Назначение виды и классификация первичных измерительных преобразователей.
Измерительный преобразователь (первичный преобразователь, датчик) это средство измерений (устройство), с помощью которого информация о состоянии объекта (физическая величина или технологический параметр) преобразуется в форму, обеспечивающую возможность передачи и дальнейшей обработки (преобразования) этой информации, но не поддающуюся непосредственному восприятию наблюдателем. Первичный преобразователь с высокой точностью реализует однозначную зависимость между двумя физическими величинами Y = F(Х),где X= X( t ) и Y=Y (t ) – сигналы на входе и выходе преобразователя.Измерительный преобразователь (датчик) включает чувствительный элемент, который собственно и воспринимает измеряемую физическую величину и преобразователь отклика датчика на воздействие этой физической величины в другую форму. Входной величиной датчика могут быть любые физические величины – давление, скорость, усилие, температура, перемещение , расход, масса, концентрация и т.д. На выходе датчика, как правило, мы имеем электрический сигнал.
Первичные измерительные преобразователи очень разнообразны по принципу действия, устройству, виду энергии входного сигнала, метрологическим и эксплуатационным характеристикам.
Существуют параметрические ПП для которых характерно то, что
сигналы, получаемые от измеряемого объекта, служат только для управления энергией постороннего источника, включенного в электрическую цепь. В данном случае основным выходным сигналом является изменение параметров электрических цепей- сопротивления, емкости, индуктивности под действием сигнала от измеряемого объекта, поэтому эти ПП называются параметрическими.
Генераторные ПП характеризуются тем, что сигналы, получаемые от измеряемого объекта, непосредственно преобразуются в электрические сигналы. При этом желаемый эффект преобразования может быть получен без использования посторонних источниковэнересь основой работы является непосредственное преобразование измеряемых сигналов различных видов в электрические сигналы (генерирование электрической энергии).
По физической природе явлений, лежащих в основе их работы, первичные преобразователи можно подразделить на:
— механические резистивные (контактные, реостатные, тензометрические)
-электростатические (емкостные, пьезоэлектрические)
-электромагнитные (индуктивные, индукционные, магнитоупругие)
-теплоэлектрические (термоэлектрические, терморезистивные)
-атомные (ионизационного излучения, квантовые) и множество других.
2 Принцип работы индуктивных измерительных преобразователей и область их применения.
Индуктивный измерительный преобразователь представляет собой электромагнит с обмоткой и подвижным якорем, перемещающийся под действием измеряемой величины Х. Изменение длины воздушного зазора приводит к изменению индуктивности обмотки L. Такие преобразователи обычно применяются при перемещении якоря на 0,01…5 мм.
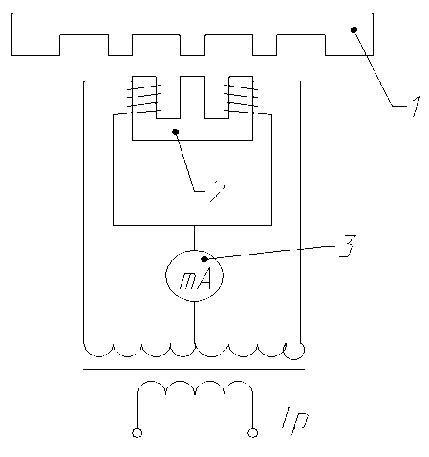
Рисунок 1 – Схема индуктивного датчика
На подвижной части станка устанавливается тонкая рейка из магнитомягкого материала. Выступы рейки 1 модулируют магнитное сопротивление рабочего зазора при движении. Магнитопровод Ш-образного сердечника 2 имеет две обмотки, включенные навстречу друг другу и питаемые от трансформатора Тр. В диагональ индуктивного моста включен измерительный прибор. В среднем положении измерительный мост сбалансирован и стрелка прибора 3 будет стоят на нуле. Незначительный разбаланс приводит к отклонению стрелки прибора. Хорошо выполненный датчик улавливает перемещения ~2 мкм.Датчики индуктивности широко применяют благодаря их существенным достоинствам: простоте, надежности и отсутствию скользящих контактов; возможности непосредственного использования показывающих приборов за счет относительно большой величины отдаваемой электрической мощности; возможности работы на переменном токе промышленной частоты.Основной областью применения индуктивных датчиков является измерение угловых и линейных механических перемещений. Изменение входного параметра в датчиках индуктивности преобразуется в изменение индуктивности катушки благодаря перемещению якоря, сердечника или катушки.
