Подсистема питания в микроконтроллере
Для питания любого МК требуются, как минимум, два провода: положительный («плюс», «Power supply») и отрицательный («минус», «Ground reference»). Обозначают их в даташитах и на схемах следующими сокращениями (Рис. 2.8):
- Vcc (Voltage Collector-to-Collector) или VDD (Voltage Drain-to-Drain);
- GND (GrouND) или Vss (Voltage Source-to-Source).

Внутреннее сопротивление МК обозначается переменным резистором Rx. Почему переменным? Потому, что ток потребления МК варьируется по мере исполнения программы. Зависит он также от режима работы, напряжения питания, температуры, тактовой частоты, нагрузки на выходные линии. В «спящем» режиме ток составляет единицы микроампер, в рабочем — десятки миллиампер, в максимально нагруженном — 0.1 . 0.3 А. Конкретные значения приводятся в даташите.
Таблица 2.4. Варианты обозначения выводов питания МК
Пары условных обозначений в даташитах
Несколько замечаний о принятых в международной инженерной практике условностях [2-3]. Напряжение на выводе биполярного транзистора по отношению к общему проводу GND обозначается буквой «V» (англ. «Voltage») и одним из подстрочных индексов: «В» (англ. «Base», база), «С» (англ. «Collector», коллектор), «Е» (англ. «Emitter», эмиттер). К примеру, Vc — это напряжение на коллекторе относительно GND. Напряжение между двумя выводами транзистора обозначается двойным индексом: VCE — это напряжение между коллектором и эмиттером.
Индекс, образованный двумя одинаковыми буквами указывает на источник питания: Vcc — положительный, VEE — отрицательный контакт. Образно можно представить себе транзистор проводимости п—р—п, у которого коллектор соединяется с питанием (С-С), а эмиттер с «массой» (Е-Е). Транзисторы проводимости р—п—р в эту стройную теорию не помещаются, сказывается тот факт, что они изначально по технологическим причинам были меньше распространены.
Для полевых ^-канальных транзисторов существуют аналогичные названия, соответственно, VDD (плюс питания, напряжение «сток — сток», «Drain-to-Drain») и Vss (минус питания, напряжение «исток — исток», «Source-to-Source»).
Поскольку современные МК состоят из полевых транзисторов, то логично было бы их выводы питания обозначить парой «^dd’^ss^» а не «^cc’GND», как у микросхем ТТЛ-логики. Однако, здесь начинается самое интересное (Табл. 2.4). Единообразие отсутствует даже в М К одной фирмы и одного семейства.
Пример 1. Микросхема Z86L33 фирмы Zilog, выполненная в корпусе с 28 выводами, имеет название цепей питания «^dq-^ss»’ а та же микросхема в корпусе с 40 выводами — «KCC-GND».
Пример 2. В семействе ATmega фирмы Atmel принято обозначение «KCC-GND» (далее в книге как основное), а в семействе ARM той же фирмы «Kdd-GND».
Пример 3. МК К1816ВЕ49 имеет два вывода питания, один из них Vcc является основным, а другой VDD служит для подключения резервной батареи.
Наверное, дальше всех в казуистике названий продвинулась микросхема TMS320F фирмы Texas Instruments, имеющая вывод общего провода с «двойной фамилией» KSS1AGND.
Тем, кто часто работаете разными семействами МК, пригодится простое мнемоническое правило — поскольку за буквой «С» латинского алфавита сразу следует буква «D», значит Vcc и VDD относятся к одной и той же цепи, т.е. к питанию. Вывод GND ни с чем не спутаешь, это «земля», «общий провод». Остаётся обозначение Vss, которое методом исключения приравнивается к GND.
Кстати, слово «вывод» (англ. «pin» — булавка) употребляется в электронике для микросхем, транзисторов, конденсаторов, диодов, резисторов, оптопар, катушек индуктивности. Слово «контакт» — для разъёмов, переключателей, джамперов, реле, перемычек, а вот сленговые названия «ноги, ножки» более характерны человеку, нежели электронному изделию.


Организация питания в МК
Двухпроводное питание современным МК досталось по наследству от «прадедушек» i8048/i8051. Сейчас оно в основном применяется в малогабаритных МК с числом выводов 6. 18, например, в Atmel ATtiny, Microchip PIC10/12. Мера вынужденная, т.к. свободных выводов катастрофически не хватает.
С развитием технологии в состав М К стали вводить аналоговые узлы АЦП/ЦАП, которые весьма чувствительны к помехам. Произошёл естественный переход на трёх- (Рис. 2.9), четырёх- (Рис. 2.10, а. в) и многопроводные (Рис. 2.11, а, б) схемы питания.
Добавление цепей AVCC (Analog УСС) и AGND (Analog GND) позволяет развязать между собой аналоговые и цифровые части микросхемы, уменьшить импульсные помехи, повысить инструментальную точность каналов АЦП и ЦАП.
