Все, что вам нужно знать о датчиках гироскоп: принцип работы, типы и применение
Датчики гироскопа – это устройства, которые измеряют угловую скорость и ориентацию объекта, и они широко применяются в робототехнике для стабилизации и навигации.
Все, что вам нужно знать о датчиках гироскоп: принцип работы, типы и применение обновлено: 28 ноября, 2023 автором: Научные Статьи.Ру
Помощь в написании работы
Введение
Добро пожаловать на лекцию по робототехнике! Сегодня мы поговорим о датчиках гироскоп, важном компоненте в мире робототехники. Датчики гироскоп используются для измерения угловой скорости и ориентации объектов в пространстве. Они играют ключевую роль в стабилизации и навигации роботов, а также в других приложениях, где необходимо контролировать движение и ориентацию.
Нужна помощь в написании работы?
Написание учебной работы за 1 день от 100 рублей. Посмотрите отзывы наших клиентов и узнайте стоимость вашей работы.
Что такое датчик гироскоп
Датчик гироскоп – это электронное устройство, которое используется для измерения угловой скорости или изменения ориентации объекта в пространстве. Он основан на принципе сохранения момента импульса и позволяет определить, как быстро и в каком направлении происходит вращение объекта.
Датчики гироскопа могут быть реализованы различными способами, но основной принцип работы заключается в использовании эффекта Кориолиса. Когда объект вращается, его масса создает инерциальные силы, которые воздействуют на датчик гироскопа. Эти силы вызывают отклонение или изменение параметров, которые могут быть измерены и интерпретированы для определения угловой скорости.
Датчики гироскопа широко применяются в различных областях, включая навигацию, авиацию, робототехнику, игровую индустрию и многое другое. Они позволяют устройствам и системам определять свое положение и ориентацию в пространстве, что является важным для точной навигации и управления.
Принцип работы датчика гироскоп
Датчик гироскопа основан на принципе сохранения углового момента. Угловой момент – это физическая величина, которая характеризует вращение тела вокруг оси. Датчик гироскопа измеряет изменение углового момента и использует его для определения угловой скорости.
Основной элемент датчика гироскопа – это гироскопический датчик, который состоит из вращающегося ротора и неподвижного статора. Ротор может вращаться вокруг оси, перпендикулярной оси вращения. Когда датчик гироскопа подвергается угловому ускорению, ротор начинает вращаться вокруг оси, перпендикулярной оси вращения. Это вызывает отклонение ротора от его исходного положения.
Датчик гироскопа измеряет отклонение ротора и преобразует его в электрический сигнал, который можно интерпретировать как угловую скорость. Чем больше угловое ускорение, тем больше отклонение ротора и тем больше угловая скорость.
Существуют различные типы датчиков гироскопа, включая механические, оптические и электронные. Каждый тип имеет свои особенности и применение в различных областях.
Типы датчиков гироскоп
Существует несколько типов датчиков гироскопа, которые используют различные принципы работы для измерения угловой скорости:
Механические гироскопы
Механические гироскопы основаны на принципе сохранения углового момента. Они состоят из вращающегося ротора, который сохраняет свою ось вращения в пространстве. Когда ротор подвергается угловому ускорению, он отклоняется от своего исходного положения, и это отклонение можно измерить. Механические гироскопы обычно используются в навигационных системах и стабилизаторах.
Оптические гироскопы
Оптические гироскопы используют принцип интерференции света для измерения угловой скорости. Они состоят из оптического волокна, через которое проходит световой луч. Когда гироскоп подвергается угловому ускорению, оптическое волокно изгибается, изменяя длину пути светового луча. Это изменение длины пути приводит к изменению интерференционной картины, которую можно измерить и интерпретировать как угловую скорость. Оптические гироскопы обычно используются в авиационной и космической промышленности.
Электронные гироскопы
Электронные гироскопы используют эффект Кориолиса для измерения угловой скорости. Они состоят из микроэлектромеханического (МЭМС) датчика, который вибрирует в определенной плоскости. Когда гироскоп подвергается угловому ускорению, сила Кориолиса вызывает отклонение вибрирующего датчика, и это отклонение можно измерить. Электронные гироскопы обычно используются в смартфонах, игровых контроллерах и других устройствах, требующих измерения угловой скорости.
Каждый тип датчика гироскопа имеет свои преимущества и ограничения, и выбор конкретного типа зависит от требований и конкретного применения.
Применение датчиков гироскоп
Датчики гироскопа широко применяются в различных областях, где требуется измерение угловой скорости или ориентации объекта. Вот некоторые из основных областей применения датчиков гироскопа:
Автомобильная промышленность
В автомобильной промышленности датчики гироскопа используются для стабилизации и контроля движения автомобилей. Они помогают определить угловую скорость и угол поворота автомобиля, что позволяет системам стабилизации и управления поддерживать его стабильность и безопасность на дороге.
Авиационная и космическая промышленность
В авиации и космической промышленности датчики гироскопа играют важную роль в навигации и стабилизации. Они используются для измерения угловой скорости, ориентации и угла наклона воздушных и космических судов. Это позволяет пилотам и системам автоматического управления точно определить положение и ориентацию объекта в пространстве.
Робототехника
В робототехнике датчики гироскопа используются для измерения угловой скорости и ориентации роботов. Это позволяет им точно определить свое положение и ориентацию в пространстве, что важно для выполнения задачи или навигации в окружающей среде.
Виртуальная реальность и игровая индустрия
Виртуальная реальность и игровая индустрия используют датчики гироскопа для отслеживания движения игрока. Они позволяют игрокам управлять персонажами или объектами в игре, используя свои движения и ориентацию тела.
Медицинская техника
В медицинской технике датчики гироскопа используются для измерения движения и ориентации внутри тела пациента. Они могут быть использованы, например, для навигации при хирургических операциях или для контроля движения при реабилитации пациентов.
Это лишь некоторые из множества областей, где применяются датчики гироскопа. Их точность и надежность делают их важным инструментом для измерения и контроля угловой скорости и ориентации объектов в различных приложениях.
Преимущества и ограничения датчиков гироскоп
Преимущества:
1. Высокая точность измерений: Датчики гироскопа обладают высокой точностью измерения угловой скорости и ориентации объектов. Это позволяет использовать их в различных приложениях, где требуется точное измерение и контроль движения.
2. Быстрая реакция: Датчики гироскопа обладают высокой скоростью реакции на изменение угловой скорости. Это позволяет быстро и точно определить изменение положения объекта и принять соответствующие меры.
3. Компактность: Датчики гироскопа могут быть очень компактными и легкими, что делает их удобными для установки в различных устройствах и системах.
4. Надежность: Датчики гироскопа обычно имеют высокую надежность и долгий срок службы. Они могут работать в широком диапазоне условий и выдерживать вибрации, удары и другие внешние воздействия.
Ограничения:
1. Дрейф: Датчики гироскопа могут иметь небольшой дрейф, то есть накопление ошибки измерения со временем. Это может привести к неточности в определении угловой скорости и ориентации объекта.
2. Чувствительность к внешним воздействиям: Датчики гироскопа могут быть чувствительны к вибрациям, ударам и другим внешним воздействиям. Это может привести к искажению измерений и ухудшению точности.
3. Зависимость от условий окружающей среды: Датчики гироскопа могут быть чувствительны к изменениям температуры, влажности и другим условиям окружающей среды. Это может повлиять на их работу и точность измерений.
4. Стоимость: Некоторые типы датчиков гироскопа могут быть довольно дорогими, особенно если требуется высокая точность и надежность. Это может быть ограничением для некоторых приложений с ограниченным бюджетом.
Несмотря на ограничения, датчики гироскопа остаются важным инструментом для измерения и контроля угловой скорости и ориентации объектов в различных областях, таких как авиация, робототехника, навигация и другие.
