Подготовка к работе ТРМ101
4.1. Не закрывать боковые стенки прибора для обеспечения нормального теплообмена.
4.2. Использовать только указанное напряжение питания 90…245 В переменного тока с частотой 47. 63 Гц. Подключение прибора к сети осуществлять через дополнительный выключатель с предохранителем, рассчитанным на 1 А.
4.3. При подключении сети питания рекомендуется использовать стабилизатор и помехоподавляющий фильтр, располагая их как можно ближе к прибору.
4.4. Не допускать параллельного расположения и тем более свивания линий связи «прибор – датчик» с высоковольтными линиями питания и линиями, проводящими большие токи. Поэтому при прокладке линий связи следует использовать раздельные трубы, каналы и экранированные кабели.
4.5. Запрещается эксплуатировать прибор в помещениях, предрасположенных к конденсации влаги, попаданию пыли, с газами и веществами, способствующими коррозии, вибрацией, ударами, брызгами масла или влаги.
4.6. Размещать прибор следует как можно дальше от оборудования, генерирующего высокочастотные излучения (индукционные печи и т.п.), а также от телее, радиопередающего и приемного оборудования.
4.7. Нагрузка, подключаемая к выходным устройствам прибора, должна соответствовать указанной в технических характеристиках (см. разд. 2). Кроме этого, необходимо при подключении нагрузки соблюдать рекомендации, указанные в п. 3.2.8, стр. 20–21.
5. Подготовка прибора к работе
5.1. Монтаж прибора на объекте
5.1.1. Проверить состояние корпуса: корпус не должен иметь механических повреждений, лицевая панель — царапин, трещин, грязных пятен.
Пластина, закрепляющая кнопки управления, должна плотно прилегать к лицевой панели прибора, вентиляционные щели должны быть чистыми, без посторонних предметов в них. Проверить чистоту и целостность клемм выходного разъема.
5.1.2. Подготовить на щите управления с толщиной панели 1. 10 мм место для установки прибора в соответствии с чертежами, приведенными в прил. А. Конструкция щита должна обеспечивать защиту от попадания внутрь прибора влаги, грязи и посторонних предметов через вентиляционные щели корпуса.
В одном щите может быть установлено несколько приборов. При этом необходимо выдерживать минимальное расстояние между каждым прибором (см. прил. А, стр. 42).
5.1.3. Вставить прибор в подготовленное место, между прибором и лицевой панелью щита установить резиновое уплотнение, имеющееся в комплекте поставки.
5.1.4. Закрепить прибор на щите зажимом с помощью крепежного хомута (рис. А.1). Для этого нужно продвинуть крепежный хомут вдоль корпуса прибора по направлению от клемм к щиту и установить его в таком положении, чтобы передняя панель прибора была плотно прижата к щиту.
5.2. Монтаж внешних связей
5.2.1. Общие указания
5.2.1.1. Подготовить кабели для соединения прибора с датчиками, исполнительными механизмами и внешними устройствами, а также с источником питания. Для обеспечения надежности электрических соединений рекомендуется использовать кабели с медными многопроволочными жилами, концы которых передподключениемследуеттщательно зачистить и облудить. Зачистку жил кабеля необходимо выполнять с таким расчетом, чтобы ихоголенные концы после подключения к прибору не выступали за пределы клеммника. Сечение жил кабеля не должно превышать 0,75 мм2.
5.2.1.2. Линии связи «прибор — датчики» выделить в самостоятельную трассу (или несколько трасс), отделенную(ые) от силовых кабелей, создающих высокочастотные и импульсные помехи.
5.2.1.3. Для защиты входного устройства ТРМ 101 от влияния промышленных электромагнитных помех линии связи «прибора — датчики» следует экранировать. В качестве экранов могут быть использованы как специальные кабели с экранирующими оплетками, так и заземленные стальные трубы подходящего диаметра. Экраны кабелей следует подключить к заземленному контакту в щите управления.
5.2.2. Подключение прибора
Подключение прибора следует выполнять по схемам, приведенным в прил. Б, соблюдая при этом нижеизложенную последовательность действий:
а) произвести подключение прибора к исполнительным механизмам и внешним устройствам, а также к обесточенному источнику питания;
б) подключить линии связи «прибор — датчики» к первичным преобразователям;
в) подключить линии связи «прибор — датчики» ко входам ТРМ 101.
ВНИМАНИЕ! Для защиты входных цепей ТРМ101 от возможного пробоя зарядами статического электричества, накопленного на линиях связи «прибор — датчики», перед подключением к клеммнику прибора ихжил ы следует на 1. 2 с соединить с винтом заземленного щита.
После выполнения указанных работ прибор готов к опробованию.
5.3. Включение и опробование прибора
5.3.1. После подключения необходимых связей подать питание на прибор.
5.3.2. Если прибор исправен, полностью засвечиваются индикаторы и светодиоды, выходные устройства находятся в состоянии «Выключено» и через 3 секунды прибор переходит в режим РАБОТА, начиная опрос входного датчика и формирование управляющих выходных сигналов.
5.3.3. Перед началом эксплуатации необходимо:
— запрограммировать прибор (см. разд. 6);
— провести автонастройку (разд. 7.1);
— при необходимости провести ручную настройку (разд. 7.2).
5.3.4. При наличии некоторых неисправностей прибор выводит на нижний цифровой индикатор следующие сообщения:
— Еrr.S — ошибка на входе (например, обрыв, короткое замыкание датчика, его неправильное подключение; а также выход за верхний или нижний пределы измерения;
— Еr.64 — ошибка процессора;
— Er.Ad — ошибки внутреннего преобразования.
Более подробное описание и способы устранения этих ошибок, а также другие неисправности приведены в прил. Д, стр. 51 — 52.
6. Программирование прибора
6.1. Общие сведения
6.1.1. После первого включения и опробования прибора необходимо отключить питание исполнительных устройств, после чего задать нужные значения программируемым параметрам.
6.1.2. Основные параметры прибора ТРМ101 объединены в 4 группы LuoP, init, Adu и Conn, составляющие меню прибора (рис. 24). Полный список программируемых параметров приведен в прил. Г, стр. 46 — 50.
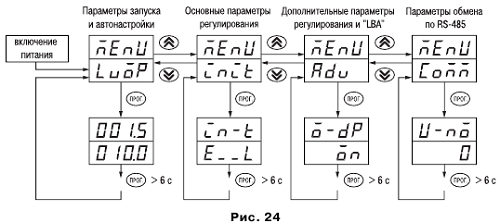
В группе LuoP находятся параметры, управляющие запуском регулирования, включением автонастройки, параметр индикации выходного сигнала регулятора, а также уставка.
В группе init находятся параметры настройки входа прибора, выходных устройств, устройств сигнализации.
В группе Adu находятся параметры дополнительных настроек ПИД-регулятора.
Параметры настройки интерфейса RS-485 расположены в группе Conn.
Примечание. Существуют еще три группы служебных параметров, вход в которые осуществляется через коды доступа (см. п. 6.2.8, стр. 34).
6.1.3. Переход между заголовками групп меню осуществляется кнопками «∧» (к следующему) и «∨» (к предыдущему). Переход к первому параметру каждой группы осуществляется кратким нажатием кнопки [ПРОГ], а возврат в заголовок группы (из любого параметра группы) – длительным (3 с) нажатием кнопки [ПРОГ].
Для входа в специальные режимы работы прибора используются комбинации кнопок:
– [ПРОГ] + «∧» + «∨» – для перехода к установке кодов доступа, на индикаторе получаем изображение
PASS 0
– [ПРОГ] + «∨» – для сдвига отображаемого значения программируемого параметра, единицей измерения которого является температура, вправо;
– [ПРОГ] + «∧» – для сдвига отображаемого значения программируемого параметра, единицей измерения которого является температура, влево.
6.2. Порядок программирования
6.2.1. Установка параметров основного (измерительного) входа
Работа измерительного входа описана в разд. 3.2.2, стр. 10 – 13
Находясь в режиме РАБОТА, нажать кнопку [ПРОГ] и удерживать не менее 3 с, прибор попадает в меню LuoP.
Нажать кнопку «∧», прибор переместится в меню init.
6.2.1.1. Код типа датчика
Нажать кнопку [ПРОГ] и удерживать ~3 с, задать значение параметра init в соответствии с используемым типом датчика (см. табл. 8).
| Значение параметра init | Тип датчика | Диапазон измерения |
| r385 | ТСП50 с W100 = 1,385 | -200. +750 °С |
| r.385 | ТСП100 c W100 = 1,385 (Pt 100) | -200. +750 °С |
| r391 | ТСП50 с W100 = 1,391 | -200. +750 °С |
| r.391 | ТСП100 W100 = 1,391 | -200. +750 °С |
| r-21 | ТСП гр. 21 (R0 = 46 Ом, W100 = 1.391) | -200. +750 °С |
| r426 | TCM50 W100 = 1,426 | -50. +200 °С |
| r.426 | TCM100 W100 = 1,426 | -50. +200 °С |
| r-23 | TCM гр. 23 (R0 = 53 Ом, W100 = 1,426) | -50. +200 °С |
| r428 | TCM50 W100 = 1,428 | -190. +200 °С |
| r.428 | ТСМ100 W100 = 1,428 | -190. +200 °С |
| E-A1 | термопара TBP (А-1) | 0. +2500 °С |
| E-A2 | термопара TBP (А-2) | 0. +1800 °С |
| E-A3 | термопара TBP (А-3) | 0. +1800 °С |
| E—b | термопара ТПР (В) | +200. +1800 °С |
| E__i | термопара ТЖК (J) | -200. +1200 °С |
| E__K | термопара ТХА (К) | -200. +1300 °С |
| E__L | термопара ТХК (L) | -200. +800 °С |
| E__n | термопара ТНН (N) | -200. +1300 °С |
| E__r | термопара ТПП (R) | 0. + 1750 °С |
| E__S | термопара ТПП (S) | 0. + 1750 °С |
| E__t | термопара ТМК (Т) | -200. +400 °С |
| i0_5 | ток 0. 5мА | -5. 105% |
| i0.20 | ток 0. 20 мА | -5. 105% |
| i4.20 | ток 4. 20 мА | -5. 105% |
| U-50 | напряжение -50. +50 мВ | -5. 105% |
| U0_1 | напряжение 0. 1 В | -5. 105% |
Коды термопреобразователей сопротивления начинаются с латинской строчной буквы r (resistor — сопротивление), после которой стоит значение W100. Например, код r.385 соответствует датчику ТСП 100 с W100 = 1,385. Для датчиков с R0 = 100 Ом в коде после буквы r стоит точка, перед наименованием градуировки — тире.
Коды термопар начинаются с прописной латинской буквы Е (ЭДС), после которой стоит обозначение НСХ термопары. Например, E_A2 соответствует термопаре ТВР(А-2).
Коды датчиков с выходным сигналом в виде тока и напряжения начинаются с букв i (ток) и U (напряжение), соответственно, после которых указаны границы диапазона выходного сигнала. Например, i0_5 соответствует датчику с выходным сигналом постоянного тока 0. 5 мА.
6.2.1.2. Установка диапазона измерения
При использовании датчиков с унифицированным выходным сигналом тока или напряжения необходимо провести настройку диапазона измерения, задав значения параметров:
dР — положение десятичной точки;
in-L — нижняя граница диапазона измерения;
iп-Н — верхняя граница диапазона измерения.
Примечание. При использовании температурных датчиков эти параметры на индикаторе не появляются.
Параметры in-Н могут принимать любые значения
от -999 до 9999 при dP = 0;
от -99.9 до 999.9 при dP = 1;
от -99.9 до 99.99 при dP = 2
при условии, что in-L < in-H.
Значение параметра dP влияет на отображение измеренной величины и остальных параметров, имеющих те же единицы измерения, что и измеряемая величина.
Для получения более высокой разрешающей способности следует устанавливать большее значение dР. Например, для использования датчика давления с диапазоном 0. 15 атмосфер и выходным сигналом тока 0. 20 мА наилучшие результаты могут быть получены следующими значениями параметров in-L = 0.00 и iп-Н = 15.00 при dP = 2.
6.2.1.3. Коррекция измерительной характеристики
Коррекция измерений, осуществляемая прибором, описана в разд. 3.2.5, стр. 14-15
Коррекция измерений производится прибором после задания необходимых значений параметров SН — сдвиг измерительной характеристики, KU — наклон измерительной характеристики.
Параметр SН допускается изменять в диапазоне -50.0. +50.0 °С для температурных датчиков (ТСП, ТСМ и термопар), -500. 500 для аналоговых.
Коэффициент наклона KU допускается изменять в пределах от 0.80 до 2.00.
ВНИМАНИЕ!
1. Необходимостьустановки коррекции измерения выявляется после проведения поверки используемых датчика и прибора.
2. При подключении термопреобразователя сопротивления по двухпроводной линии параметр SН задавать обязательно. Определение значения параметра SН производится по методике, приведенной в прил. В, стр. 45.
6.2.2. Установка параметров цифрового фильтра
Работа цифрового фильтра описана в разд. 3.2.4, стр. 13 — 14
6.2.2.1. Настройка цифрового фильтра измерений производится путем установки двух параметров Fb — полоса фильтра и inF— постоянная времени фильтра. Оптимальное значение постоянной времени фильтра inF определяется при проведении предварительной автонастройки (см. разд. 7.1, стр. 35 — 37).
6.2.2.2. Значение inF допускается устанавливать в диапазоне 0. 99 с, при inF = 0 фильтрация методом экспоненциального сглаживания отсутствует.
Значение полосы фильтра устанавливается в диапазоне 0. 9999 °С/с. При Fв = 0 «ограничитель единичных помех» выключен.
6.2.3. Установка параметров процесса регулирования
Работа ПИД-регулятора и принципы регулирования по ПИД-закону приведены в разд. 3.2.6, стр. 15 – 17
6.2.3.1. Задание уставки регулируемой величины
6.2.3.1.1. Изменение уставки осуществляется изменением значения параметра SP.
6.2.3.1.2. Диапазон установки SP ограничивается параметрами SL-L и SL-H.
SL-L – нижняя граница диапазона задания уставки;
SL-H – верхняя граница диапазона задания уставки.
Параметр SL-L может принимать значения от нижней границы диапазона измерения используемого датчика (см. табл. 8) до SL-H.
Параметр SL-H может принимать значения от SL-L до верхней границы диапазона измерения для используемого датчика (см. табл. 8).
Примечание. Для термопар, у которых верхняя граница диапазона измерения превышает 1000 °С, параметры SP, SL-L, SL-H, An-L, An-H могут иметь значения более 1000 °С. Эти значения выводятся на индикатор без старшего разряда, нижний индикатор при этом мигает 800.0. При одновременном нажатии кнопок [ПРОГ] + «∨» значение параметра сдвигается вправо, индикатор мигать прекращает 1800.
Для отображения десятых долей необходимо одновременно нажать [ПРОГ] + «∧».
6.2.3.2. Дополнительные настройки регулятора
6.2.3.2.1. Зона нечувствительности задается в параметре dB.
Параметр db устанавливается в единицах измерения входной величины в диапазоне 0. 10 °С или %. Зона нечувствительности не должна превышать допустимое отклонение регулируемой величины от уставки, заданное в параметре dBx.
6.2.3.2.2. Ограничения выходного сигнала осуществляются параметрами oL-L, oL-H и orL.
Ограничение минимального значения выходного сигнала oL-L устанавливается в процентах и может принимать значения от 0 до 40. Если рассчитанное значение выходного сигнала меньше установленного в параметре oL-L, на выход регулятора будет выдан сигнал oL-L (%).
Ограничение максимального значения выходного сигнала oL-Н устанавливается в процентах и может принимать значения от 60 до 100. Если рассчитанное значение выходного сигнала больше установленного в параметре oL-Н, на выход регулятора будет выдан сигнал oL-H (%).
Ограничение изменения скорости выходного сигнала устанавливается в параметре orL и определяет максимально допустимую скорость изменения выходного сигнала, устанавливается в процентах в секунду (%/сек).