Переменные резисторы ЯА и RD отличаются между собой по сопротивлениям. Во времени они тоже изменяются по разным законам. Например, в рабочем режиме «цифровой» ток значительно больше «аналогового». Следовательно, RA больше, чем Rd. В ждущем режиме ситуация может измениться с точностью до наоборот.


Резисторы Rg, Ry — это омические сопротивления, непосредственно измеренные тестером между выводами микросхем. Их наличие или отсутствие не поддаётся логическому предсказанию и обычно не указывается в даташитах. Например, в одном и том же семействе Atmel ATmega у микросхем ATmega8 и ATmega 16 питание выполняется, соответственно, по схемам, изображённым на Рис. 2.10, в и Рис. 2.10, б.
В каждом конкретном случае разобщённость внутренних цепей надо проверять экспериментально, не надеясь на знаменитый славянский «авось». Абсолютные значения сопротивлений резисторов RG, Rw у разных фирм отличаются, что связано с особенностями технологии изготовления.
Многопроводные схемы особенно характерны для 16- и 32-битных МК, у которых питание разделяется на несколько потоков. А именно: ядро процессора, периферийные буферы, аналоговая часть, система фазовой автоподстройки частоты (ФАПЧ), генераторный блок и т.д. Названия цепей встречаются самые экзотические: VDDA2, KDD18, KDDC0RE, К33, DVCC, VDDAKSS4, DVSS, KSSA. Рекордсменом в этой области можно считать М К семейства Atmel АТ91 САР, где в одном корпусе насчитывается 12 неповторяющихся названий выводов питания и 8 вариаций названий общего провода. Каждая из силовых цепей в свою очередь продублирована несколькими одноимёнными выводами с разных сторон четырёхгранного корпуса, что позволяет равномернее распределить токовую нагрузку.
Фильтрация помех
Если посмотреть на осциллограмму тока потребления МК, то в ней можно заметить низкочастотную (НЧ) и высокочастотную (ВЧ) составляющие. Как следствие, колебания тока приводят к появлению НЧ- и ВЧ-помех на зажимах питания. Для их ослабления используют стандартные решения в виде связки конденсаторов (Рис. 2.12, Рис. 2.13), 1С- и ДС-фильтров (Рис. 2.14, Рис. 2.15).
Неполярные конденсаторы С1, C3 ослабляют ВЧ-помехи. Их наличие обязательно возле любого МК, причём максимально близко от выводов питания (не более 50 мм). Конденсаторы должны быть керамические, например, К10-17 или поверхностно монтируемые чип-коденсаторы ходовых размеров 0603. 1206.
Базовый номинал ёмкости 0.1 мкФ выбран условно, как легко запоминающийся. Устройство будет нормально функционировать и при 0.068 мкФ, и при 0.15. 0.22 мкФ. Иногда параллельно конденсатору С1 ставят ещё одну неполярную ёмкость 1000 пФ, которая снижает уровень радиоизлучений. Обычно такой способ применяют в профессиональной аппаратуре, чтобы войти в допуск при проверках изделия на электромагнитную совместимость и радиопомехи.


Полярный конденсатор С2 желательно использовать танталовый (а не алюминиевый), поскольку он лучше подавляет импульсные помехи. При выборе ёмкости можно руководствоваться эмпирическим правилом, которое заимствовано из многолетней практики применения сетевых источников питания — 1000 мкФ на каждый ампер тока нагрузки. К примеру, если цифровая часть МК потребляет ток 10. 30 мА, то достаточно поставить конденсатор С2 ёмкостью 10. 30 мкФ с рабочим напряжением не менее 6.3 В. Знатоки рекомендуют выбирать более высоковольтные конденсаторы с напряжением 10. 16 В, поскольку повышается надёжность в эксплуатации и, главное, снижается внутренний импеданс, что позволяет лучше фильтровать помехи.
Конденсатор С2 обязателен при батарейном питании в качестве накопителя энергии, а также при значительных колебаниях и скачках напряжения. В некоторых случаях его функцию выполняет конденсатор фильтра сетевого выпрямителя или стабилизатора напряжения. Как вариант, конденсатор С2 может физически размещаться вблизи других цифровых микросхем и косвенно воздействовать на цепь питания МК.
Катушка индуктивности L1 развязывает цифровую и аналоговую части по высокой частоте. Если её не ставить, то может ухудшиться точность измерения АЦП и стабильность порога срабатывания аналогового компаратора. Как ни парадоксально, но значительную часть помех по питанию создают внутренние цифровые узлы МК, поэтому 1С- и /?С-фильтры защищают контроллер от . самого себя. Номинал индуктивности L1 не особо критичен и может варьироваться в широких пределах.
Ферритовая «бусинка» FBI (Ferrite Bead) представляет собой проводник, пропущенный через ферритовое кольцо или цилиндр. Этот элемент способствует снижению высокочастотных излучений, которые можно зафиксировать лишь специальными измерительными радиоприёмниками в экранированной «безэхо-вой» камере. Такие испытания обязательны при сертификации продукции.
