3. Гироскопы и их свойства Принцип действия стабилизаторов 2э42-2 и 2э36-1 и их блокировки – 15 мин.
Гироскопом, в самом общем, в широком смысле слова называется тяжелое, симметричное, вращающееся тело, ось вращения которого может изменять свое направление.
Гироскопом, в более узком, техническом, смысле слова называется вполне определенный прибор, представляющий собой быстро вращающийся маховик (ротор), установленный в одной или двух рамках.
Применяемые в танках гироскопы по конструкции подразделяются на:
двухстепенные (имеющие одну подвижную рамку);
трехстепенные (имеющие две подвижные рамки).
Пока ротор гироскопа не приведен во вращательное движение, прибор не обладает никакими особыми свойствами. Однако стоит только заставить вращаться ротор, как у гироскопа появляются особые, присущие только ему свойства.
Первое свойство — гироскопическая устойчивость, т.е. стремление сохранить неизменное положение оси ротора в пространстве.
Второе свойство — гироскопический эффект, т.е. способность сопротивляться внешним силам, стремящимся отклонить главную ось гироскопа от занимаемого ею положения в пространстве. Так если к внутренней рамке приложить внешнюю силу, то отклоняться будет не внутренняя, а наружная рамка. Такое движение главной оси гироскопа под действием внешней силы называется прецессионным движением или прецессией.
Из теории гироскопа известно, что чем больше масса ротора и скорость его вращения, тем больше его устойчивость. Кроме того, если время воздействия на ротор внешней силы очень мало (например, удар), то гироскоп не будет прецессировать и направление всех его осей в пространстве останется неизменным. Благодаря именно этому его свойству гироскоп не чувствителен к толчкам и ударам и сотрясениям при стрельбе из пушки.
Принцип работы стабилизатора 2Э42-2
Принцип работы электрогидравлических приводов стабилизации и наведения в вертикальной и горизонтальной плоскостях одинаков. Он состоит в том, что стабилизированная пушка при движении танка по пересеченной местности сохраняет заданное наводчиком положение в пространстве, в то время как корпус танка совершает во время его движения колебания в вертикальной и горизонтальной плоскостях.
Положение пушки в пространстве, угол возвышения в вертикальной и угол поворота башни в горизонтальной плоскостях изменяются наводчиком поворотом рукояток пульта управления прицела. Скорость подъема (опускания) пушки и поворота башни тем больше, чем больше отклонение рукояток или корпуса от нейтрального положения.
Принцип работы стабилизатора 2Э36-1
Принцип работы привода ВН одинаков для режимов АВТОМАТ и ПОЛУАВТОМАТ. Он основан на том, что при движении машины башня вместе с корпусом под действием внешних сил отклоняется от исходного положения, увлекая за собой пушку.
Вместе с пушкой отклоняется ГТ-ВН, который вырабатывает сигнал, пропорциональный величине скорости и соответствующий (по фазе) направлению отклонения пушки в вертикальной плоскости. Сигнал обрабатывается электрической схемой и поступает на обмотку якоря электродвигателя подъемного механизма, который поворачивает пушку в сторону, противоположную отклонению корпусу машины, удерживая ее в направлении на цель с точностью до величины ошибки стабилизации.
Наведение спаренной установки в вертикальной плоскости осуществляется с помощью пульта управления. Сигнал с пульта управления обрабатывается электрической схемой, и после усиления и преобразования поступает на электродвигатель подъемного механизма, который поворачивает спаренную установку в направлении и со скоростью в соответствии со знаком и величиной сигнала с пульта управления.
Принцип действия привода ГН при стабилизации и наведении аналогичен принципу действия приводу ВН. Отличие от привода ВН состоит в обработке сигнала электрической схемой.
Гиротахометр стабилизатора измеряет только угловую скорость перемещения спаренной установки относительно поверхности земли, поэтому линейные перемещения машины, а соответственно и спаренной установки относительно цели необходимо компенсировать наведением спаренной установки на цель.
Блокировки стабилизатора 2Э42-2
Для обеспечения безопасной работы экипажа и нормальной работы стабилизатора предусмотрен ряд блокировок.
Привод ГН отключается:
при застопоренной башне – для предотвращения перегрузки привода ГН (датчик блокировки расположен около рукоятки стопора башни);
при открытом люке механика-водителя – во избежание травмирования механика-водителя пушкой при развороте башни (датчик блокировки расположен на наружном стакане закрывающего механизма люка механика-водителя);
при включении переключателя 4 АВТ.-РУЧ. (рис. 15) на пульте управления в положение РУЧ. или переключателя 10 АВТ.-РУЧ. РАЗГР. (рис. 16) на пульте загрузки автомата заряжания в положение РУЧ. РАЗГР.