4. Первичные измерительные преобразователи
Все измерения начинаются с восприятия измеряемых величин и формирования измерительного сигнала, который затем подвергается необходимым преобразованиям. Под восприятием величин подразумевается свойство датчиков выделить и представить входную величину в виде измерительного устройства, удобного для дальнейших действий над нею. Подавляющее число физических неэлектрических величин в процессе измерения преобразуется в электрические величины. Для осуществления подобных преобразований находят широкое применение различные первичные измерительные преобразователи (ПИП). Функцию восприятия входной величины выполняет чувствительный элемент. При этом идентифицируется природа величины и происходит процесс ее восприятия. Чувствительный элемент – это часть измерительного преобразователя в измерительной цепи, воспринимающая входную величину [24]. Основой чувствительных элементов является вещество (материал), которое воспринимает входную физическую величину и в котором с помощью определенного физического эффекта входная величина преобразуется в сигнал, поступающий в последующую измерительную цепь. Измерительная цепь может включать усилители, делители, модуляторы и другие устройства преобразования измерительного сигнала. Следует отметить, что первичный измерительный преобразователь может находиться в измерительной цепи любого средства измерений и необязательно должен быть датчиком. В общем случае под датчиком следует понимать конструктивно обособленную совокупность первичных преобразователей,воспринимающую одну или несколько входных величин и преобразующую их в измерительные сигналы. В дальнейшем при рассмотрении измерительных устройств, воспринимающих входную физическую величину и преобразующих ее в измерительный сигнал, будут использоваться терминыпервичный измерительный преобразователь(ПИП) идатчик.
Рассмотрим общие характеристики первичных измерительных преобразователей вне зависимости от их физической природы. Метрологические характеристики средств измерений установлены ГОСТ 8.009-84. В п. 1.4 рассмотрены некоторые из общих характеристик СИ, к которым относятся и первичные измерительные преобразователи. В литературе, кроме рассмотренных ранее характеристик, для описания статических характеристик ПИП широко используются такие понятия как: передаточная функция или уравнение (функция, статическая характеристика) преобразования; диапазон измеряемых или преобразуемых значений (максимальный входной сигнал); диапазон выходных значений; точность; гистерезис; нелинейность; воспроизводимость; разрешающая способность; мертвая зона и др.
Передаточная функция – это идеальное (теоретическое) выражение, устанавливающее взаимосвязь между выходным сигналом датчика Y и внешним (входным) воздействием Х: Y = f(X). Эта взаимосвязь может быть представлена либо в виде таблицы, либо в виде графика, либо в виде математического выражения.
Одномерная передаточная функция – функция, связывающая выходной сигнал только с одним внешним воздействием (одним входным сигналом).
Многомерная передаточная функция – функция, связывающая выходной сигнал несколькими внешними воздействиями.

Примером датчика с одномерной передаточной функцией может являться терморезистивный датчик, а примером датчика с двумерной передаточной функцией является инфракрасный датчик температуры, у которого выходной сигнал (напряжение) связан с измеряемой абсолютной температурой Тх соотношением , где С – константа; Тs – абсолютная температура поверхности чувствительного элемента [20].
Погрешности СИ, в том числе и ПИП, есть отклонения его реальной функции преобразования от номинальной (идеальной передаточной функции).