В любительской практике фильтр FBI ставится редко, разве что в связной спортивной аппаратуре, где помехи от МК могут существенно повлиять на качество принимаемого радиосигнала и значительно ухудшить чувствительность.
Таблица 2.5. Пределы изменения напряжения питания МК
Порты ввода-вывода
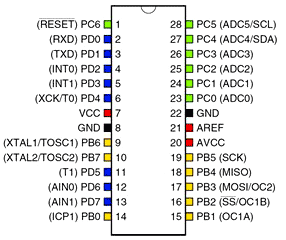
Систему ввода-вывода микроконтроллеров AVR можно считать одной из самых сильных сторон архитектуры. Каждая линия допускает независимое управление, имеет симметричные нагрузочные характеристики и номинальные втекающий и вытекающий токи до 20…25 мА (максимальный до 40 мА) с просадкой напряжения не более 0.7 В. Линии объединяются в 8-разрядные порты ввода-вывода, которые у AVR имеют названия A,B,C…K,L. Обозначение каждой линии на схеме определяет ее принадлежность к порту и порядковый номер. Например, выводы порта B имеют названия PB0,PB1…PB7, порта D — PD0,PD1…PD7 и т.д. В различных моделях отдельные порты могут содержать меньше 8 линий ввода-вывода. 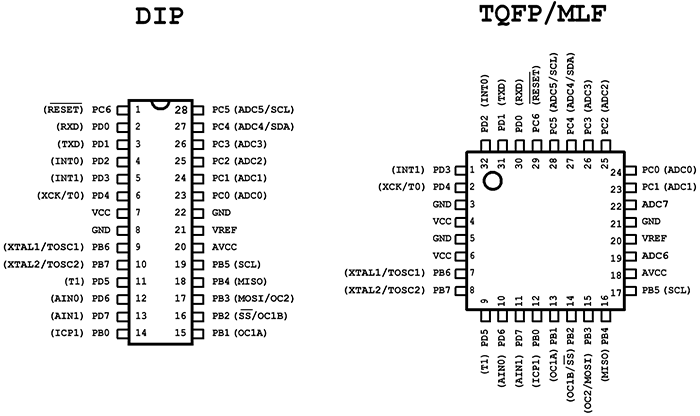
Рис.11 Расположение выводов ATmega8 Большинство выводов AVR-микроконтроллеров имеют также альтернативные назначения. Это аналоговые линии компаратора и АЦП, цифровые модулей SPI, TWI, USART и т.д. Описание выводов микроконтроллера ATmega8 находится в табл.6, а схема их расположения на рис.11. 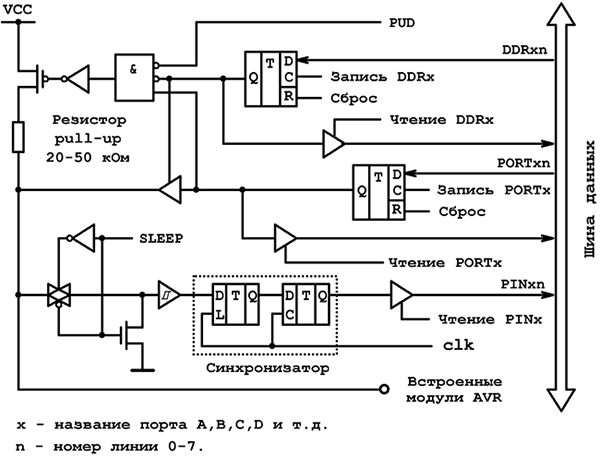
Рис.12 Внутрення схема линии порта ввода-вывода Упрощенная внутренняя схема линии порта ввода-вывода приведена на рис.12. Каждым портом микроконтроллера управляют 3 РВВ. Это DDRx, PORTx и PINx (x – название порта: A,B,C и т.д.). Регистры портов A,B,C,D всех моделей находятся в первой половине адресного пространства ввода-вывода и поэтому допускают прямые операции над отдельными их битами. В цифровых портах AVR реализована истинная функциональность “чтение-модификация-запись”. Регистр DDRx отвечает за направление передачи данных. Запись лог.1 в разряды DDRx настраивает линии на вывод, а запись лог.0, соответственно, на ввод. Например:
ldi R16,0b11100011 ;настроить на ввод линии 2,3,4 и out DDRB,R16 ;на вывод линии 0,1,5,6,7 порта B sbi DDRB,0 ;настроить на вывод линию 0 порта B cbi DDRB,1 ;настроить на ввод линию 1 порта B
Регистр PORTx имеет двойное предназначение. Если линии порта настроены на вывод, то содержимое PORTx определяет логическое состояние выводов порта. Для линий настроенных на ввод значение PORTx определяет состояние внутреннего подтягивающего (pull-up) резистора к шине питания. В этом случае при уровне лог.1 в разрядах PORTx резистор подключен, а при уровне лог.0 – отключен и линии переведены в высокоимпедансное состояние (z-состояние):
ldi R16,0b11110000 ;настроить на вывод линии 4…7 out DDRC,R16 ;и на ввод линии 0…3 порта С ldi R16,0b11111111 ;выставить на линиях 4…7 порта С уровень лог.1 out PORTC,R16 ;и подключить к линиям 0…3 порта С pull-up резисторы sbi DDRC,0 ;настроить на вывод линию 0 порта C cbi PORTC,0 ;выставить на линии 0 порта С уровень лог.0 сbi DDRC,1 ;настроить на ввод линию 1 порта C сbi PORTC,1 ;перевести линию 1 порта С в z-состояние