Рис. 15. Пульт управления автомата заряжания
1-переключатель типов; 2,3-сигнальные лампы; 4-переключатель; 5-пробка (регулировочная) потенциометра; 6-кнопка
Рис. 16. Пульт загрузки автомата заряжания
1, 4-кнопки; 2, 3, 9-сигнальные лампы; 5, 6, 8, 10-переключатели; 7-крышка АВАРИЙНО (крышка необходима для предотвращения от случайного нажатия на кнопку СТОПОР и переключатели ПОДДОН, РАМКА ВЫБРОС-ИСХОД, ДОС)
В приводе ВН предусмотрено гидростопорение пушки на башню в следующих случаях:
после выстрела на время «откат-накат»;
при отскоке пушки от упоров башни с угловой скоростью более 7,0-8,5 °/с в целях исключения многократных соударений пушки с упором;
при неулавливании поддона ловушкой;
при неполностью опущенных рамке механизма удаления поддона и захвате механизма подъема кассет;
при застопоривании пушки электромашинным стопором;
при включении переключателя 4 АВТ.-РУЧ. (рис. 14) на пульте управления в положение РУЧ. или переключателя 10 АВТ.-РУЧ. РАЗГР. (рис. 15) на пульте загрузки автомата заряжания в положение РУЧ. РАЗГР., а также при включении переключателя 1 типа выстрелов (рис. 14) на пульте управления в положение ЗАГР., при этом пушка приводится в зону ±1,5° от угла заряжания в режиме «автомат».
Кроме того, в приводе ВН осуществляется торможение пушки при ее движении сверху вниз со скоростью более 7,0–8,5 °/с.
Блокировки стабилизатора 2Э36-1
На машине предусмотрены следующие блокировки стабилизатора:
при открытых люках механика-водителя или десанта;
при включении выключателя ПТР (рис. 17 поз. 6), который предназначен для включения цепей пуска ПТУР и одновременного отключения стабилизатора;
Рис. 17. Блок БУ-25-2С с коробкой КР-25:
1, 10-предохранители; 2-сигнальные лампы СПУСКИ ГОТОВ (СПУСКИ ВКЛ, и ГОТОВ 2А42); 3, 6, 8, 12-выключатели; 4-лампы подсветки панели; 5-крышка 7, 9-лампы сигнальные; 11-коробка КР-25; 13-табло сигнальное; 14-ручка потенциометра регулировки яркости; 15, 16-кнопки; 17, 18-переключатели; 19-крышка предохранителей
при подаче команды ПАЗ (при срабатывании системы коллективной защиты);
при установки пушки или башни на стопор.
При открытом люке, подаче команды ПАЗ или включении ПТР отключаются электромагниты подъемного и поворотного механизмов, при этом приводы ВН и ГН переключаются на ручное управление.
При установке пушки на стопор отключается электромагнит подъемного механизма, управление приводом ВН исключается, управление приводом ГН сохраняется.
При установке башни на стопор отключаются электромагнит поворотного механизма и управление приводом ГН, управление приводом ВН сохраняется.
Старший преподаватель подполковник С.В. Юрко
Лекция № 17 (фопи)
Гироскопические приборы бывают механические, вибрационные или волновые твердотельные, шаровые или электростатические, магнитодинамические или гидродинамические, лазерные и волоконно-оптические. Наиболее распространенными являются механические гироскопические приборы, а наиболее перспективными и быстро развивающимися в последнее время— волоконно-оптические гироскопические устройства, описанные в § 2.12. Ориентация предмета в пространстве невозможна без устройства, обеспечивающего начало отсчета от какой-то постоянно существующей системы координат. Роль такого устройства при измерении углов и угловых скоростей выполняют гироскопические чувствительные элементы, а именно трехстепенные или двухстепенные гироскопы.
Ориентация предмета в пространстве невозможна без устройства, обеспечивающего начало отсчета от какой-то постоянно существующей системы координат. Роль такого устройства при измерении углов и угловых скоростей выполняют гироскопические чувствительные элементы, а именно трехстепенные или двухстепенные гироскопы [48, 49].
