Что такое BLDC-мотор
BLDC двигатель, он же вентильный двигатель — это бесколлекторный синхронный двигатель постоянного тока на постоянных магнитах. Функцию коллектора в данном случае выполняет электронный контроллер, как если бы двигатель был коллекторный — контроллер переключает обмотки в зависимости от положения ротора с магнитами, определяемого датчиками Холла, установленными в мотор. Если двигатель застопорить, то контроллер будет подавать ток в те две фазы, которые должны его стронуть в нужную сторону. Контроллер не будет переключать фазы, пока ротор стоит. Дополнительно в отличие от механических коллекторов, это обеспечивает работу большого количества магнитных пар, чем может быть обеспечен значительно больший момент.
По сути, BLDC – это коллекторный двигатель с «электронным коллектором», но лишенный его недостатков в виде механического износа щеток и постоянного обслуживания щеточного узла для удаления нагара и загрязнений.
«Вентильный электродвигатель» — это наше, советское название. В зарубежной литературе они называются по другому. Общие аббревиатуры для обозначения синхронных бесколлектроных электродвигателей постоянного тока — это BLDC или PMSM:
BLDC — Brushless DC electric motor (бесколлекторный электродвигатель постоянного тока).
PMSM — Permanent Magnet Synchronous Motor (синхронный двигатель с постоянными магнитами).
Конструкция:
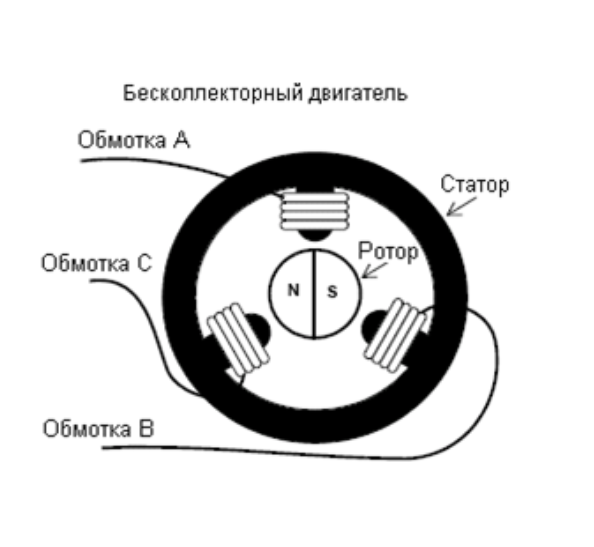
В роторе двигателя размещаются постоянные магниты, создающие магнитное поле, которые чередуются + — + -. В зависимости от количества магнитов, двигатель имеет соответствующее количество полюсов. Роторы линейки Golden Motor 3-5-10-20кВт имеют 8 магнитов, т.е. 4 пары магнитов.
Статор сделан из электротехнической стали и медной обмотки, уложенной в пазы сердечника. Количество обмоток определяет количество фаз двигателя. Для вращения необходимы 3 фазы. Обычно ВД трёхфазные, в Golden Motor в т.ч.
BLDC двигатель так же имеет более высокие эксплуатационные характеристики по сравнению с асинхронными двигателями. Он обладает лучшей удельной мощностью (мощность на килограмм массы), лучшим КПД, особенно на низких оборотах и на старте, более простое управление (асинхронным двигателям требуется чистый синус).
Каждому мотору нужен свой управляющий контроллер. Ниже представлено видео, объясняющее принцип действия:
Бесколлекторный двигатель постоянного тока
Бесколлекторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.

Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). Большинство бесколлекторных двигателей постоянно тока — трехфазные , поэтому на статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
 |
 |
 |
 |
 |
 |
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла . Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя . Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
BLDC motor: маркетинговый жаргон или нечто большее?
Термин «бесщеточный двигатель постоянного тока» (или двигатель BLDC) является общепринятым в промышленном мире. Вопрос в том, имеет ли это какой-то смысл?
Возможно, здесь может помочь небольшая история. Первые бесщеточные двигатели постоянного тока продавались как таковые, поскольку они служили заменой щеточным двигателям постоянного тока. Был ряд технологических инноваций, которые привели к появлению двигателей BLDC. Одним из них была доступность твердотельных коммутационных устройств в 1960-х годах. Это позволило осуществлять коммутацию щеток в щеточных двигателях постоянного тока электронным способом, устраняя необходимость в щетках. Вторым нововведением стало появление в 1980-х годах новых, более сильных постоянных магнитов, которые сделали двигатели более мощными.