Регистр PINx предназначен для считывания уровней сигнала с выводов микроконтроллера. Естественно, что необходимость в этом существует только для линий настроенных на ввод (для линий настроенных на вывод содержимое PINx повторяет состояние выходного регистра PORTx). Разряды PINx не оказывают ни какого влияния на состояние выводов, а сам регистр доступен только для чтения. Логический уровень входной линии фиксируется в триггере-защелке в каждом цикле тактовой частоты. Таким образом, реальное значение сигнала при считывании может иметь отставание порядка 0.5…1.5 машинных циклов. Пример использования:
cbi DDRD,0 ;настроить на ввод линию 0 порта D sbi PORTD,0 ;подключить к линии 0 порта D pull-up резистор nop ;задержка 1 цикл для установки режима sbis PIND,0 ;считать состояние линии 0 порта D rjmp ulo ;если лог.0, то перейти на метку ulo rjmp uhi ;если лог.1, то перейти на метку uhi
У микроконтроллеров AVR имеется возможность управлять pull-up резисторами сразу на всех его выводах. За это свойство отвечает бит PUD из РВВ SFIOR либо MCUCR. При установке разряда PUD запрещается подключение всех резисторов. При PUD=0 (значение после сброса) состояние внутренних резисторов определяется состоянием регистра PORTx. Различные возможности конфигурации линий портов ввода-вывода AVR приведены в табл.7. На время спящего режима (после выполнения команды sleep) входной буфер порта отключается. При использовании выводов микроконтроллера по их альтернативному назначению, может понадобится вручную сконфигурировать линии. Так, например, в случае применения компаратора, АЦП, внешних прерываний соответствующие линии должны быть переведены в z-состояние, а для ШИМ-выводов таймеров счетчиков и выходных сигналов других модулей линии должны быть настроены на вывод. Табл.6. Описание выводов модели ATmega8(L):
| Номер вывода в корпусе DIP-28 | Номер вывода в корпусах TQFP-32 и MLF-32 |
Функция вывода | Описание |
| 14 | 12 | PB0 | 0-й бит порта B |
| ICP1 | Вход захвата таймера-счетчика 1 | ||
| 15 | 13 | PB1 | 1-й бит порта B |
| OC1A | ШИМ-вывод A таймера-счетчика 1 | ||
| 16 | 14 | PB2 | 2-й бит порта B |
| OC1B | ШИМ-вывод B таймера-счетчика 1 | ||
| SS | Вывод Slave нашине SPI | ||
| 17 | 15 | PB3 | 3-й бит порта B |
| OC2 | ШИМ-вывод таймера-счетчика 2 | ||
| MOSI | Выход Master или вход Slave данных на шине SPI | ||
| 18 | 16 | PB4 | 4-й бит порта B |
| MISO | Вход Master или выход Slave данных на шине SPI | ||
| 19 | 17 | PB5 | 5-й бит порта B |
| SCK | Выход Master или вход Slave тактового сигнала модуля SPI | ||
| 9 | 7 | PB6 | 6-й бит порта B |
| XTAL1 | Вывод тактового генератора | ||
| TOSC1 | Вывод для подключения резонатора к таймеру-счетчику 2 | ||
| 10 | 8 | PB7 | 7-й бит порта B |
| XTAL2 | Вывод тактового генератора | ||
| TOSC2 | Вывод для подключения резонатора к таймеру-счетчику 2 | ||
| 2 | 30 | PD0 | 0-й бит порта D |
| RXD | Вход USART | ||
| 3 | 31 | PD1 | 1-й бит порта D |
| TXD | Выход USART | ||
| 4 | 32 | PD2 | 2-й бит порта D |
| INT0 | Вход внешнего прерывания 0 | ||
| 5 | 1 | PD3 | 3-й бит порта D |
| INT1 | Вход внешнего прерывания 1 | ||
| 6 | 2 | PD4 | 4-й бит порта D |
| XCK | Вход/выход внешнего тактового сигнала модуля USART | ||
| T0 | Вход/выход внешнего тактового сигнала таймера-счетчика 0 | ||
| 11 | 9 | PD5 | 5-й бит порта D |
| T1 | Вход/выход внешнего тактового сигнала таймера-счетчика 1 | ||
| 12 | 10 | PD6 | 6-й бит порта D |
| AIN0 | Неинвертирующий вход компаратора | ||