6.2.4. Установка параметров ВУ прибора
Работа ВУ прибора описана в разд. 3.2.8, стр. 20 — 21
6.2.4.1. На каждое устройство прибора ВУ1 и ВУ2 может быть подан сигнал компаратора, устройства «LBA», значение выходного сигнала регулятора или значение измеренной величины. Сигнал, поступающий на выходы прибора определяется значениями параметров out1 — для ВУ1 и out2 — для ВУ2. ВУ1, как правило, используется для регулирования, а ВУ2 для сигнализации. По желанию пользователя их назначение может быть изменено (см. табл.).
Примеры использования выходов
Примеры использования выходов ТРМ101 различных модификаций приведены в табл. 9.
| Модификация | ВУ1 | ВУ2 | ||
| Тип устройства | Рекомендации | Тип устройства | Рекомендации | |
| ТРМ101-РР | э/м реле | регулирование | э/м реле | сигнализация |
| ТРМ101-РИ | э/м реле | то же | ЦАП 4. 20 мА | регистрация |
| ТРМ101-КР | транз. оптопара | — » — | э/м реле | сигнализация |
| ТРМ101-КИ | — » — | — » — | ЦАП | регистрация |
| ТРМ101-СР | симист. оптопара | — » — | э/м реле | сигнализация |
| ТРМ101-СИ | — » — | — » — | ЦАП | регистрация |
| ТРМ101-ИР | ЦАП 4. 20 мА | — » — | э/м реле | сигнализация |
| ТРМ101-ИИ | — » — | — » — | ЦАП | регистрация |
| ТРМ101-СС | симист. оптопара | регулирование | симист. оптопара | сигнализация |
| ТРМ101-КК | транз. оптопара | регулирование | транз. оптопара | сигнализация |
6.2.4.2. Установка типа сигнала
Параметры «сигнал, поступающий на ВУ» (out1 и out2) могут принимать следующие значения в зависимости от модификации выходного устройства:
— если ВУ ключевого типа, то
xo – значение выходной мощности ПИД-регулятора;
xlor – сигналы устройств аварийной сигнализации, соединенные по схеме «ИЛИ» (см. п. 6.2.4.1);
xALAn – сигналы устройств аварийной сигнализации, соединенные по схеме «И» (см. п. 6.2.4.1);
xPu – выход отключен,
– если ВУ аналогового типа, то
xo – значение выходной мощности ПИД-регулятора;
xPu – значение измеряемой величины; ВУ используется для регистрации.
6.2.4.3. Настройка диапазона регистрации
При использовании аналогового ВУ как регистратора параметр out1 (out2) Pu необходимо определить диапазон работы ВУ путем установки параметров:
A1-L (A2-L) – нижняя граница диапазона регистрации;
A1-H (A2-H) – верхняя граница диапазона регистрации
Примечание. При других значениях out1 и out2 эти параметры не появляются.
Допустимо задавать любые соотношения этих параметров, кроме An-L = An-H; так как при этом на выходе появляется неопределенный сигнал. Графики работы аналогового измерительного выхода приведены на рис. 25, а (для An-L < An-H) и на рис. 25, б (для An-L >An-H).
Примечание. Здесь n – номер ЦАП.
6.2.5. Настройка компаратора и устройства «LBA»
Работа компаратора и устройства «LBA» описана в разд. 3.2.7, стр. 18 — 19
6.2.5.1. Установка типа логики срабатывания компаратора
6.2.5.1.1. При настройке компаратора необходимо выбрать один из семи типов логики его срабатывания (см. п. 3.2.7.2) и установить требуемое значение параметра ALt (см. табл. Г.1, стр. 48).
6.2.5.1.2. После выбора логики срабатывания необходимо настроить порог срабатывания и гистерезис переключения компаратора — параметры AL-d и AL-H — соответственно.
При установке параметра ALt в значение 0 компаратор будет выключен, параметры AL-d, AL-H недоступны.
Параметры AL-d и AL-H могут принимать значения в диапазоне 0..+999,9 °С для температурных датчиков (ТСП, ТСМ и термопар) и 0. 9999 для аналоговых с учетом положения десятичной точки (параметр dP).
6.2.5.3. Настройка сигнализации LBA
6.2.5.3.1. Для задания времени определения обрыва контура (параметр LbA) необходимо перейти в группу параметров Adu. Время определения обрыва контура LbA измеряется в секундах и может быть вычислено по методике, изложенной ниже.
Вычисление времени определения обрыва контура:
а) установить выходной сигнал на максимальный уровень;
б) измерить время, за которое измеряемая величина изменится на ширину зоны определения обрыва контура (по умолчанию ширина этой зоны 10 °С);
в) увеличить измеренное время вдвое и принять его за время определения обрыва контура.
При значении LbA, равном нулю, сигнализация об обрыве контура оключается.
6.2.5.3.3. Ширина зоны определения обрыва задается в параметре LbAb в единицах измерения входной величины.
По умолчанию значение LbAb равно 10 °С, что во многих случаях является удовлетворительным.
6.2.5.4. Настройка состояния «остановка регулирования»
При остановленном регулировании прибор выдает выходной сигнал, равный значению, установленному в параметре nuSt.
6.2.5.5. Настройка состояния «ошибка регулирования»
При обнаружении какой-либо ошибки прибор прекращает регулирование, и выходной сигнал регулятора принимает значение, определенное в параметре nuEr.
При срабатывании устройства обрыва контура выходной сигнал ПИД-регулятора также принимает значение, определенное параметром nuEr. Выключение сигнала тревоги осуществляется установкой параметра r-S в значение StoP. Возобновление работы регулятора осуществляется установкой параметра r-S в значение rUn.
6.2.6. Настройка параметров дополнительного входа
Функции дополнительного входа и его работа описаны в разд. 3.2.3, стр. 13
6.2.6.1. Для определения функций внешнего ключа Кл1 необходимо задать значение параметра Eu-1;
nonЕ — вход не задействован; замыкание и размыкание ключа не влияет на работу прибора;
r-S — вход выполняет функцию запуска /остановки регулирования: ключ замкнут — «пуск», ключ разомкнут — «стоп».
6.2.6.2. Для определения функции внешнего ключа Кл2 необходимо задать значение параметра Eu-2.
nonЕ — вход не задействован; замыкание и размыкание ключа не влияет на работу прибора;
r-L — вход выполняет переключение дистанционное/местное управление: ключ замкнут — управление от компьютера, ключ разомкнут — автономное управление.
Примечание. Параметры r-S и r-L при установке Eu-1 и Eu-2, соответственно, в значении nonЕ при программировании не видны.
6.2.7. Установка индикации выходного сигнала
6.2.7.1. В процессе регулирования имеется возможность контролировать текущее значение выходного сигнала регулятора. Для этого необходимо перейти к параметру o, находящемуся в группе LuoP. Этот параметр является индицируемым, т.е. его значение определяется прибором в процентах (%) и меняется каждую секунду по результатам опроса датчика.
Разрешение индикации выходного сигнала и наличие параметра в группе LuoP устанавливается в параметре o-dP:
on — просмотр текущего значения выходного сигнала разрешен, параметр о появляется в группе LuoP,
oFF — параметр о отсутствует в группе LuoP.
6.2.8. Защита от несанкционированного доступа
Для защиты от нежелательных изменений программируемых параметров существуют два параметра секретности r-L и оAРt, расположенных в группе SECr и осуществляющих защиту программируемых параметров двух видов.
Доступ к этим параметрам осуществляется через код доступа PASS = 100.
6.2.8.1. Запрет изменений параметров. Все программируемые параметры прибора, включая уставку SР, могут быть защищены от несанкционированных изменений кнопками прибора установкой параметра r-L, расположенного в группе SECr, в значение rnt. Тогда значения параметров можно просматривать, но изменить их можно только от управляющего устройства в сети RS-485 (компьютера).
Для снятия запрета изменения значений параметров прибора необходимо установить параметр r-L в значение LCL. Тогда значения параметров можно изменять кнопками и от управляющего устройства в сети RS-485 (компьютера).
Заводская установка параметра r-L — значение LCL.
6.2.8.2. Запрет доступа к параметрам. Пользователь может запретить доступ к параметрам с лицевой панели, т.е. параметры не появляются на индикаторе. Запрет доступа к определенным программируемым параметрам или их группам устанавливается заданием соответствующего значения параметра oAPt, расположенного в группе SECr (табл. 10).
| Параметр | Значение oAPt | ||||
| 0 | 1 | 2 | 3 | 4 | |
| параметр SР | + | + | + | + | — |
| параметр r-S | + | + | + | — | — |
| Группа LuoP | + | + | — | — | — |
| Группы init, Adu, Conn | + | — | — | — | — |
| Примечание. «+» — доступ к параметрам разрешен; «-» — доступ кпараметрам запрещен |
|||||
Независимо от значения параметра oAPt параметры прибора могут быть изменены с помощью управляющего устройства в сети RS-485 (с помощью компьютера).
6.2.9. Настройка обмена данными через интерфейс RS-485
Настройка обмена данными осуществляется параметрами группы Conn:
— bPS — скорость обмена в сети; допустимые значения — 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с;
— U-no — номер прибора в сети.
Прибор ТРМ101 имеет также следующие фиксированные параметры обмена:
Тип адресации 8-разрядный
Количество стоп-бит 1
Длина слова данных 8 бит
Состояние блока четности нет
7. Настройка прибора
7.1. Автонастройка
7.1.1. Общие сведения
7.1.1.1. Автоматическая настройка (автонастройка) преднаначена для оптимальной настройки системы регулирования непосредственно на объекте.
7.1.1.2. Автонастройка в приборе ТРМ101 состоит из двух этапов:
— предварительной настройки регулятора (ПНР);
— точной настройки регулятора (ТНР), или настройки в процессе эксплуатации системы на объекте.
7.1.2. Предварительная настройка
7.1.2.1. Для запуска ПНР необходимо осуществить следующие действия:
1) задать параметру r-S значение rUn;
2) задать параметру Anr значение Pnr;
3) запустить предварительную настройку заданием параметру At значения rUn, при запуске предварительной настройки загорается светодиод «ПН».
7.1.2.2. При предварительной настройке прибор работает как двухпозиционный регулятор. Когда система осуществляет одно колебание, прибор определяет амплитуду DT период этого колебания T = ti + ti (рис. 26).
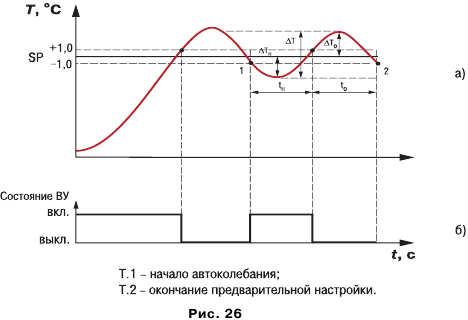
7.1.2.3. Из полученных значений амплитуды и периода автоколебания прибор вычисляет приближенные значения коэффициентов ПИД-регулятора (Xр, tи, tд) для данной системы. После окончания предварительной настройки светодиод «ПН» перестает светиться. Прибор автоматически переходит в режим РАБОТА.
Предварительная настройка позволяет обеспечить работоспособность системы регулирования при найденных значениях параметров.
Кроме того, в процессе предварительной настройки происходит определение постоянной времени входного сглаживающего фильтра tф (см. п. 3.2.4.1, 6.2.2), периода следования управляющих импульсов Тсл (см. п. 3.2.6.6, 6.2.4.4), оптимальной скорости выхода на уставку v уст и допустимого отклонения от уставки dYu.
7.1.3. Точная настройка
Для уточнения настройки системы и ее подстройки в процессе эксплуатации применяется алгоритм точной автонастройки.
7.1.3.1. Для запуска ТНР необходимо:
1) задать параметру r-S значение rUn;
2) задать параметру Anr значение Sin;
3) установить параметр At в значение rUn; при запуске точной настройки загорается светодиод «ТН».
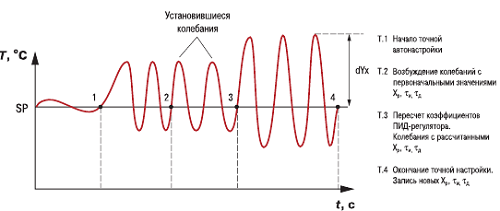
Рис. 27
7.1.3.2. Точная настройка выполняется методом возбуждения (генерации) в системе регулирования синусоидальных колебаний (РСК). Настройка методом РСК требует информации о системе, которую получают в ходе предварительной настройки.
Точная автонастройка производится методом последовательного приближения значений параметров регулятора к оптимальным. По полученным в результате предварительной настройки параметрам х , t, прибор рассчитывает значения амплитуды и периода возбуждаемых колебаний (точка 2 на рис. 27). Если характеристики практически возбуждаемых колебаний не соответствуют рассчетным, то значения коэффициентов ПИД-регулятора уточняются (точка 3) и повторяется процесс возбуждения синусоидальных колебаний системы. Оценка характеристик возбуждаемых колебаний осуществляется по двум установившимся периодам. Установившимися считаются колебания, амплитуды которых отличаются не более чем на 20 % от расчетной. Если характеристики практически возбуждаемых колебаний будут соответствовать расчетным, автонастройка заканчивается (точка 4).
7.1.3.3. В процессе точной автонастройки регулятор возбуждает колебания входной величины вокруг уставки с амплитудой, значение которой установлено пользователем в параметре dYx группа SELF. Значение этого параметра должно отвечать условию: dYx = AnP. Параметр AnP (группа LuoP) определяется в процессе предварительной настройки. В группе параметров автонастройки SELF имеется также параметр ALFA, определяющий отношение постоянной времени дифференцирования tд к постоянной времени интегрирования tи (tд / tи). Чем меньше значение этого параметра, тем меньше будет вычисленное при автонастроке значение параметра tд. Следовательно влияние дифференциальной составляющей ПИД-регулятора на процесс регулирования будет уменьшено. Значение параметра ALFA задается в относительных единицах в диапазоне от 0,1 до 0,25. Заводской установкой этого параметра явлется значение 0,125, что во многих случаях является удовлетворительным. Оперировать параметром ALFA не рекомендуется пользователям, не имеющих большого опыта работы с системами ПИД — регулирования.
Доступ к параметрам автонастройки (группа SELF) осуществляется только через код PASS = 17.
После окончания точной настройки светодиод «ТН» прекращает светиться. Вычисленные значения параметров ПИД-регулятора автоматически записываются в память прибора. При сбое в процессе автонастройки ее выполнение сразу прекращается, соответствующий светодиод гаснет. Поэтому при выполнении автонастройки особое внимание надо уделить защите прибора от различных внешних воздействий и электромагнитных помех и устранить нежелательные внешние возмущения на объекте регулирования.
В некоторых случаях точную настройку методом ГСК в данной системе регулирования провести невозможно, тогда на индикаторе высвечивается сообщение об ошибке автонастройки Er.75. Причинами невозможности проведения точной автонастройки являются:
— слишком малая амплитуда возбуждаемых колебаний, установленная в параметре dYx;
— слишком высокий уровень внешних помех, приводящих к нестабильности периода возбуждаемых колебаний.
7.2. Ручная настройка
7.2.1. Если характеристика объекта регулирования заранее известны, пользователь вручную может установить параметры ПИД-регулирования:
Р — полосу пропорциональности регулятора Xр;
i — постоянную времени интегрирования ti;
d — постоянную времени дифференцирования td.
7.2.2. Значения параметра Р устанавливаются в единицах измерения входной величины; диапазон — от 0 до 9999. При значении параметра Р = 0 регулятор работает как двухпозиционный компаратор.
Значения параметра i устанавливаются в секундах; диапазон — от 0 до 3999 с. При i = 0 прибор работает как ПД-регулятор.
Значения параметра d устанавливаются в секундах; диапазон — от 0 до 3999 с. При d = 0 прибор работает как ПИ-регулятор.
При i = 0 и d = 0 прибор работает как П-регулятор.
8. Эксплуатация
8.1. Общие сведения
8.1.1. При включении питания прибор начинает измерять контролируемую величину. Измеренная величина отображается на верхнем индикаторе.
8.1.2. При нажатии кнопки [ПРОГ] на нижнем индикаторе появляется значение уставки SР, которое можно оперативно изменить кнопками «∧» и «∨», если не установлена защита от изменений или доступа (см. подразд. 6.2.8, стр. 34).