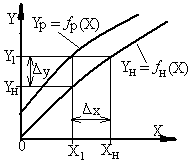
П
усть имеется ПИП с номинальной функцией преобразованияYН = fН (X) и реальной функцией преобразования YР = fР (X), приведенными на рис. 4.1. Если на выходе датчика наблюдается величина Y1, то, зная передаточную функцию YН = fН (X), можно считать, что на вход воздействует величина ХН, подсчитываемая из уравнения Y1 = fН (X), а фактически на выходе будет величина Х1. Величина ΔХ = ХН — Х1 называется погрешностью преобразователя ИП. Иногда ее называют погрешностью на входе. Зная реальную функцию преобразования YР = fР (X), можно перейти от погрешности преобразователя на входе ΔХ к погрешности преобразователя на выходе ΔY:
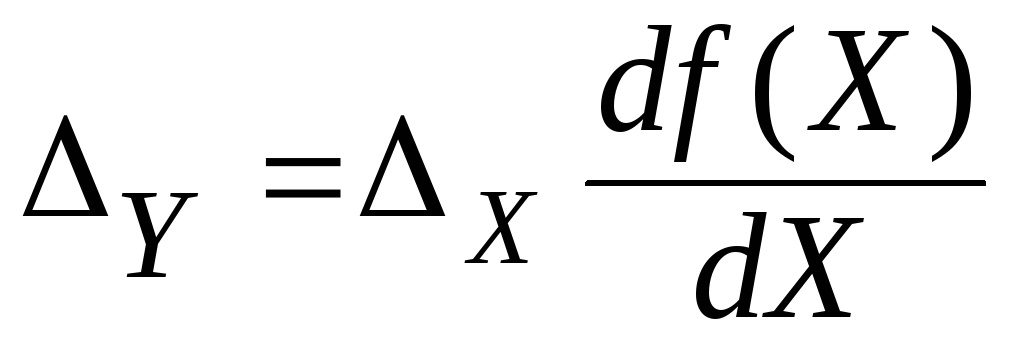
. (4.1)
Точность есть качество ПИП, отражающее близость к нулю его погрешность. Чем меньше погрешности имеет датчик, тем он считается более точным. Численно точность А определяется отношением значения измеряемой или преобразуемой величиныхк достигнутому при этом интервалу неопределенностиd= 2Δ, т.е. А =х/d= 1/(2γ).
Диапазон измеряемых (преобразуемых) значений ΔХ – это динамический диапазон внешних воздействий, который ПИП может воспринять. Эта величина определяет максимальное значение входного сигнала, которое ПИП (датчик) может преобразовать в выходной сигнал, не выходя за пределы допустимых погрешностей. Различают полный и рабочий диапазоны.
Полный диапазон– это диапазон значений входных воздействий, который датчик может преобразовать с погрешностью, не превышающей 100 %.
Рабочийдиапазон– это часть полного диапазона, в котором относительная погрешность не превышает некоторого заданного значения.
Диапазон выходных значений– алгебраическая разность между выходными сигналами, получаемыми при максимальном и минимальном входном воздействии.
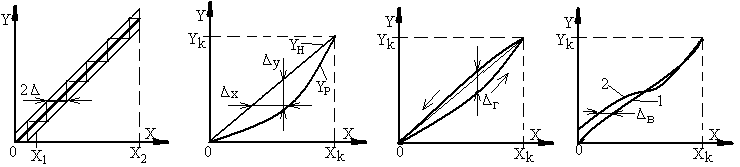
Разрешающая способность характеризует минимальное изменение измеряемой или преобразуемой величины, которое может почувствовать ПИП, и определяется как число градаций измеряемой или преобразуемой величины, различимое на выходе СИ. За различимые градации можно принять неперекрывающиеся интервалы, вписывающиеся в полосу неопределенности 2Δ преобразователя по всей ее длине (например, как показано на рис. 4.2а). Разрешающая способностьRСИ на интервале от Х1до Х2может быть определена по формуле
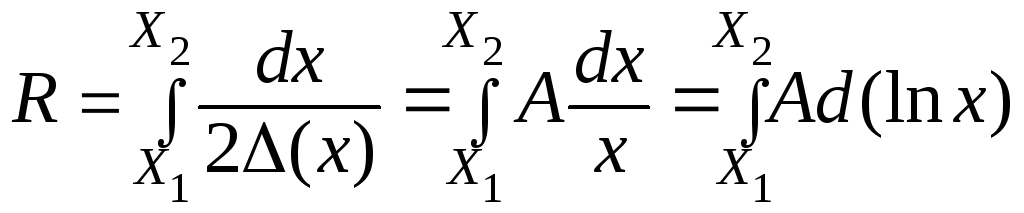
. (4.2)
Нелинейность– это максимальное отклонение реальной характеристики преобразования от аппроксимирующей прямой линии (рис. 4.2б).
