ПИД регуляторы: простое объяснение, основные компоненты и примеры применения
В этой статье я объясню, что такое пропорционально-интегрально-дифференциальные (ПИД) регуляторы, как они работают и где их можно применить, а также дам рекомендации по их настройке.
ПИД регуляторы: простое объяснение, основные компоненты и примеры применения обновлено: 11 ноября, 2023 автором: Научные Статьи.Ру
Помощь в написании работы
Введение
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы являются одним из основных инструментов в области автоматического управления. Они широко применяются в различных системах, таких как промышленные процессы, робототехника, электроника и другие. ПИД регуляторы позволяют поддерживать заданное значение выходной величины путем регулирования входного сигнала. В данной статье мы рассмотрим основные компоненты ПИД регулятора, принципы их работы, а также преимущества и недостатки данного типа регуляторов.
Нужна помощь в написании работы?
Мы — биржа профессиональных авторов (преподавателей и доцентов вузов). Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим бесплатно.
Что такое пропорционально-интегрально-дифференциальные (ПИД) регуляторы
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы являются одним из наиболее распространенных типов регуляторов, используемых в системах автоматического управления. Они представляют собой комбинацию трех основных составляющих: пропорциональной, интегральной и дифференциальной.
Пропорциональная составляющая регулятора пропорционально реагирует на разницу между желаемым значением и текущим значением измеряемой величины. Чем больше разница, тем больше будет выходной сигнал регулятора. Это позволяет быстро реагировать на изменения и достичь желаемого значения.
Интегральная составляющая регулятора интегрирует ошибку регулирования во времени. Она накапливает ошибку и увеличивает выходной сигнал регулятора со временем. Это позволяет устранить постоянную ошибку регулирования и обеспечить точное следование желаемому значению.
Дифференциальная составляющая регулятора реагирует на скорость изменения измеряемой величины. Она предотвращает резкие изменения и позволяет более плавно регулировать систему. Дифференциальная составляющая также помогает предотвратить перерегулирование и осцилляции системы.
Комбинация этих трех составляющих позволяет ПИД регулятору эффективно и точно управлять системой, поддерживая ее в заданных рамках и обеспечивая быстрое и стабильное реагирование на изменения.
Основные компоненты ПИД регулятора
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы состоят из трех основных компонентов:
Пропорциональная составляющая (P-составляющая)
Пропорциональная составляющая регулятора пропорционально реагирует на разницу между текущим значением измеряемой величины и желаемым значением. Она усиливает эту разницу и создает управляющий сигнал, который пропорционален ошибке регулирования. Чем больше разница, тем больше будет управляющий сигнал.
Пропорциональная составляющая позволяет быстро реагировать на изменения и достичь желаемого значения. Однако, она может вызывать перерегулирование и осцилляции, если настройки не оптимальны.
Интегральная составляющая (I-составляющая)
Интегральная составляющая регулятора интегрирует ошибку регулирования во времени. Она накапливает ошибку и создает управляющий сигнал, который пропорционален интегралу ошибки. Интегральная составляющая позволяет устранить постоянную ошибку регулирования и обеспечить точное следование желаемому значению.
Однако, если интегральная составляющая настроена слишком агрессивно, она может вызывать перерегулирование и осцилляции системы.
Дифференциальная составляющая (D-составляющая)
Дифференциальная составляющая регулятора реагирует на скорость изменения измеряемой величины. Она предотвращает резкие изменения и позволяет более плавно регулировать систему. Дифференциальная составляющая также помогает предотвратить перерегулирование и осцилляции системы.
Комбинация этих трех составляющих позволяет ПИД регулятору эффективно и точно управлять системой, поддерживая ее в заданных рамках и обеспечивая быстрое и стабильное реагирование на изменения.
Принцип работы пропорциональной составляющей
Пропорциональная составляющая является основной и наиболее простой частью ПИД регулятора. Она реагирует на разницу между заданным значением (setpoint) и текущим значением измеряемой величины (process variable).
Пропорциональная составляющая вычисляет ошибку регулирования, которая является разницей между заданным значением и текущим значением. Затем она умножает эту ошибку на коэффициент пропорциональности (Kp), чтобы получить управляющий сигнал.
