У вас большие запросы!
Точнее, от вашего браузера их поступает слишком много, и сервер VK забил тревогу.
Эта страница была загружена по HTTP, вместо безопасного HTTPS, а значит телепортации обратно не будет.
Обратитесь в поддержку сервиса.
Вы отключили сохранение Cookies, а они нужны, чтобы решить проблему.
Почему-то страница не получила всех данных, а без них она не работает.
Обратитесь в поддержку сервиса.
Вы вернётесь на предыдущую страницу через 5 секунд.
Вернуться назад
Регулирование скорости вращения двигателей постоянного тока
. (4.5)
Очевидно, что регулировать ее можно тремя способами:
- Включением добавочного резистора или реостата Rд в цепь обмотки якоря.
- Изменением основного магнитного потока машины.
- Изменением питающего напряжения.
Рассмотрим данные способы на примере двигателя параллельного возбуждения. 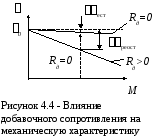 Дополнительное сопротивлениеRдвключают в цепь якоря аналогично пусковому реостату, однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока. При включении реостата в цепь якоря скорость вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата. Это видно из механических характеристик Рисунок4.4. Угловая скорость вращения холостого хода одинакова для естественной и искусственной характеристик. А значения ест и реост (уменьшение угловой скорости вращения при нагрузке) различны. При одном и том же моменте
Дополнительное сопротивлениеRдвключают в цепь якоря аналогично пусковому реостату, однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока. При включении реостата в цепь якоря скорость вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата. Это видно из механических характеристик Рисунок4.4. Угловая скорость вращения холостого хода одинакова для естественной и искусственной характеристик. А значения ест и реост (уменьшение угловой скорости вращения при нагрузке) различны. При одном и том же моменте  . (4.6.) Чем больше Rд , тем круче с увеличением нагрузки падает скорость вращения. Основной недостаток такого метода большие потери энергии в реостате (особенно на малых скоростях вращения). Очевидно, что данный способ позволяет только уменьшать скорость вращения по сравнению со скоростью на естественной характеристике. Для того, чтобы изменить основной поток машины, необходимо регулировать ток возбуждения, для чего в цепь обмотки возбуждения включают регулировочный реостат. Для магнитных потоков Ф1 и Ф2 скорость вращения будет определяться соответственно выражениями
. (4.6.) Чем больше Rд , тем круче с увеличением нагрузки падает скорость вращения. Основной недостаток такого метода большие потери энергии в реостате (особенно на малых скоростях вращения). Очевидно, что данный способ позволяет только уменьшать скорость вращения по сравнению со скоростью на естественной характеристике. Для того, чтобы изменить основной поток машины, необходимо регулировать ток возбуждения, для чего в цепь обмотки возбуждения включают регулировочный реостат. Для магнитных потоков Ф1 и Ф2 скорость вращения будет определяться соответственно выражениями  . (4.7)
. (4.7)  . (4.8) В двигателе с параллельным возбуждением, например, отношения скоростей холостого хода и изменения скоростей вращения при управлении со стороны обмотки возбуждения, обратно пропорциональны изменению магнитного потока:
. (4.8) В двигателе с параллельным возбуждением, например, отношения скоростей холостого хода и изменения скоростей вращения при управлении со стороны обмотки возбуждения, обратно пропорциональны изменению магнитного потока:  . (4.9) Электромеханические характеристики для двух значений потоков приведены на Рисунок 4.5. В
. (4.9) Электромеханические характеристики для двух значений потоков приведены на Рисунок 4.5. В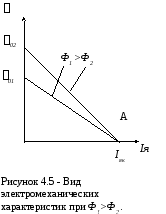 идно, что скоростные характеристики двигателя приФ1>Ф2 не являются параллельными, они пересекаются в точке А (при нулевой скорости вращения. Это объясняется тем, что ток якоря короткого замыкания Iяк не зависит от величины потока, а определяется величинами напряжения и сопротивления цепи якоря (Iяк=U/Rя). Величина же момента изменяется прямопропорционально величине потока, тогда для момента короткого замыкания будет справедливо соотношение
идно, что скоростные характеристики двигателя приФ1>Ф2 не являются параллельными, они пересекаются в точке А (при нулевой скорости вращения. Это объясняется тем, что ток якоря короткого замыкания Iяк не зависит от величины потока, а определяется величинами напряжения и сопротивления цепи якоря (Iяк=U/Rя). Величина же момента изменяется прямопропорционально величине потока, тогда для момента короткого замыкания будет справедливо соотношение  . (4.10) М
. (4.10) М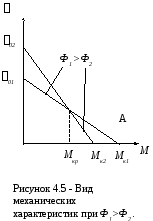 еханические характеристики при Ф1>Ф2 (рисунок 4.6) будут пересекаться при некотором значении критического момента М . Таким образом, с уменьшением магнитного потока угловая скорость вращения холостого хода возрастает, а величина момента короткого замыкания снижается. Тогда, при значениях нагрузочного момента, меньших Мкр уменьшение потока приводит к увеличению скорости вращения, а при значениях больших Мкр, наоборот — к ее снижению. В двигателях параллельного возбуждения средней и большой мощности уменьшение потока используют для повышения скорости вращения, а в микродвигателях поток уменьшают для снижения скорости вращения. Данный способ прост и экономичен, поэтому широко применяется на практике. К его недостаткам следует отнести сравнительно небольшой диапазон регулирования скорости т.е.