8.2. Настройка запуска / остановки процесса регулирования
Запуск и остановка процесса регулирования могут быть осуществлены тремя способами:
а) изменением значения параметра r-S:
— rUn — регулятор работает;
— StoР — регулятор остановлен,
б) изменением состояния ключа 1 на дополнительном входе, если задействована соответствующая функция дополнительного входа (см. п. 3.2.3, стр. 13):
— ключ замкнут — регулирование остановлено;
— ключ разомкнут — регулирование запущено;
в) соответствующей командой от управляющего устройства в сети RS-485.
9. Техническое обслуживание
9.1. Обслуживание прибора в период эксплуатации состоит из периодического технического осмотра, а также поверки его метрологических характеристик.
9.2. Технический осмотр прибора должен проводиться обслуживающим персоналом не реже одного раза в 3 месяца и включать в себя выполнение следующих операций:
— очистку корпуса прибора, а также его клеммников от пыли, грязи и посторонних предметов;
— проверку качества крепления прибора к щиту управления;
— проверку надежности подключения внешних связей к клеммникам.
Обнаруженные при осмотре недостатки следует немедленно устранять.
9.3. Поверка метрологических характеристик приборов должна проводиться не реже одного раза в 2 года по методике КУВФ.421214.001 МП. При необходимости проводится юстировка входных устройств ТРМ101 (прил. Е, стр. 53 — 57).
9.4. При выполнении работ по техническому обслуживанию прибора необходимо соблюдать меры безопасности, изложенные в разд. 4, стр. 23.
10. Маркировка и упаковка
10.1. При изготовлении на ТРМ101 наносится следующая информация:
— наименование прибора и вариант его модификации;
— товарный знак предприятия-изготовителя;
— заводской номер;
— год изготовления;
— изображение знака соответствия требованиям нормативных документов;
— напряжение питания прибора и потребляемая им мощность.
10.2. Упаковка прибора производится в потребительскую тару, выполненную из гофрированного картона.
11. Транспортирование и хранение
11.1. Прибор должен транспортироваться в упаковке при температуре от минус 25 °С до +55 °С и относительной влажности воздуха не более 95 % (при температуре +35 °С).
11.2. Транспортирование допускается всеми видами закрытого транспорта.
11.3. Транспортирование на самолетах должно производиться в отапливаемых герметичных отсеках.
11.4. Прибор должен храниться в упаковке в закрытых складских помещениях при условиях 1 по ГОСТ 15150-69.
Воздух помещения не должен содержать агрессивных к корпусу прибора паров и газов.
12. Комплектность
Прибор ТРМ101 — 1 шт.
Комплект крепежных элементов — 1 шт.
Паспорт — 1 шт.
Руководство по эксплуатации — 1 шт.
13. Гарантийные обязательства
14.1. Изготовитель гарантирует соответствие прибора ТУ при соблюдении условий эксплуатации, транспортирования, хранения и монтажа.
14.2. Гарантийный срок эксплуатации со дня продажи — 24 месяца.
14.3. Для отправки в ремонт необходимо:
— заполнить Ремонтную карту в Гарантийном талоне;
— вложить в коробку с прибором заполненный Гарантийный талон;
— отправить коробку по почте или привезти по адресу:
109456, г. Москва, 1-й Вешняковский пр., д. 2
тел.: 174-82-82, e-mail: support@owen.ru.
ВНИМАНИЕ! 1. Гарантийный талон не действителен без штампа даты продажи и штампа ОТК.
2. Крепежные элементы вкладывать в коробку не нужно.
Описание и работа ТРМ101
Настоящее руководство по эксплуатации предназначено для ознакомления обслуживающего персонала с устройством, принципом действия, конструкцией, порядком эксплуатации и обслуживания измерителей-регуляторов типа ТРМ101. Приборы ТРМ101 могут выпускаться в различных модификациях, отличающихся друг от друга типом встроенных выходных устройств.
Модификации прибора соответствует следующее условное обозначение:
![]()
Типы выходных устройств:
РР — 2 реле электромагнитных с коммутационной способностью 1 (8) А (при напряжении не более 220 В 50 Гц и cos (φ > 0,4);
КР — первое выходное устройство (ВУ1) — оптопара транзисторная п-р-п-типа с коммутационной способностью 0,2 А (при напряжении не более 40 В);
второе выходное устройство (ВУ2) — электромагнитное реле;
СР — ВУ1 — оптопара симисторная с коммутационной способностью 50 мА (при напряжении до 250 В);
ВУ2 — электромагнитное реле;
ИР — ВУ1 — ЦАП «параметр-ток 4. 20 мА»;
ВУ2 — электромагнитное реле;
РИ — ВУ1 — электромагнитное реле;
ВУ2 — ЦАП «параметр — ток 4. 20 мА»;
КИ — ВУ1-транзисторная оптопара;
ВУ2 — ЦАП «параметр — ток 4. 20 мА»;
СИ — ВУ1 — симисторная оптопара;
ВУ2 — ЦАП «параметр — ток 4. 20 мА»;
ИИ — 2 цифроаналоговых преобразователя «параметр-ток 4. 20 мА»;
СС — 2 симисторных оптопары;
КК — 2 транзисторных оптопары.
Пример записи условного обозначения прибора при заказе и в документации другой продукции, где они могут быть применены:
Прибор ТРМ101 — РР ТУ 4211 — 003 — 46526536 — 03
Это означает, что изготовлению и поставке подлежит измеритель-регулятор ТРМ 101, оснащенный в качестве выходных устройств электромагнитными реле.
Сертификат соответствия № 03.009.0106.
1. Назначение
Приборы ТРМ101 в комплекте с первичным преобразователем предназначены для измерения физического параметра контролируемого объекта, отображения измеренного параметра на встроенном цифровом индикаторе; а также для формирования сигналов управления встроенными выходными устройствами, которые осуществляют регулирование измеряемого параметра.
Приборы ТРМ101 могут быть использованы в системах контроля и регулирования при выполнении технологических процессов в разных отраслях промышленности и сельском хозяйстве.
Прибор может выполнять следующие функции.
1. Измерение температуры или другой физической величины.
2. Регулирование измеряемой величины по ПИД-закону путем импульсного или аналогового управления.
3. Автонастройка регулятора на установленном объекте.
4. Определение аварийной ситуации при выходе измеряемого параметра за заданные границы и при обрыве в контуре регулирования.
5. Обнаружение ошибок работы и определение причины неисправности.
6. Работа в сети, организованной по стандарту RS-485, что позволяет задавать необходимые режимы работы прибора и осуществлять контроль.
7. Дистанционное управление запуском и остановкой регулирования.
2. Технические характеристики и условия эксплуатации
2.1. Основные технические характеристики приведены в табл. 1 — 7.
Таблица 1 Питание
| Наименование | Значение |
| Напряжение питания, В | 90. 245 |
| Потребляемая мощность, ВА | 6 |
| Частота, Гц | 43. 63 |
Таблица 2 Датчики и входные сигналы
| Тип датчика или входной сигнал | Диапазон измерения | Разрешающая способность |
| Термопара | ||
| ТХК (L) | -200. +800 °С | 0,1 °С |
| ТХА (К) | -200. + 1300 °С | |
| ТНН(N) | -200. + 1300 °С | |
| ТЖК (J) | -200. + 1200 °С | |
| ТМК (Т) | -200. +400 °С | |
| ТВР (А-1) | 0. +2500 °С | |
| ТВР (А-2) | 0. + 1800 °С | |
| ТВР (А-3) | 0. + 1800 °С | |
| ТПП (R) | 0. + 1750 °С | |
| ТПП (S) | 0. + 1750 °С | |
| ТПР (В) | +200. + 1800 °С | |
| Термопреобразователь сопротивления | ||
| ТСМ 50 W100 = 1,426 | -50. +200 °С | 0,1 °С |
| ТСМ 50 W100 = 1,428 | -190. +200 °С | |
| ТСП 50 W100 = 1,385 | -200. +750 °С | |
| ТСП 50 W100 = 1,391 | -200. +750 °С | |
| TCM 100 W100 = 1,426 | -50. +200 °С | |
| ТСМ 100 W100 = 1,428 | -190. +200 °С | |
| ТСП 100 W100 = 1,391 | -200. +750 °С | |
| ТСП 100 W100 = 1,385 | -200. +750 °С | |
| ТСП гр.21 (R0 = 46 Ом, W100 = 1,391) | -200. +750 °С | |
| ТСМ гр. 23 (R0 = 53 Ом, W100 = 1,426) | -50. +200 °С | |
| Pt100 по стандарту DIN 43760 | ||
| ТСП 100 W100 = 1,385 | -200. +750 °С | |
| Унифицированный сигнал постоянного тока | ||
| 4. 20 мА | -5. 105% | 0,1 % |
| 0. 20 мА | -5. 105% | |
| 0. 5 мА | -5. 105% | |
| Унифицированный сигнал постоянного напряжения | ||
| 0. 1 В | -5. 105% | 0,1 % |
| -50. +50 мВ | -5. 105% | |
| Примечания. 1. W100 — отношение сопротивления датчика при 100 °С к его сопротивлению при 0 °С. 2. При температурах больших 1000 °С разрешающая способность равна 1 °С. |
||
Таблица 3 Входы
| Наименование | Значение |
| Основной вход | |
| Время опроса датчика Входное сопротивление прибора при подключении источника унифицированного сигнала: — тока (с подключенным внешним прецизионным резистором, см. п. 3.2.2.3.1) — напряжения, не менее Предел допустимой основной погрешности |
1 с 100 Ом ±0,1 % 100 кОм ±0,5% |
| Дополнительный вход | |
| Сопротивление ключей в состоянии: «замкнуто» «разомкнуто» |
0. 1 кОм 100 кОм. ¥ |
Таблица 4 Выходные устройства ключевого типа
| Тип ВУ | Ток нагрузки | Напряжение |
| Транзисторная оптопара | 200 мА | 50 В пост, тока |
| Симисторная оптопара: | ||
| — постоянно открытый симистор | 50 мА | 250 В |
| — симистор включается с частотойне более 50 Гц и tимп = 5 мс | 1 А | 300 В |
| Электромагнитное реле: | ||
| — ПИД — регулирование | 1 А | 220 В перем. тока, частотой 50. 60 Гц, cos φ 0,4; 30 В пост, тока |
| — двухпозиционное регулирование | 8 А | аналогично |
| Примечание. Электрическая прочность реле при максимальной нагрузке 10 6 переключений | ||
Таблица 5 Аналоговый выход
| Наименование | Значение |
| Диапазон тока | 4. 20 мА |
| Дискретность ЦАП | 10 разрядов |
| Сопротивление нагрузки, не более | 1000 Ом |
| Диапазон напряжения питания | 10. 30 В |
Таблица 6 Интерфейс связи
| Наименование | Значение |
| Тип интерфейса Скорость передачи данных, кбит/с Тип кабеля |
RS-485 2,4; 4,8; 9,6; 19,6; 38,4; 57,6; 115,2 Экранированная витая пара |
Таблица 7 Корпус
| Наименование | Значение |
| Габаритные размеры прибора без элементов крепления, мм | 48 x 48 x 102 |
| Масса, не более, кг Степень защиты корпуса со стороны передней панели |
0,5 IP54 |
2.2. Прибор соответствует группе климатического исполнения УХЛ4 по ГОСТ 15150-69 и предназначен для эксплуатации в следующих условиях:
температура окружающего воздуха +1. 50°С
относительная влажность при 35 °С 30. 85%
атмосферное давление 85. 107 кПа
3. Описание работы прибора
3.1. Состав изделия
3.1.1. Прибор ТРМ101 изготавливается в пластмассовом полупрозрачном корпусе (рис. 1).
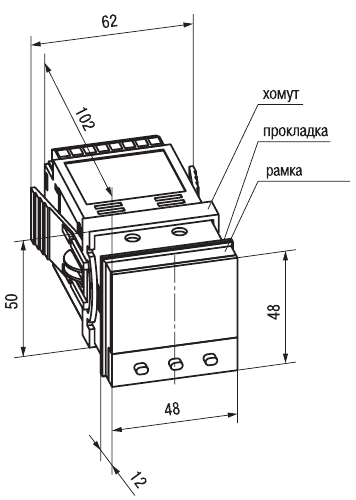
Рис. 1
Корпус имеет отверстия для вентиляции, отверстия для установки винтовых фиксаторов крепления в щит. Прибор рассчитан на установку в щите толщиной до 10 мм. В комплекте имеется специальный хомут для крепления в щите. Габаритные чертежи прибора для разных видов крепления приведены в прил. А.
В задней части корпуса находятся две клеммных колодки (клеммника):
— нижняя предназначена для подсоединения цепей питания и цепей управления исполнительными механизмами;
— верхняя — для подключения входного датчика, ключей к дополнительному входу и кабеля связи по интерфейсу RS-485.
3.1.2. На передней панели прибора (рис. 2) находятся индикаторы:
— верхний цифровой индикатор красного цвета предназначенный для отображения измеряемой величины или названия программируемого параметра;
— нижний цифровой индикатор зеленого цвета, предназначенный для отображения уставки или значения программируемого параметра;
— восемь светодиодов красного цвета, показывающие постоянным свечением состояние прибора:
«К1» — включение выходного устройства ВУ1;
«К2» — включение выходного устройства ВУ2;
«AL» — срабатывание компаратора при обнаружении выхода регулируемого параметра за заданные пределы;
«LBA» — обнаружение обрыва в контуре регулирования;
«П/С» — запуск процесса регулирования;
«ПН» — предварительная автонастройка;
«ТН» — точная настройка;
«RS» — управление от RS-485.
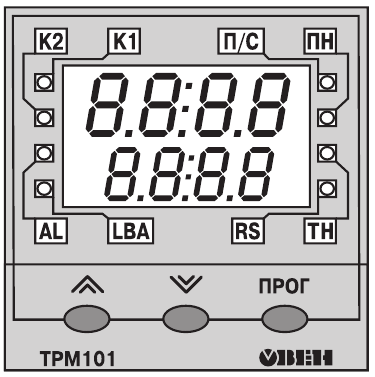
Рис. 2
Кнопки, находящиеся на передней панели прибора, имеют следующее назначение:
«∧» – для увеличения значения программируемого параметра;
«∨» – для уменьшения значения программируемого параметра;
[ПРОГ] — для входа в меню программирования или для перехода к следующему параметру.
При работе с прибором ТРМ 101 для входа в специальные режимы работы прибора используются комбинации кнопок:
– [ПРОГ] + «∧» + «∨» – для перехода к установке кодов доступа, на индикаторе получаем изображение:
PASS 0
– [ПРОГ] + «∨» – для сдвига отображаемого значения программируемого параметра, единицей измерения которого является температура, вправо;
– [ПРОГ] + «∧» – для сдвига отображаемого значения программируемого параметра, единицей измерения которого является температура, влево.
3.2. Устройство и принцип действия
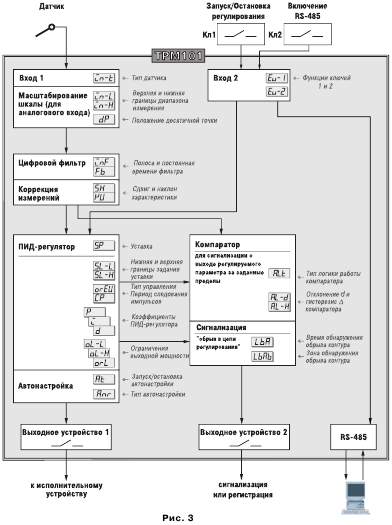
3.2.1. Структурная схема
Структурная схема прибора приведена на рис. 3.
ТРМ101 имеет универсальный измерительный вход 1 для подключения датчиков различных типов (см. табл. 2), дополнительный вход 2 для дистанционного управления, цифровой фильтр, ПИД-регулятор и устройства сигнализации, а также выходные устройства (ВУ) и интерфейс RS-485.
3.2.2. Измерительный вход
Порядок установки параметров измерительного входа описан в разд. 6.2.1, стр. 27-28
К измерительному входу 1 прибора для измерения параметра можно подключать любой из вышеперечисленных датчиков (см. табл. 2), поэтому он называется универсальным. Для измерения температур следует использовать термопреобразователи сопротивления и термоэлектрические преобразователи (термопары). Для измерения других физических параметров могут быть использованы датчики, оснащенные нормирующими преобразователями этих параметров в унифицированные сигналы постоянного тока 4. 20мА, 0. 20мА, 0. 5мА или напряжения — 50. 50мВ и 0. 1 В.