Управляющий сигнал, полученный от пропорциональной составляющей, пропорционален ошибке регулирования. Если ошибка большая, то управляющий сигнал будет большим, что приведет к более сильному воздействию на систему. Если ошибка мала, то управляющий сигнал будет малым, что приведет к более слабому воздействию на систему.
Пропорциональная составляющая позволяет быстро реагировать на изменения и поддерживать систему вблизи заданного значения. Однако, если коэффициент пропорциональности выбран неправильно, это может вызывать перерегулирование и осцилляции системы.
Принцип работы интегральной составляющей
Интегральная составляющая ПИД регулятора основана на интегрировании ошибки регулирования с течением времени. Она вычисляет интеграл от ошибки регулирования и добавляет его к управляющему сигналу.
Интегральная составляющая позволяет устранить постоянную ошибку регулирования, которая может возникать при использовании только пропорциональной составляющей. Если система имеет некоторое установившееся значение ошибки, интегральная составляющая будет накапливать эту ошибку и постепенно увеличивать управляющий сигнал, чтобы ее устранить.
Интегральная составляющая также позволяет компенсировать систематические возмущения, такие как постоянные силы трения или смещение равновесия системы. Она способна накапливать ошибку регулирования в течение времени и применять коррекцию, чтобы система достигла желаемого значения.
Однако, если коэффициент интегральной составляющей выбран неправильно, это может привести к интегральной неустойчивости, когда система начинает осциллировать или даже расходиться. Поэтому настройка коэффициента интегральной составляющей требует определенных знаний и опыта.
Принцип работы дифференциальной составляющей
Дифференциальная составляющая ПИД регулятора используется для предсказания будущего поведения системы на основе скорости изменения ошибки регулирования. Она реагирует на изменение ошибки и позволяет системе быстро реагировать на изменения входного сигнала.
Дифференциальная составляющая вычисляется путем нахождения производной ошибки регулирования по времени. Это позволяет определить, насколько быстро ошибка меняется и в каком направлении. Если ошибка регулирования растет быстро, то дифференциальная составляющая будет положительной и усилит действие регулятора. Если ошибка регулирования уменьшается быстро, то дифференциальная составляющая будет отрицательной и снизит действие регулятора.
Дифференциальная составляющая помогает предотвратить перерегулирование и осцилляции системы, так как она реагирует на изменение ошибки регулирования и позволяет системе быстро достичь установившегося значения. Она также помогает предотвратить интегральную неустойчивость, так как она может предсказать будущее поведение системы и принять соответствующие меры.
Однако, дифференциальная составляющая может быть чувствительна к шумам и быстрым изменениям ошибки регулирования. Поэтому необходимо правильно настроить коэффициент дифференциальной составляющей, чтобы избежать излишней чувствительности или неустойчивости системы.
Преимущества и недостатки ПИД регуляторов
Преимущества:
1. Универсальность: ПИД регуляторы могут быть применены в широком спектре систем управления, включая промышленные процессы, робототехнику, автоматическое управление транспортными средствами и другие области.
2. Высокая точность: ПИД регуляторы позволяют достичь высокой точности регулирования и управления системой. Они могут компенсировать ошибки и отклонения от желаемого значения.
3. Быстрая реакция: ПИД регуляторы могут быстро реагировать на изменения входного сигнала и принимать соответствующие меры для поддержания стабильности системы.
4. Простота настройки: ПИД регуляторы имеют несколько параметров, которые можно настроить для достижения оптимальной работы системы. Существуют различные методы настройки ПИД регуляторов, которые позволяют достичь желаемых результатов.
Недостатки:
1. Чувствительность к параметрам: ПИД регуляторы могут быть чувствительны к изменениям параметров системы, таким как инерция, временные задержки и нелинейности. Неправильная настройка параметров может привести к неустойчивости или низкой производительности системы.
2. Ограниченная адаптивность: ПИД регуляторы могут иметь ограниченную способность адаптироваться к изменениям в системе. Если система сильно меняется, может потребоваться перенастройка ПИД регулятора.
3. Проблемы с интегральной составляющей: Интегральная составляющая ПИД регулятора может вызывать интегральную неустойчивость, если не настроена правильно. Это может привести к постоянному увеличению ошибки регулирования.
4. Чувствительность к шумам: Дифференциальная составляющая ПИД регулятора может быть чувствительна к шумам и быстрым изменениям ошибки регулирования. Это может привести к нестабильности системы или неправильным действиям регулятора.