еханические характеристики при Ф1>Ф2 (рисунок 4.6) будут пересекаться при некотором значении критического момента М . Таким образом, с уменьшением магнитного потока угловая скорость вращения холостого хода возрастает, а величина момента короткого замыкания снижается. Тогда, при значениях нагрузочного момента, меньших Мкр уменьшение потока приводит к увеличению скорости вращения, а при значениях больших Мкр, наоборот — к ее снижению. В двигателях параллельного возбуждения средней и большой мощности уменьшение потока используют для повышения скорости вращения, а в микродвигателях поток уменьшают для снижения скорости вращения. Данный способ прост и экономичен, поэтому широко применяется на практике. К его недостаткам следует отнести сравнительно небольшой диапазон регулирования скорости т.е.  , (4.11) где min -минимальная угловая скорость ограничивается насыщением магнитной цепи машины (рост магнитного потока ограничен); max-максимальная угловая скорость ограничивается механической устойчивостью двигателя, а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и растет реактивная ЭДС, что повышает опасность возникновения искрения на коллекторе и появления кругового огня. Регулирование скорости вращения двигателя изменением управляющего напряжения применяется лишь при
, (4.11) где min -минимальная угловая скорость ограничивается насыщением магнитной цепи машины (рост магнитного потока ограничен); max-максимальная угловая скорость ограничивается механической устойчивостью двигателя, а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и растет реактивная ЭДС, что повышает опасность возникновения искрения на коллекторе и появления кругового огня. Регулирование скорости вращения двигателя изменением управляющего напряжения применяется лишь при  Iв=const, т.е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Iв=const, т.е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении. 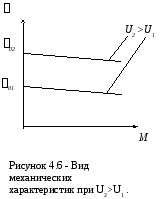 Угловая скорость вращения холостого хода пропорциональна напряжению (ω0=U/cеФ), а изменение скорости (Δω=Iя Rя/сеФ) от напряжения не зависит. Поэтому механические характеристики двигателя при изменении напряжения Рисунок4.6. не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу. Изменением напряжения управления цепи якоря можно регулировать скорость вращения вниз от номинальной, поскольку недопустима подача напряжения выше номинального значения. При необходимости увеличения скорости вращения выше н
Угловая скорость вращения холостого хода пропорциональна напряжению (ω0=U/cеФ), а изменение скорости (Δω=Iя Rя/сеФ) от напряжения не зависит. Поэтому механические характеристики двигателя при изменении напряжения Рисунок4.6. не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу. Изменением напряжения управления цепи якоря можно регулировать скорость вращения вниз от номинальной, поскольку недопустима подача напряжения выше номинального значения. При необходимости увеличения скорости вращения выше н оминальной, можно воспользоваться изменением тока возбуждения двигателя. Практическая реализация данного способа регулирования скорости сводится к применению регулируемого источника напряжения. Например, для управления двигателями малой и средней мощности в качестве такого источника можно применять регулируемый выпрямитель Рисунок4.7, в котором напряжение постоянного тока меняется регулировочным автотрансформатором(АТ), включенным на входе выпрямителя. Изменение направления вращения Для того чтобы изменить направление вращения (выполнить реверс) нужно поменять знак электромагнитного момента на противоположный. Это возможно осуществить двумя способами:
оминальной, можно воспользоваться изменением тока возбуждения двигателя. Практическая реализация данного способа регулирования скорости сводится к применению регулируемого источника напряжения. Например, для управления двигателями малой и средней мощности в качестве такого источника можно применять регулируемый выпрямитель Рисунок4.7, в котором напряжение постоянного тока меняется регулировочным автотрансформатором(АТ), включенным на входе выпрямителя. Изменение направления вращения Для того чтобы изменить направление вращения (выполнить реверс) нужно поменять знак электромагнитного момента на противоположный. Это возможно осуществить двумя способами:
- Изменением направления тока якоря.
- Изменением направления магнитного потока, т.е. тока возбуждения.