Гистерезис– это разность значений выходного сигнала ПИП для одного и того же входного сигнала, полученных при его возрастании и убывании (рис. 4.2в).
Воспроизводимость– это способность ПИП при соблюдении одинаковых условий выдавать идентичные результаты. Воспроизводимость результатов определяется по максимальной разности выходных значений ПИП, полученных в двух циклах градуировки (рис. 4.2г), и обычно выражается в процентах от максимального значения входного сигнала [20]:
. (4.3)
Насыщение – это состояние датчика, когда при определенном уровне входного воздействия датчик перестает отвечать приведенной градуировочной характеристике.
Так как в любом средстве измерений сигналы, в том числе и входной сигнал, не могут распространяться с бесконечно большой скоростью, ПИП обладают не только статическими, но и динамическими характеристиками, т. е. параметрами, зависящими от времени. Взаимосвязь между входным воздействием и выходным сигналом ПИП (датчиков) можно описывать в виде линейных дифференциальных уравнений с постоянными коэффициентами, которые в зависимости от конструкции датчиков могут иметь разный порядок. Динамические характеристики СИ можно получить из решения таких уравнений.
К динамическим характеристикам датчиков относятся: операторная чувствительность, комплексная чувствительность, переходная характеристика, амплитудно-частотная и фазочастотная характеристики (АЧХ и ФЧХ) и др. Некоторые из этих характеристик определены в п. 1.4.
Если в датчике нет энергонакопительных элементов (конденсаторов, катушек индуктивностей, массы и т. п.), то такой датчик называется датчиком нулевого порядкас передаточной функцией

, (4.4)
где А0– постоянное смещение;S– статическая чувствительность.
Такие датчики относятся к СИ мгновенного действия и для них можно не определять динамические характеристики. На практике в реальных датчиках на очень высоких частотах чувствительность Sуменьшается, что может быть обусловлено наличием упругости, массы, паразитных емкостей и т. д. Поэтому такие датчики называют датчиками квазинулевого порядка. Примером такого датчика может являться реостатный датчик смещения (перемещения).
Датчики, содержащие один энергонакопительный элемент, описываются дифференциальным уравнением первого порядка
. (4.5)
Примером датчика первого порядка является терморезистивный датчик, в котором роль энергонакопительного элемента играет теплоемкость. Для описания динамических характеристик данных датчиков широко используются амплитудно-частотные и фазочастотные характеристики, граничная частота fСР, на которой выходной сигнал уменьшается на 3 дБ. Эта частота считается предельной рабочей частотой датчика и называетсячастотой среза. Она характеризует наибольшую или наименьшую частоту внешних воздействий (входной величины), которую датчик может воспринять без искажений [20].
При подаче на вход датчика первого порядка ступенчатого воздействия его переходная характеристика хорошо аппроксимируется экспонентой вида

, (4.6)
где Y0– установившееся значение выходного сигнала; τ – постоянная времени;t– время.
Постоянная времениτ – это время, в течение которого выходной сигнал датчика достигает уровня, составляющего приблизительно 63 % от установившегося значения при подаче на его вход ступенчатого внешнего воздействия. Постоянная времени является мерой инерционности датчика и в терминах электрических величин находится как τ =C . R. В тепловых терминах под С иRпонимаются теплоемкость и тепловое сопротивление.
На практике для установления τ или fдатчиков первого порядка можно использовать формулу [20]fСР= 0,159/τ.
