные на рис 5.4, а, имеют в двигательном режиме три характерные точки:
- 1)
 , при этом скорость двигателя равна синхронной
, при этом скорость двигателя равна синхронной 
- 2)
 , что соответствует точке с критическим скольжением
, что соответствует точке с критическим скольжением и критическим моментом двигательного режима;
и критическим моментом двигательного режима; - 3)
 , при этом скорость двигателя будет равна нулю, а момент равен пусковому
, при этом скорость двигателя будет равна нулю, а момент равен пусковому
Электромеханические характеристики, приведенные на рис 5.4, б, имеют две характерные точки в двигательном режиме:
- 1)
 при этом скороегь двигателя равна синхронной
при этом скороегь двигателя равна синхронной 
- 2)
 , при этом скорость двигателя будет равна нулю, а ток ротора – току короткого замыкания (
, при этом скорость двигателя будет равна нулю, а ток ротора – току короткого замыкания ( ).
).
Механические и электромеханические характеристики асинхронного двигателя не совпадают, даже построенные в безразмерных единицах.
Различают естественную и искусственные механические характеристики асинхронного двигателя.

Под естественной механической характеристикой асинхронного двигателя будем понимать зависимость момента двигателя М от его скольжения 5 при номинальной схеме включения двигателя, номинальных параметрах питающей сети () и отсутствии добавочных сопротивлений в цепях двигателя. Все остальные характеристики называются искусственными. С помощью искусственных характеристик асинхронного двигателя регулируют его скорость в соответствии с требованиями технологического процесса.
Как следует из уравнения механической характеристики асинхронного двигателя (5.7), регулировать его скорость можно, изменяя один или несколько параметров:

– фазное напряжение обмоток статора двигателя;

– добавочное активное сопротивление статора;

– добавочное индуктивное сопротивление статора;

– добавочное активное сопротивление ротора, приведенное к обмотке статора;

– добавочное индуктивное сопротивление ротора, приведенное к обмотке статора;
 – синхронную угловую скорость изменением числа пар полюсов
– синхронную угловую скорость изменением числа пар полюсов или частоты
или частоты напряжения переменного тока, подводимого к обмотке статора.
напряжения переменного тока, подводимого к обмотке статора.
Из всего многообразия искусственных механических характеристик асинхронного двигателя практический интерес в настоящее время могут представлять только следующие способы регулирования:
- • регулирование скорости изменением добавочного активного сопротивления в цепи обмотки ротора асинхронного двигателя с фазным ротором;
- • регулирование скорости изменением фазного напряжения коротко- замкнутого асинхронного двигателя;
- • частотное регулирование скорости короткозамкнутого асинхронного двигателя.
Статические механические и электромеханические характеристики асинхронных двигателей благоприятны для пусков двигателей прямым включением в сеть. Поскольку пуск двигателя происходит достаточно быстро, то кратковременная перегрузка по току даже в 6-8 раз нс опасна для него ни с точки зрения больших ударных динамических моментов, ни с точки зрения больших пусковых токов, которые много меньше пусковых токов естественной характеристики двигателей постоянного тока независимого возбуждения той же мощности. Ограничения на прямой пуск асинхронных двигателей накладываются не самим двигателем, а питающей сетью.
Если сеть имеет ограниченную мощность или большое внутреннее сопротивление, то пусковые токи двигателя будут вызывать в этой сети большие падения напряжения. Естественно, что это скажется на режимах работы других потребителей энергии. По правилам Ростехнадзора напрямую можно запускать асинхронные двигатели, если их мощность

(5.12)

где – мощность питающего трансформатора подстанции в том случае, если от сети не питается осветительная аппаратура.
При питании осветительной аппаратуры от общей сети асинхронный двигатель можно пускать прямым включением в сеть, когда

(5.13)
Если условия (5.12) и (5.13) не выполняются, то способы токоограничения вытекают из уравнения тока короткого замыкания асинхронного двигателя.
Похожие публикации:
- 1 1 3 как называется закон
- Сколько стоит 1кг гвоздей
- Телефон как проектор через камеру
- Как сделать самодельную флешку