Таблица с информацией о датчиках гироскоп
| Тип датчика гироскоп | Принцип работы | Применение | Преимущества | Ограничения |
|---|---|---|---|---|
| Механический гироскоп | Основан на сохранении углового момента | Авиация, навигация, робототехника | Высокая точность, надежность | Большие размеры, высокая стоимость |
| Пьезоэлектрический гироскоп | Измерение изменения давления | Мобильные устройства, игровые контроллеры | Маленький размер, низкое энергопотребление | Ограниченная точность, влияние внешних факторов |
| Фотонный гироскоп | Измерение изменения фазы света | Автомобильная промышленность, навигационные системы | Высокая точность, компактность | Высокая стоимость, сложность калибровки |
Заключение
Датчики гироскопа являются важной частью робототехники и других технологий, где требуется измерение угловой скорости и ориентации. Они работают на основе принципа сохранения углового момента и могут быть реализованы в различных типах, таких как механические, оптические и микроэлектромеханические системы. Датчики гироскопа широко применяются в автомобилях, самолетах, мобильных устройствах и роботах для обеспечения стабильности, навигации и контроля движения. Они имеют множество преимуществ, таких как высокая точность, быстрая реакция и компактный размер, однако они также имеют ограничения, такие как дрейф и шум. В целом, датчики гироскопа играют важную роль в современных технологиях и продолжают развиваться для улучшения функциональности и эффективности.
Все, что вам нужно знать о датчиках гироскоп: принцип работы, типы и применение обновлено: 28 ноября, 2023 автором: Научные Статьи.Ру
Каков принцип работы цифровых гироскопов?
Везде пишут, что они измеряют угловую скорость, но как? Чтобы выразить через центростремительное ускорение, то нужно знать радиус. Или там по другому принципу? Не понятно.
Лучший ответ
Вибрационные МЭМС-гироскопы — устройства, сохраняющие направление своих колебаний при повороте основания пропорционально угловой скорости (ДУС — датчики угловой скорости) или углу поворота основания (интегрирующие гироскопы). Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторными гироскопами. В англоязычной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — хотя принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, микромеханические вибрационные гироскопы применяются в системе измерения наклона электрического самоката Segway. Система состоит из пяти вибрационных гироскопов, данные которых обрабатываются двумя микропроцессорами.
Подобные типы микрогироскопов используются в мобильных устройствах, в частности, в мультикоптерах, фотоаппаратах и видеокамерах (для управления стабилизацией изображения), в смартфонах и т. д.
Остальные ответы
«цифровой гироскоп» часто применяют, но под ним подразумевают совсем разные вещи. Скорее всего с цифровым интерфейсом и содержащий микроконтроллер, корректирующий погрешности. Хотя некоторые типы гироскопов по принципу действия выдают импульсы лазерный например.
Оптические гироскопы [править | править вики-текст]
Основные статьи: Лазерный гироскоп, Волоконно-оптический гироскоп

Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.
Делятся на лазерные (активные оптические) гироскопы, пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические (ВОГи ИОГ). Принцип действия основан на эффекте Саньяка, открытом в 1913 году [14][15]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта [16]. В то время как в неинерциальной системе она может отличаться от c[17]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре [14]:
>>,>
где  -разность времён прихода лучей, выпущенных в разных направлениях,  — площадь контура,  — угловая скорость вращения гироскопа. Так как величина  очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длиной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный [14]:
МЭМСы. Как устроены современные датчики?
Микроэлектромеханические системы (МЭМС) — устройства, объединяющие в себе микроэлектронные и микромеханические компоненты. Сейчас довольно трудно встретить системы в которых не используются датчики, выполненные по данной технологии. Но как устроены современные датчики и какие преобразователи используются для работы с ними? Постараемся детально разобраться в этом вопросе, основываясь на работе современных МЭМС-акселерометров.

Простейший акселерометр, как он работает?
Акселерометр — прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). Принцип работы можно объяснить с помощью простой модели.
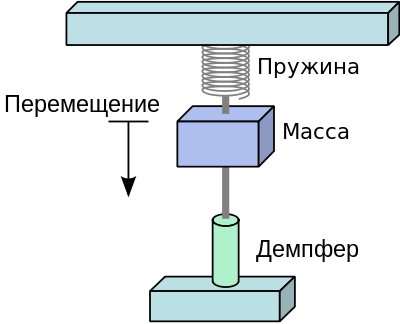
Модель устройства механического акселерометра (оригинал)
При увеличении ускорения, масса будет растягивать пружину. По закону Гука из школьной программы физики можно с легкостью найти ускорение системы:
, где k -коэффициент упругости пружины, – ее растяжение и m – масса груза.
Используя три перпендикулярно расположенных датчика, можно узнать ускорение предмета по 3-м осям, и зная начальные условия определить положение тела в пространстве.
Эта незамысловатая модель представляет собой основу работы большинства акселерометров, которые можно поделить на 3 основные подгруппы:
- механические
- электронные
- пьезоэлектрические
Пьезоэлектрический акселерометр
Основывается данный тип датчиков на пьезорезистивном эффекте, который был открыт в 1954 году Смитом в таких полупроводниках как германий и кремний. В отличие от пьезоэлектрического эффекта, пьезорезистивный эффект вызывает изменение только электрического сопротивления, но не электрического потенциала.
Анимация пьезоэффекта (оригинал)
При увеличении ускорения, инертная масса увеличивает/уменьшает давление на пьезоэлемент. Благодаря пьезоэффекту происходит генерация сигнала, который зависит от внешнего ускорения.

Устройство пьезоэлектрического акселерометра (оригинал)
Датчики такого типа требуют дополнительного усилителя, который увеличивает амплитуду сигнала, и создает низкоимпедансный выход для работы с внешними устройствами. Для калибровки нулевого значения ускорения используется Preload Bolt, масса которого рассчитана так, чтобы соответствовать нулевой точки ускорения в системе.
Датчики такого типа до сих пор сильно распространены, и в основном применяются в системах, требующих высокую надежность — automotive. Для коммерческой электроники зачастую используют электронные акселерометры, которые имеют меньший размер и цену.
Электронные акселерометры
Принцип работы электронных датчиков основан на изменении емкости конденсаторов при изменении ускорения. Простейшая модель работы представлена на картинке.
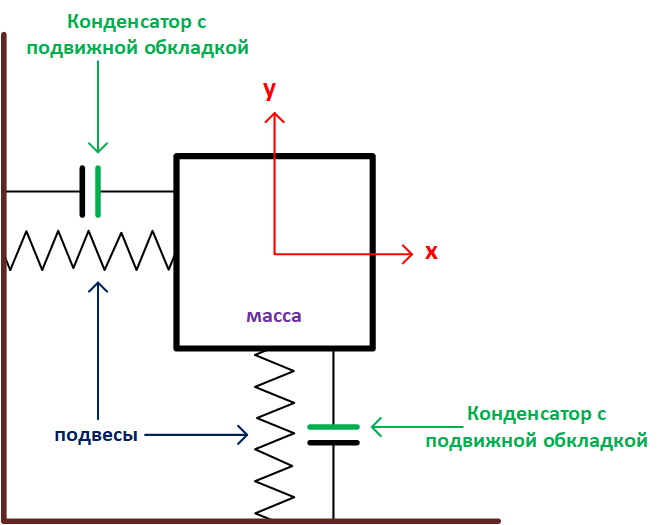
Устройство 2-х осевого электро-механического акселерометра
При изменении ускорения, масса изменяет расстояние между обкладками конденсатора. Из простейшей формулы емкости конденасатора следует, что при изменении d расстояния между обкладками емкость конденсатора будет также изменяться. Широкое применение данный метод получил, благодаря развитию МЭМС (MEMS)– микроэлектромеханических систем.