Трехстепенные гироскопы
Общие сведения. Гироскоп — массивный точно сбалансированный маховик (ротор гироскопа), вращающийся с большой угловой скоростью и представляющий собой симметричное тело с одной неподвижной точкой, являющейся его центром тяжести. Такое закрепление гироскопа осуществляется при помощи карданова подвеса (рис. 2.51), т.е. крепление ротора во внутренней 2 и внешней 3 рамках, оси вращения которых взаимоперпендикулярны и одновременно перпендикулярны оси ротора гироскопа 1.
Если центр масс гироскопа совпадает с точкой опоры, то такой гироскоп называют уравновешенным или астатическим с тремя степенями свободы. Обозначим ось симметрии ротора гироскопа z—z ,ось внутренней рамки x—x, ось внешней рамки y—y. Как видно из рис. 2.51, трехстепенной гироскоп может вращаться вокруг всех трех осей. Однако частоты вращения ω x — ω y ничтожны по величине в сравнении с ωz = Ω, где Ω — частота вращения ротора, поэтому главный момент количества движения гироскопа практически совпадает с моментом количества движения ротора гироскопа как по величине, так и по направлению, т.е. M=J Ω=H, где H — кинетический момент ротора гироскопа; J— момент инерции ротора относительно оси y—y.
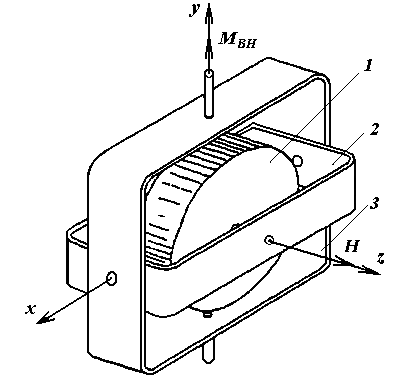
Рис.2.51. Гироскоп в кардановом подвесе
Направление вектора кинетического момента гироскопа совпадает с направлением вектора угловой скорости П ротора, т.е. совпадает с осью z—z.
Для трехстепенного гироскопа характерно следующее явление: при приложении по оси y—y внешнего момента MBH возникает вращение вектора H кинетического момента вокруг оси x—x. Вследствие этого внутренняя рамка 2 гироскопа поворачивается относительно внешней рамки 8. То же самое происходит при приложении внешнего момента по оси x—x, только вращение вектора H будет происходить вокруг оси y—y. Это явление называется прецессией гироскопа.
Угловая скорость прецессии ω = MBH/H = MBH/JΩ .
Если внешнее воздействие имеет импульсный характер, то в трехстепенном гироскопе внутренняя рамка начинает совершать периодические колебательные движения, причем амплитуда этих колебаний обратно пропорциональна скорости вращения ротора. Такие колебания называются нутационными. Частота нутационных колебаний определяется выражением
Чем выше величина Ω, тем больше частота нутационных колебаний и меньше их амплитуда.
При отсутствии трения в осях подвеса гироскопа эти колебания будут незатухающими, а при наличии трения колебательный процесс будет затухать.
В инженерной практике используется только прецессионное движение гироскопа.
Из приведенных выше формул видно, что прецессия будет совершаться только при наличии внешнего момента MBH(если MBH=0, то ω =0 ).
Из этой же формулы следует, что скорость прецессии мала, так как кинетический момент гироскопа Н, как правило, велик (велика частота вращения ротора).
Быстро вращающийся ротор придает трехстепенному гироскопу свойство большой инерционности, т.е. стремление сохранять неизменным направление оси вращения ротора в пространстве.
Итак, с точностью до инструментальных погрешностей ось собственного вращения ротора гироскопа сохраняет заданное направление в инерциальном пространстве и служит «базой» для определения углового положения объекта (летательного аппарата, стабилизированной платформы, пеленгатора и т.п.) в принятой системе координат.
Каждый трехстепенной гироскоп позволяет определять две угловые координаты, а с помощью двух гироскопов можно получить все три координаты объекта, имея избыточные данные об одной из них.
Свободные гироскопы широко применяются в системах ориентации летательных аппаратов кратковременного (без коррекции) и долговременного (с введением коррекции) действия и в качестве чувствительных элементов ги-ростабилизаторов.
Для измерения углов поворота основания относительно осей подвеса гироскопа используются различного типа датчики угла (потенциометрические, индуктивные, трансформаторные и др.), установленные на осях подвеса гироскопа.
В гироскопах с коррекцией используются моментные датчики (обратные преобразователи величины постоянного тока во вращающийся момент), позволяющие создавать необходимые корректирующие или ориентирующие моменты на осях рамок.