В целом, ПИД регуляторы являются мощным инструментом для управления и регулирования систем. Они обладают множеством преимуществ, но также имеют свои ограничения, которые необходимо учитывать при их применении.
Примеры применения ПИД регуляторов
Промышленные процессы
ПИД регуляторы широко применяются в промышленности для управления различными процессами. Например, в производстве химических веществ, пищевой промышленности, нефтяной и газовой промышленности, энергетике и других отраслях. Они используются для регулирования температуры, давления, уровня жидкости, скорости вращения и других параметров процессов.
Автоматические системы управления
ПИД регуляторы широко применяются в автоматических системах управления, таких как системы отопления и кондиционирования воздуха, системы управления двигателями, системы управления роботами и другие. Они позволяют поддерживать заданные значения параметров и обеспечивать стабильную работу системы.
Робототехника
ПИД регуляторы используются в робототехнике для управления движением роботов. Они позволяют роботам точно следовать заданному пути, удерживать равновесие и выполнять различные задачи. Например, ПИД регуляторы применяются в роботах-манипуляторах, автономных мобильных роботах и других типах роботов.
Электроника и электротехника
ПИД регуляторы используются в электронике и электротехнике для управления различными устройствами и системами. Например, они применяются в системах стабилизации напряжения и тока, системах автоматического регулирования яркости и контрастности, системах автоматического управления освещением и других.
Автоматические регуляторы температуры
ПИД регуляторы широко применяются в системах автоматического регулирования температуры. Они используются в системах отопления, кондиционирования воздуха, промышленных печах, холодильных установках и других системах, где необходимо поддерживать заданную температуру с высокой точностью.
Это лишь некоторые примеры применения ПИД регуляторов. Они находят широкое применение во многих областях, где требуется точное и стабильное управление и регулирование систем и процессов.
Рекомендации по настройке ПИД регуляторов
Начните с настройки пропорциональной составляющей
Пропорциональная составляющая определяет, насколько сильно регулятор будет реагировать на разницу между заданным значением и текущим значением. Начните с установки коэффициента пропорциональности (Kp) величиной, близкой к 1. Затем увеличивайте или уменьшайте его, пока не достигнете желаемого уровня реакции регулятора.
Настройте интегральную составляющую
Интегральная составляющая используется для устранения постоянной ошибки регулирования. Начните с установки коэффициента интегральности (Ki) величиной, близкой к 0. Затем увеличивайте его, пока не достигнете желаемого устранения постоянной ошибки. Однако будьте осторожны, поскольку слишком большое значение Ki может привести к нестабильности системы.
Настройте дифференциальную составляющую
Дифференциальная составляющая используется для предотвращения резких изменений в системе. Начните с установки коэффициента дифференциальности (Kd) величиной, близкой к 0. Затем увеличивайте его, пока не достигнете желаемого сглаживания резких изменений. Опять же, будьте осторожны, поскольку слишком большое значение Kd может привести к нестабильности системы.
Проверьте и настройте время цикла
Время цикла определяет, как часто регулятор будет обновляться и принимать новые значения. Убедитесь, что время цикла достаточно мало, чтобы обеспечить быструю реакцию регулятора, но не слишком мало, чтобы не перегружать систему.
Проведите тестирование и настройку на реальной системе
После настройки ПИД регулятора на основе теоретических значений, проведите тестирование и настройку на реальной системе. Наблюдайте поведение системы и вносите корректировки в коэффициенты ПИД регулятора, если необходимо, чтобы достичь желаемого уровня регулирования и стабильности.
Следуя этим рекомендациям, вы сможете настроить ПИД регуляторы для оптимального управления и регулирования систем и процессов.
Таблица с информацией о ПИД регуляторах
| Составляющая | Описание | Принцип работы | Преимущества | Недостатки |
|---|---|---|---|---|
| Пропорциональная | Управляющий сигнал пропорционален разности между заданным значением и текущим значением | Чем больше разница, тем больше управляющий сигнал | Быстрая реакция на ошибку, простота настройки | Может вызывать колебания и неустойчивость при больших значениях коэффициента |
| Интегральная | Управляющий сигнал пропорционален интегралу от ошибки | Устраняет постоянную ошибку, накапливая ошибку во времени | Устранение постоянной ошибки, устойчивость системы | Медленная реакция на изменение ошибки, возможность насыщения |
| Дифференциальная | Управляющий сигнал пропорционален производной от ошибки | Усиливает реакцию на изменение ошибки | Быстрая реакция на изменение ошибки, устойчивость системы | Чувствительность к шумам и помехам, возможность усиления колебаний |
Заключение
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы являются важным инструментом в области электротехники и автоматизации. Они позволяют управлять системами с обратной связью, обеспечивая стабильность и точность регулирования.