Схемы подключения приведены в прил. Б, стр. 43 — 44.
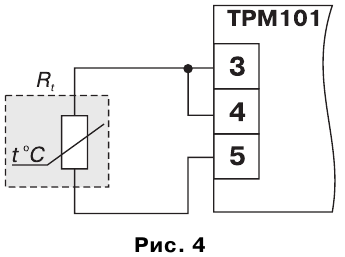
3.2.2.1. Подключение термопреобразователей сопротивления
Работа термопреобразователей сопротивления (ТС) основана натемпературной зависимости электрического сопротивления металлов. Датчик, как правило, выполнен в виде катушки из тонкой медной или платиновой проволоки на каркасе из изоляционного материала, заключенной в защитную гильзу. Термопреобразователи сопротивления Rt характеризуются двумя параметрами: R0 — сопротивление датчика при 0 °С и W100 — отношение сопротивления датчика при 100 °С к его сопротивлению при 0°С.
В приборах ТРМ 101 используется трехпроводная схема подключения термопреобразователей сопротивления. К одному из выводов Rt подсоединяются два провода, а третий подключается к другому выводу Rt (рис. 4). Такая схема при соблюдении условий равенства сопротивлений всех трех проводов позволяет скомпенсировать их влияние на измерение температуры.
Термопреобразователи сопротивления могут подключаться к прибору с использованием двухпроводной схемы подключения, но при этом отсутствует компенсация сопротивления соединительных проводов и поэтому будет наблюдаться некоторая зависимость показаний прибора от колебаний температуры проводов. В случае использования двухпроводной схемы необходимо при подготовке прибора к работе выполнить действия, указанные в прил. В, стр. 45.
3.2.2.2. Подключение термоэлектрических преобразователей
Термоэлектрический преобразователь (термопара) состоит из двух соединенных на одном из концов проводников, изготовленных из металлов, обладающих разными термоэлектрическими свойствами. Соединенные концы, называемые «рабочим спаем», — опускают в измеряемую среду, а свободные концы термопары («холодный спай») подключают ко входу ТРМ 101 (клеммы 4 и 5), рис. 5. Если температуры «рабочего» и «холодного спаев» различны, то термопара вырабатывает термо ЭДС, которая и подается на измеритель.
Поскольку термо ЭДС зависит от разности температур двух спаев термопары, то для получения корректных показаний необходимо знать температуру «холодного спая», чтобы скомпенсировать эту разницу в дальнейших вычислениях.
Для работы с термопарами в приборе предусмотрена автоматическая коррекция температуры свободных концов термопары. Датчик температуры «холодного спая» установлен рядом с присоединительным клеммником.
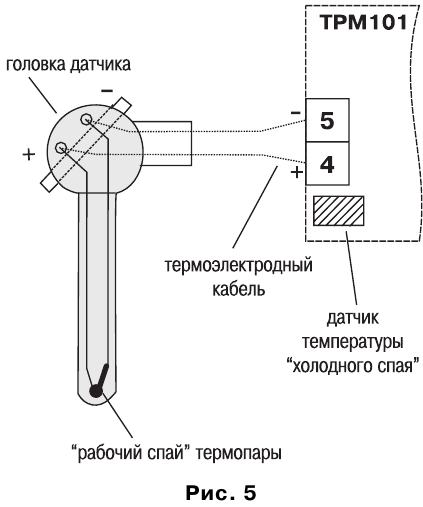
Подключение термопар к прибору должно производиться с помощью специальных компенсационных (термоэлектродных) проводов, изготовленных из тех же самых материалов, что и термопара. Допускается также использовать провода из металлов с термоэлектрическими характеристиками, которые в диапазоне температур 0. 100°С аналогичны характеристикам материалов электродов термопары. При соединении компенсационных проводов с термопарой и прибором необходимо соблюдать полярность. При нарушении указанных условий могут иметь место значительные погрешности при измерении.
3.2.2.3. Работа с унифицированными сигналами тока или напряжения
3.2.2.3.1. Многие первичные преобразователи различных физических величин (тензодатчики, термопары, датчики влажности и т.п.) оснащены нормирующими преобразователями этих величин в унифицированные значения постоянного тока 0. 5 мА, 0. 20мА, 4. 20 мА. Выходной ток нормирующего преобразователя, как правило, линейно пропорционален значению измеряемой величины.
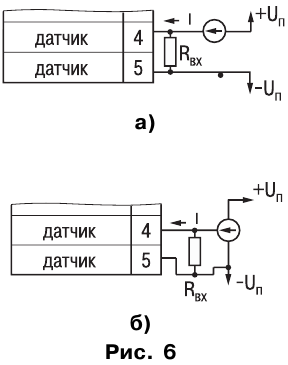
При подключении этих датчиков к ТРМ101 необходимо использовать внешний нагрузочный резистор, через который будет протекать ток нормирующего преобразователя, и падение напряжения на котором будет измерять прибор. Резистор должен быть прецизионным (типа С2-29В, С5-25 и т.п., мощностью не менее 0,25 Вт, сопротивлением 100 Ом ±0,1 %) и высокостабильным во времени и по температуре (ТКС не хуже 25*10 –6 1/°С)). Для питания нормирующих преобразователей необходим дополнительный источник постоянного напряжения. На рис. 6, а приведена двухпроводная схема подключения для датчиков с унифицированным выходным сигналом тока 4. 20 мА, а на рис. 6,6- трехпроводная схема подключения для датчиков с сигналом тока 0. 5 (20) мА. Значение этого напряжения Un указывается в технических характеристиках нормирующего преобразователя и, как правило, лежит в диапазоне 18. 36 В.
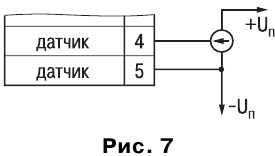
3.2.2.3.2. При работе в качестве измерителя постоянного напряжения прибор ТРМ101 может использоваться как вольтметр с диапазоном 0…1 В или как милливольтметр –50…+50 мВ (рис. 7).
3.2.2.3.3. При измерении аналоговых сигналов в приборе осуществляется линейное преобразование входной величины в реальное значение физической величины в соответствии с заданным диапазоном измерения (см. п. 6.2.1.2, стр. 28).
3.2.3. Дополнительный вход
Порядок установки параметров дополнительного входа описан в разд. 6.2.6, стр. 33
К дополнительному входу подсоединяют ключи, позволяющие изменять режимы работы прибора. Ключ Кл1 осуществляет запуск и остановку процесса регулирования (см. рис. 3). При размыкании или отсоединении от прибора ключа Кл1 прибор прекращает процесс регулирования и светодиод «П/С» гаснет. При замыкании этого ключа запускается процесс регулирования и засвечивается светодиод «П/С».
Ключ Кл2 (см. рис. 3) включает дистанционное управление прибором через интерфейс RS-485. При замыкании ключа Кл2 программируемые параметры в прибор могут записываться только от компьютера или другого контроллера, одновременно засвечивается светодиод «RS». При размыкании ключа прибором можно управлять автономно, т.е. непосредственно кнопками, расположенными на лицевой панели прибора. Команды от дополнительного входа имеют приоритет над управлением кнопками. Например, запуск процесса регулирования путем установки параметра r-S в значение rUn не может быть осуществлен, если ключ замкнут (табл. Г.1, стр. 46).
Логическое состояние ключа соответствует его электрическому сопротивлению:
— «замкнуто» — 0. 1 кОм;
— «разомкнуто» — 100 кОм. ¥.
При несоблюдении этих условий возникает неопределенность состояния дополнительного входа.
3.2.4. Цифровой фильтр
Порядок установки параметров цифрового фильтра описан в разд. 6.2.2, стр. 28-29
3.2.4.1. Для корректной работы прибор необходимо защищать от различных внешних воздействий и электромагнитных помех. Для этой цели рекомендуется использовать помехоподавляющий фильтр в цепи питания ТРМ101, а в цепи управления параллельно выходным коммутирующим контактам установить искрогасящие элементы, например RC- цепочку. Кроме аппаратной защиты существует возможность использовать программный цифровой фильтр низких частот.
3.2.4.2. Цифровой фильтр осуществляет подвление помех в две ступени. На первой ступени фильтр устраняет сильные единичные помехи (рис. 8). Прибор сравнивает скорость изменения температуры vф = ΔTi / Δti с заданным значением «полосы фильтра» Fв, и если nф превышает Fв, последнее измерение Ti игнорируется и заменяется предыдущим Ti-1 (рис. 8).
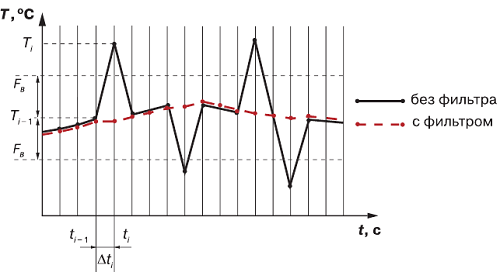
Рис. 8
3.2.4.3. На второй ступени фильтр устраняет шумовые составляющие сигнала, осуществляя его экспоненциальное сглаживание.
Основной характеристикой экспоненциального фильтра является постоянная времени tф — интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения т. (рис. 9).
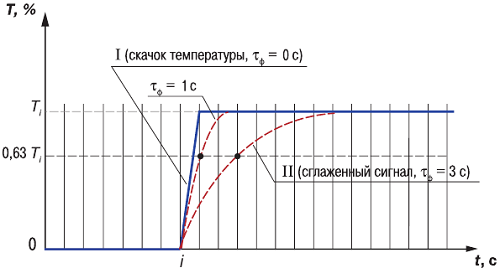
Рис. 9
3.2.4.4. При больших значениях tф фильтр вносит значительное запаздывание, но шумы заметно подавлены (кривая II на рис. 9). tф близких к нулю фильтр довольно точно отслеживает изменения входного сигнала, но уровень шума практически не уменьшается (кривая I на рис. 9). При установке оптимальных значений параметров фильтра (подробнее см. раздел 6.2.2) задержка сигнала, вносимая фильтром, не будет оказывать отрицательного влияния на процесс регулирования, при этом сохраняется эффективность подавления помех.
3.2.5. Коррекция измерений
Порядок установки параметров коррекции измерительной характеристики приведен в разд. 6.2.1.3, стр. 28
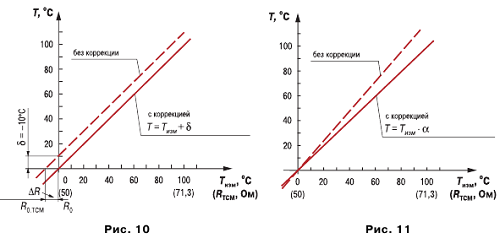
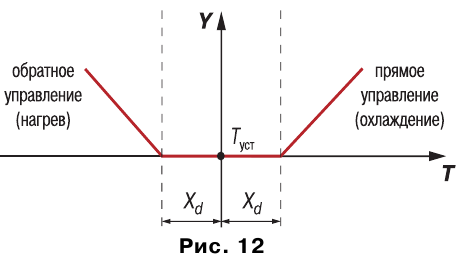
3.2.5.1. Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренное прибором значение может быть откорректировано. В ТРМ101 есть два типа коррекции, позволяющих осуществлять сдвиг или наклон характеристики на заданную величину.
3.2.5.2. Для компенсации погрешностей DR = R0 — RO.TCM, вносимых сопротивлением подводящих проводов RTCM при использовании двухпроводной схемы подключения термопреобразователей сопротивления к каждому измеренному значению параметра Teci прибавляется заданное пользователем значение d («сдвиг характеристики»). На рис. 10 приведен пример сдвига характеристики для датчика ТСМ50М, W100= 1,426.
3.2.5.3. Для компенсации погрешностей датчиков при отклонении значения W100 от номинального каждое измеренное значение параметра Teci умножается на заданный пользователем поправочный коэффициент a («наклон характеристики»). Коэффициент задается в пределах от 0,8 до 2,0. На рис. 11 приведен пример изменения наклона характеристики для датчика ТСМ 50М W100= 1,426.
3.2.6. ПИД-регулятор
Порядокустановки параметров процесса регулирования приведен в разд. 6.2.3, стр. 29.
3.2.6.1. Общие принципы ПИД-регулирования
На выходе регулятора вырабатывается управляющий (выходной) сигнал Yi, действие которого направлено на уменьшение отклонения Еi:

где Xp — полоса пропорциональности;
Ei – разность между заданными Tуст и текущими Ti значением измеряемой величины, или рассогласование;
tд – постоянная времени дифференцирования;
DEi – разность между двумя соседними измерениями Ei и Ei–1;
Dtизм – время между двумя соседними измерениями Ti и Ti–1;
tи – постоянная времени интегрирования;
∑ Ei∆tизм – накопленная сумма рассогласований.
Из формулы (1) видно, что при ПИД-регулировании сигнал управления зависит от:
1) разницы между текущим параметром Ti заданным значением Туст измеряемой величины Еi, которая реагирует на мгновенную ошибку регулирования; отношение Еi / Xp называется пропорциональной составляющей выходного сигнала;
2) скорости изменения параметра ∆Ei / tизм, которая позволяет улучшить качество переходного процесса;
выражение (1 / Xp τ∆) * (∆Ei / tизм) называется дифференциальной составляющей выходного сигнала.
3) накопленной ошибки регулирования ∑ Ei∆tизм , которая позволяет добиться максимально быстрого достижения температуры уставки;
выражение (1 / Xp) * (1 / tи)) * ∑ Ei∆tизм называется интегральной составляющей выходного сигнала;
Для эффективной работы ПИД-регулятора необходимо установить правильные для конкретного объекта регулирования значения коэффициентов a, tд и tи, которые пользователь может определить либо в режиме АВТОНАСТРОЙКА (см. разд. 7.1, стр. 35 – 37), либо ручной настройкой (разд. 7.2, стр. 37).
3.2.6.2. Прямое и обратное управление
При регулировании выбирают один из методов управления системой: прямое или обратное.
При прямом управлении значение выходного сигнала регулятора увеличивается с увеличением измеряемой величины (рис.12). При обратном управлении значение выходного сигнала регулятора уменьшается с увеличением измеряемой величины. Например, в системе нагревания по мере роста температуры значение выходного сигнала уменьшается. Этот процесс имеет обратное управление, системы охлаждения — прямое управление.
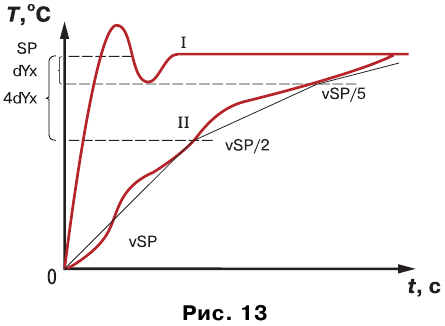
3.2.6.3. Зона нечувствительности
Для исключения излишних срабатываний регулятора при небольшом значении рассогласования Еi для вычисления Yi по формуле (1) используется уточненное значение Еp, вычисленное в соответствии с условиями:
если |Ei| < Xd, то Ep = 0
если Ei > Xd, то Ep = Ei – Xd;
если Ei < – Xd, то Ep = Ei + Xd,
где Xd – зона нечувствительности (см. рис. 12).
Тогда прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.
3.2.6.4. Ограничение скорости выхода на уставку
Ограничение скорости выхода контролируемой величины на заданное значение используется для предотвращения перерегулирования при запуске системы (кривая I на рис. 13). Фиксированное значение уставки заменяют на «плавающее», которое постепенно приближают к значению, установленному в параметре SP прибора (кривая II). Приближение происходит по графику (см. рис. 13) со скоростью, задаваемой в параметре uSР, размерность °С/мин.
Рекомендуемое значение uSР определяется при предварительной автонастройке и обеспечивает первоначальную величину перерегулирования (первого выбега) не более dYx.
При использовании скорости выхода на уставку возрастает время выхода на рабочий режим. Поэтому если задержка приводит к неудовлетворительным результатам, нужно увеличить uSР. При uSР = 0 ограничение скорости выхода на уставку отсутствует.