В конструкции гироскопа также предусматривается арретирующее устройство, позволяющее осуществлять начальную выставку оси ротора прибора относительно корпуса и предохранять подвижную систему (собственно гироскоп) от ударов по упорам при транспортировании.
Далее приводится краткое описание гироскопических приборов (измерителей угловых перемещений), выполненных на основе трехстепенного гироскопа.
Свободный гироскоп с одним датчиком угла. Данный гироскоп выполнен в классическом варианте и представляет собой некорректируемый трехстепенной астатический гироскоп в кардановом подвесе.
В его конструкции предусмотрено многоразовое арретирующее устройство, позволяющее выполнять начальную выставку оси ротора прибора относительно корпуса, и имеется один датчик угла Этот прибор может быть эффективно использован в качестве курсового гироскопа в простейшей системе ориентации при перемещении объекта на небольшие расстояния.
Блок свободных гироскопов. Прибор состоит из основания, на котором смонтированы два свободных гироскопа так, что оси их собственного вращения взаимоперпендикулярны. Каждый гироскоп снабжен своим арретирующим устройством, позволяющим производить начальную выставку осей собственного вращения гироскопа относительно корпуса, и двумя датчиками угла.
Этот прибор может служить в качестве системы ориентации кратковременного действия и позволяет определять все три угла отклонения объекта относительно базовой системы координат.
Гироскопы данного прибора выполнены в классическом варианте, то есть представляют собой трехстепенные некорректируемые астатические гироскопы в кардановом подвесе.
Гироскоп трехстепенной управляющий. Это гироскоп, выполненный в классическом варианте, т.е. трехстепенной астатический гироскоп в карда-новом подвесе.
В его конструкции имеются два индуктивных датчика угла для измерения углов поворота основания прибора относительно осей подвеса гироскопа, и, кроме того, для коррекции измеряемых углов вводятся два магнитоэлектрических моментных датчика, которые также позволяют выполнять начальную выставку оси собственного вращения гироскопа относительно корпуса прибора (по сигналам с датчиков угла) или относительно базовой системы координат (по сигналам от внешних датчиков рассогласования направления оси ротора прибора и соответствующей оси базовой системы координат) Этот прибор эффективно используется в качестве датчика углов крена и тангажа без коррекции в системах ориентации кратковременного действия, или с введением коррекции от ЭВМ в системах коррекции долговременного действия, а также в качестве чувствительного элемента гиростабилизаторов.
Гироскоп поплавковый астатический. Основной причиной возникновения ошибок в гироскопических приборах является наличие моментов трения в осях подвеса. В данном приборе для уменьшения моментов трения используется выталкивающая сила жидкости и газа.
Гироузел данного гироскопа представляет собой ротор, установленный при помощи газового универсального подшипника в герметичном корпусе, заполненном гелием. При раскручивании ротора газ увлекается поверхностью внутренней сферы (ротора) и нагнетается в зазор между шариком подшипника и сферой. Давление в зазоре повышается и отделяет сферу от шарика, что значительно снижает момент трения.
Гироузел при помощи подшипников из полудрагоценных камней (часового типа) подвешен в кардановом кольце, которое установлено в сферическом корпусе. Все пространство между гироузлом и корпусом заполнено жидкостью с такой плотностью, что гироузел находится в ней в состоянии безразличного равновесия. В таких условиях элементы карданова подвеса практически не нагружают подшипники осей, т.е. функция подшипников сводится к центровке поплавкового гироузла. Кроме того, выбор материала подшипника (агат, рубин, корунд) обусловлен тем, что трущаяся пара стальной керн — каменный подшипник (искусственный рубин, агат) имеет при прочих равных условиях наименьший момент трения, чем любая другая пара материалов. Моменты трения в осях подвеса в таком приборе безусловно малы.
Наличие жидкости в конструкции гироскопа приводит к необходимости введения в прибор системы термостабилизации (обогрева) для обеспечения равномерного прогрева жидкости и сильфона, предназначенного для компенсации ее температурного расширения. Равномерность температуры и давления жидкости, а также их неизменность необходимы для точной работы прибора.
Для измерения углов поворота основания относительно осей подвеса гироскопа используются индуктивные датчики угла.
Для создания корректирующих или ориентирующих моментов относительно осей подвеса в гироскопе устанавливаются магнитоэлектрические датчики момента.
Наличие двух датчиков угла и двух моментных датчиков позволяет использовать этот прибор в качестве гировертикали, курсового гироскопа или в качестве гироорбитанта при введении соответствующей коррекции.