Практически это делается изменением полярности напряжения, подаваемого на обмотки.
Направление вращения якоря электродвигателя зависит от направления тока в обмотке якоря. На электрифицированной ж/д верхний
Пожалуйста, войдите или зарегистрируйтесь для публикации ответа на этот вопрос.
решение вопроса
Связанных вопросов не найдено
Обучайтесь и развивайтесь всесторонне вместе с нами, делитесь знаниями и накопленным опытом, расширяйте границы знаний и ваших умений.
поделиться знаниями или
запомнить страничку
- Все категории
- экономические 43,679
- гуманитарные 33,657
- юридические 17,917
- школьный раздел 612,652
- разное 16,911
Популярное на сайте:
Как быстро выучить стихотворение наизусть? Запоминание стихов является стандартным заданием во многих школах.
Как научится читать по диагонали? Скорость чтения зависит от скорости восприятия каждого отдельного слова в тексте.
Как быстро и эффективно исправить почерк? Люди часто предполагают, что каллиграфия и почерк являются синонимами, но это не так.
Как научится говорить грамотно и правильно? Общение на хорошем, уверенном и естественном русском языке является достижимой целью.
- Обратная связь
- Правила сайта
3.4. Характеристики двигателей постоянного тока
Обычно рассматривают три основные характеристики двигателей постоянного тока:
- скоростную характеристику,
- характеристику момента,
- механическую характеристику.
Все характеристики, отражающие взаимосвязь между током якоря, механическим моментом на валу двигателя и частотой вращения якоря зависят от способа возбуждения двигателя, поэтому они рассматриваются отдельно для каждой схемы возбуждения двигателя.
3.4.1. Характеристики двигателей с независимым и параллельным возбуждением
Скоростной характеристикой называют зависимость частоты вращения якоря от тока якоря двигателя при постоянном напряжении питания U = const, равном номинальному напряжению, и постоянном токе возбуждения Iв = const.
Для получения функциональной зависимости скорости вращения якоря от тока воспользуемся уравнением электрического равновесия двигателя
Из этого уравнения получаем выражение для частоты вращения
В полученной формуле от тока якоря зависят две составляющие: произведение Rя Iя и результирующий магнитный поток машины .

Произведение RяIя, равное падению напряжения на сопротивлении цепи якоря, приводит к пропорциональному уменьшению частоты вращения при увеличении тока якоря. Магнитный поток машины при увеличении тока якоря из-за реакции якоря несколько уменьшается. Эта зависимость магнитного потока от тока якоря нелинейная, поэтому и скоростная характеристика двигателей с независимым и параллельным возбуждением нелинейная (рис. 3.4).
В зависимости от соотношения влияния на частоту вращения падения напряжения Rя Iя и изменения магнитного потока двигателя характеристика скорости может иметь различный вид. На рис. 3.4 кривая 1 представляет собой характеристику скорости двигателя, у которого влияние Rя Iя преобладает перед влиянием потока , кривая 3 представляет собой скоростную характеристику двигателя, у которого влияние потока преобладает перед влиянием падения напряжения на сопротивлении цепи якоря Rя Iя .
Чаще всего встречаются двигатели, у которых уменьшение частоты вращения за счет падения напряжения на сопротивлении цепи якоря преобладает перед влиянием реакции якоря, приводящей к уменьшению магнитного потока.
Характеристикой момента называют зависимость механического момента на валу двигателя от тока якоря при постоянном номинальном напряжении питания U = Uн = const и при постоянном номинальном токе возбуждения Iв= Iвн = const.
Ток якоря ненагруженного двигателя не равен нулю. Это объясняется наличием потерь в двигателе, работающем без нагрузки. Такой ток называется током холостого хода Iяо двигателя.
Используя ранее полученную формулу для определения механического момента на валу двигателя, получаем для двигателя, работающего в режиме холостого хода, формулу: .
Нагруженный двигатель при токе якоря Iя развивает механический момент . Этот развиваемый момент называют электромагнитным.
Механический момент на выходе двигателя равен разности электромагнитного момента и момента холостого хода .

При неизменной величине магнитного потока зависимости и являются прямыми линиями. Однако магнитный поток машины несколько уменьшается при увеличении тока якоря Iя из-за реакции якоря, поэтому характеристики и не являются прямолинейными (рис. 3.5). Максимальное значение тока якоря, при котором якорь ненагруженного двигателя (М2 = 0) начинает вращаться, называют током трогания. Электромагнитный момент в этом случае равен моменту холостого хода.