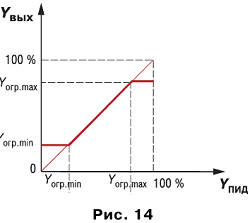
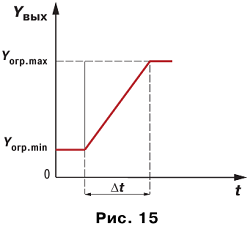
3.2.6.5. Ограничения выходного сигнала
ТРМ101 можно установить следующие ограничения выходного сигнала:
– максимального Yогр.max и минимального Yогр.min значений (рис. 14).
– скорости изменения vогр = (Yогр.max — Yогр.min) / ∆t (рис. 15), используемые для ограничения управляющего воздействия на объект.
3.2.6.6. Период следования управляющих импульсов
Для выходных устройств ключевого типа необходимо установить верное значение периода управляющих импульсов. Более высокая частота обеспечивает быстроту реакции регулятора на внешние возмущения. В идеале частота импульсов управления должна совпадать с частотой опроса датчика. При использовании электронных ключей (тиристоров, симисторов) устанавливать значение Тсл равным 1. 2 с.
Увеличение периода следования управляющих импульсов позволяет при использовании электромагнитных реле или пускателя удлинить срок службы силовых контактов, но может ухудшить качество регулирования. В этом случае Тсл не должно превышать 1. 2% (см. также п. 6.2.4.4).
Автонастройка позволяет определять значение Тсл, которое не будет оказывать отрицательного влияния на работу системы.
3.2.7. Устройства аварийной сигнализации
Порядок установки параметров устройств аварийной сигнализации описан в разд. 6.2.5, стр. 32-33
3.2.7.1. Общие сведения
Для более эффективного контроля за процессами регулирования в приборе имеется логическое устройство, работающее по принципу компаратора, а также устройство определения обрыва контура «LBA».
Оба устройства управляют различными сигнализирующими устройствами, например: сиренами, лампами, блокировочными выключателями, блоками принудительного (аварийного) охлаждения или нагревания и т.п.
Сигналы аварийной сигнализации коммутируются либо через логическую схему «И», либо через схему «ИЛИ» и могут управлять только выходным устройством ключевого типа.
О срабатывании логического устройства свидетельствует засветка соответствующего светодиода на передней панели («AL» или «LBA»).
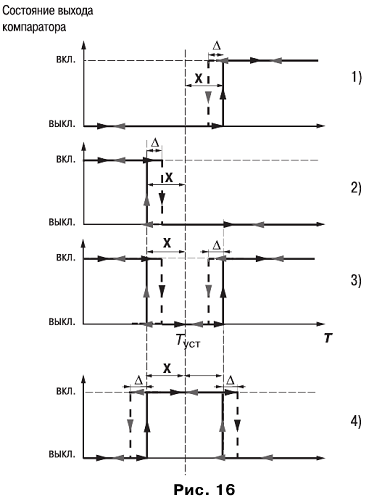
3.2.7.2. Компаратор
В зависимости от системы регулирования пользователь может задать параметры срабатывания компаратора, сигнализирующегоо выходе регулируемой величины за допустимые пределы. В приборе заложено 7 типов логики срабатывания компаратора (см. ниже). Кроме того, пользователь задает порог срабатывания компаратора X и зону возврата D (гистерезис) для устранения ненужных срабатываний из-за колебаний конролируемой величины вокруг порогового значения.
Компаратор сигнализирует об аварийной ситуации (при этом регулятор продолжает работать), если измеренное значение:
1) превышает уставку регулятора на X;
2) меньше уставки регулятора на X;
3) выходит за заданный диапазон;
4) находится в заданном диапазоне;
5) аналог, п. 1, только с блокировкой 1-го срабатывания;
6) аналог, п. 2, только с блокировкой 1-го срабатывания;
7) аналог, п. 3, только с блокировкой 1-го срабатывания.
Диаграммы срабатывания сигнализации для приведенных выше типов логики 1 — 4 представлены на рис. 16. Диаграммы типов 5 — 7 совпадают с диаграммами типов 1, 2,3.
Функция блокировки первого срабатывания позволяет исключить включение сигнализации при:
— подаче питания;
— изменении значения уставки;
— изменении порога срабатывания компаратора;
Использование этой функции имеет смысл, например, при установке в системе нагревания, поскольку, как правило, значение измеряемой величины в этой системе изначально находится ниже уставки.
Рассмотрим пример сигнализации с типом логики 7(рис. 17). На рис. 17 показана работа компаратора без блокировки первого срабатывания, тип логики 3 (рис. 17, б) и с блокировкой, тип логики 7 (рис. 17, в).
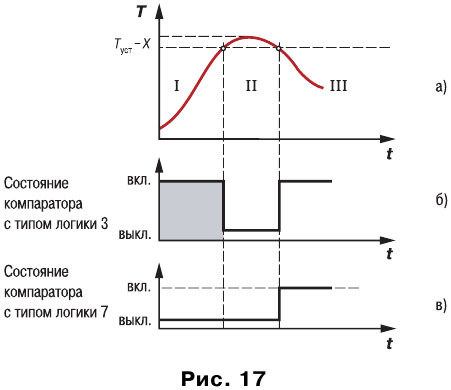
При использовании типа логики 3 происходит нежелательное срабатывание компаратора (заштрихованная площадь на рис. 17, б) на стадии I, когда реально аварийной ситуации нет. При использовании типа логики 7 нежелательного срабатывания не происходит.
После включения прибора выход компаратора будет находиться в состоянии «выкл» до первого превышения установленного значения (I стадия), и только когда измеряемая величина снова опустится ниже предела отклонения (точка А), выход компаратора впервые перейдет в состояние «включено» — сигнализация сработает.
3.2.7.3. Сигнализация об обрыве в контуре регулирования
3.2.7.3.1. Действие сигнализации основано на том, что значение регулируемого параметра не меняется в течение определенного времени при подаче максимального (минимального) управляющего воздействия, то в контуре регулирования произошел обрыв, и тогда на соответствующий выход выдается сигнал. Работа сигнализации об обрыве контура определяется двумя параметрами: «время определения обрыва контура» и «зона определения обрыва контура».
3.2.7.3.2. Устройство выдает сигнал тревоги, если по истечении времени определения обрыва контура измеренное значение не изменилось соответствующим образом:
— для процесса нагрева при максимальном выходном сигнале не увеличилось, при минимальном не уменьшилось;
— для процесса охлаждения при максимальном выходном сигнале не уменьшилось, при минимальном не уменьшилось.
При этом регулятор отключается.
3.2.7.3.3. Приведем пример срабатывания устройства определения обрыва контура (рис. 18).
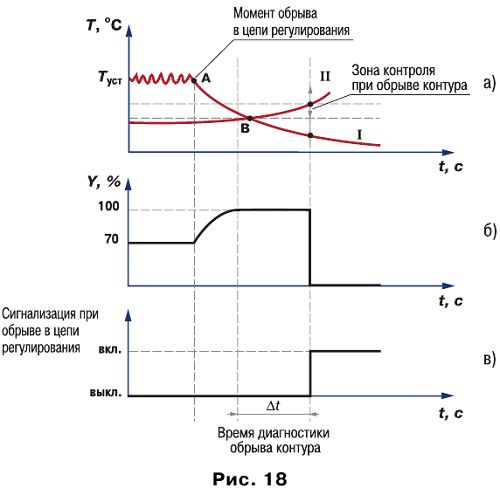
В точке А нагреватель вышел из строя, и температура начинает уменьшаться (рис.18, а). Регулятор увеличивает выходной сигнал (рис. 18,б), контролируя отклик системы. Поскольку температура продолжает уменьшаться, рассогласование растет, и значение У достигает 100%. В момент достижения Y = 100% (точка В) прибор начинает отсчет «времени определения обрыва контура» Dt.
Если по истечении этого времени температура продолжает уменьшаться, сигнализация срабатывает (кривая I на рис. 18, а). Если температура стала расти, но за время Dt изменение температуры не превысило «зону контроля при обрыве контура» (кривая II на рис. 18, а) сигнализация также срабатывает (рис. 18,в).
О появлении аварийной ситуации сигнализирует засветка светодиода «LBA».
3.2.8. Выходные устройства прибора
Выходные устройства (ВУ) ключевого типа (электромагнитное реле, транзисторная или симисторная оптопара) используются либо для импульсного управления исполнительным механизмом при ПИД-регулировании, либо для управления сигнализирующим устройством. Импульсное управление осуществляется по принципу ШИМ с периодом следования импульсов Тсл и длительностью каждого импульса
ВУ ключевого типа используются для управления (включения/выключения) нагрузкой либо непосредственно, либо через более мощные управляющие элементы, такие как пускатели, твердотельные реле, тиристоры или симисторы. Симисторную оптопару (оптосимистор), как правило, непосредственно не подключают.
Транзисторная оптопара и оптосимистор имеют гальваническую развязку от схемы прибора.
Транзисторная оптопара применяется, как правило, для управления низковольтным реле (до 50 В). Схема включения приведена на рис. 19. Во избежание выхода из строя транзистора иззза большого тока самоиндукции параллельно обмотке реле Р1 необходимо устанавливать диод VD1, рассчитанный на напряжение 100 В и ток 1 А.
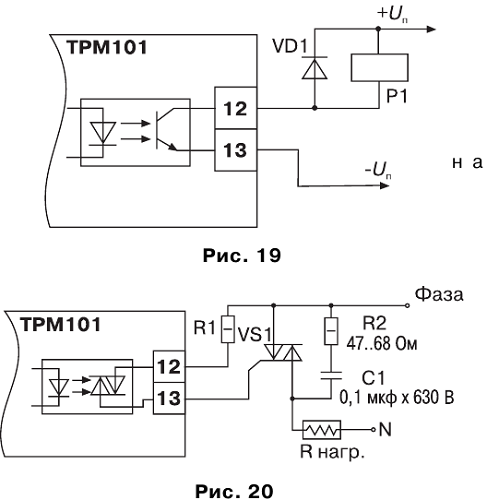
Оптосимистор включается в цепь управления мощного симистора через ограничивающий резистор R1 по схеме, показанной на рис. 20. Значение сопротивления резистора определяет величину тока управления симистора. Оптосимистор может также управлять парой встречноопараллельно включенных тиристоров VS1 и VS2 (рис. 21). Для предотвращения пробоя тиристоров из за высоковольтных скачков напряжения в сети к их выводам рекомендуется подключать фильтрующую RC-цепочку (R2C1).
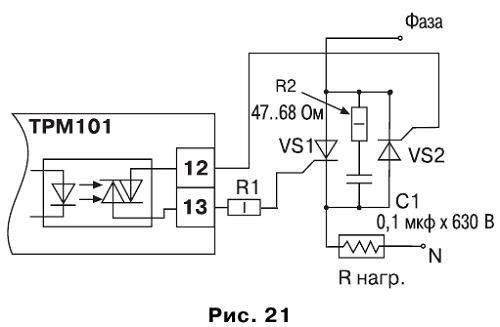
Оптосимистор имеет встроенное устройство перехода через ноль и поэтому обеспечивает полное открытие подключаемых тиристоров без применения дополнительных устройств.
3.2.8.2. Выходное устройство аналогового типа
3.2.8.2.1. ВУ такого типа используется либо для осуществления аналогового управления при ПИД-регулировании, либо для выдачи сигналов на устройство, регистрирующее контролируемую величину в течение процесса регулирования.
3.2.8.2.2. При работе в режиме регистратора прибор сравнивает величину на входе с заданными значениями и выдает на соответствующее ВУ аналоговый сигнал в виде тока 4. 20 мА, который можно подавать на самописец или другое регистрирующее устройство (подробнее см. п. 6.2.4.2).
К регистрирующим устройствам относятся: самописцы, блоки сбора данных на основе персональных или промышленных компьютеров, другие контроллеры с возможностью записи или дальнейшей передачи информации.
3.2.8.2.3. При аналоговом управлении выходной ток ЦАП Ii пропорционален значению выходного сигнала регулятора:
Ii = 16 Yi + 4, мА.
ВУ аналогового типа в приборе ТРМ101 – это цифроаналоговый преобразователь, который формирует токовую петлю 4…20 мА на активной нагрузке 0…1000 Ом (рис. 22) и, как правило, используется для управления электронными регуляторами мощности. Аналоговый выход гальванически изолирован от схемы прибора.

3.2.8.3. Подключение нагрузки к аналоговому выходу
Для работы аналогового выхода используется внешний источник питания постоянного тока, номинальное значение напряжения Uп которого рассчитывается следующим образом:
Uп.min < Uп < Uп.max;
Uп.min = 7,5 В + 0,02 А * Rн;
Uп.max = Uп.min + 2,5 В,
где Uп.min, Uп.max – минимально и максимально допустимое напряжения источника питания,соответственно, В;
Rн – сопротивление нагрузки ЦАП, Ом.
Если по какоййлибо причине напряжение источника питания ЦАП, находящегося в распоряжении пользователя, превышает расчетное значение Uп.max, то последовательно с нагрузкой необходимо включить ограничительный резистор (см. рис. 22), сопротивление которого Rогр рассчитывается по формулам:
Rогр < R < Rогр.max,
Rогр.min = (Uп — Uп.max) / Iцап.max
Rогр.max = (Uп — Uп.min) / Iцап.max
где Rогр.ном – номинальное значение сопротивления ограничительного резистора,кОм;
Rогр.min, Rогр.max – минимально и максимально допустимое значения сопротивления ограничительногорезистора,кОм;
Iцап.max – максимальный выходной ток ЦАП, мА.
ВНИМАНИЕ! Напряжение источника питания ЦАП Uп не должно быть более 30 В.
3.2.9. Интерфейс связи RSS485
Интерфейс связи предназначен для включения прибора ТРМ101 в сеть, организованную по стандарту RSS485. Использование прибора в сети RSS485 позволяет осуществлять следующие функции:
1. Сбор данных об измеряемых величинах и протекании процессов регулирования в системе SCADA.
2. Установка параметров прибора с помощью программыыконфигуратора.
3. Дистанционное управление процессом регулирования и автонастройки с помощью программыыконфигуратора, работающей в среде Windows
RS-485 является широко распространенным в промышленности стандартом интерфейса, обеспечивает создание сетей с количеством узлов (точек) до 256 и передачу данных на расстояние до 1200 м. При использовании повторителей количество подключенных узлов и расстояние передачи может быть увеличено. Для соединения приборов применяется экранированная витая пара проводов, к которым предъявляются следующие требования: сечение не менее 0,2 мм2 и погонная емкость не более 60 пф/м.
Все приборы в сети соединяются в последовательную шину (рис. 23). Для качественной работы приемопередатчиков и предотвращения влияния помех линия связи должна иметь на концах согласующие резисторы Rсогл = 120 Ом, подключаемый непосредственно к клеммам прибора (см. рис. 23).
Автоматическая настройка регулятора ТРМ101
Одной из важных задач при создании и эксплуатации систем управления технологическим процессами является обеспечение качественной работы автоматических систем регулирования (АСР), которая во многом зависит от настройки регуляторов.
Для систем управления технологическими процессами характерна недостаточность информации о динамических свойствах объекта и возмущающих воздействиях. Кроме того, динамические характеристики как объекта, так и элементов системы управления со временем изменяются. Применяемые на практике средства автоматизации могут существенно отличаться от идеальных. В особенности это относится к исполнительным механизмам и регулирующим органам. Поэтому по исходным данным о системе практически невозможно окончательно настроить регулятор.
Персонал, обслуживающий технологическое оборудование, обычно не обладает достаточными знаниями для выполнения качественной настройки систем регулирования. В связи с этим в современных микропроцессорных контроллерах предусматриваются алгоритмы автоматизации этой сложной и трудоемкой операции.
В настоящей статье рассказывается о принципе действия и особенностях автонастройки ПИД-регулятора ТРМ101, разработанной совместно со специалистами отдела новых разработок ОВЕН.
Этапы автонастройки регулятора
Как уже говорилось, автоматическая настройка ТРМ101 на объекте осуществляется в два этапа:
– предварительная, или первичная настройка регулятора;
– точная (основная) настройка регулятора, или его подстройка в процессе эксплуатации системы на объекте.