В некоторых поплавковых гироскопах имеется также система стабилизации оси гироузла. Такие приборы чаще всего используются в качестве чувствительных элементов гиростабилизаторов.
Вибрационный гироскоп. Принцип действия данного гироскопа основан на способности вращающегося упругого диска посредством гироскопического момента, возникающего из-за переносной угловой скорости вращения основания, отклоняться от плоскости своего первоначального вращения (при woch = 0), т.е. от плоскости, перпендикулярной валу, вращающему диск, на угол, пропорциональный величине угловой скорости вращения основания.
Принципиальная схема прибора приведена на рис. 2.52. Ротор 1 данного гироскопа представляет собой металлическое кольцо, соединенное с вращающим его валом 4 синхронного гистерезисного двигателя 3 упругим подвесом, выполненным в виде кардана Гука. Кардан Гука представляет собой внутренний кардановый подвес, состоящий из двух одинаковых рамок 2 и упругих элементов — торсионов 5, посредством которых рамки соединяются с валом двигателя и ротором. Особенностью торсионов является то, что они обладают большим упругим сопротивлением на изгиб и малым упругим сопротивлением на скручивание. Оси соединения отдельной рамки с валом двигателя и ротором взаимоперпендикулярны .

Рис. 2.52. Принципиальная схема вибрационного гироскопа.
Для эффективной работы таких гироскопов элементы его конструкции (ротор, торсионы и рамки), а также угловая скорость вращения двигателя подбираются таким образом, чтобы был реализован принцип динамической настройки, т.е. чтобы собственная нутационная частота гироскопа совпадала с частотой вращения ротора.
При отклонении ротора гироскопа от плоскости, перпендикулярной валу, со стороны кардана Гука на ротор начинают действовать два противоположно направленных пропорциональных углу отклонения ротора момента: упругий момент сопротивления отклонению и динамический опрокидывающий момент.
Условие взаимной компенсации этих моментов и представляет собой, условие динамической настройки.
При динамической настройке кардан Гука приобретает свойства, близкие к свойствам безмоментного шарнира, что обуславливает очень малые погрешности измерения, углов.
В конструкцию прибора входят также два индуктивных датчика углов 6 и два магнитоэлектрических датчика момента 7, а также система термостатирования, включающая термочувствительную катушку и обмотку обогрева, расположенные на корпусе прибора.
Такие гироскопы широко применяются в качестве чувствительных элементов гиростабилизаторов и могут применяться как датчики угловых отклонений объекта относительно заданной системы координат в системах ориентации.
Инструкция
Гальваническая развязка: назначение и методы Гальваническая развязка (изоляция), обычно называемая просто развязкой, является способом, в соответствии с которым отдельные части электрической системы могут обладать различными… Подробнее » Что такое гальваническая развязка
Что такое групповой электропривод
- автор: admin
- 27.07.2023
1.3 Классификация электроприводов 1. По соотношению числа электродвигателей и исполнительных органов рабочей машины можно выделить групповой, индивидуальный и взаимосвязанный. Групповой электропривод обеспечивает движение исполнительных органов… Подробнее » Что такое групповой электропривод
Что такое волновой процесс
- автор: admin
- 27.07.2023
1.1. Понятие волнового процесса Волновым процессом называется любое изменение (возмущение) состояния сплошной среды, распространяющееся с конечной скоростью и несущее энергию. Существует большое многообразие волновых процессов… Подробнее » Что такое волновой процесс
Россия в зеркалах лазерных гироскопов

На форуме «Армия-2020» впервые были представлены снаряды для реактивной системы залпового огня «Торнадо-С». 300-мм управляемый реактивный снаряд сочетает в себе огневую мощь и высокую точность поражения. Благодаря чему удалось превратить оружие для поражения площадных целей в средство уничтожения точечных целей? «Армейский стандарт» изучил вопрос.
«Каждому из снарядов можно задать индивидуальные параметры не только по дальности полета, но и по траектории для разведения их по различным целям. Точность стрельбы снарядов «Торнадо-С» в 15–20 раз выше, чем у снарядов реактивной системы залпового огня (РСЗО) предыдущего поколения «Смерч», — рассказал журналистам генеральный директор холдинга «Технодинамика» Игорь Насенков.
Раскроем секрет его необычайной точности поражения малоразмерной цели: индивидуальное полетное задание для каждого снаряда закладывается в блок управления, созданного на основе БИНС — бесплатформенной инерциальной навигационной системы.