Основными компонентами ПИД регулятора являются пропорциональная, интегральная и дифференциальная составляющие. Пропорциональная составляющая регулирует выходной сигнал пропорционально ошибке между заданным и текущим значением. Интегральная составляющая устраняет постоянную ошибку путем интегрирования ошибки во времени. Дифференциальная составляющая предсказывает будущую ошибку на основе скорости изменения текущей ошибки.
ПИД регуляторы имеют свои преимущества, такие как быстрая реакция на изменения, устранение постоянной ошибки и возможность настройки параметров для оптимальной работы. Однако, они также имеют недостатки, такие как сложность настройки и возможность возникновения колебаний и нестабильности при неправильной настройке.
Примеры применения ПИД регуляторов включают автоматическое управление температурой, скоростью двигателей, позиционирование роботов и другие системы, где требуется точное
ПИД регуляторы: простое объяснение, основные компоненты и примеры применения обновлено: 11 ноября, 2023 автором: Научные Статьи.Ру
Немного про ПИД-регуляторы или «велосипед автоматизации». Часть 1
Прочитав статьи по теории автоматического управления https://habr.com/ru/post/503820/ в очередной раз освежил в памяти курс лекций времен студенчества. Понятно, что это именно теория САР, т.е. реальный объект отображается в виде математического описания и затем с использованием математических инструментов синтезируется регулятор (точнее его математическое описание) и рассчитываются параметры регулятора.
Как и все поколения будущих инженеров, в ВУЗе я делал лабораторные и курсовые, что-то рассчитывал, чертил годографы и казалось, что понимал теорию и был готов применять ее на практике. По окончанию университета, попав инженером АСУТП на нефтеперерабатывающий завод, увидев реальную установку, контроллеры, датчики, клапаны, я был в некотором недоумении: как связать теорию САР с поддержанием в колонне уровня скворчащей горячей жидкости при посредстве дрожащего буйкового уровнемера и гудящего замазученного клапана. Да и описание регулятора в документации на ПЛК сильно отличалось от схемы в лекциях по САУ. Со временем, поняв опытным путем и процессы в колоннах и аппаратах, и подходы к практическому построению контуров регулирования, освежив в памяти теорию удалось более осознано связать теорию САР с реальным процессом. Но каждое следующее поколение инженеров, попадая после ВУЗа на реальное производство, задавалось теми же вопросами.
Почитав еще раз лекции и пересмотрев множество материалов по «практической реализации ПИД-регуляторов», я не нашел грамотного и доступного для понимания описания как самого ПИД-регулятора, так и процесса регулирования. Поэтому решил написать свою статью «про велосипед автоматизации».
В качестве практического примера будем рассматривать технологические процессы, связанные с движением жидкости и газа в аппаратах и трубопроводах (системы водоподготовки и водоочистки, нефте- и газоперерабатывающие производства и т.д.). Физическое управление технологическим процессом выполняется посредством изменения расхода газообразной или жидкой среды:
— уровень жидкости в аппарате (емкости, колонне) – изменением расходы на входящем или исходящем трубопроводе;
— давление в аппарате – изменением расхода газа, подаваемого в аппарат или отводимого(сбрасываемого) из аппарата;
— температура потока после технологической печи – изменением расхода топлива к горелкам;
— температура среды после парового подогревателя – изменением расхода пара в подогреватель;
— температура среды после теплообменника – изменением расхода через теплообменник и через байпасную линию;
Если рассматривать автоматизацию процессов в других областях, например, стабилизация положения летательного аппарата, то там будут свои особенности в практической реализации автоматического регулирования.
Чтобы сделать понимание материала более доступным, на первом этапе все максимально упростим, и будем усложнять по мере описания.
1. Вводные положения.