МЭМС технологии позволяют создавать конденсаторы с подвижными обкладками на кремниевой подложке, что существенно уменьшает размер устройства, и что не маловажно – его стоимость.

Устройство 2-х осевого электро-механического акселерометра (оригинал из книги «Introductory MEMS». Дальнейшие иллюстрации тоже взяты из этой книги)
У читателя наверняка возник вопрос: “как именно детектировать изменение емкости конденсатора?” Постараюсь дать на этот вопрос исчерпывающий ответ.
Устройство МЭМС акселерометра. Как превратить изменение емкости в сигнал?
Емкостной полумост

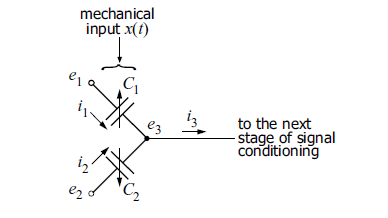
Итак прежде, чем описывать работу самого датчика, обратимся к довольно популярной схеме в схемотехнике – емкостному полумосту (Capacitive half-bridge).
Емкостной полумост — основа МЭМС-датчиков
Напряжения и являются входными, а – выходной сигнал для последующего преобразования. Емкости обоих конденсаторов зависят от внешнего ускорения, и изменяются на величину x(t). При x = 0, заряды на емкостях являются идентичными, и при этом . При условии, что x
Вывод формулы для изменения емкости
Запишем изменение каждой емкости при сдвиге обкладки на x:
Запишем через формулу емкости:
Упростив данные формулы, получаем следующее:
Итак часть пути пройдена, мы получили как зависит значение изменения емкости от изменения положения обкладки (то есть внешнего ускорения). Пора это изменение детектировать: вводим дополнительные токи — . Теперь остается вычислить как выходной ток будет зависеть от изменения положения обкладки.
Емкостной полумост — токи
Вывод формулы зависимости выходного тока от изменения емкости
По правилу Кирхгофа для токов получаем следующее уравнение:
Учитывая тот факт, что ток является производной заряда dq/dt, а заряд q=CU, преобразуем данное уравнение в следующий вид:
Пусть потенциалы , тогда исходя из формулы (1.1):
Итак если использовать одинаковые потенциалы входных напряжений получаем зависимость тока:
Результат получился довольно странный: выходной ток никак не зависит от изменения емкости. Для того, чтобы детектировать изменение емкости, необходимо задавать на обкладках напряжения разной полярности, то есть: , а . Тогда переделаем уравнение с учетом данной модификации.
Зависимость тока от изменения положения обкладки с учетом разной полярности входных напряжений
Перепишем уравнение 1.3:
Учитывая уравнение 1.2 для изменения емкости, получаем:
- если положение пластин не меняется во времени, то
- аналогично если источник сигнала постоянный (DC), то
, где – частота переменного сигнала (определяется на этапе разработки, в зависимости от полосы пропускания системы и нормальной работы механических емкостей).
Итак, мы получили уравнение (1.4), которое показывает, как изменение емкости конденсатора влияет на выходной сигнал системы. Однако такой сигнал будет довольно малый по амплитуде, к тому же если подключим к нему нагрузку для общения с внешним миром — вся система рухнет. Тут нужен усилитель…
Просто добавь усилитель
Добавим в нашу систему усилитель (будем считать, что коэффициент усиления — — сл-но работает принцип виртуальной земли).
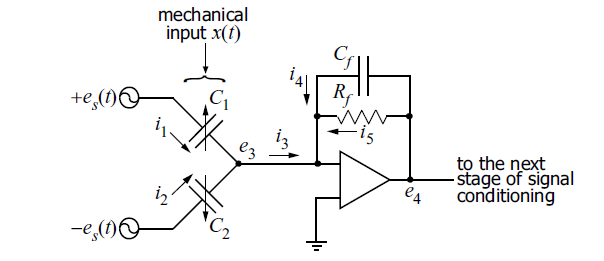
Емкостной полумост + интегратор
Итак теперь найдем зависимость выходного напряжения усилителя от изменения емкости.
Выходное напряжение усилителя
Запишем уравнение Кирхгофа для этой системы:
Ток через конденсатор можно записать через изменение заряда dq/dt, поэтому исходя из полученного уравнения (1.4) получаем:
Данное уравнение показывает, что выходной сигнал зависит не только от положения обкладки x, но и от ее скорости движения (что не желательно). Для того чтобы компонента, вносимая скоростью, была незначительной, необходимо использовать высокочастотный входной сигнал (обычно такую частоту выбирают в районе 1 ГГц). Запишем компоненты уравнения как гармонические сигналы:
Выбираем частоту достаточно высокую, чтобы :
Учитывая, что сигналы и имеют одинаковую частоту переходим к отношению их амплитуд:
В итоге мы получили зависимость выходного сигнала усилителя от изменения положения обкладки конденсатора. Внимательный читатель должен сразу обратить внимание – это же амплитудная модуляция! Действительно, в данной системе мы имеем сигнал x(t), который перемножается с сигналом и усиливается на величину . Следующий шаг – убрать несущую частоту , и мы получим усиленный сигнал x(t) – который пропорционален ускорению. Долгий путь вычислений привел нас к пониманию архитектуры МЭМС-акселерометра.
Архитектура МЭМС акселерометра
Рассмотрим сначала функциональную схему датчика:
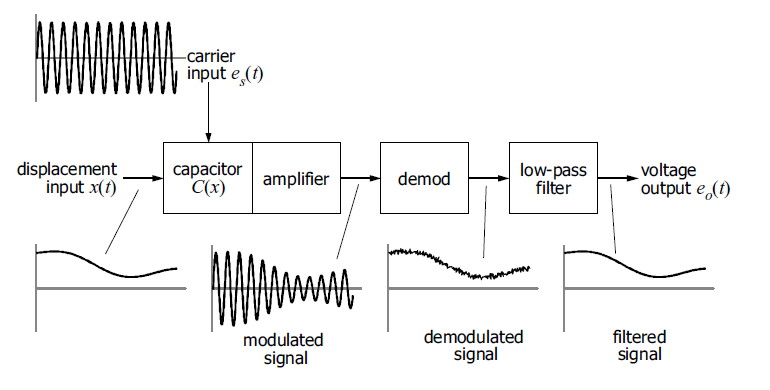
Функциональная схема МЭМС-акселерометра
Изначально у нас есть сигнал x(t) – который отражает изменение ускорения. Далее мы перемножаем его с несущим сигналом и усиливаем с помощью операционного усилителя (в режиме интегратора). Далее происходит демодуляция – простейшая схема – диод и RC фильтр (в реальности используют усложненную схему, синхронизируя процесс модуляции и демодуляции одной несущей частотой ). После чего остатки шума фильтруются с помощью фильтра низких частот.
В качестве примера приведу один из первых МЭМС акселерометров компании Analog Devices – ADXL50:
Структурная схема ADXL50
Наверное, приведя структурную схему датчика в начале статьи многим читателям не было бы понятно назначения некоторых блоков. Теперь завеса приоткрыта, и можем обсудить каждый из них:
- Блок, который называется “MEMS sensor” – является емкостным полумостом.
- Блок “oscillator” генерирует сигнал на частоте 1ГГц.
- Сигнал осциллятора также используется для синхронной демодуляции.
- Выходной усилитель и дополнительные резисторы создают нулевую точку, относительно которой можно смотреть знак изменения ускорения (обычно это VDD/2- половина питания, для биполярных датчиков — «земля»).
- Внешняя емкость определяет полосу измерения системы.
- Внутреннего фильтра низких частот в данной схеме нет, но в современных схемах они имеются.