Задача предварительной настройки регулятора (ПНР) – определение за короткое время приблизительных значений основных параметров регулятора при отсутствии точной информации о характеристиках объекта. Это бывает необходимо, в частности, при первом включении регулятора. Значения параметров, полученные в результате ПНР, используются в последующем процессе точной настройки системы.
Рис. 2. Предварительная настройка регулятора: а – регулируемая величина; б – выходной сигнал регулятора
Особенность ПНР – большой диапазон активного регулирующего воздействия на объект, вызывающий значительные колебания регулируемой величины. В тех случаях, когда такие колебания недопустимы, следует использовать алгоритм основной настройки, а для его работы необходима начальная информация о системе.
Задача точной (основной) настройки регулятора (ТНР) – уточнение настройки системы по завершении этапа ПНР или в процессе эксплуатации системы. На этом этапе также используется активное воздействие на объект, но в более узком диапазоне, допустимом в конкретном технологическом процессе.
В работах МЭИ разработано несколько вариантов настройки регуляторов, отличающихся способом оценки частотных характеристик системы (рис. 1). Одни из них возбуждают автоколебания с помощью генератора синусоидальных колебаний (ГСК), рис. 1, а, а другие – с помощью релейного элемента(компаратора), рис. 1, б.
В приборе ТРМ101 для основной настройки регулятора применяют ГСК. Этот метод обеспечивает лучшую помехозащищенность системы и алгоритма настройки, а также плавность изменения сигнала на входе регулятора, что особенно важно для ПИД-закона. Однако при использовании ГСК нужно хотя бы приблизительно знать диапазон рабочих частот системы, кроме того, во время настройки система должна быть замкнута.
Предварительная настройка регулятора
В настоящей статье мы поговорим об алгоритме ПНР только для регулятора с аналоговым выходом, используемого для управления объектами типов «нагреватель» и «холодильник». Особенности алгоритма для регулятора с импульсным выходом будут рассмотрены отдельно.
Для реализации алгоритма ПНР в контур регулирования включают двухпозиционный релейный элемент с зоной возврата 2Δв. (рис. 2, а). Зона возврата задается как некоторая доля допустимого отклонения регулируемой величины от уставки dTmax, определяемого требованиями технологического процесса. Выходной сигнал регулятора Y при этом принимает фиксированные нижнее Y1 или верхнее Y2 значения (рис. 2, б).
Рис. 2. Предварительная настройка регулятора: а – регулируемая величина; б – выходной сигнал регулятора
При включении ПНР в системе возникает незатухающий автоколебательный процесс (рис. 2, а). При превышении температурой верхнего предельного значения Туст + Δв (точка 1 на рис. 2, а) выходной сигнал регулятора изменяется с верхнего значения Y2 на нижнее Y1. Через некоторое время температура начинает падать, и при переходе через значение Туст – Δв (точка 2) выходной сигнал регулятора снова изменяется с Y1 на Y2. Температура по инерции еще некоторое время продолжает падать, далее процесс повторяется, т. е. возникает автоколебание.
В ходе ПНР определяются основные параметры регулятора:
Хп – полоса пропорциональности;
Ти – постоянная времени интегрирования;
Тд – постоянная времени дифференцирования.
Для индикации этих параметров в приборе используются символы:
Прибор также определяет параметры автоколебательного процесса: минимальное Еmin и максимальное Emax значения рассогласования Е, продолжительность периода колебаний Тn, а также интервал времени Ta, в течение которого выходной сигнал регулятора имеет предельное значение Y2. Из значений параметров автоколебательного процесса вычисляются параметры модели объекта: коэффициент объекта Км и постоянная времени объекта Тм, зная которые, а также коэффициент α, прибор вычисляет в первом приближении параметры ПИД-регулятора:
Хп= k1 * F1(Kм, Tм, α);
Ти= k2 * F2(Kм, Tм, α);
Тд = Ти * α,
где F1 и F2 – некоторые функции оптимальных параметров регулятора в зависимости от параметров объекта;
k1 и k2, α = Тд /Ти – заданные пользователем коэффициенты (по умолчанию k1 = 0,32, k2 = 5, α = 0,1…0,25).
Вычисленные значения Хп и Ти присваиваются параметрам регулятора, после чего ПНР отключается, и система регулирования переходит в режим нормальной работы.
Параметры фильтра и период следования импульсов
В ходе предварительной настройки помимо основных параметров прибор определяет постоянную времени τf сглаживающего фильтра, служащего для подавления помех на входе регулятора.
Фазовый сдвиг dF, вносимый сглаживающим фильтром в контур регулирования, при резонансной частоте замкнутой системы с периодом колебаний Трез не должен превышать заданной величины dFmax. Период колебаний Трез, соответствующий области резонансной частоты замкнутой системы, оценивается по значению Ти:
Тогда при dFmax = 0,1 радиан рабочая формула для расчета τf приобре-
тает следующий вид:
Зная период резонансных колебаний Трез, легко определить значение периода следования управляющих импульсов Тсл. При выполнении условия
Тсл ≤ 0,01 Трез работа импульсной АСР практически не отличается от работы непрерывной системы.
Выполнение ПНР
Описанная процедура ПНР выполняется автоматически: оператор запускает настройку несколькими простыми действиями.
1.Вызвать меню и выбрать Lvop.
2.Войти в опцию Anr (тип автонастройки регулятора), выбрать и ввести Pnr.
3.Войти в опцию r_S (запуск/остановка регулятора), выбрать и ввести Run.
4.Войти в опцию At (запуск/остановка автонастройки), выбрать и ввести run.
Переход в режим ПНР отображается светодиодным индикатором «ПН». Кроме того. оператор может наблюдать по цифровым индикаторам за изменением регулируемой величины и выходного сигнала регулятора. По окончании ПНР параметр At приобретает значение Stop.
Корректировка результатов ПНР
Пользователь с достаточной квалификацией имеет возможность корректировать значения параметров Y1, Y2, dTmax, k1 и k2 и тем самым влиять на ход и результаты ПНР.
- Если в ходе настройки колебания регулируемой величины T имеют слишком большой «заброс» выше заданного значения Туст, то рекомендуется уменьшить верхнее ограничение выходного сигнала регулятора Y2. Если же колебания величины T имеют слишком большой «заброс» ниже Туст, то следует поднять нижнее ограничение Y1.
- Если колебания слишком несимметричны по времени, а именно отношение Ta/Тn:
меньше 0,2, то рекомендуется одновременно уменьшить Y1 и Y2;
больше 0,8, то рекомендуется одновременно увеличить Y1 и Y2. - Если колебания имеют приемлемую симметричность, но слишком большую амплитуду, то следует уменьшить диапазон изменения выходного сигнала регулятора Y1 – Y2 при сохранении среднего значения Yср. Можно также уменьшить значение допустимого отклонения от уставки – dTmax.
- Если по завершении этапа ПНР колебания затухают медленно, то это
свидетельствует о заниженном значении Хп. В этом случае для повышения точности следует уменьшить значение параметра k1. - Если в процессе регулирования колебания вовсе отсутствуют, то это свидетельствует о завышенном значении Хп. Тогда для повышения быстродействия и точности системы следует увеличить k1.
- Если процесс регулирования величины Т имеет колебательность, близкую к оптимальной, но значения Т не переходят через Туст, то это свидетельствует о завышенном значении Ти. В этом случае рекомендуется уменьшить значение параметра k2.
- Если в процессе регулирования колебания имеют почти симметричный характер относительно Туст, то это свидетельствует о заниженном значении Ти, поэтому следует увеличить k2.
Скорректировав значения параметров k1 и k2, Y1 и Y2 , а также dTmax следует еще раз запустить ПНР. Значения k1 и k2 не рекомендуется изменять более чем в 1,5 раза относительно исходных (введение по умолчанию).
Основная настройка регулятора
Основная настройка регулятора обеспечивает минимальную ошибку при достаточном затухании процессов регулирования в системе (степень затухания ≥ 0,9). Для выполнения указанных требований используется косвенный критерий оптимальности, базирующийся на важном свойстве:
Графики комплексных частотных характеристик (КЧХ) замкнутых систем регулирования при оптимальной настройке регулятора в окрестности резонансной частоты оказываются идентичными.
Параметрам регулятора Хп и Ти (рис. 3) задаются некоторые начальные значения, обеспечивающие работоспособность и устойчивость АСР. На вход регулятора в дополнение к уставке подается синусоидальный сигнал Xг от ГСК (см. рис. 1, б):
Xг = Aг*sin(2*π*tsin/Tг),
где tsin – время от начала каждого периода;
Aг и Tг – амплитуда и период колебаний сигнала ГСК, соответственно.
На выходе системы возникают периодические колебания регулируемой величины Т с периодом Тг. После получения установившихся колебаний рассчитываются параметры КЧХ системы в диапазоне рабочих частот, находящемся в окрестности ее резонансной частоты ωрез (отношение амплитуд Rзс(ωk) = АТ/Аг и фазовый сдвиг Fзс(ωk) = FТ – Fг). Здесь АT – амплитуда колебаний регулируемой величины; FТ и Fг – фаза регулируемой величины и сигнала ГСК, соответственно.
Далее осуществляется проверка косвенного критерия оптимальности (1)…(3). При положительном результате проверки настройка заканчивается.
Рис. 3. Блок-схема алгоритма основной настройки регулятора
Косвенный критерий оптимальности
Настройка регулятора является оптимальной, если после подачи сигнала ГСК с частотой ωk отношение амплитуд Rзс(ωk) и фазовый сдвиг Fзс(ωk) между колебаниями на выходе и входе системы в установившемся режиме имеют заданные значения Rзс.о и Fзс.0, т.е.
а период колебаний Тг.k = 2π/ωk связан с установленной в регуляторе постоянной времени интегрирования Ти заданным соотношением
Для объектов с типовыми динамическими свойствами зависимость косвенных показателей от динамических свойств объекта является слабой, поэтому во многих практических случаях при вычислениях используют постоянные значения, например при α = 0,25
Эти значения могут быть уточнены при наличии информации о динамике объекта или по результатам предварительных работ по наладке системы. Например, для получения большего затухания процессов можно уменьшить значение Rзс.0 до 1,1…1,2.
Если условия критерия (1)…(3) не выполняются, рассчитываются новые значения параметров Xп, Ти и Тг и осуществляется очередной (k+1)-й шаг настройки АСР путем повторения указанных выше действий, начиная с ввода параметров Хп и Ти и возбуждения периодических колебаний сигнала ГСК с новым значением Тг.
На каждом шаге настройки значения Rзс(ωk) и Fзс(ωk) получают путем усреднения их текущих значений по нескольким периодам NZ. Количество периодов определяется на каждом шаге настройки сравнением среднеквадратического отклонения SKO среднего значения Rзс(ωk) с допустимым значением ESKO. С увеличением числа периодов колебаний текущее значение SKO уменьшается. Момент завершения вычисления Rзс на k-м шаге определяется выполнением условия
Если это условие не выполняется, процесс возбуждения и анализа колебаний продолжается с течение следующего периода. Максимальное число периодов NZ.max ограничено. По умолчанию вводятся значения: ESKO = 0,15; NZ.max = 10. Если же при NZ.max = 10 требуемая точность не достигнута, работа алгоритма прекращается и восстанавливаются исходные значения параметров регулятора.
При выполнении условия (5) осуществляется переход к следующему блоку алгоритма: проверке условий оптимальности настройки системы.
Выбор амплитуды сигнала ГСК
Эффективность и продолжительность точной настройки во многом зависит от значения амплитуды Aг и периода колебаний Тг сигнала ГСК. Начальное значение Aг вычисляется как заданная доля величины dTmax:
где dTmax – допустимое значение отклонения регулируемой величины от уставки.
Другим условием выбора амплитуды Aг является диапазон выходного сигнала регулятора – от 0 до 100 %. Для этого по рассчитанному в ходе ПНР значению Ta /Tn оценивается значение выходного сигнала регулятора Yср:
Расстояние от Yср до ближайшего предела выходного сигнала регулятора Y1 (или Y2) принимается в качестве максимальной амплитуды AР сигнала Y:
Затем по модели объекта вычисляется амплитуда колебаний Ат регулируемой величины Т при действии на вход объекта периодических колебаний сигнала регулятора с амплитудой Ар и периодом Тг. Зная, что в оптимально настроенной замкнутой системе при резонансной частоте соотношение Ат/Ар = 1,4, определяем амплитуду Ак сигнала ГСК.
Кроме того, для превышения Аг над случайными помехами учитывается ограничение по минимальному значению:
Проверка условий оптимальности настройки системы
Для проверки условий оптимальности настройки системы предусмотрено три этапа, отличающихся видом анализируемых показателей и параметров.
Первый этап проверки оптимальности осуществляется сравнением текущих значений величин Rзс(ωk), Fзс(ωk) и (Тk/Ти) с их оптимальными значениями Rзс.0, Fзс.0 и b3. Допустимые относительные отклонения этих величин сравниваются с параметрами dRs и dGs, задаваемые пользователем. По умолчанию их значения dRs=0,15. При положительном результате проверки на стройка заканчивается. В противном случае выполняются следующие действия:
- расчет параметров модели объекта: безразмерной частоты Ωk = ωk * Тм и коэффициента пропорциональности разомкнутой системы Кk = (Кп * Км)k;
- расчет параметров нового (k+1)-го шага приближения к оптимуму: параметров регулятора п; Ти> и предполагаемого периода колебаний Тг (в окрестности резонансной частоты) из условия выполнения требований (1)…(3).
В связи с тем, что нарушение условий (1)…(3) может быть связано не с параметрами регулятора, а с периодом колебаний, до выполнения нового шага осуществляются дополнительные (второй и третий этапы) проверки оптимальности настройки системы.
Второй этап проверки состоит в расчете значений параметров КЧХ замкнутой системы при заданной фазе Fзc.0: частоты Ωг.k, модуля Rзc(Ωг.k, Кп, Ти, α) и отношения Тг.k,/Ти которые вычисляются по модели системы, и в их сравнении с оптимальными (заданными) значениями. При положительном результате проверки настройка заканчивается.
Третий этап проверки – сопоставление значений параметров регулятора для нового (k+1)-го и текущего k-го шагов. При несущественном их различии настройка заканчивается. Иначе реализуется очередной шаг настройки.
Вычисления параметров (k+1)-го шага выполняются с использованием математической модели системы, содержащей ПИД-регулятор и объект с коэффициентами Км и Тм. Модель объекта состоит из цепочки из двух инерционных (апериодических) звеньев и звена запаздывания с постоянными времени Т1, Т2, τ и коэффициентом пропорциональности Км.
Параметры Км и Т1 определяются по значениям Rзс(ωk) и Fзс(ωk), а параметры Т2 и τ связаны с параметром Т1 через коэффициенты β = τ/Т1 и n = Т2 /Т1 , зависящие от динамических свойств объекта. По умолчанию в ТРМ101 β = 1,0; n = 20, эти значения характерны для систем регулирования температуры, например, в электрических печах. На конкретной системе значения β и n могут быть уточнены, например, по данным предварительных испытаний.
Параметры нового шага рассчитываются из значений Rзc.k и Fзc.k замкнутой системы, из которых вычисляются соответствующие параметры разомкнутой системы Rpc.k и Fpc.k. Это дает возможность составить два уравнения:
где Rр(ω) и Rм(ω) – амплитудно-частотные характеристики регулятора и модели объекта, соответственно;
Fр(ω)Fм(ω) – фазо-частотные характеристики регулятора и модели объекта, соответственно.
Из уравнения (7) находят Т1, после чего из уравнения (6) вычисляют Км. После расчета параметров модели объекта вычисляются новые значения параметров регулятора Кп. k + 1, Ти.k+1 и резонансной частоты ωk+1 для очередного (k+1)-го шага путем решения системы трех уравнений (1)…(3) относительно переменных Кп, Ти и ωk при неизвестных Км, Т1 и α.
Выполнение и корректировка ТНР
Запуск точной настройки для неискушенного пользователя осуществляется также легко, как и предварительной, только выбирается тип автонастройки Sin. Начало ТНР также показывает светодиодный индикатор «ТН».