Возьмем самую простую «классическую» задачу. Есть емкость, по одной трубе в емкость подается жидкость, по другой отводится. На емкость установлен уровнемер, на отводящем трубопроводе установлен регулирующий клапан. Уровнемер и клапан подключены к ПЛК, в ПЛК реализован регулятор. Задача — поддерживать уровень в емкости на заданном значении.

Любой оператор или инженер АСУТП вам скажет, что регулятор, реализованный в контроллере поддерживает заданный уровень в емкости управляя регулирующим клапаном. Это очевидно и вполне логично.
Но для теории САР все выглядит несколько иначе.
Типовое изображение контура регулирования в учебники по автоматизации.

И формула для ПИД регулятора

Для теории САР объектом регулирования будет не емкость и не показания уровнемера, а количество жидкости в емкости. Количество жидкости в емкости – это функция во времени от разности поступающего и отводимого потоков, если поступает больше чем отводится количество жидкости в емкости увеличивается, если отводится больше чем поступает количество снижается.
Уровень жидкости в емкости – это функция от количества жидкости, в зависимости от формы емкости функция может быть линейной (вертикальный цилиндр) или нелинейной (горизонтальный цилиндр или более сложная форма).
Управляющее воздействие на объект регулирования – это не выходной сигнал контроллера и не положение клапана, это изменение расхода в отводящем трубопроводе.
Токовый выход контроллера, преобразование в клапане токового сигнала в положение плунжера, изменение расхода от положения плунжера – это все звенья передачи управляющего воздействия, все эти звенья описываются как функция между входными и выходными переменными и некоторое запаздывание. Например, масштабирование инженерных единиц в токовый сигнал – это линейное звено, а изменение расхода от положения плунжера клапана описывается расходной характеристикой и как правило будет нелинейным звеном.
Уровнемер – это звено преобразования уровня в токовый входной сигнал, он также реализует функцию преобразования входной и выходной переменной и вносит некоторое запаздывание.
ПЛК — это сложное устройство, реализующее как минимум функции масштабирования переменных и расчетные функции. В теории САР ПЛК будет также представлен набором звеньев, и только одним из этих звеньев будет ПИД-регулятор.
Очень упрощенное теоретическое представление для нашего примера можно принять следующее:

Еще один часто встречающийся пример, это системы нагрева. При нагреве продукта в печи или теплообменнике, объектом регулирования будет сама температура как функция от разности подводимого и отводимого тепла, а подача теплоносителя или топливного газа в печь, изменение расхода среды в змеевиках и т.д. – это все звенья, формирующие управляющее или возмущающее воздействие.
Или бытовой пример, объект регулирования – температура в комнате, управление термистором, мощность подводимая к нагревателю, открытие форточки электроприводом – это звенья формирующие управляющее воздействие, определяющие количество подводимого или отводимого тепла, изменение теплоотдачи помещения через стены, окна, открытую дверь – это возмущающие воздействия.
В нашем примере, все физические элементы, используемые для решения задачи поддержания уровня в емкости и связи между этими элементами, составляют контур регулирования. Когда проектировщик в проектном институте составляет перечень контуров регулирования, он оперирует именно физическими устройствами: уровнемер, искробезопасный барьер, входной модуль, программный блок в ПЛК, выходной модуль, регулирующий клапан. Но надо понимать, что эти «проектные» контуры регулирования никак не соотносятся с контурами в теории САУ.
Если погружаться еще дальше в теоретическое описание, то и уровнемер, и клапан, и искробезопасны барьер и все остальные возможные устройства будут состоять из набора звеньев, и каждое звено будет иметь свое математическое описание. Например, буйковый уровнемер можно представить как набор звеньев:
1 – буек определенного объема и массы;
2 – подвес, рычажную тягу и торцевое уплотнение с определенной жесткостью;
3 – датчик Холла с нелинейной характеристикой;
4 – усилитель сигнала от датчика Холла;
5 – аналого-цифровой преобразователь;
У регулирующего клапана звеньев будет не меньше, так как надо учитывать еще позиционер и пневмопривод.
Составить полное математическое описание САУ даже для нашего тривиального случая дело очень непростое, даже если принять достаточно много упрощений.