Какой преобразователь выбрать для работы с датчиками?
Выбор преобразователя для работы с датчиками зависит от точности, которую вы хотите получить. Для работы с датчиками подойдут АЦП с архитектурой SAR или Delta-Sigma с высокой разрядностью. Однако современные датчики обладают встроенными преобразователями. Лидерами этого направления являются STMicroelectronics, Analog Devices и NXP. В качестве примера, можно привести новую микросхему с 3-х осевым акселерометром и встроенным АЦП – ADXL362.

Структурная схема ADXL362
Для работы с АЦП в схему добавлены антиэлайзинговые фильтры, чтобы исключить попадания в спектр дополнительных гармоник.
Где достать такие технологии?
Сейчас для fabless компаний доступно множество фабрик, которые предлагают технологии МЭМС. Однако для создания современных микросхем требуется интегрировать емкости с подвижными пластинами в стандартный маршрут проектирования, ведь помимо такой емкости необходимо спроектировать дополнительные блоки (генератор, демодулятор, ОУ и тд) на одном чипе. В качестве примера можно привести фабрики TSMC и XFab, которые предлагают технологию для реализации МЭМС датчика вместе со всей обвязкой. На картинке представлены емкости, которые позволяют создать трехосевой акселерометр:
Трехосевой емкостной полумост от TSMC
В России также существует фабрика по выпуску МЭМС датчиков – “Совтест”, однако предприятие не обладает технологией интегрирования дополнительных схемотехнических блоков, которые необходимы для создания конечного устройства и единственный выход — применять технологию микросборки.
МЭМС-акселерометр разработки Совтест
Какие наработки есть у нашей компании в этом направлении?
У нас есть несколько преобразователей, которые предназначены для работы с датчиками. Из новых продуктов это:
- 5101НВ035 – 16-канальный преобразователь на основе 8-ми Дельта-Сигма АЦП, предназначена для работы с токовыми датчиками
- 1316НХ035 – 4-х канальный интегрирующий преобразователь напряжение-частота (ПНЧ), предназначенный для работы с 3-х осевыми акселерометрами и гироскопами.
Преобразователь напряжение-частота
Для преобразования данных с датчика обычно используются SAR или delta-sigma АЦП, однако существует еще один тип преобразователей — интегрирующие ПНЧ, которые имеют существенные преимущества:
- Занимают меньшую площадь и имеет меньшее потребление при том же показателе линейности и шума.
- Простая архитектура.
- Высокая устойчивость к входному шуму и сигналам помех.
- Устойчивость к шуму и помехам выходного сигнала.
- Возможность передачи данных без обработки на радиочастотный канал связи.
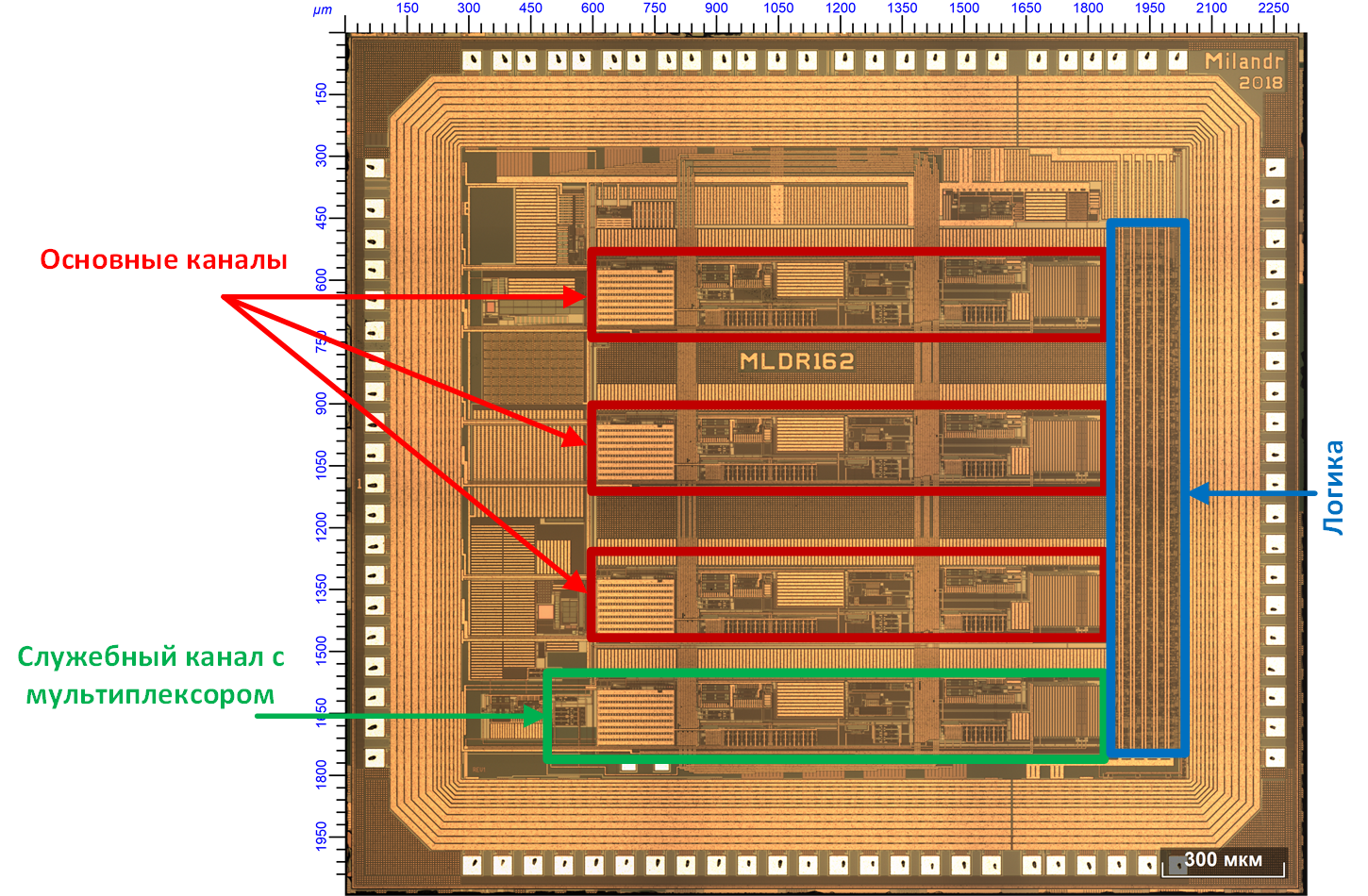
ПНЧ под микроскопом
Каждый из трех основных каналов преобразует входное напряжение в диапазоне ± 4В в частоту до 1250кГц на 3-х выходах, соответствующих положительному и отрицательному входным напряжениям. Также микросхема имеет в каждом канале 16 битный реверсивный счетчик, для подсчета частотных импульсов. SPI интерфейс служит для управления режимами преобразования и выборки содержимого счетчиков импульсов каналов. Основными требованиями к параметрам ПНЧ являлись:
- высокая термо и временная стабильность выходной частоты при нулевом входном сигнале (заземленных входах)
- динамический диапазон преобразования – не менее 22 бит
- непрерывность преобразования входного сигнала и недопустимость потери ни одного частотного импульса.
Есть только одно “но” – биполярное питание. Для обеспечения хорошей стабильности нуля (напряжение, которое соответствует ускорению 0g) необходимо использовать биполярное питание. Такое решение довольно эффективное – ведь когда 0g соответсвует “земля”, система априори будет стабильной. Также это улучшает проектирование системы. В современных датчиках в качестве нуля используют половину питания Vdd/2, однако если значение напряжения на преобразователе будет отличаться от напряжения на датчике – мы автоматически получаем смещение, которое нужно дополнительно калибровать.