Датчики, содержащие два энергонакопительных элемента, описываются дифференциальным уравнением второгопорядка

. (4.7)
Примером датчика второго порядка является акселерометр, в котором роль энергонакопительных элементов играют масса и пружина.
При подаче на вход датчика второго порядка ступенчатого воздействия на его выходе практически всегда появляются колебания. Любой датчик второго порядка характеризуется собственной (резонансной) частотой, на которой происходит значительное увеличение выходного сигнала. Обычно рабочий диапазон датчиков выбирается либо значительно ниже собственной частоты (на 60 % и более), либо выше ее, кроме тех датчиков, для которых резонансная частота является рабочей. Для датчиков второго порядка необходимо указывать значение собственной частоты и егокоэффициент затухания, который может быть определен как отношение большей амплитуды к меньшей амплитуде пары последовательно взятых полуволн колебаний относительно установившегося значения.
Кроме метрологических характеристик при эксплуатации средств измерения важно знать и неметрологические характеристики: показатели надежности, электрическую прочность, сопротивление изоляции, устойчивость к климатическим и механическим воздействиям, время установления рабочего режима, экономичность и др.
ПЕРВИЧНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Измерительный преобразователь, к которому подведена измеряемая величина, т.е. первый в измерительной цепи (5.1.21).
Примеры. Термопара в цепи термоэлектрического термометра, сужающее устройство расходомера
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [15], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [13], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [6], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [6], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [7], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
МИ 2247-93 [13], п. 5.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [14], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [18], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
МИ 2247-93 [13], п. 5.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [7], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
МИ 2247-93 [9], п. 5.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [5], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [12], п. 6.18
Первичный измерительный преобразователь
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы)
title=»ГСИ. Метрология. Основные термины и определения» [13], п. 6.18
3.6 первичный измерительный преобразователь: Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина.
3.2 первичный измерительный преобразователь (sensor): Измерительный преобразователь, на который непосредственно воздействует явление, физический объект или вещество, являющееся носителем величины, подлежащей измерению.
Примеры
1 Чувствительная катушка платинового термометра сопротивления.
2 Ротор турбинного расходомера.
3 Трубка Бурдона в манометре.
4 Фотоэлемент спектрометра.
5 Термотропный жидкий кристалл, который изменяет цвет в зависимости от температуры.
Смотри также родственные термины:
Первичный измерительный преобразователь метеовеличины (датчик) — измерительный преобразователь метеовеличины, стоящий первым в измерительной цепи.
Словарь-справочник терминов нормативно-технической документации . academic.ru . 2015 .
- Первичный излучатель антенны
- Первичный измерительный преобразователь метеовеличины (датчик)
Полезное
Смотреть что такое «ПЕРВИЧНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ» в других словарях:
- первичный измерительный преобразователь — первичный преобразователь ПИП Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы). Примечание. В одном … Справочник технического переводчика
- первичный измерительный преобразователь — keitlys statusas T sritis Standartizacija ir metrologija apibrėžtis Įtaisas, keičiantis vienos rūšies signalo energiją kita rūšimi. atitikmenys: angl. transducer vok. Messumformer, m; Messwandler, m rus. измерительный преобразователь, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
- первичный измерительный преобразователь — keitlys statusas T sritis Standartizacija ir metrologija apibrėžtis Įtaisas, reaguojantis į reiškinį ir kuriantis signalą, kuris yra vienos ar kelių šio reiškinio charakteristikų funkcija. atitikmenys: angl. transducer vok. Messumformer, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
- первичный измерительный преобразователь — keitlys statusas T sritis fizika atitikmenys: angl. transducer vok. Meßumformer, m; Meßwandler, m rus. измерительный преобразователь, m; первичный измерительный преобразователь, m pranc. transducteur, m … Fizikos terminų žodynas