Проводить серьезное исследование с математическим описанием имеет смысл для задач, которые будут тиражироваться, когда целесообразно потрать силы, время и деньги, составить математическое описание объекта и всех звеньев, выполнить моделирование, синтезировать регуляторы, снова выполнить моделирование и т.д. И результаты этой работы можно будет многократно использовать в конечном продукте. В качестве примера можно привести САУ летательного аппарата (самолета, квадрокоптера, ракеты) или систему регулирования сложного блока питания. Выполнять весь этот объем работы для разового применения на одной емкости можно только в учебных целях и то с большими упрощениями.
Любой физический процесс в технологическом оборудовании можно разложить на объект регулирования и несколько передаточных звеньев, формирующих управляющие и возмущающие воздействия.
Реальный объект – ректификационная колонна.
Если вместо упрощенной емкости взять для рассмотрения куб ректификационной колонны, то модель будет несколько сложнее (колонны бывают разные). Поступающий в колонну нагретый продукт содержит жидкость и парогазовую фазу, в колонне часть продукта испаряется снижая общую температуру жидкой фазы, часть соответственно конденсируется на тарелках. В результате процесса ректификации в куб колонны попадает только часть поступающего в колонну продукта, и количество этого продукта зависит от многих условий: фракционный состав, температура, давление в колонне, расходы и температура потоков орошения, температурный профиль колонны и т.д. Любое изменение в режиме колонны приводит к изменению количества жидкости, поступающей в кубовую часть — это сложная функция от множества переменных. Изменение объема поступающей в куб жидкости будет возмущающим воздействием. Конечно существуют качественные модели ректификационных колонн и «цифровые двойники», но в моделях всегда используются некоторые допущения, да и процесс создания двойников очень трудоемкий. Для построения контуров регулирования большинства технологических процессов и настройки регуляторов не обязательно разрабатывать цифровые модели, для этого есть более простые и бюджетные методики.
Теперь с представлением физического объекта в теории САУ наверно стало более понятно и можно переходить к построению ПИД-регулятора в ПЛК.
- пид-регулятор
- автоматизация
- автоматическое управление
- промышленная автоматизация
- scada
Немного про ПИД-регуляторы или «велосипед автоматизации». Часть 2
Все, что будет написано ниже про реализацию ПИД-регулятора в ПЛК, не является чем-то новым и революционным. Практически всю эту информацию можно найти в документации на ПЛК серьезных производителей. Если вы инженер АСУТП со стажем и добросовестно изучали документацию на ПЛК, то все это вам известно. Но в текущей реалии есть каста молодых инженеров и студентов, которая все знания черпает из роликов на ютубе. Заставив себя посмотреть несколько самых популярных роликов про реализацию ПИД-регулятора, я был огорчен качеством излагаемого материала: объяснение работы ПИД-регулятора уж очень «колхозное», а реализация сводится к 15 строкам кода на С++, что порождает
упрощенное и ошибочное понимание предмета. Вот для касты ютуб специалистов в
первую очередь и предназначено это описание.
Теперь необходимо определиться с терминологией

Для более наглядного изложения перейдем от теоретического описания к «инженерному», которое используется в повседневной практике, пусть это и не совсем корректно, т.е. регулируем уровень в колонне посредством изменения положения регулирующего клапана:
- ПИД – функция (функциональный или программный блок) реализующая алгоритм регулирования, включает три составляющих: П – пропорциональная составляющая, И – интегральная составляющая, Д – дифференциальная составляющая;
- переменная процесса PV – значение текущего уровня, полученное с уровнемера, может измеряться как в инженерных единицах (мм), так и в относительных (%);
- уставка SP (задание регулятору) – значение уровня, которое должен поддерживать регулятор в автоматическом режиме, единицы измерения как у PV;
- выход регулятора OP – значение, которое формирует регулятор и которое определяет положение клапана, в нашем примере будет 0-100%;
- E – ошибка или рассогласование, разница между уставкой и фактическим значением переменной процесса, ошибка подается на вход ПИД-функции;
- tс – время цикла, периодичность с которой в ПЛК выполняется ПИД-функция (можно конечно поместить ПИД-функцию в циклическую задачу, и она будет выполняться каждый цикл ПЛК, но тогда время цикла предсказать невозможно и для расчета интегральной и дифференциальной составляющей определять время придется внутри ПИД-функции, проще всю ПИД-функцию выполнять периодически с фиксированным временем цикла);
- прямое/обратное направление действия регулятора – режим формирования регулятором выходного значения, прямое действие — при увеличении значения переменной процесса PV регулятор увеличивает значение выхода OP, обратном действие — при увеличении значения переменной процесса PV регулятор уменьшает значение выхода OP.