Наверное, для многих потребителей биполярное напряжение немного отпугивает, и мы как разработчики это понимаем. Возможно, в дальнейшем сделаем коммерческий вариант для МЭМСов (или интегрируем датчик в ПНЧ). Пока, конечно, это всего лишь планы, но уверен они увидят свет.
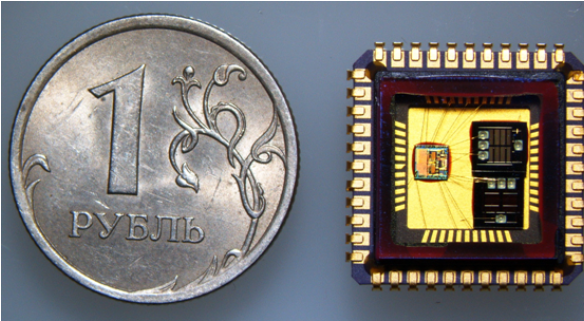
P.S. Нашел бонусные фотографии с процесса исследования образцов. Вообще это, как по мне, самое интересное в процессе разработки. Тебе дают в руки твое детище с пылу жару с завода, ты подаешь на него питание и скрестив пальцы ждешь – “работает или нет?”.

P.P.S. Кому понравилась тема датчиков, в будущем коллега из центра проектирования аппаратуры хотел бы рассказать про создаваемую инерциальную систему на основе МЭМС датчиков — БИНС.
- мэмс
- микроэлектроника
- датчики движения
- акселерометр
MEMS-акселерометры и гироскопы — разбираемся в спецификации
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense. Когда все слова в отдельности понятны, но взаимосвязь их запутана до невозможности. Началось всё с параметра LSB, про который я только смутно помнила, что в переводе это Least Significant Bit. Дальше пошли “Resolution”, “Sensitivity”, а ещё дальше я поняла, что получающийся текст уже можно озаглавить “Datasheet для чайников”.
Немного об основных блоках инерционного модуля.
MEMS-гироскоп
MPU-9250 состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z- осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации (, которое фиксируется емкостным датчиком. Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения [Время Электроники]. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения. Данный сигнал оцифровывается с помощью встроенного в плату 16-битного АЦП. Скорость оцифровки (sample rate) может программно варьироваться от 3.9 до 8000 выборок в секунду (samples per second, SPS), а задаваемые пользователем фильтры низких частот (LPF) предоставляют широкий диапазон возможных частот среза. ФНЧ нужен, в том числе, чтобы убирать вибрации от моторов (как правило, выше 20-25 Гц).
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси. Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
И сразу про трёхосевой MEMS-магнетометр
Основан на высокоточной технологии эффекта Холла. Включает в себя магнитные сенсоры, определяющие напряжённость магнитного поля земли по осям, схему управления, цепь усиления сигнала и вычислительную схему для обработки сигналов с каждого датчика. Каждый АЦП имеет разрешение 16 бит, диапазон измерений . Для измерения слабых магнитных полей применяют либо единицу в системе СИ микротесла (мкТл), либо гаусс (Гс, система СГС): , [Радиолоцман]).
Итак, что такое LSB и как его посчитать? Инструкция по добыче
Допустим, наш акселерометр сейчас работает в диапазоне измерений , то есть полный размах возможных значений будет . Соответствующие им значения напряжений оцифровываются 16-битным АЦП, который может разбить весь интервал максимально на ступеней. Минимальный инкремент, который можно засечь, — это как раз одна ступенька . Тут надо помнить, что счёт ведётся с нуля, так что на самом деле максимально измеряемое значение будет . То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом чувствительность (иногда называется масштабным коэффициентом, sensitivity scale factor) датчика на конкретном диапазоне будет определяться как соотношение электрического выходного сигнала и механического воздействия. Традиционно указывается для частоты сигнала 100 Гц и температуры Для MPU-9250 чувствительность составляет ступеней на каждые g или (, ), для другого IMU, BMI088 от Bosch Sensortec, чувствительность гироскопа высчитывается так же, а для акселерометра используется ступеней на каждое g.

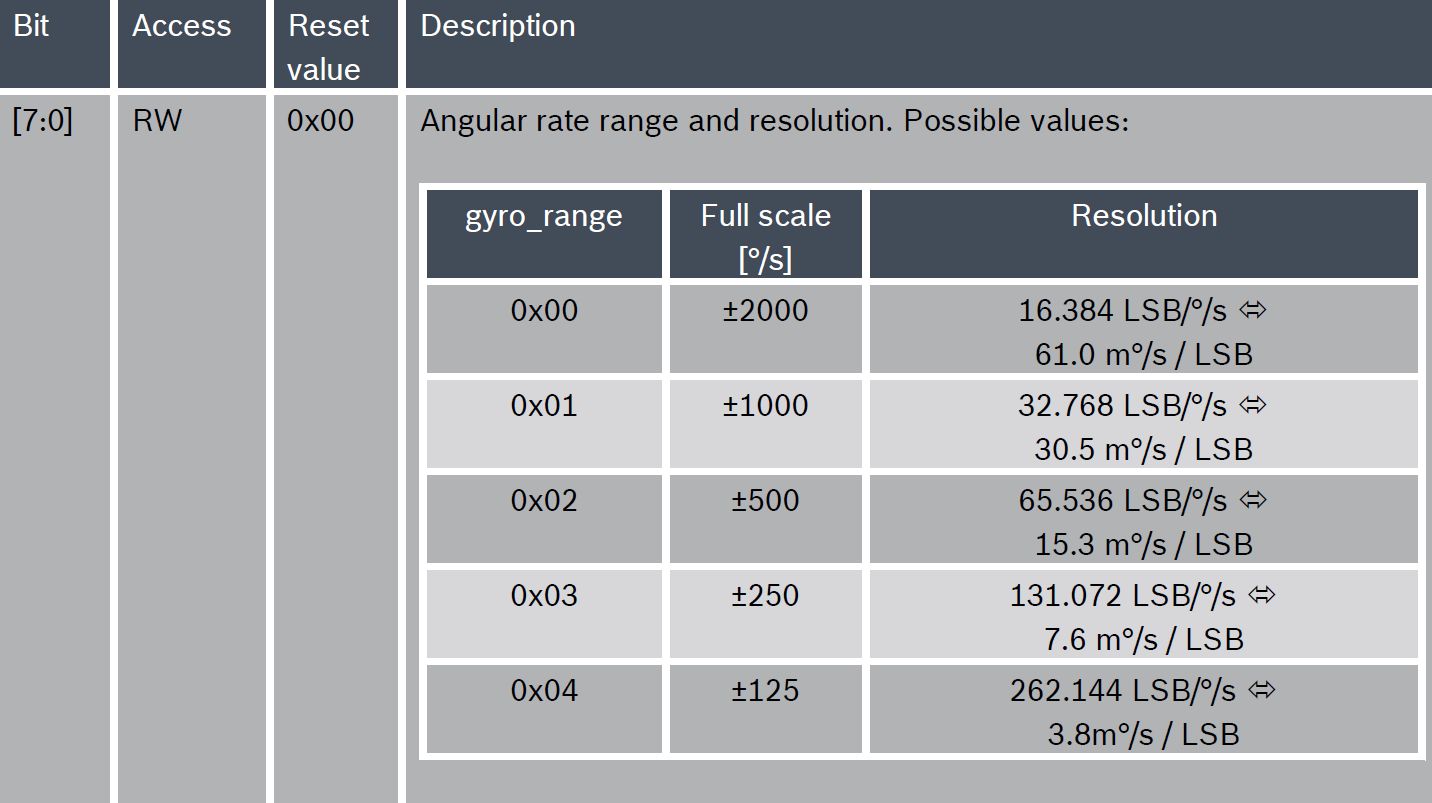
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.