- первичный измерительный преобразователь — jutiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Matavimo priemonės arba matavimo grandinės dalis, kurią tiesiogiai veikia matuojamasis dydis ir kuri kuria signalą, susijusį su matuojamojo dydžio verte. pavyzdys( iai) a)… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
- первичный измерительный преобразователь — jutiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Matavimo priemonės jautrusis elementas, tiesiogiai reaguojantis į ieškomojo sando kiekį ar parametro vertę. atitikmenys: angl. detecting element; primary detector; primary… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
- первичный измерительный преобразователь — jutiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Pirminis keitiklis (jautrusis elementas), kurio įėjime veikia matuojamasis dydis. atitikmenys: angl. detecting element; primary detector; primary measuring transducer; sensing… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
- первичный измерительный преобразователь — jutiklis statusas T sritis fizika atitikmenys: angl. primary measuring transducer; sensing element; sensor vok. Aufnehmer, m; Meßfühler, m; Meßgrößenaufnehmer, m rus. первичный датчик, m; первичный измерительный преобразователь, m; чувствительный … Fizikos terminų žodynas
- Первичный измерительный преобразователь метеовеличины (датчик) — измерительный преобразователь метеовеличины, стоящий первым в измерительной цепи. Источник … Словарь-справочник терминов нормативно-технической документации
- датчик, первичный (измерительный) преобразователь — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN transmitter … Справочник технического переводчика
- Обратная связь: Техподдержка, Реклама на сайте
- �� Путешествия
Экспорт словарей на сайты, сделанные на PHP,
WordPress, MODx.
- Пометить текст и поделитьсяИскать в этом же словареИскать синонимы
- Искать во всех словарях
- Искать в переводах
- Искать в ИнтернетеИскать в этой же категории
2.4. Первичные измерительные преобразователи
Первичные ИПр являются наиболее ответственными элементами приборов и систем. Они в наибольшей степени подвержены влиянию объекта измерений и окружающей среды. Поэтому в первую очередь нуждаются в защите от нежелательных воздействий. Метрологические характеристики первичных ИПр оказывают наиболее сильное влияние на точность создаваемых ИУ. Поэтому выбор или проектирование первичных ИПр требуют особого внимания.
Первичные ИПр делят на группы преобразователей, отличающихся физическим принципом действия: механические, электрические, оптические, тепловые, магнитные, электромагнитные, оптико-электронные и др . Каждая такая группа содержит множество разных ИПр, отличающихся конструкцией, способом применения, характеристиками и пр. Например, к группе электромагнитных ИПр относятся трансформаторные, индуктивные, индукционные, магнитоэлектрические, магнитомодуляционные, вихретоковые и др. [16, 31].
Измеряемые величины, в свою очередь, делят на группы однородных физических величин: геометрических, линейно-угловых, кинематических, теплотехнических, световых, высотно-скоростных, электрофизических и др. Например, в группу теплотехнических величин входят: давление, температура, сила, момент, расход, уровень, плотность и концентрация веществ .
Каждому ИПр присуща естественная физическая величина, которая лучше всего воспринимается на фоне остальных влияющих величин. Для измерения других физических величин используют различные предварительные преобразователи, с помощью которых измеряемая величина преобразуется в естественную (для данного ИПр) физическую величину. В качестве примера на рис. 2.9 показаны схемы индуктивных ИУ для измерения давления  (рис. 2.9,а), ускорения
(рис. 2.9,а), ускорения  (рис. 2.9,б) и силы
(рис. 2.9,б) и силы  (рис. 2.9,в).
(рис. 2.9,в).

Предварительными преобразователями (и чувствительными элементами) в них являются, соответственно, мембрана 1, инерционная масса 2 и упругий элемент (кольцо) 3. Перемещение этих элементов воспринимается индуктивным измерительным преобразователем перемещения ИПр. Для него перемещение является естественной физической величиной. Такой преобразователь содержится в любом индуктивном приборе, но может иметь разные конструкцию и характеристики [29].
В табл. 2.2 для наиболее распространенных видов первичных ИПр символом ¤ обозначена их естественная физическая величина, символом × — величина, для измерения которой (с помощью данного ИПр) необходим предварительный преобразователь, символом * — генераторный ИПр, символом # — параметрический ИПр, а символом ® — радиационный ИПр.
Функциональные возможности первичных ИПр.