| 13 | 11 | PD7 | 7-й бит порта D |
| AIN1 | Инвертирующий вход компаратора | ||
| 23 | 23 | PC0 | 0-й бит порта C |
| ADC0 | 0-й вход АЦП | ||
| 24 | 24 | PC1 | 1-й бит порта C |
| ADC1 | 1-й вход АЦП | ||
| 25 | 25 | PC2 | 2-й бит порта C |
| ADC2 | 2-й вход АЦП | ||
| 26 | 26 | PC3 | 3-й бит порта C |
| ADC3 | 3-й вход АЦП | ||
| 27 | 27 | PC4 | 4-й бит порта C |
| ADC4 | 4-й вход АЦП | ||
| SDA | Вход/выход данных модуля TWI | ||
| 28 | 28 | PC5 | 5-й бит порта C |
| ADC5 | 5-й вход АЦП | ||
| SCL | Вход/выход тактового сигнала модуля TWI | ||
| 1 | 29 | PC6 | 6-й бит порта C |
| RESET | Вход сброса | ||
| — | 19 | ADC6 | 6-й вход АЦП |
| — | 22 | ADC7 | 7-й вход АЦП |
| 8,22 | 3,5,21 | GND | Общий вывод |
| 21 | 20 | VREF | Вход опорного напряжения для АЦП |
| 20 | 18 | AVCC | Вывод источника питания АЦП |
| 7 | 4,6 | VCC | Вывод источника питания микроконтроллера |
Табл.7. Конфигурация выводов порта:
| DDRxn | PORTxn | PUD | Функция вывода | Резистор | Примечание |
| 0 | 0 | X | Вход | Отключен | На выводе z-состояние |
| 0 | 1 | 0 | Вход | Подключен | На выводе присутствует положительное смещение к источнику питания |
| 0 | 1 | 1 | Вход | Отключен | На выводе z-состояние |
| 1 | 0 | X | Выход | Отключен | На выводе лог.0 |
| 1 | 1 | X | Выход | Отключен | На выводе лог.1 |
Перейти к следующей части: Система команд — Способы адресации
Теги:
 Котов Игорь Юрьевич
Котов Игорь Юрьевич  Опубликована: 2012 г.
Опубликована: 2012 г.  0
0  0
0
![]()
 Вознаградить Я собрал 0 0
Вознаградить Я собрал 0 0
Оценить статью
- Техническая грамотность
Чем Отличаются Выводы Gnd От Agnd И Vcc От Avcc?
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Поделиться
Последние посетители 0 пользователей онлайн
- Ни одного зарегистрированного пользователя не просматривает данную страницу
Сообщения
Прошло три года, но все равно. А разве не 24×1,41-падение напряжения на VD1?

Что мешает подключить, например, контакты реле к этому переключателю, а реле управлять с малины? А без этой платы она не хочет работать?
Привет всем. Вообще, при включении программы на мультиварке Redmond RMC M4500, через некоторое время, начинает дымится. При включении в 220вт, тэн не нагревается. Разобрал, проверил мультиметром, ТЭН показывает 50 Ом сопротивления, при мощности 860w. Термо датчики( верхний, нижний) 50 КоМ, в термо предохранителе прозвон есть. Я так понимаю перегрев ТЭНа. Плата чистая, микротрещины не знаю пока как найти))) Плата управления рабочая. Я только начал учиться, не судите строго). Можете подсказать, что ещё влияет ( релле, стабилитрон . )? Как проверить? Не хочу нести в ремонт, уже ради принципа, хочется самому разобраться)))) Помогите пожалуйста.

Отладочный по нажатому + ? Ок. LM833, установка 0 потом отладочный при разомкнутых. LF353, заново установка 0 потом отладочный при разомкнутых.

Рассчитайте эквивалентный источник напряжения между точками 1 и 2. Я не совсем понимаю, что имелось ввиду. Рассчитать методом эквивалентного источника или что-то другое?
очень странное предпоследнее фото — сигнал на выходе (желтый) появляется раньше сигнала на входе (красный).. причем выход ОУ уходит в насыщение по + поменяйте все же ОУ если есть такая возможность.. типовое напряжение смещения таких ОУ находится в диапазоне 2 — 10 мВ.