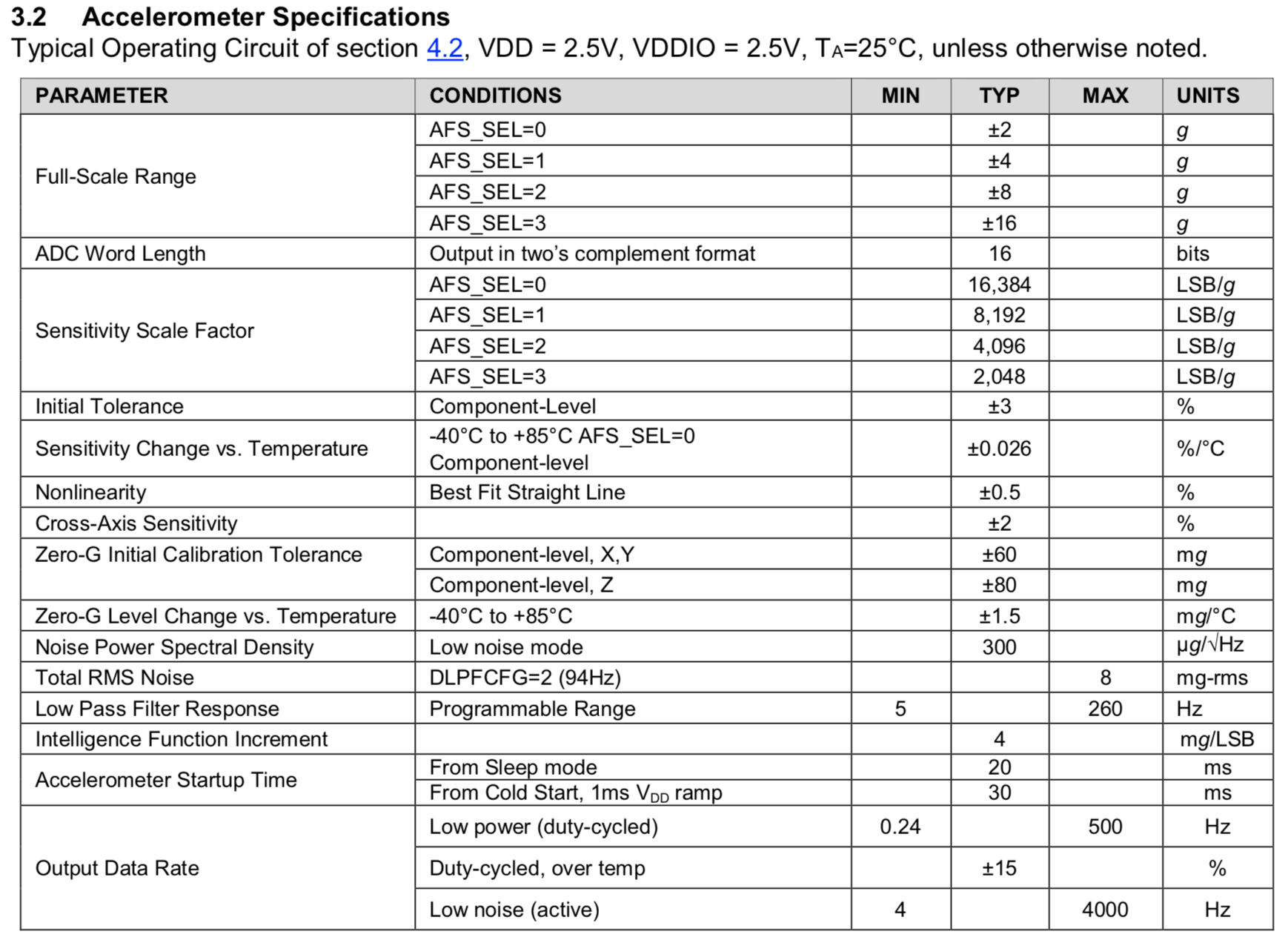
FS для акселерометров я брала ещё и из документации на BMI088 (см. ниже).
| Гироскоп, 16 бит | Акселерометр, 16 бит | ||
|---|---|---|---|
| Диапазон (FS), (dps) | LSB, (dps) | Диапазон (FS), g | LSB, mg |
| (FS = 250) | 0,004 | (FS = 4) | 0,06 |
| (FS = 500) | 0,008 | (FS = 6) | 0,09 |
| (FS = 1000) | 0,0015 | (FS = 8) | 0,12 |
| (FS = 2000) | 0,03 | (FS = 12) | 0,18 |
| (FS = 4000) | 0,06 | (FS = 16) | 0,24 |
| (FS = 24) | 0,37 | ||
| (FS = 32) | 0,48 | ||
| (FS = 48) | 0,73 | ||
Всё, вроде бы, встало на свои места, можно идти дальше. В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.

Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.
Какие бывают характеристики шума и откуда что берётся?
Источники шума можно в общем разбить на электронный шум схемы, преобразующей движение в сигнал напряжения (джонсоновский тепловой шум, дробовой шум, розовый 1/f фликкер-шум и т.д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы (собственной частоты колебаний сенсора ).
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Уровни шума можно определять несколькими способами. Можно рассматривать их во временной или частотной области (после преобразования Фурье). В первом случае берут остаточный шум как среднеквадратичное значение сигналов от неподвижного датчика (по факту это стандартное отклонение для выборки при ) за некоторый промежуток времени:
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение. Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Для белого шума отношение амплитуды (мгновенного пикового значения) к среднеквадратчному с вероятностью 99.9% составляет Называется такое отношение крест-фактором (crest factor, cross ratio). Можно выбрать вероятность 95.5% — крест фактор будет равен 4.

На деле же сигналы шума ведут себя не так хорошо и могут выдавать пики, увеличивающие крест-фактор до 10 раз. В некоторых спецификациях можно найти значения или сам множитель.
В узкой низкочастотной полосе 0.1-10 Гц основную роль играет фликкер-шум “1/f”, для оценки которого используют значение размаха шумового сигнала (peak-to-peak).
Спектральная плотность
Иногда сигнал удобнее рассматривать в частотной области, где его описание называется спектром (зависимость амплитуды и фазы от частоты). Одна из возможных характеристик шума в спецификациях зовётся power spectral density of noise (PSD), noise spectral density, noise power density, или попросту noise density). Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как Средняя мощность, рассеиваемая сигналом в течение промежутка времени
Мощность – скорость поступления энергии. Через энергию определяются детерминированные и непериодические сигналы. Периодические и случайные сигналы выражаются через мощность, поскольку они не ограничены по времени и, соответственно, энергии, при этом в любой момент времени их средняя мощность отлична от нуля
Можно вспомнить [Sklyar], что произвольный периодический сигнал выражается через комбинацию бесконечного числа гармоник с возрастающими частотами:
что после представления косинуса и синуса в экспоненциальной форме
и замены можно записать в виде
где комплексные коэффициенты (спектральные компоненты) ряда Фурье для ,
В общем случае эти коэффициенты представимы следующим образом:
Амплитудным и фазовым спектром называют графики зависимости и от частоты. Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот:
и имеет размерность Средняя нормированная мощность действительного сигнала будет
Непериодические случайные сигналы (в частности, шум) можно описать как периодические в предельном смысле. Если стремится к бесконечности, последовательность импульсов превращается в отдельный импульс , число спектральных линий стремится к бесконечности, график спектра превращается в гладкий спектр частот Для данного предельного случая можно определить пару интегральных преобразований Фурье
Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.
Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю (), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Смотрим в спецификации — там на самом деле под именем спектральной плотности указан квадратный корень из неё с соответствующей размерностью или То есть значение RMS шума без указания полосы частот, на которой он считался (Bandwidth), бессмысленно.