Функционально двигатель BLDC работает как двигатель постоянного тока в одном важном смысле; он имеет вход постоянного тока. Этот вход постоянного тока затем преобразуется в переменный, который возбуждает цепь двигателя. И есть причина, по которой многие считают обозначение бесщеточного двигателя постоянного тока неправильным, утверждая, что по сути двигатель действительно является синхронным двигателем переменного тока с постоянными магнитами.
Тем не менее, это имя продолжает жить. Чтобы провести различие между различными двигателями, которые питаются от источников постоянного тока, все же может быть полезно говорить таким образом. Например, большинство таксономий делят двигатели на переменного и постоянного тока, причем последние подразделяются на щеточные и бесщеточные двигатели. Это также может быть простая инерция (и под “инерцией” мы подразумеваем не определение, используемое в физике, а скорее то, которое связано с человеческой силой привычки), не имеющая особого оправдания с технической точки зрения.
Итак, взвесьте; что вы думаете о обозначении BLDC? Должно ли это остаться или должно уйти?
Чипгуру
Всем здравствуйте! Итак, предлагаю обсудить и разобраться в сути BLDC моторов (бесколлекорных электродвигателей с постоянными магнитами). Такими движками можно оборудовать различный транспорт от скейтборда и самоката, до полноценного авто на электротяге. да и не только электротранспорт. А потому было бы ооочень интересно узнать методы расчетов, формулы и пр., таких движков как для самостоятельной сборки оного с нуля, так и исходя из имеющегося железа. Например есть в наличии статор, то какие характеристики с него можно получить?! Как их получить?! И самое главное помимо расчетов железа, не помешало бы разобрать электронную составляющую — контролёры, инверторы и др. Т.к. эти двигатели и электроника управления ими тесно связаны.
Я в этом полный дуб, потому хотелось для себя разобраться, понять и научится строить БК моторы.
Тема создана в связи с наличием велика, статора, подходящего для создания БК мотора и желания установить последний на велосипед.
Надеюсь на ваше понимание и помощь! Вместе, думаю, разберемся, а выкладки по этой теме могут пригодится многим
Отправлено спустя 16 минут 51 секунду:
BLDC — двигатели бесколлекторные постоянного тока и ч постоянными магнитами. Имеют три выхода с обмоток и являются трезфазными двигателями. А потому для их работы необходима электронная система управленя.
Бывают двух видов:
Inranner — классический вид, статор снаружи и ротор с магнитами внутри. Обычно высокооборотных.
Outranner — когда статор внутри и ротор с магнитами с наружи.
BLDC (БК мотор) — что, как, почему.
Сообщение #2 T-Duke » 23 фев 2018, 16:27
Как тот, кто уже много лет занимается этой тематикой, хочу сказать, что нужно еще правильно классифицировать моторы.
Английская аббревиатура BLDC говорит, что это просто Двигатель постоянного тока без щеток. Иными словами это бесколлекторный двигатель в понимании механического коллектора. Но без коллектора много типов двигателей с постоянными магнитами.
Поэтому принято называть именно BLDC двигатели с трапецеидальной формой тока. А двигатели которые питаются синусоидальным током, относят к другим подклассам — например PMSM.
Так же и режимы работы разные. Исконные BLDC работают в так называемом режиме блочной коммутации. То есть на обмотки подается не синус, а просто два состояния — включена обмотка, или выключена. При работе такой двигатель создает характерный тракторный шум. Можно двигатель питать от синусоидального контроллера. Их еще называют векторными. Тогда двигатель вертится плавно, без рывков и тракторного шума.
Следует отметить, что как правило на рынке не BLDC двигатели, а PMSM двигатели. Разница у них в конструкции магнитной системы. Именно BLDC двигатели заточены под работу с блочной коммутацией. У них рывки при переходе полюсов меньше. Если же запустить в блочном режиме синусоидальный двигатель, то он дергает сильнее, чем исконный BLDC. То есть пульсация крутящего момента у него выше. На видео как раз двигатель типа PMSM работающий в режиме BLDC двигателя.
Китайцы делают в основном PMSM двигатели для транспорта. Их проще делать. Поэтому родной режим работы таких двигателей не BLDC, а синусоидальный. и правильный контроллер к ним — синусоидальный (векторный).
Но конечно двигатели работают в обеих режимах. Мне лично нравится синусоидальный плавный режим работы. Именно это направление я и развивал для себя.