Этот прибор появился в армии и на флоте относительно недавно и быстро завоевал, если можно так выразиться, популярность у всех представителей видов Вооруженных сил и родов войск. С его помощью с высокой точностью определяются координаты подвижного объекта — будь то снаряд, атомная подводная лодка на глубине или самолет высоко в небе.
Ранее на службе у летчиков и моряков были только спутниковые навигационные системы: российская ГЛОНАСС, американская GPS, европейская Galileo, китайская «Бэйдоу», индийская региональная система IRNSS и японская «Квазизенитная спутниковая система» — QZSS.
Наконец, у всех есть астронавигация — самая надежная система ориентации по звездам.
Но для военных этого мало. Им важно знать точные координаты подвижного объекта и быть уверенными, что доступ к источнику координат будет постоянным, непрерывным и ни от кого не зависимым. Спутниковые системы навигации такой гарантии не дают.
ГЛОНАСС и GPS передают навигационный сигнал в двух режимах: открытом и закрытом. Но, как говорится, против лома нет приема. В наших батальонах и полках радиоэлектронной борьбы (РЭБ) есть штатные станции подавления GPS, которые генерируют «убийственную» помеху мощностью более 20 дБ. «Потенциальный партнер» обладает аналогичными станциями. Одним словом, современными средствами радиоэлектронной борьбы противник может спутниковый сигнал исказить, «зашумить», отключить, в конце концов, уничтожить сам спутник.
Теперь у российских военных появилась палочка-выручалочка. И новая установка — на любом объекте должна быть автономная инерциальная навигационная система (ИНС), независимая от капризов погоды, от спутников и средств РЭБ. Именно такой системой является БИНС.
Следуя за лазерным лучом
Инерциальные навигационные системы во второй половине прошлого века потребовались в первую очередь подводникам-атомщикам. Сначала экипажи субмарин определяли свое положение в Мировом океане с помощью системы астронавигации. Но для этого приходилось подвсплывать на перископную глубину, что вело к потери скрытности автономного плавания.
Специально для подводников разработали инерциальные навигационные системы платформенного типа на базе электромеханических гироскопов и акселерометров в кардановом подвесе.
В конце прошлого века российские конструкторы с гордостью рассказывали мне, что им удалось снизить вес такого прибора до 27 кг, в то время как американский весил 5 кг.
Дальнейшее развитие науки и техники позволило передовым странам, в число которых входит Россия, создать качественно новые инерциальные навигационные системы — бесплатформенные, в которых нет подвижных деталей и электромоторов. Сам гироскоп из электромеханической «юлы» превратился в электровакуумный прибор, который олицетворяет собой настоящую квинтэссенцию передовых технологий на стыке нескольких областей знаний: материаловедения, электроники и кибернетики.
В БИНС реализованы высокие технологи из нескольких областей науки и техники: оптика, электроника, вакуумная обработка, прецизионное полирование. Устройства характеризуются высоким классом точности и чистоты обработки оптических деталей, сложными вакуумными процессами, специальными видами испытаний.
Гироскопы подразделяются на лазерные, волоконно-оптические, волновые твердотельные и микромеханические. Есть и другие типы гироскопов, которые еще не достигли технологического совершенства и не используются индустриально, например, сверхвысокочастотные (СВЧ), ядерные магнитно-резонансные и гироскопы на холодных атомах.
Сложно ответить однозначно на вопрос: какой из них лучше? Каждый по-своему хорош, если отвечает требованиям потребителя к точности навигационной информации. Среди точных и высокоточных БИНС наиболее востребованными в российских Вооруженных силах оказались лазерные.
Современные БИНС на лазерных гироскопах и кварцевых акселерометрах — одно из самых сложных и высокотехнологичных изделий авиакосмической промышленности. Они стали незаменимым автономным средством навигации межвидового применения.
Большой круг потребителей в армии, авиации и на флоте ценят их за автономность, помехоустойчивость, непрерывное и глобальное функционирование в любое время дня и ночи, зимой и летом, в воздухе, на земле и под водой. Без них не решают задачи навигации, управления полетом, прицеливания, подготовки и наведения ракет, а также обеспечения работоспособности инфракрасных, радиолокационных и оптикоэлектронных бортовых систем. На магистральных самолетах коммерческой авиации автономные инерциальные системы являются основным средством навигации и определения пространственного положения воздушного судна.
В мире всего четыре страны освоили сложное производство этих систем: Россия, Китай, США и Франция. При этом речь идет не об одном, а о целой линейке приборов, для каждого вида Вооруженных сил — свой БИНС.