Чуть подробнее про выбор полосы пропускания
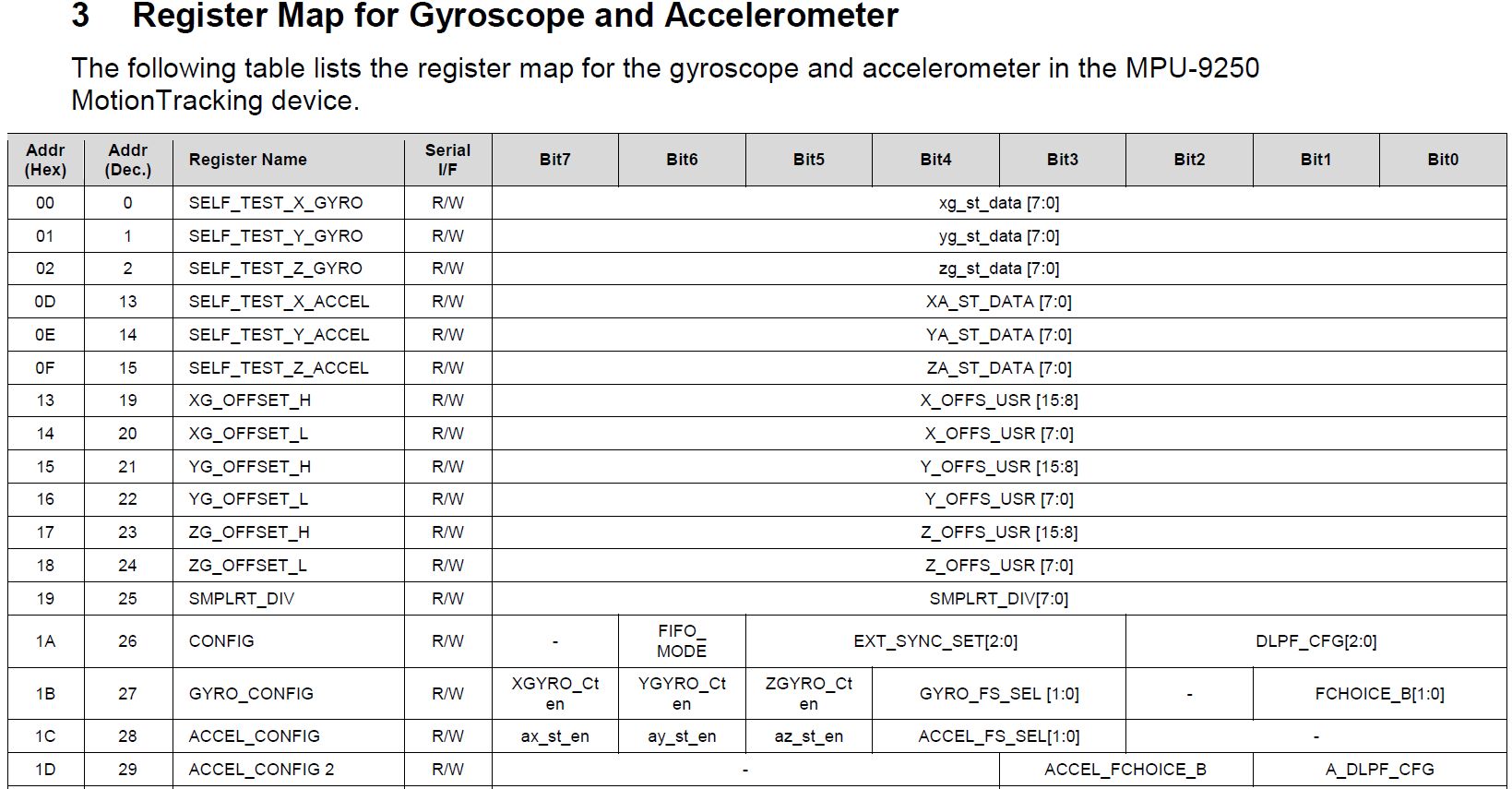
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
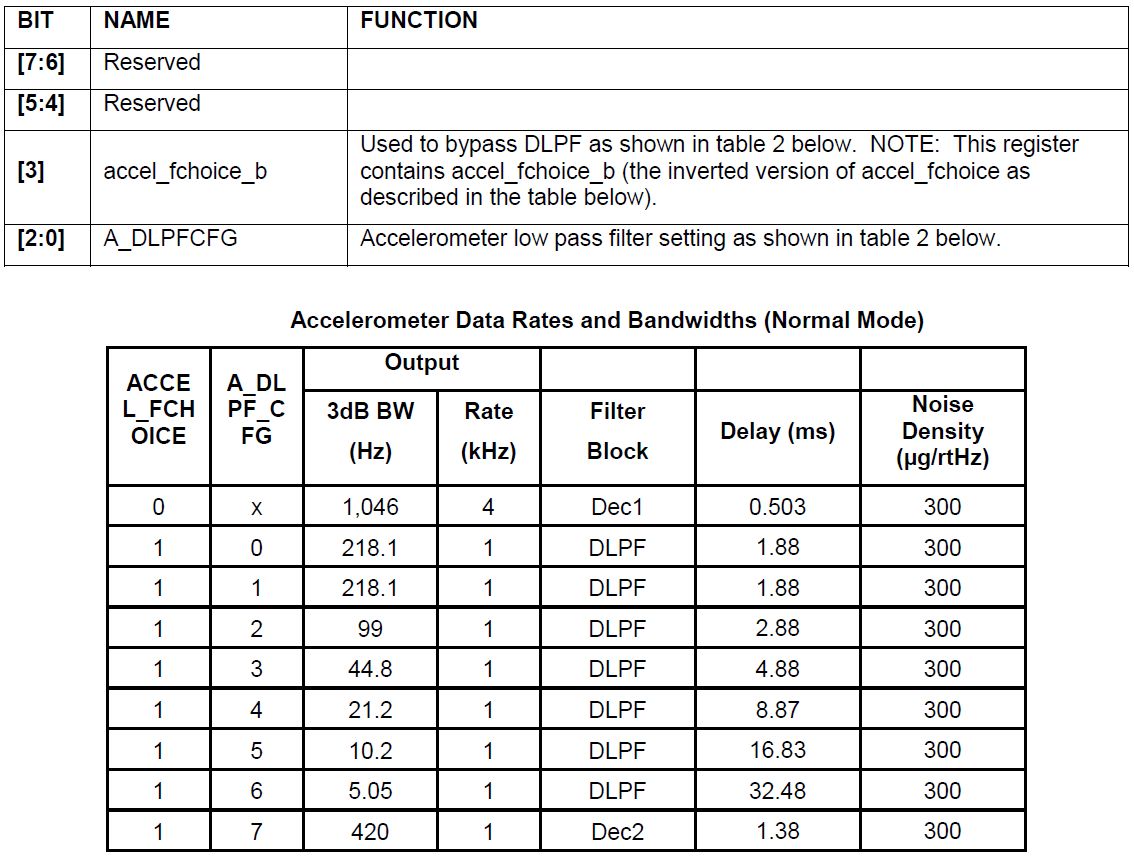
Опуская технические подробности конфигурирования, можно сказать следующее. В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.

В таблицу режимов фильтра акселерометра добавилась колонка «Плотность шума» в , а “Bandwidth” колонка дополнилась значением “3dB”.
Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
Частота дискретизации + децимация -АЦП = скорость обновления данных (digital output data rate, ODR)
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8.714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
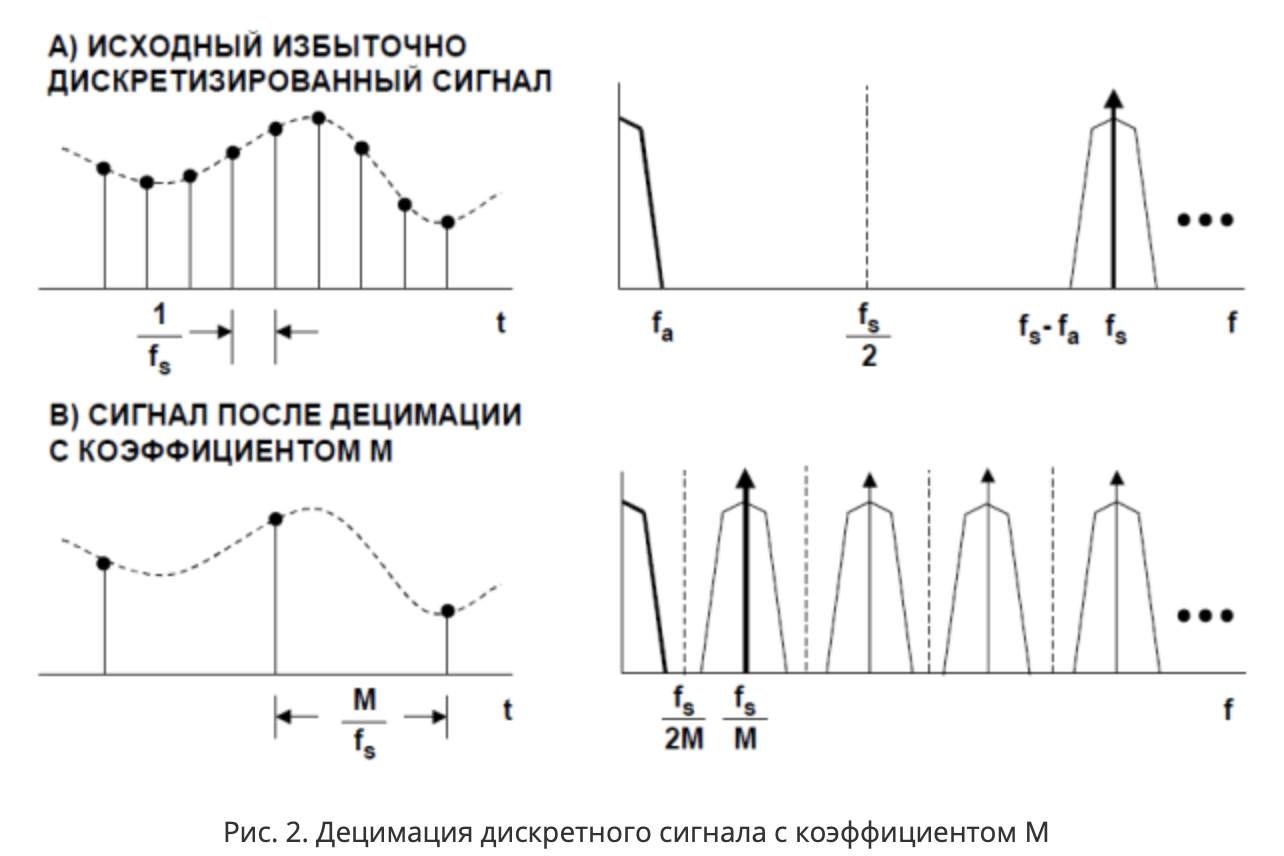
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
Согласно спецификации на MPU-9250, акселерометры снабжены сигма-дельта АЦП. Схемы на его основе потребляют минимальную мощность. Надо отметить, что полоса пропускания у данных преобразователей весьма узкая, не превышает звукового диапазона [Easyelectronics], но для штатного квадрокоптера больше и не нужно. Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал. В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
Для акселерометров MPU-9250 границы полосы пропускания определяются так, чтобы внутри диапазона спектральная плотность сигнала отличалась от пиковой (на частоте 0 Гц) не больше, чем на -3дБ. Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
.
Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания. Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.
Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
Оценить разрешение для каждой полосы пропускания можно по пиковому шуму Среднеквадратичная величина шума на выходе связана с указанной в спецификации спектральной плотностью (а вернее, корнем из неё) и эквивалентной шумовой полосой пропускания (equivalent noise bandwidth, ENBW, — полоса пропускания эквивалентной системы, имеющей прямоугольную АЧХ и одинаковые с исходной системой значение на нулевой частоте и дисперсию на выходе, при воздействии на входы систем белого шума):
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра:
Судя по исследованию в [MPU9250_DLPF], наш выбор 1.57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
| MPU-9250 | BMI088 | ||||
|---|---|---|---|---|---|
| Гироскоп | |||||
| 523 | 0.41 | 1.6 | |||
| 250 | 0.2 | 0.8 | 230 | 0.27 | 1.1 |
| 184 | 0.17 | 0.69 | 116 | 0.19 | 0.76 |
| 92 | 0.12 | 0.49 | 64 | 0.14 | 0.57 |
| 41 | 0.08 | 0.32 | 47 | 0.12 | 0.49 |
| 20 | 0.06 | 0.23 | 32 | 0.1 | 0.4 |
| 10 | 0.04 | 0.16 | 23 | 0.09 | 0.34 |
| 5 | 0.03 | 0.11 | 12 | 0.06 | 0.25 |
| Акселерометр | |||||
| 218.1 | 5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44.8 | 2.5 | 10 | 80 | 1.8 | 7 |
| 21.2 | 1.7 | 7 | 40 | 1.3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0.9 | 4 |
| 5.05 | 0.9 | 3.4 | 10 | 0.6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0.5 | 1.8 |
| 1046 | 12.3 | 49 | |||
Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
| MPU-9250 | BMI088 | ||
|---|---|---|---|
| Гироскоп, 16 бит | |||
| Диапазон (FS), (dps) | Разрешение, бит (BW=92Hz) | Диапазон (FS), (dps) | Разрешение, бит (BW=64Hz) |
| 8 | |||
| 9 | 9 | ||
| 10 | 10 | ||
| 11 | 11 | ||
| 12 | 12 | ||
| Акселерометр | |||
| Диапазон (FS), g | Разрешение, бит | Диапазон (FS), g | Разрешение (по X,Y), бит |
| 6 | 8 | ||
| 7 | 9 | ||
| 8 | 10 | ||
| 9 | 11 | ||
И это лишь самые основные параметры.
Откуда что бралось:
- Самый приятный документ от Freescale Semiconductor — «How Many Bits are Enough?»
- [EE] — «Resolution vs Accuracy vs Sensitivity Cutting Through the Confusion»
- [Время электроники] — «МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы»
- [LSB] — «An ADC and DAC Least Significant Bit (LSB)»
- [Measurement Computing] — «TechTip: Accuracy, Precision, Resolution, and Sensitivity»
- [KIT] — «Акселерометры Analog Devices — устройство и применение»
- [Easyelectronics] — «Сигма-дельта АЦП»
- [Радиолоцман] — «Магнитометры: принцип действия, компенсация ошибок»
- [SO] — «Noise Measurement»
- [Mide] — «Accelerometer Specifications: Deciphering an Accelerometer’s Datasheet»
- [CiberLeninka] — Delta-Sigma ADC Filter
- [SciEd] — «Особенности реализации цифровой фильтрации с изменением частоты дискретизации»
- [MPU6050] — «Using the MPU6050’s DLPF»
- [MPU9250_DLPF] — MPU9250 Gyro Noise DLPF work investigation
- Understanding Sensor Resolution Specifications
- Siemens Digital Signal Processing
- МЭМС-датчики движения от STMicroelectronics
- [TMWorld] — «Evaluating inertial measurement units»
- [Sklyar] – Скляр Б. Цифровая связь. Теоретические основы и практическое применение.