Микроконтроллеры AVR для начинающих — 1
Микроконтроллеры (далее МК) прочно вошли в нашу жизнь, на просторах интернета можно встретить очень много интересных схем, которые исполнены на МК. Чего только нельзя собрать на МК: различные индикаторы, вольтметры, приборы для дома (устройства защиты, коммутации, термометры…), металлоискатели, разные игрушки, роботы и т.д. перечислять можно очень долго. Первую схему на микроконтроллере я увидел лет 5-6 назад в журнале радио, и практически сразу же перелистнул страницу, подумав про себя «все равно не смогу собрать». Действительно, в то время МК для меня были чем то очень сложным и непонятым устройством, я не представлял как они работают, как их прошивать, и что делать с ними в случае неправильной прошивки. Но около года назад, я впервые собрал свою первую схему на МК, это была схема цифрового вольтметра на 7 сегментных индикаторах, и микроконтроллере ATmega8. Так получилось, что микроконтроллер я купил случайно, когда стоял в отделе радиодеталей, парень передо мной покупал МК, и я тоже решил купить, и попробовать собрать что-нибудь. В своих статьях я расскажу вам про микроконтроллеры AVR фирмы ATMEL, научу вас работать с ними, рассмотрим программы для прошивки, изготовим простой и надежный программатор, рассмотрим процесс прошивки и самое главное проблемы, которые могут возникнуть и не только у новичков. Основные параметры некоторых микроконтроллеров семейства AVR:
| Микроконтроллер | Память FLASH | Память ОЗУ | Память EEPROM | Порты ввода/вывода | U питания | Частота |
| ATmega48 | 4 | 512 | 256 | 23 | 2,7-5,5 | 0-10-20 |
| ATmega48V | 4 | 512 | 256 | 23 | 1,8-4,8-5,5 | 0-4-10 |
| ATmega8515 | 8 | 512 | 512 | 35 | 4,5-5,5 | 0-16 |
| ATmega8515L | 8 | 512 | 512 | 35 | 2,7-5,5 | 0-8 |
| ATmega8535 | 8 | 512 | 512 | 32 | 4,5-5,5 | 0-16 |
| ATmega8535L | 8 | 512 | 512 | 32 | 2,7-5,5 | 0-8 |
| ATmega8 | 8 | 1K | 512 | 23 | 4,5-5,5 | 0-16 |
| ATmega8L | 8 | 1K | 512 | 23 | 2,7-5,5 | 0-8 |
| ATmega88 | 8 | 1K | 512 | 23 | 2,7-5,5 | 0-10-20 |
| ATmega88V | 8 | 1K | 512 | 23 | 4,5-5,5 | 0-4-10 |
| ATmega16 | 16 | 1K | 512 | 32 | 4,5-5,5 | 0-16 |
| ATmega16L | 16 | 1K | 512 | 32 | 2,7-5,5 | 0-8 |
| ATmega32 | 32 | 2K | 1K | 32 | 4,0-5,5 | 0-16 |
| ATmega32L | 32 | 2K | 1K | 32 | 2,7-5,5 | 0-8 |
Дополнительные параметры МК AVR mega: Рабочая температура: -55…+125*С
Температура хранения: -65…+150*С
Напряжение на выводе RESET относительно GND: max 13В
Максимальное напряжение питания: 6.0В
Максимальный ток линии ввода/вывода: 40мА
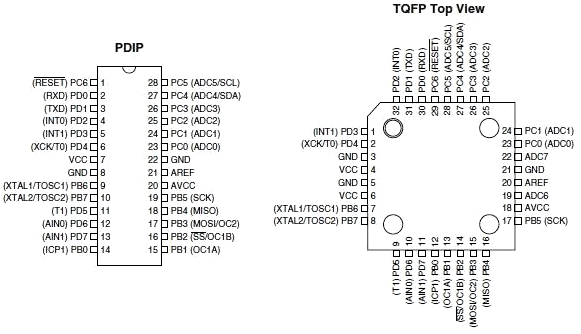