Разработкой БИНС, например, авиационного применения в России занимаются пять организаций. Системы навигации, основанные на лазерных гироскопах и кварцевых акселерометрах, входят в состав комплексов бортового оборудования современных и перспективных самолетов гражданского и военного назначения.
Принцип действия лазерного гироскопа заключается в том, что внутри замкнутого по периметру пространства, образованного системой зеркал и корпусом, изготовленным из специального стекла, возбуждаются два лазерных луча. Когда гироскоп находится в состоянии покоя, два луча «бегут» навстречу друг другу с одинаковой частотой, а когда прибор начинает совершать угловое движение, то каждый из лучей изменяет свою частоту в зависимости от направления и скорости этого движения. Через одно из зеркал выводится часть энергии лучей и формируется интерференционная картина.
Фотоприемник считывает информацию об угловом движении гироскопа, определяет направление вращения по направлению движения интерференционной картины и величину угловой скорости по скорости ее движения. После этого он преобразует оптический сигнал в очень маломощный электрический, дальше начинаются процессы его усиления, фильтрации и отделения помех.
БИНС состоит из трех одноосных гироскопов. Каждый из них измеряет угловую скорость, действующую вдоль его оси чувствительности, которая перпендикулярна плоскости распространения лазерных лучей. Три измерителя ускорения — акселерометры — передают информацию о линейном движении объекта.
Акселерометры — это очень точные приборы, в которых на упругом подвесе в виде маятника размещена так называемая пробная масса. Современные акселерометры осуществляют измерения с точностью до одной стотысячной доли ускорения свободного падения.
БИНС различаются по трем классам точности в соответствии с принятым в России ГОСТом. Первый класс точности — это невязка координат в пределах 0,5 морской мили после часа полета, иными словами, это накопление ошибки в определении местоположения объекта через час его перемещения.
Чаще всего используются системы второго и третьего классов точности, а системы первого класса имеют более узкий круг применения на объектах специального назначения, но еще не наступило время раскрывать все секреты.

С точностью одного ангстрема
Промышленность пока удовлетворяет потребности в БИНС Минобороны, Минтранса и других ведомств. Но с развитием научно-технического прогресса спрос на автономные инерциальные системы будет только расти. Поэтому пора заранее задуматься о расширении производства, ведь речь идет о высокотехнологичных изделиях, изготовление которых сопряжено с немалыми трудностями.
Например, шероховатость поверхности зеркала при финишной полировке должна быть на уровне 1 ангстрема (0,1 нанометра). Величины, в 100 тысяч раз меньше толщины человеческого волоса. То есть это уже почти молекулярный уровень.
В гироскопах устанавливают зеркала двух типов: плоские и сферические. Диаметр одного может быть 5 мм, а другого — в тысячу раз больше. Дух захватывает от одной мысли, как из тысячи сферических зеркал составить одно большое диаметром 5 метров. При этом сферичность каждого «пятачка» должна быть частью 5-метровой сферы.
Но и это еще не все. В нашем представлении зеркало — что-то простое, однородное, как хорошо отполированная пластина серебра. В гироскопе зеркало представляет собой специальное многослойное покрытие. Оно одновременно должно идеально отражать лазерный луч с минимизацией потерь и вместе с тем обладать пропускной способностью.
Зеркальное покрытие наносится методом ионного напыления на специальный стеклокристаллический материал — ситалл. Каждый из слоев имеет толщину порядка 100 нанометров, в зависимости от материала.
Коэффициент отражения зеркала определяется количеством напыляемых слоев и регулируется необходимой величиной пропускаемой оптической энергии. Качественное зеркало должно рассеивать и поглощать не более десяти из миллиона частей отраженного лазерного излучения.
Лазерный луч распространяется в гелий-неоновой газовой среде низкого давления. Ее характеристики должны оставаться неизменными на протяжении всего срока эксплуатации гироскопа. Попадание в газовую среду даже ничтожного количества примесей приводит сначала к изменению характеристик гироскопа, а затем — к его отказу.
На гироскопе размещаются электроды, на которые подается напряжение порядка 2 кВ. Для сравнения: контактная сеть на электрифицированной железной дороге находится под напряжением 3 кВ постоянного тока. Электроды свариваются с корпусом гироскопа с соблюдением требований вакуумирования. Точность обработки, геометрического размера и взаимного расположения находятся на уровне микронов.