Рис. 4. График изменения температуры электропечи
В алгоритме предусмотрен ряд дополнительных действий по обеспечению эффективности и безопасности настройки системы в производственных условиях, в частности корректировка длины шага для параметров Кп, Ти с учетом результатов предыдущих шагов, корректировка амплитуды сигнала ГСК и начальных параметров регулятора с учетом технологических ограничений и др. На рис. 4 приведен пример настройки регулятора ТРМ101 с начальными значениями
dTmax = 5 о C и Аг = 2,5 о С.
Участок 1 – режим ПНР, совмещенный с процессом включения электропечи; участки 2 и 3 – ТНР, где на участке 2 – начальные значения параметров настройки, на участке 3 – конечные.
Результаты настройки:
• для режима ПНР: ê = Xп = 19,8 о C;
i =Tи= 131; d = Tд = 19 с.
• для режима ТНР: ê = Xп = 15,3 о C;
i = Tи = 99; d = Tд = 14 с.
НПФ «Термикс»: результаты испытаний
Микропроцессорный регулятор температуры ТРМ101, разработанный и изготовленный фирмой ОВЕН, был испытан в НПФ «ТЕРМИКС» на серийных лабораторных электропечах различных типов в диапазоне температур 100 … 1100 °С. В процессе испытаний проверялась работа регуляторов с термопарами различных градуировок: хромель — копель, хромель — алюмель и платина — платинородий.
Проведенные испытания позволили сформулировать следующие выводы.
1. Испытанные регуляторы обеспечивают высокую точность и стабильность поддержания температуры во всем указанном выше диапазоне рабочих температур с соответствующими термопарами перечисленных типов.
2. Новый алгоритм предварительной настройки обеспечивает быстрый подбор близких к оптимальным значений параметров регулятора и достаточно быстрый нагрев объекта при отсутствии «выбега температуры», что в большом количестве случаев является существенным требованием
технологии.
3. Наличие в регуляторе режима точной настройки существенно расширяет возможности прибора, так как позволяет отрабатывать технологические
процессы на реальной загрузке. Поскольку при настройке регулятора можно задать безопасную величину «выбегов» температуры, происходящих в ходе переходных процессов, отпадает опасность повреждения загрузки.
4. Два индикатора облегчают настройку и эксплуатацию прибора, позволяют сократить количество ошибок оператора.
5. Универсальный вход регулятора значительно расширяет область его применения, обеспечивая возможность выбора типа датчика при настройке, а также изменения его в процессе эксплуатации. Стандартные входы тока и напряжения при наличии соответствующих датчиков позволяют использовать прибор для регулирования самых разных параметров.
6. Встроенный компаратор обеспечивает контроль за аварийными ситуациями, а также может применяться для программирования таких воздействий на объект, как увлажнение, вакуумирование и т.д.
7. Наличие интерфейса RS-485 увеличивает актуальность регулятора и добавляет ряд новых возможностей: объединение нескольких приборов в сеть с возможностью централизованного управления каждым из них; возможность накопления и архивирования данных о технологических процессах; контроль за исправностью прибора и датчика температуры; отображение хода процесса на экране дисплея; возможность вмешательства оператора (особенно важно в аварийных ситуациях) и т.п.
PID Регулятор ОВЕН ТРМ101 (Руководство По Эксплуатации)
ОВЕН ТРМ101 – это многофункциональный ПИД-регулятор, специально адаптированный для разнообразных технологических процессов. Для придания уникальности его настройке, вы можете разработать интуитивно понятный пользовательский интерфейс с графической оболочкой, который позволит операторам легко настраивать и мониторить параметры процесса, даже без глубоких знаний в области регулирования. Это делает ОВЕН ТРМ101 более доступным и гибким инструментом для точного контроля температуры, давления и других физических величин в широком спектре технологических оборудований, включая экструдеры, термопластавтоматы, печи, упаковочное, полиграфическое, вакуум-формовочное оборудование и многое другое.
Технические характеристики
Питание
| Напряжение питания | 90…245 В частотой 47…63 Гц |
Универсальный вход 1
| Предел допустимой основной погрешности измерения входного параметра | ±0.5 % |
| Входное сопротивление при подключении источника сигнала: | |
| — тока | 100 Ом ± 0.1 % |
| — напряжения | не менее 100 кОм |
Дополнительный вход 2
| Сопротивление внешнего ключа: | |
| — в состоянии «замкнуто» | 0…1 кОм |
| — в состоянии «разомкнуто» | более 100 кОм |
Интерфейс связи
| Тип интерфейса | RS-485 |
| Скорость передачи | 2.4; 4.8; 9.6; 14.4; 19.6; 28.8; 38.4; 57.6; 115.2 кбит/с |
Характеристики выходных устройств
| Обозначение | Тип выходного устройства (ВУ) | Электрические характеристики |
| Р | электромагнитное реле | 1 А (ПИД-регулирование) 8 А (сигнализация) при 220 В 50…60 Гц, cos > 0.4 или 30 В пост. тока |
| К | транзисторная оптопара структуры n-p-n типа | 200 мА при 50 В пост. тока |
| С | симисторная оптопара | 50 мА при 240 В (пост. откр. симистор) или 0.5 А (симисто вкл. с частотой не более 502 Гц и tимп. = 5 мс) |
| И | цифроаналоговый преобразователь «параметр-ток 4…20 мА» | нагрузка 0…1000 Ом, напряжение питания 10…30 В пост. тока |
| У | цифроаналоговый преобразователь «параметр-напряжение 0…10 В» | нагрузка не менее 2 кОм, напряжение питания 15…32 В |
| Т | выход для управления твердотельным реле | выходное напряжение 4…6 В, максимальный ток 50 мА |
Характеристики измерительных датчиков
| Код in-t | Тип датчика | Диапазон измерений |
| r385 | ТСП50 W100 = 1.385 | -200…+750 о С |
| r.385 | ТСП100 W100 = 1.385 (Pt100) | -200…+750 о С |
| r391 | ТСП50 W100 = 1.391 | -200…+750 о С |
| r.391 | ТСП100 W100 = 1.391 | -200…+750 о С |
| r-21 | ТСП гр.21 (R0 = 46 Ом, W100 = 1.391) | -200…+750 о С |
| r426 | ТСМ50 W100 = 1.426 | -50…+200 о С |
| r.426 | ТСМ100 W100 = 1.426 | -50…+200 о С |
| r-23 | ТСМ гр. 23 (R0 = 53 Ом, W100 = 1.426) | -50…+200 о С |
| r428 | ТСМ50 W100 = 1.428 | -190…+200 о С |
| r.428 | ТСМ100 W100 = 1.428 | -190…+200 о С |
| E_А1 | термопара ТВР (А-1) | 0…+2500 о С |
| Е_А2 | термопара ТВР (А-2) | 0…+1800 о С |
| Е_А3 | термопара ТВР (А-3) | 0…+1800 о С |
| Е_ _b | термопара ТПР (В) | +200…+1800 о С |
| Е_ _J | термопара ТЖК (J) | -200…+1200 о С |
| Е_ _К | термопара ТХК (К) | -200…+1300 о С |
| Е_ _L | термопара ТХК (L) | -200…+800 о С |
| Е_ _n | термопара ТНН (N) | -200…+1300 о С |
| Е_ _r | термопара ТПП (R) | 0…+1750 о С |
| Е_ _S | термопара ТПП (S) | 0…+1750 о С |
| Е_ _t | термопара ТМК (Т) | -200…+400 о С |
| i 0_5 | ток 0…5 мА | 0…100 % |
| i 0.20 | ток 0…20 мА | 0…100 % |
| i 4.20 | ток 4…20 мА | 0…100 % |
| U-50 | напряжение -50…+50 мВ | 0…100 % |
| U0_1 | напряжение 0…1 В | 0…100 % |
Панель управления и элементы индикации
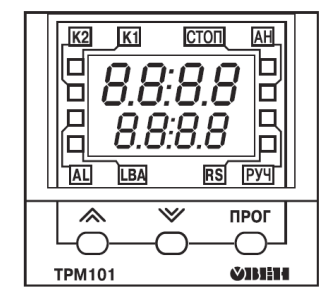
Свечение светодиодов на приборе имеет следующее значение:
- К1 – Светодиод «К1» горит, когда ВУ 1 (Вентиль Управления 1) включен.
- К2 – Светодиод «К2» горит, когда ВУ 2 (Вентиль Управления 2) включен.
- AL – Светодиод «AL» мигает, если регулируемая величина выходит за заданные пределы (пределы сигнализации).
- LBA – Светодиод «LBA» мигает, если обнаружен обрыв в цепи регулирования.
- СТОП – Светодиод «СТОП» постоянно светится, если регулятор остановлен, и мигает, если остановка регулятора произошла из-за аварии LBA или аппаратной ошибки.
- АН – Светодиод «АН» постоянно светится при выполнении автонастройки, гаснет при успешном завершении автонастройки и мигает, если автонастройка закончена неудачно.
- RS – Светодиод «RS» засвечивается на 1 секунду в момент передачи данных компьютеру.
- РУЧ – Светодиод «РУЧ» светится в режиме ручного управления выходным сигналом ПИД-регулятора.
Кнопки, находящиеся на лицевой панели прибора, имеют следующее назначение:
▲ – для увеличения значения программируемого параметра;
▼ – для уменьшения значения программируемого параметра;
ПРОГ – для входа в меню программирования или для перехода к следующему параметру.
Схема подключения
Приведенные инструкции касаются правильной установки и подключения датчиков температуры (термосопротивлений и термопар) к приборам и оборудованию. Важно соблюдать эти инструкции, чтобы обеспечить надежную и безопасную работу системы мониторинга температуры. Вот их краткое изложение:
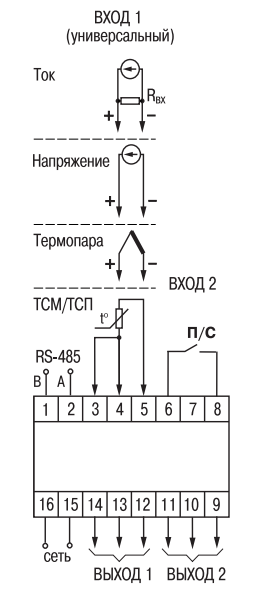
- Подсоединение связей: Подсоединяйте связи в следующем порядке: сначала подключите датчик к линии, а затем линию к клеммнику прибора.
- Экранирование линии связи: Рекомендуется экранировать линию связи между прибором и датчиком. Экранирование помогает предотвратить внешние помехи.
- Изоляция «земли» прибора: Не объединяйте «землю» (заземление) прибора с заземлением оборудования. Это может помочь избежать замыканий и снизить риск повреждения прибора.
- Прокладка линии связи: Не прокладывайте линию связи «датчик–прибор» в одной трубе с силовыми проводами, которые могут создавать высокочастотные или импульсные помехи. Это может повлиять на точность измерений.
- Подключение термосопротивлений: При подключении термосопротивлений удостоверьтесь, что провода равной длины и сечения для обеспечения точности измерений.
- Подключение термопар: Подключайте термопары к прибору с использованием компенсационных (термоэлектродных) проводов, изготовленных из тех же материалов, что и термопара, или с аналогичными термоэлектрическими характеристиками в диапазоне температур 0…100°С.
- Соблюдение полярности: При соединении компенсационных проводов с термопарой и прибором следите за правильной полярностью, чтобы избежать ошибок в измерениях.
- Электрическая изоляция: Рабочий спай термопары должен быть электрически изолирован от заземленного оборудования, чтобы предотвратить короткое замыкание и обеспечить безопасность работы.
Схемы подключения модификаций ВУ1
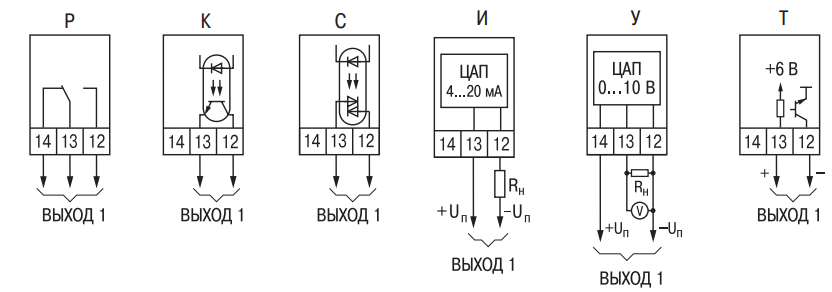
Схемы подключения модификаций ВУ2
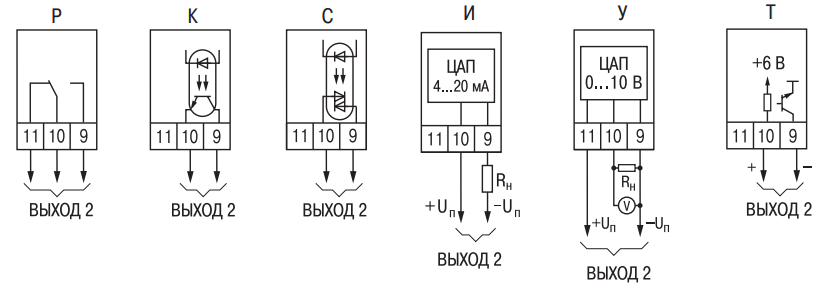
Функциональная схема прибора
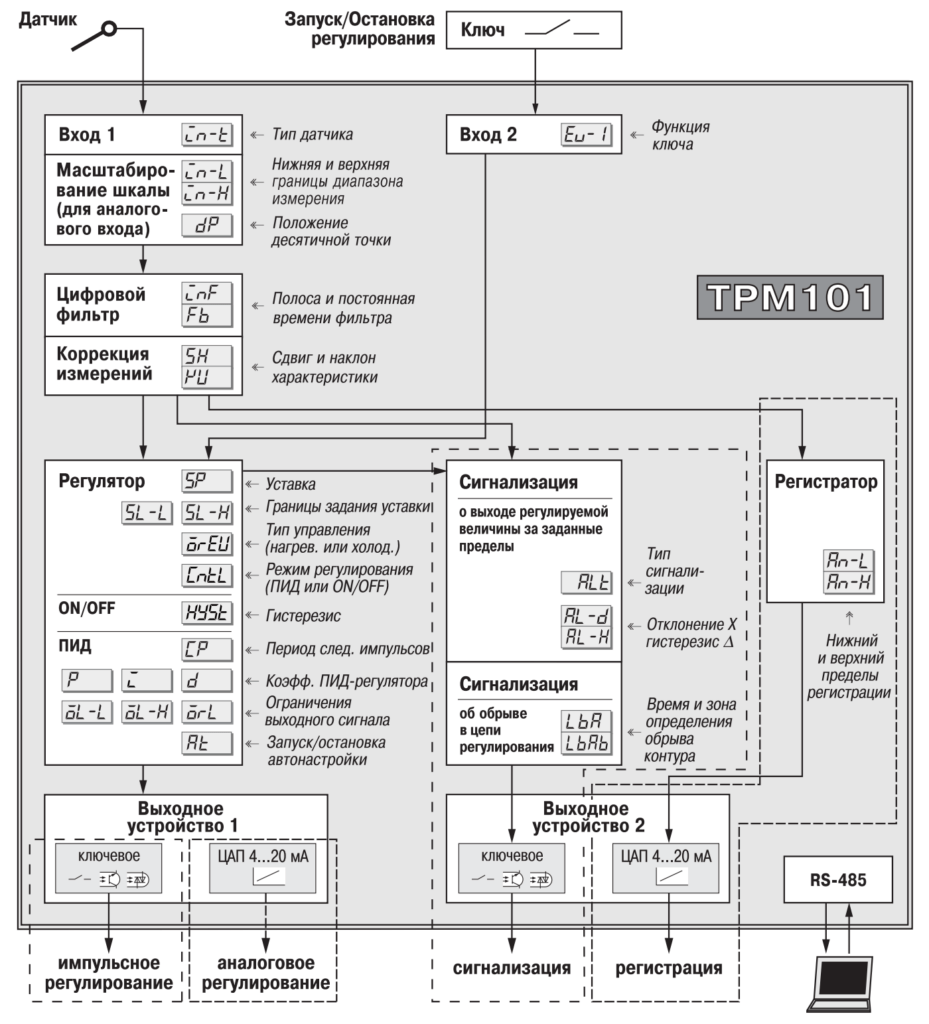
Настройка
Основные параметры прибора организованы в 5 групп: LuOP, init, AdV, COMM и LMAN, которые представляют собой меню на приборе. Каждая из этих групп содержит набор параметров, отвечающих за различные функции и настройки прибора. Вот краткое описание каждой группы:
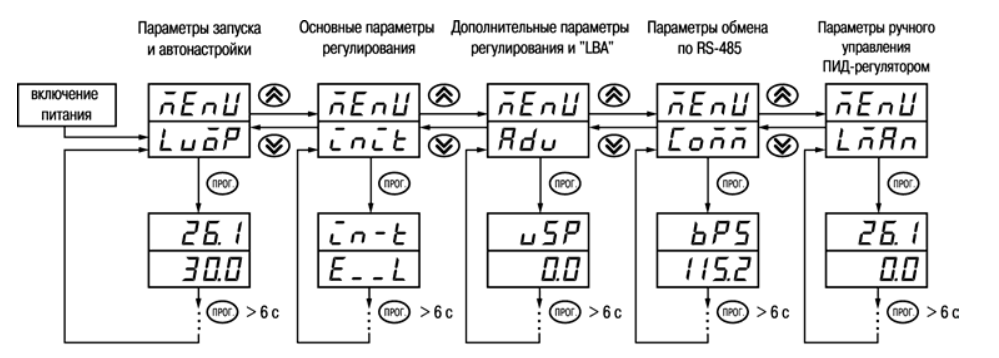
- Группа LuOP (Low-Level Operating Parameters): Включает параметры, которые управляют основными режимами работы прибора. Это включает в себя параметры, связанные с запуском регулирования, включением автонастройки и установкой значения уставки.