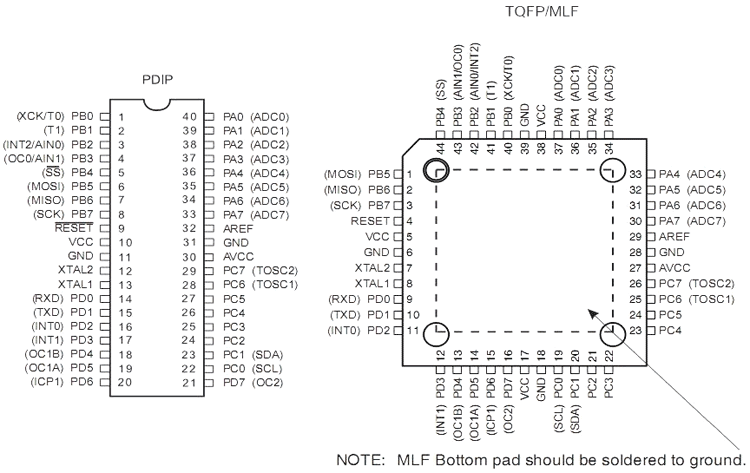
Максимальный ток по линии питания VCC и GND: 200мА Расположение выводов моделей ATmega 8X
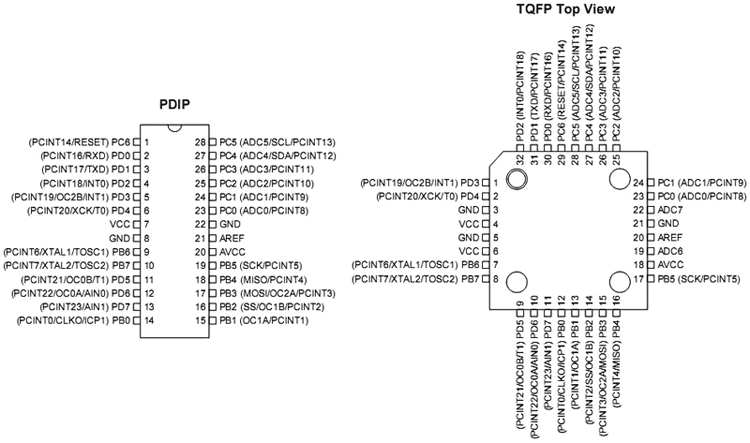
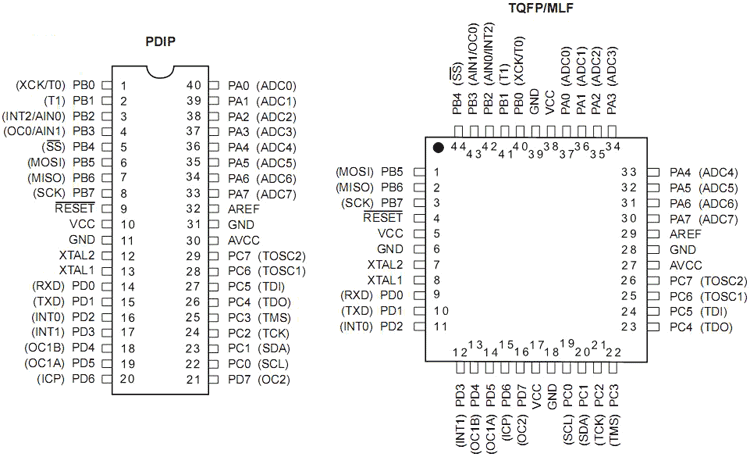
 Расположение выводов моделей ATmega48x, 88x, 168x
Расположение выводов моделей ATmega48x, 88x, 168x
 Расположение выводов у моделей ATmega8515x
Расположение выводов у моделей ATmega8515x
 Расположение выводов у моделей ATmega8535x
Расположение выводов у моделей ATmega8535x
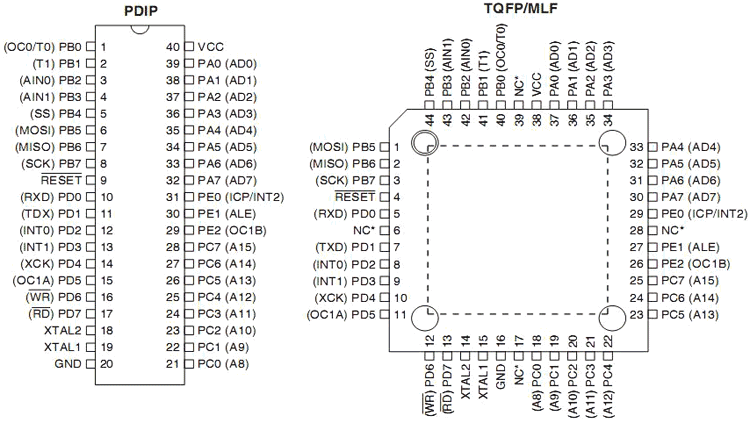
 Расположение выводов у моделей ATmega16, 32x
Расположение выводов у моделей ATmega16, 32x
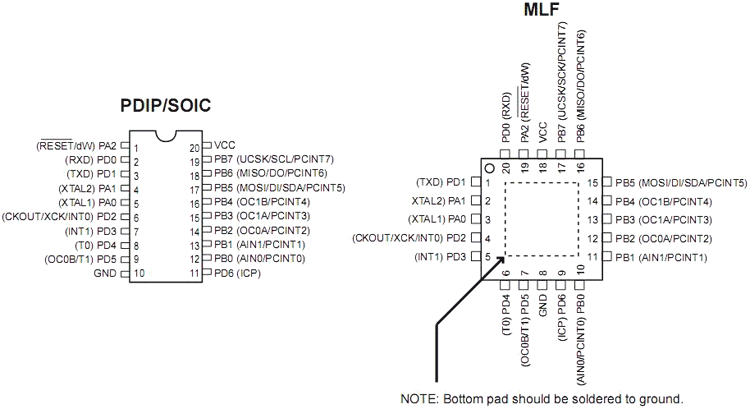
 Расположение выводов у моделей ATtiny2313
Расположение выводов у моделей ATtiny2313
 В конце статьи прикреплён архив с даташитами на некоторые микроконтроллеры Установочные FUSE биты MK AVR
В конце статьи прикреплён архив с даташитами на некоторые микроконтроллеры Установочные FUSE биты MK AVR
| BODEN | BODLEVEL | BOOTRST | BOOTSZ0 | BOOTSZ1 | CKSEL0 | CKSEL1 | SPIEN |
| CKSEL2 | CKSEL3 | EESAVE | FSTRT | INCAP | RCEN | RSTDISBL | SUT0 |
| SUT1 |
Запомните, запрограммированный фьюз – это 0, не запрограммированный – 1. Осторожно стоит относиться к выставлению фьюзов, ошибочно запрограммированный фьюз может заблокировать микроконтроллер. Если вы не уверены какой именно фьюз нужно запрограммировать, лучше на первый раз прошейте МК без фьюзов. Самыми популярными микроконтроллерами у радиолюбителей являются ATmega8, затем идут ATmega48, 16, 32, ATtiny2313 и другие. Микроконтроллеры продаются в TQFP корпусах и DIP, новичкам рекомендую покупать в DIP. Если купите TQFP, будет проблематичнее их прошить, придется купить или изготовить переходник и паять плату т.к. у них ножки располагаются очень близко друг от друга. Советую микроконтроллеры в DIP корпусах, ставить на специальные панельки, это удобно и практично, не придется выпаивать МК если приспичит перепрошить, или использовать его для другой конструкции. Почти все современные МК имеют возможность внутрисхемного программирования ISP, т.е. если ваш микроконтроллер запаян на плату, то для того чтобы сменить прошивку нам не придется выпаивать его с платы. Для программирования используется 6 выводов:
RESET — Вход МК
VCC — Плюс питания, 3-5В, зависит от МК
GND — Общий провод, минус питания.
MOSI — Вход МК (информационный сигнал в МК)
MISO — Выход МК (информационный сигнал из МК)