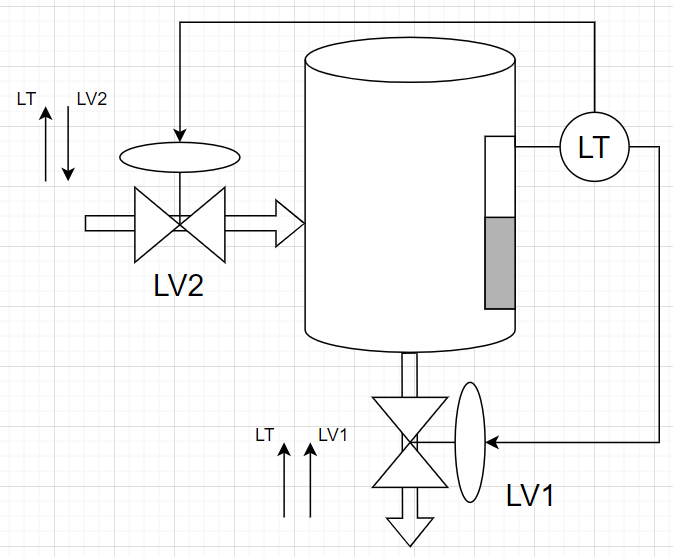
Реализуется направление действия регулятора методом вычисления ошибки, для прямого действия E=PV-SP, для обратного E=SP-PV. На рисунке показаны два варианта установки клапана для регулирования уровня в емкости. Первый вариант – клапан LV1 установлен на отводящем трубопроводе, т.е при увеличении уровня (PV) клапан должен открываться, это прямое действие регулятора E=PV-SP. Второй вариант – клапан LV2 установлен на подающем трубопроводе, т.е. при повышении уровня клапан должен закрываться, это будет обратное действие регулятора E=SP-PV.
ПЛК является дискретным устройством, поэтому ПИД-функция выполняется периодически с заданным временем цикла tc и формула ПИД-регулятора трансформируется из непрерывной формы в дискретную:

OP – выход ПИД-функции, E – ошибка (рассогласование), n – текущий цикл, n-1 – предыдущий цикл, tc – время цикла ПИД-функции, kP,kI,kD – коэффициенты П,И,Д-составляющих. Для дискретной формы вместо времени используется номер отсчета (цикла). В таком виде ПИД-функция и реализуется в ПЛК.
Рассмотрим работу регулятора только с П-составляющей (пропорциональное регулирование) для исходного примера — поддержание уровня в емкости клапаном на отводящем трубопроводе. Регулятор получается прямого действия E=PV-SP. Время цикла для выполнения ПИД-функции примем 0,3 секунды, коэффициент kP=2, диапазон уровнемера 0-100%, диапазон открытия регулирующего клапана 0-100%, расход на отводящем трубопроводе линейно зависит от положения клапана, 10% открытия клапана соответствует расходу 10м3/час.
В начальный момент жидкость в емкости отсутствует (уровень равен нулю), расхода в подающем трубопроводе нет. В регуляторе задана уставка 30%. При таких условиях ошибка (рассогласование) на входе в П-функцию E=PV-SP=0-30=-30 (отрицательная). Выход П-функции OP=kP*E также получается отрицательным, но положение клапана не может быть меньше «0», поэтому клапан просто полностью закрыт.
Подаем жидкость в емкость с фиксированным расходом (условно 10м3/ч), емкость наполняется, значение уровня увеличивается, достигает значения уставки 30% и продолжает постепенно увеличивается. Ошибка E=PV-SP становится положительной и также увеличивается, соответственно значение выхода П-функции OP=kP*E становится положительным клапан начинает открываться. Чем выше уровень в емкости, тем больше значение ошибки на входе П-функции и больше открытие клапана. При значении уровня в 35% значение ошибки будет E=PV-SP=35-30=5, открытие клапана будет OP=kP*E=5*2=10%, что обеспечивает расход в отходящем трубопроводе 10м3/час. Расход в отводящем трубопроводе равен расходу в подающем трубопроводе, следовательно изменение уровня в емкости прекратилось, система пришла в равновесие, т.е. при kP=2 равновесие (стабилизация, окончание процесса регулирования) наступает при ошибке E=5%.