Особый интерес представляет график зависимости КПД машины от тока якоря (см. рис. 3.5). КПД равен нулю при токах, меньших тока холостого хода или тока трогания (М2 = 0 и Р2 = 0). При дальнейшем увеличении тока КПД увеличивается и достигает максимального значения при токе якоря, равном примерно 0,75Iян. При больших токах КПД начинает уменьшаться. КПД двигате- лей средней и большой мощности при номинальном токе достига-ет 85 – 95 %.
Основной характеристикой двигателя постоянного тока является механическая характеристика.
Механической характеристикой называют зависимость частоты вращения якоря n от механического момента на валу двигате- ля M2 при постоянном напряжении питания и постоянном токе возбуждения, т. е. . В дальнейших рассуждениях будем предполагать, что электромагнитный момент равен механическому моменту на выходе двигателя .
Особую роль играет механическая характеристика двигателя при номинальном напряжении питающей сети U = Uн = const и номинальном токе возбуждения Iв = Iвн = const. Такую механическую характеристику называют естественной. Рассматривают и другие механические характеристики, выражающие ту же зависимость , но при других условиях работы, т. е. при других значениях напряжения, при других токах возбуждения и при различных сопротивлениях реостатов, включенных последовательно с якорем. Такие механические характеристики называют искусственными.
Найдем аналитическое уравнение, описывающее механическую характеристику.
В уравнении электрического равновесия . ПротивоЭДС обмотки якоря . Следовательно, = . Из полученного уравнения . Но из уравнения для определения момента и . Тогда .
Обозначим и . Можно написать .
Полученное уравнение является уравнением прямой линии.
Уравнение состоит из двух слагаемых. Первое слагаемое не зависит от момента, а второе слагаемое прямо пропорционально механическому моменту М.
Очевидно то, что механическая характеристика (рис. 3.6) двигателя постоянного тока выражается прямой линией. Такую прямую можно провести через две точки, положение которых на графике можно найти следующим образом: в режиме идеального холостого хода момент двигателя равен нулю , и якорь вращается с частотой , а при номинальном напряжении .
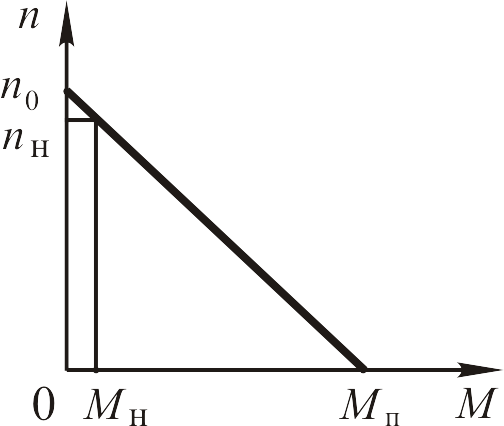
Это первая точка механической характеристики. Положение другой точки определяется из условий пуска двигателя. При подключении двигателя в сеть в начальный момент времени из-за инерционности якоря частота вращения равна нулю n= 0. Противо-ЭДС обмотки якоря тоже равна нулю, и тогда приложенное напряжение падает только на сопротивлении якорной цепи. Ток якоря в этом случае достигает больших величин из-за малости Rя. Его называют пусковым током Iяп. Сила пускового тока определяется из уравнения .
Механический момент, развиваемый двигателем, в этом случае называют пусковым моментом Мп , и его величина определяется формулой
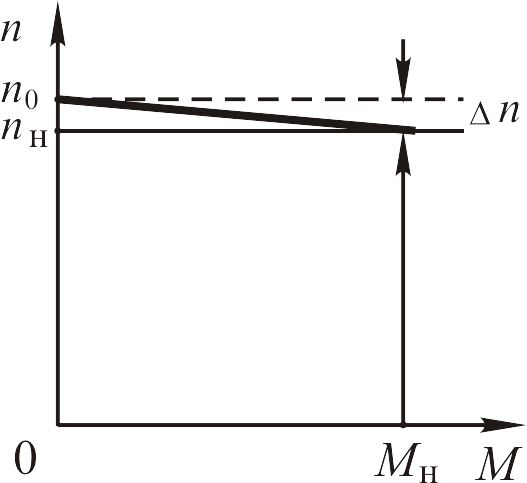
Общий вид естественной механической характеристики показан на рис. 3.7.
Двигатели с параллельным возбуждением имеют пусковой момент в 10…20 раз больше номинального, поэтому рабочая часть механической характеристики, ограниченная режимом холостого хода (М = 0) и номинальным значением момента на валу , занимает лишь начальную часть полной характеристики (см. рис. 3.6), в пределах которой частота вращения изменяется незначительно. Такая механическая характеристика, когда при изменении механического момента от нулевого значения до номинального значения частота вращения изменяется незначительно, называется жесткой (см. рис. 3.7). Величина весьма невелика.