SCK — Вход МК (тактовый сигнал в МК) Иногда еще используют вывода XTAL 1 и XTAL2, на эти вывода цепляется кварц, если МК будет работать от внешнего генератора, в ATmega 64 и 128 вывода MOSI и MISO не применяются для ISP программирования, вместо них вывода MOSI подключают к ножке PE0, a MISO к PE1. При соединении микроконтроллера с программатором, соединяющие провода должны быть как можно короче, а кабель идущий от программатора на порт LPT так-же не должен быть слишком длинным. В маркировке микроконтроллера могут присутствовать непонятные буквы с цифрами, например Atmega 8L 16PU, 8 16AU, 8A PU и пр. Буква L означает, что МК работает от более низкого напряжения, чем МК без буквы L, обычно это 2.7В. Цифры после дефиса или пробела 16PU или 8AU говорят о внутренней частоте генератора, который есть в МК. Если фьюзы выставлены на работу от внешнего кварца, кварц должен быть установлен на частоту, не превышающей максимальную по даташиту, это 20МГц для ATmega48/88/168, и 16МГц для остальных атмег. Первые цифры в названии микроконтроллера обозначают объем FLASH ПЗУ в килобайтах, например ATtiny15 – 1 Кб, ATtiny26 – 2 Кб, AT90S4414 – 4 Кб, Atmega8535 – 8 Кб, ATmega162 – 16Кб, ATmega32 – 32 Кб, ATmega6450 – 64Кб, Atmega128 – 128Кб. Иногда встречаются схемы, где применены микроконтроллеры с названиями типа AT90S… это старые модели микроконтроллеров, некоторые из них можно заменить на современные, например: AT90S4433 – ATmega8
AT90S8515 – ATmega8515
AT90S8535 – ATmega8535
AT90S2313 – ATtiny2313
ATmega163 – ATmega16
ATmega161 – ATmega162
ATmega323 – ATmega32
ATmega103 – ATmega64/128 ATmega 8 имеет несколько выводов питания, цифровое – VCC, GND и аналоговое – AVCC, GND. В стандартном включении обе пары выводов соединяют параллельно, т.е. вместе. Микроконтроллеры AVR не любят повышенного напряжения, если питание выше 6 вольт, то они могут выйти из строя. Я обычно применяю маломощный стабилизатор напряжения на 5 вольт, КР142ЕН5 или 78L05. Если напряжение питания слишком низкое, то МК не прошьется, программа будет ругаться и выдавать ошибки (к примеру -24 в PonyProg). На этом закончим, пока можете выбрать в интернете понравившуюся схему и изучить ее, можете заодно сходить и купить нужный микроконтроллер. В следующих частях статьи мы будем собирать простой и надежный программатор, познакомимся с программами для прошивания и попробуем прошить МК. Даташит ATmega8
Даташит ATmega16
Даташит ATmega32
Даташит ATmega48/88/168
Даташит ATmega128
Даташит ATmega8515
Даташит ATmega8535
Даташит ATtiny2313
Теги:
Романов А.С Опубликована: 2012 г. 0 10
![]() Вознаградить Я собрал 0 1
Вознаградить Я собрал 0 1