В П-регуляторе значение ошибки не может быть равным «0». Чтобы обеспечивать требуемый расход в отходящем трубопроводе, на входе П-регулятора должна быть ошибка, соответствующая необходимому положению клапана, а при E=0 выход OP также будет равен «0», клапан будет закрыт.
Чтобы уменьшить ошибку П-регулятора, нужно увеличивать коэффициент kP. При kP=5 ошибка будет E=2, так как OP=kP*E=5*2=10, что соответствует требуемому положению клапана.

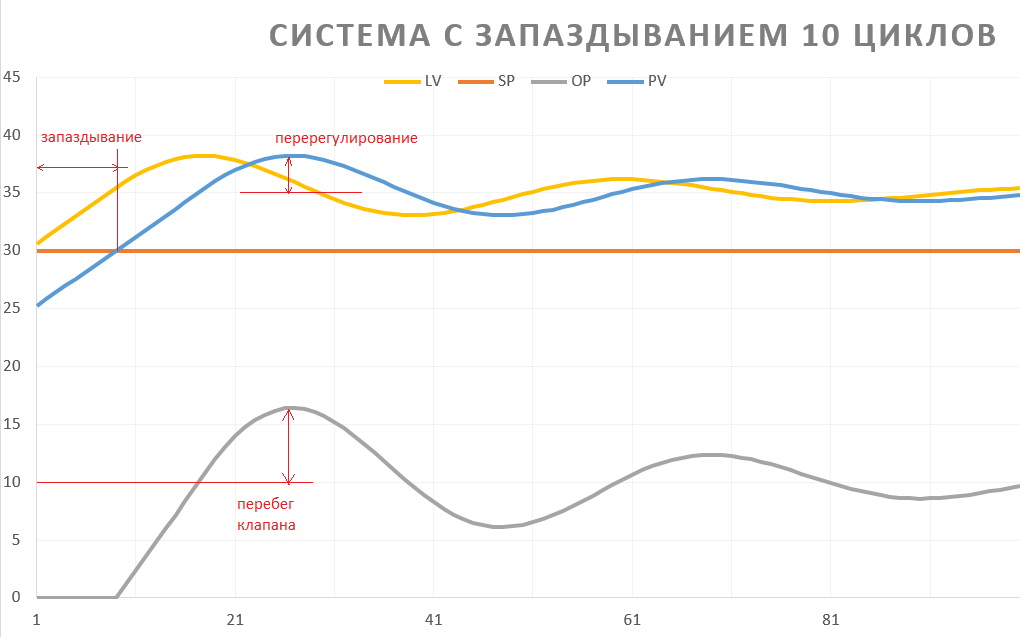
В идеальной системе, в которой отсутствует запаздывание, коэффициент kP можно увеличивать до бесконечности, тем самым уменьшая ошибку в установившимся режиме. В реальных системах запаздывание присутствует всегда. В нашем примере, изменение уровня в емкости будет отставать от изменения положения клапана, а показания уровнемера будут отставать от фактического значения уровня. На следующем рисунке показано поведение системы при наличии запаздывания между показаниями уровнемера и фактическим уровнем на 10 циклов. При том же kP=2 в системе появилось перерегулирование, «перебег» клапана и затухающие колебания.
Теперь, при наличии запаздывания в системе, если увеличить коэффициент усиления kP=3, колебания в системе становятся незатухающими, система теряет устойчивость.

Это означает, что в реальной системе коэффициент kP имеет предельное максимальное значение, выше которого система теряет устойчивость. Максимальному kP соответствует минимальная ошибка, которую можно обеспечить без потери устойчивости. Дальнейшее уменьшение ошибки одной П-функцией невозможно.
Эксперименты с П-функцией на этом можно закончить, возвращаемся к реализации регулятора в ПЛК.
У вас большие запросы!
Точнее, от вашего браузера их поступает слишком много, и сервер VK забил тревогу.
Эта страница была загружена по HTTP, вместо безопасного HTTPS, а значит телепортации обратно не будет.
Обратитесь в поддержку сервиса.
Вы отключили сохранение Cookies, а они нужны, чтобы решить проблему.
Почему-то страница не получила всех данных, а без них она не работает.
Обратитесь в поддержку сервиса.
Вы вернётесь на предыдущую страницу через 5 секунд.
Вернуться назад