Еще один важный технологический этап изготовления гироскопа — это очистка и полировка каналов, по которым пробегает лазерный луч. Сначала их довольно долго промывают кислотами для того, чтобы в них не осталось ни одной посторонней наночастицы. Полировка осуществляется тоже кислотами, потому что при сверлении возникает так называемый трещиноватый слой. В микротрещинах скапливаются газы и посторонние наночастицы, остающиеся от предыдущих этапов обработки. Если корпус прибора вакуумировать без удаления трещиноватого слоя, из этих микротрещин начинают выделяться посторонние молекулы, они портят среду внутри гироскопа.
К полировке граней прибора предъявляют жесткие требования. Например, зеркало (его делают из того же материала, что и корпус) садится на корпус гироскопа на так называемый оптический контакт, то есть крепится за счет диффузии материала, когда молекулы одной детали притягиваются к молекулам другой, проникают в ее тело, и детали становятся фактически единым целым, образуя герметичное соединение. Проведенные испытания на ударную прочность с перегрузкой в 100 g показали высокую эффективность такого соединения. Для его достижения нужна прецизионная обработка поверхности корпуса.

Есть свои трудности и в электронике. Приходится работать с маломощным частотно-модулированным сигналом, для которого надо обеспечить определенное усиление, фильтрацию, подавление помех и преобразование в цифру. Кроме того, надо обеспечить защиту его от помех во всех условиях эксплуатации.
БИНС должен выдерживать интервалы рабочих температур от минус 60 до плюс 55 градусов по шкале Цельсия. Технология изготовления прибора гарантирует его надежную работу во всем диапазоне температур в процессе полного жизненного цикла самолета, который составляет десятки лет.
Одним словом, в процессе производства приходится преодолевать множество трудностей. В основном они сконцентрированы вокруг оптики и кольцевого лазерного гироскопа. В их изготовлении сошлось много технологических переделов от физики, химии, оптики, математики. Но российские производители овладели всеми знаниями.
Проблема, которую теперь необходимо решить, связана с тиражированием и автоматизацией операций с целью снижения издержек и повышения надежности готовых изделий.
Гироскопы до недавнего времени оставались штучным товаром, хотя потребность в них постоянно росла. Большая доля ручного труда в шлифовке зеркал замедляла темпы производства, да и стоимость оставалась относительно высокой.
Хорошо Китаю с численностью населения почти 1,4 млрд человек. Там ничего не стоит посадить на шлифовку корпусов 100 тысяч рабочих и через месяц получить 100 тысяч гироскопов. Лет двадцать назад мы помогали китайцам в налаживании производства первых кольцевых лазерных гироскопов, а теперь Поднебесная опережает Россию в их производстве.
Хорошо дело поставлено во Франции. Там нет 100 тыс. шлифовщиков, зато есть специальные станки, они шлифуют по 24 корпуса одновременно. Россия в силу не географического, а прежде всего политического положения оказалась между Востоком и Западом. Мы ограничены в рабочей силе, а доступ к западным технологиям и оборудованию перекрыт санкциями Евросоюза и США. И все же, санкции санкциями, а работать надо.
Осуществляемый у нас в стране проект технического перевооружения заводов для производства всех систем, включая и оптические компоненты, рассчитан на выпуск 1,5 тыс. высокоточных систем в год, в том числе и для наземной техники. Это значит, в России будут производить ежегодно 4,5 тыс. гироскопов и 20 тыс. зеркал для них соответственно.
«Аэродромы, которые откликались на наш зов, не могли определить, где мы находимся. «Пеленг дать не можем… Пеленг дать не можем…», — повторяли они, потому что наш голос доносился до них отовсюду и ниоткуда…. Вот тогда мы почувствовали, что заблудились в пространстве…».
Эти строки принадлежат перу известного французского писателя, поэта и профессионального летчика Антуана де Сент-Экзюпери, c 1926 года — пилота на авиалинии компании «Латекоэр»» между Тулузой и Дакаром. В войну Экзюпери не вернулся из полета. И только спустя десятилетия удалось найти место катастрофы его самолета.
Сегодня мы с трудом представляем себе, как можно заблудиться в небе, в космосе, на воде и под водой, когда навигаторы стоят в автомобилях, на которых мы ездим, в смартфонах и в «умных часах». А на самолетах и кораблях эти системы еще и многократно дублируются.
Поэтому, если вдруг по какой-то причине пропадет навигационный сигнал от спутника, не волнуйтесь — БИНС выведет самолет к нужному аэродрому, а ракету наведет на заданную цель.