Измеряемая физическая величина
С о п р о т и в л е н и я п л е ч м о с т аТип#פ××Тензорезисторный#¤××××Потенциометрический#פ×××Трансформаторный*פ××××Индуктивный#פ×××ИндукционныйРасходСкоростьУскорениеВибрацияТемператураМагнитный потокСвето-
Видно, что многие ИПр пригодны для измерения нескольких физических величин. Cохранение метрологических характеристик соответствующих ИУ требует особого внимания к выбору предварительного преобразователя, так как погрешность этого преобразователя часто оказывается доминирующей, сводя на нет достоинства используемого ИПр .
Главными требованиями при выборе и проектировании первичных ИПр являются:
Схема равноплечего моста с одним ИПр (РПМ1) применяется редко из-за существенной нелинейности статической характеристики и больших инструментальных погрешностей соответствующего ИУ. Эти недостатки отсутствуют при использовании схем с дифференциальными преобразователями (ПОСМ и ПРСМ). Параллельно-симметричная схема отличается от последовательно-симметричной схемы тем, что в ней допускается использование низкоомных ИПр, у которых . Применение таких ИПр в схеме ПОСМ может приводить к шунтированию источника питания. Схема РПМ4 содержит четыре дифференциально включенных ИПр и обеспечивает наибольшую чувствительность ИУ. Для сопротивлений пассивных плеч моста и сопротивления нагрузки принимается соответственно и , где — постоянные положительные числа. Случай соответствует равноплечему мосту, случай — работе моста в режиме холостого хода, случай — работе моста в режиме короткого замыкания, случай , — выделению максимальной мощности сигнала в измерительной диагонали моста. В табл. 2.4 приведены такие значения параметров и . Таблица 2.4. Согласованные параметры мостовых схем
| Тип моста | Выходной параметр источника питания | |||
| Напряжение | Ток | |||
| РПМ | 1 | 1 | 1 | 1 |
| ПОСМ | ||||
| ПРСМ | ||||

Условиями экстремума мощности для моста типа ПОСМ являются равенства и . Точное выполнение этих равенств невозможно из-за ограничений, наложенных на мощность источника питания моста и тепловую мощность рассеяния ИПр. Поэтому значения параметров для этого моста, указанные в табл. 2.4, являются условными. Ток в измерительной диагонали моста пропорционален напряжению источника питания и зависит от сопротивлений плеч моста , (2.16) где . Обычно внутренним сопротивлением источника питания пренебрегают, полагая . В этом случае вместо (2.16) можно записать . (2.17) Если мост питается от источника тока, то, напротив, . В этом случае , (2.18) где — ток питания моста. Во всех случаях напряжение в измерительной диагонали моста равно . (2.19) Если относительные изменения сопротивлений плеч моста незначительные (т.е., если ), то в первом (линейном) приближении можно записать , (2.20) где — постоянный коэффициент, характеризующий асимметрию плеч моста, — номинальное значение го сопротивления; — чувствительность моста. В этом случае мостовую измерительную схему можно рассматривать в качестве суммирующего или сравнивающего элементов (в зависимости от знаков слагаемых). Чувствительность моста зависит только от величины напряжения питания и соотношения сопротивлений плеч моста (коэффициента ). Чувствительность равноплечего моста (у которого ) максимальна. Отклонения коэффициента от оптимального значения в 1,5 – 2 раза несущественны, так как на границах интервала снижение чувствительности моста не превышает 4% от максимального значения . Резкое снижение чувствительности происходит только при . Выбор напряжения питания зависит от необходимой величины выходного сигнала схемы включения и допустимой мощности рассеяния используемых ИПр. Мостовая СВ и ИПр образуют мостовое ИУ, с помощью которого измеряемая физическая величина преобразуется в изменение напряжения или тока . В зависимости от режима работы моста и вида источника питания статическая характеристика такого ИУ описывается одной из четырех функций [30] , , , , (2.21) где — напряжение или ток в измерительной диагонали моста; — постоянные коэффициенты, зависящие от параметров мостового ИУ. На рис. 2.11 