- Группа init (Initialization Parameters): Содержит параметры, которые связаны с настройками входа прибора, управлением вентилями (ВУ) и устройствами сигнализации. Здесь можно настроить параметры, необходимые для инициализации и корректной работы прибора.
- Группа AdV (Advanced Parameters): Включает в себя продвинутые параметры, которые позволяют пользователю более глубоко настраивать работу ПИД-регулятора и других функций прибора. Это могут быть параметры, связанные с точной настройкой ПИД-регулятора или фильтрацией данных.
- Группа COMM (Communication Parameters): В этой группе параметров находятся настройки интерфейса RS-485, который используется для коммуникации прибора с другими устройствами. Эти параметры позволяют настроить протоколы связи и другие параметры передачи данных.
- Группа LMAN (Local Management Parameters): Содержит параметры, связанные с ручным управлением ПИД-регулятором и, возможно, другими функциями прибора на месте его эксплуатации. Это может включать в себя ручную настройку выходных сигналов и контроль за процессом регулирования.
Программируемые параметры
Для входа в режим программирования находясь в режиме работа, нажать кнопку ПРОГ и удерживать не менее 3 с.
- Звездочкой (*) выделены параметры, на которые влияет настройка dP «Положение десятичной точки».
- PV и O представляют собой оперативные параметры, которые непрерывно изменяются в процессе работы прибора и хранятся в оперативной памяти (ОЗУ) устройства. Для этих параметров доступно только чтение, а их нельзя изменять через интерфейс.
- Форматы данных:
- UB (unsigned byte): Этот формат использует беззнаковый байт.
- T (unsigned byte с отображением символами): Тип «T» использует беззнаковый байт для представления данных, но их отображение на индикаторе осуществляется с использованием символов, а не чисел. Соответствие между значением и его изображением на индикаторе приведено в правой колонке таблицы.
- I (unsigned short int — 2 байта): Этот формат данных представляет собой два беззнаковых байта.
- F24 (float 24 — 3 байта): Параметр «F24» использует три байта для представления числа с плавающей запятой.
- ASCII (строка ASCII символов — 8 байт) (ТОЛЬКО ДЛЯ ЧТЕНИЯ): Этот формат предназначен только для чтения и используется для представления строк символов ASCII.
| Наименование | Hashкод (в 16-ой cис. счисления) | Формат представления данных | Характеристика | Диапазон значений | |
| на приборе | в сети | ||||
| Группа LvoP Рабочие параметры прибора | |||||
| PV* (оперативный) | B8DF | F24 | Измеренное значение входной величины или код ошибки: 0xFD — ошибка на входе 0xFE — отсутствие связи с АЦП — 0xF0 вычисленное значение заведомо не верно (ответ при наличии Er.64) | Определяется диапазоном измерения датчика | |
| SP* | 9107 | F24 | Уставка регулятора | определяется парамет рами SL-L и SL-H | |
| r-S | AF90 | T | запуск/остановка регулирования | StoP | 0 |
| rUn | 1 | ||||
| At | CEA2 | T | запуск/остановка процесса автонастройки | StoP | 0 |
| rUn | 1 | ||||
| o (оперативный) | 35E8 | F24 | Выходная мощность ПИДрегулятора. | 0.0…100.0 | |
| Группа init. Основные параметры прибора | |||||
| in-t | 932D | T | Тип входного датчика или сигнала | ||
| r385 | 1 | ||||
| r.385 | 2 | ||||
| r391 | 3 | ||||
| r.391 | 4 | ||||
| r-21 | 5 | ||||
| r426 | 6 | ||||
| r.426 | 7 | ||||
| r-23 | 8 | ||||
| r428 | 9 | ||||
| r.428 | 10 | ||||
| E-A1 | 11 | ||||
| E-A2 | 12 | ||||
| E-A3 | 13 | ||||
| E__b | 14 | ||||
| E__j | 15 | ||||
| E__K | 16 | ||||
| E__L | 17 | ||||
| E__n | 18 | ||||
| E__r | 19 | ||||
| E__S | 20 | ||||
| E__t | 21 | ||||
| i0_5 | 22 | ||||
| i0.20 | 23 | ||||
| i4.20 | 24 | ||||
| U-50 | 25 | ||||
| U0_1 | 26 | ||||
| Наименование | Hashкод (в 16-ой cис. счисления) | Формат представления данных | Характеристика | Диапазон значений | |||
| на приборе | в сети | ||||||
| dPt | 37C8 | UB | Точность вывода температуры | 0,1 | |||
| dP | B3EB | UB | Положение десятичной точки | 0, 1, 2, 3 | |||
| in-L* | B040 | F24 | Нижняя граница диапазона измерения | -1999…9999 | |||
| in-H* | 665D | F24 | Верхняя граница диапазона измерения | ||||
| SL-L* | ABD3 | F24 | Нижняя граница задания уставки | Определяется диапазоном измерения датчика | |||
| SL-H* | 7DCE | F24 | Верхняя граница задания уставки | ||||
| SH* | 39E8 | F24 | Сдвиг характеристики датчика | -500…+500 | |||
| KU | 1A3E | F24 | Наклон характеристики датчика | 0.500 … 2.000 | |||
| inF | C1F5 | F24 | Постоянная времени цифрового фильтра | 0…999 | |||
| Fb* | 39F3 | F24 | Полоса цифрового фильтра | 0…9999 | |||
| An-L* | 2E44 | F24 | Нижняя граница регистрации ЦАП2 | диапазона | Определяется диапазоном измерения датчика | ||
| An-H* | F859 | F24 | Верхняя граница регистрации ЦАП2 | диапазона | |||
| Ev-1 | 2C92 | T | Функция ключа на дополнительном входе | nonE | 0 | ||
| n-o | 1 | ||||||
| n-C | 2 | ||||||
| ALt | E26E | UB | Тип логики работы компаратора | 00 | |||
| 01 | |||||||
| 02 | |||||||
| 03 | |||||||
| 04 | |||||||
| 05 | |||||||
| 06 | |||||||
| 07 | |||||||
| 08 | |||||||
| 09 | |||||||
| 10 | |||||||
| 11 | |||||||
| AL-d* | 021D | F24 | Порог срабатывания компаратора | определяется параметрами in-L и in-H | |||
| AL-Н* | B1B7 | F24 | Гистерезис компаратора | 0… in-H | |||
| orEU | 4C96 | T | Тип управления при регулировании | or-r | 0 | ||
| or-d | 1 | ||||||
| CP | 7AFF | UB | Период следования управляющих импульсов | 1…250 | |||
| Группа Adv. Параметры регулирования и “LBA” | |||||||
| vSP* | 7B39 | F24 | Скорость изменения уставки | 0…9999 | |||
| cntL | EBCA | Т | Режим регулирования | Pid | 0 | ||
| onoF | 1 | ||||||
| Наименование | Hashкод (в 16-ой cис. счисления) | Формат представления данных | Характеристика | Диапазон значений | ||
| на приборе | в сети | |||||
| HYST * | 5987 | F24 | Гистерезис двухпозиционного регулятора | 0…9999 | ||
| onSt | BE88 | Т | Состояние выхода в режиме «остановка регулирования» | oFF | 0 | |
| on | 1 | |||||
| onEr | 3041 | Т | Состояние выхода в режиме «ошибка» | oFF | 0 | |
| on | 1 | |||||
| ramP | A60C | T | Режим “быстрого выхода на уставку ” | oFF | 0 | |
| on | 1 | |||||
| P* | FCFC | F24 | Полоса пропорциональности ПИДрегулятора | 1…9999 при dp = 0 0.001…9.999 при dp = 3 | ||
| i | 5D6B | F24 | Интегральная постоянная ПИДрегулятора | 0…3999 | ||
| d | 2DFA | F24 | Дифференциальная постоянная ПИДрегулятора | 0…3999 | ||
| db* | 248C | F24 | Зона нечувствительности ПИДрегулятора | 0…200 | ||
| oL-L | 912D | F24 | Минимальная выходная мощность (нижний предел) | От 0 до oL-H | ||
| oL-H | 4730 | F24 | Максимальная выходная мощность (верхний предел) | От oL-L до100 | ||
| orL | 7C8E | F24 | Максимальная скорость изменения выходной мощности | 0,21…100 | ||
| mvEr | CAD3 | F24 | Значение выходной мощности в состоянии «ошибка». | 0…100 | ||
| mvSt | 441A | F24 | Значение выходной мощности в состоянии «остановка регулирования». | 0…100 | ||
| mdSt | D37D | T | Состояние выхода в режиме «остановка регулирования». | mvSt | 0 | |
| o | 1 | |||||
| LBA | 60AE | I | Время диагностики обрыва контура | 0…9999 | ||
| LbAb* | 186A | F24 | Ширина зоны диагностики обрыва контура | 0…9999 | ||
| Группа Comm. Параметры обмена по интерфейсу | ||||||
| Addr | 9F62 | I | Базовый адрес прибора в сети | 0…2047 | ||
| rSdL | 1E25 | UB | Задержка при ответе по RS485 | 1…45 | ||
| A.LEn | 1ED2 | T | Длина сетевого адреса | 8b | 0 | |
| 11b | 1 | |||||
| bPS | B760 | T | Скорость обмена в сети | 2.4 | 0 | |
| 4.8 | 1 | |||||
| 9.6 | 2 | |||||
| 14.4 | 3 | |||||
| 19.2 | 4 | |||||
| 28.8 | 5 | |||||
| 38.4 | 6 | |||||
| 57.6 | 7 | |||||
| 115.2 | 8 | |||||
| Наименование | Hashкод (в 16-ой cис. счисления) | Формат представления данных | Характеристика | Диапазон значений | |||||||
| на приборе | в сети | ||||||||||
| Группа сервисных параметров ( невидимые) | |||||||||||
| LEn | 523F | T | Длина слова данных | 8 | 1 | ||||||
| PrtY | E8C4 | T | Сос-ние бита четности в посылке | nonE | 0 | ||||||
| Sbit | B72E | T | Количество стоп-бит в посылке | 1 | 0 | ||||||
| VER | 2D5B | ASCII | Версия программы | V02.00xx | |||||||
| Dev | D681 | ASCII | Тип прибора | ТРМ101 | |||||||
| APLY | 8403 | Команда перехода на новые сетевые настройки | |||||||||
| INIT | 00E9 | Команда перезагрузки прибора. Эквивалент выкл/вкл питания. | |||||||||
| N.err | 0233 | I | Код сетевой ошибки при последнем обращении: 0х06 — Значение мантиссы превышает ограничения дескриптора 0x08 — У запрошенного параметра отсутствуют атрибуты 0х28 – Не найден дескриптор 0х31 – Размер поля данных не соответствует ожидаемому 0х32 – Значение бита запроса не соответствует ожидаемому 0х33 – Редактирование параметра запрещено индивидуальным атрибутом 0х34 – Недопустимо большой линейный индекс 0х47 – Недопустимое сочетание значений параметров (Редактирование параметра заблокировано значением другого или значениями нескольких других) 0х48 – Ошибка при чтении EEPROM (ответ при наличии Er.64) | ||||||||
| Команды установки атрибутов | |||||||||||
| Наименование | Hashкод (в 16-ой cис. счисления) | Формат представления данных | Характеристика | Диапазон значений | |||||||
| на приборе | в сети | ||||||||||
| Группа LmAn (ручное управление) Виден при CNTL = PID, R−S = RUN, AT = STOP | |||||||||||
| o-Ed | 8DF6 | F24 | Устанавливаемое значение выходной мощности | 0…100 | |||||||
| o. (оперативный) | 5162 | F24 | Текущее значение выходной мощности ПИД-регулятора | 0…100 | |||||||
| Параметры секретности(группа скрыта под паролем PASS=100) | |||||||||||
| EdPt | E70D | T | Защита отдельных параметров от просмотра и изменений (включение или отключение действия атрибутов) | oFF | 0 | ||||||
| on | 1 | ||||||||||
Автонастройка PID регулирования
Установите уставку SP (заданное значение параметра).
Установите параметры следующим образом:
- r-s = RUN (режим работы).
- AT = RUN (запустите автонастройку).
Прибор автоматически вычислит приближенные значения коэффициентов ПИД-регулятора P, I, D, а также INF и CP.
При начале процесса автонастройки загорится светодиод «АН».
По завершении автономной настройки, значение параметра AT изменится на STOP, и светодиод «АН» погаснет.
Список возможных неисправностей
При обнаружении определенных неисправностей, прибор выводит следующие сообщения на верхний цифровой индикатор (ЦИ):
- Err.S – это сообщение указывает на ошибку на входе прибора. Это может быть связано с некорректным или нестабильным входным сигналом.
- Er.Ad – сообщение «Er.Ad» указывает на ошибки внутреннего преобразования. Это может быть связано с неправильным функционированием внутренних аналогово-цифровых или цифро-аналоговых преобразователей в приборе.
- Er.32 – это сообщение указывает на ошибку генерации. Это может быть связано с неисправностью внутренних генераторов частоты или часовых источников в приборе.
| Проявление | Возможная причина | Способ устранения |
| На ЦИ в режиме РАБОТА при подключенном датчике отображаются Err.S | Неисправность датчика | Замена датчика |
| Обрыв или короткое замыкание линии связи «датчик-прибор» | Устранение причины неисправности | |
| Неверно задан тип датчика | По алгоритму установить код, соответствующий используемому датчику | |
| Неверное подключение датчика к прибору | Проверить по руководству по эксплуатации схему подключения прибора и датчиков | |
| Неверно произведено подключение по двухпроводной схеме соединения прибора с ТС | Установить перемычку между клеммами 3-4 | |
| При подключении токового сигнала отсутствует резистор | Подключить к входу прибора нагрузочный резистор. | |
| На ЦИ в режиме РАБОТА отображается |
| Проявление | Возможная причина | Способ устранения |
| На ЦИ в режиме РАБОТА отображается cccc | Измеренная величина меньше значения –199.9 и не может быть отображена на 4-х разрядном ЦИ с точностью 0,1 о С | Установить значение 0 в параметре dPt |
| Значение температуры в режиме РАБОТА на ЦИ не соответствует реальной | Неверно задан тип датчика | По алгоритму, приведенному в п. 6.2.1.1, установить код, соответствующий используемому датчику |
| Введено неверное значение параметра «сдвиг характеристики». | По алгоритму, приведенному в п. 6.2.1.4 установить требуемое значение параметра. Если коррекция не нужна, установить SH = 0.0 | |
| Используется двухпроводная схема соединения прибора с ТС | Воспользоваться рекомендациями Приложения В | |
| Действие электромагнитных помех | Экранировать линию связи датчика с прибором, экран заземлить в одной точке |