показаны графики этих функций: на рис. 2.11,а — для случая , на рис. 2.11,б – для случая . Рис. 2.11. Пунктиром показаны аппроксимирующие прямые (прямые наименьших модулей). При правильном выборе их параметров максимальная приведенная погрешность от нелинейности статической характеристики ИУ является минимальной. Эта погрешность зависит только от произведения и вычисляется по формулам, приведенным в табл. 2.5. Расчеты по этим формулам показывают, что погрешность от нелинейности статических характеристик мостовых ИУ с одиночными ИПр значительно превышает погрешность от нелинейности статических характеристик ИУ с дифференциальными ИПр [30]. Таблица 2.5. Погрешность от нелинейности статических характеристик мостовых ИУ
| № п/п | Функция преобразования | Диапазон измерений | |
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
В таблице 2.6 приведены схемы мостовых ИУ, их статические характеристики и формулы, связывающие значения коэффициентов этих характеристик с параметрами ИУ для случая, когда мост работает в режиме заданного напряжения (питается от источника напряжения). Считается, что во всех случаях используемые ИПр имеют линейные статические характеристики (2.13), а информативным параметром выходного сигнала схемы включения является напряжение в измерительной диагонали моста. Таблица 2.6. Статические характеристики мостовых ИУ
| Тип моста | Схема моста | Статическая характеристика | Значения коэффициентов | |
| РПМ1 |  |
|||
| ПОСМ | ||||
| ПРСМ | ||||
| РПМ4 | ||||
Если известны желаемое значение коэффициента наклона аппроксимирующей прямой (т.е. желаемое значение средней чувствительности ИУ ) и допустимая погрешность от нелинейности статической характеристики ИУ (2.21) , то необходимые значения коэффициентов этой характеристики можно вычислить по формулам, приведенным в табл. 2.7. Таблица 2.7. Оптимальные значения параметров статических характеристик мостовых ИУ
| № п/п | Функция преобразования | Диапазон измерений | |||
| 1 | 1 | — | 1 | — | |
| 2 | |||||
| 3 | |||||
| 4 | |||||
С их помощью можно выбрать тип моста и определить его параметры, обеспечивающие получение желаемой статической характеристики мостового ИУ. При этом должны приниматься во внимание конструктивные, технологические и иные ограничения [30]. Максимальную чувствительность и линейную статическую характеристику имеет мост РПМ4, работающий в режиме холостого хода. Также линейными являются характеристики мостов ПРСМ и РПМ4, работающих в режиме заданного тока. В ряде случаев не сопротивление , а проводимость ИПр линейно связана с измеряемой величиной, т.е. вместо (2.9) имеет место зависимость . (2.22) В этих случаях линейную статическую характеристику имеют мосты ПОСМ и РПМ4, работающие в режиме заданного напряжения [30]. При отклонении параметров мостовых ИУ от номинальных значений появляется инструментальная погрешность. Обычно эта погрешность связана с изменением температуры окружающей среды. В этом случае вместо (2.9) следует записать , (2.23) где — начальное сопротивление и коэффициент относительной чувствительности ИПр, вычисленные с учетом фактического значения температуры окружающей среды . В первом (линейном) приближении их можно вычислить по формулам , , (2.24) где — температурные коэффициенты величин и : , ; (2.25) — отклонение температуры от нормальной температуры . Окончательно при вместо (2.9) получаем . (2.26) Подставляя (2.26) в формулы (2.16) – (2.19), можно для каждого из рассматриваемых мостовых ИУ найти абсолютную температурную погрешность , (2.27) где — выходное напряжение моста, вычисленное с учетом фактического значения температуры окружающей среды; — то же для нормальной температуры окружающей среды. Приведем результаты такого анализа [30]. Температурная погрешность РПМ1, работающего в режиме заданного напряжения, практически не зависит от текущего значения измеряемой величины и в первом приближении вычисляется по формуле , (2.28) т.е. является аддитивной погрешностью. Температурная погрешность мостов с дифференциальными ИПр (ПОСМ, ПРСМ и РПМ4) является мультипликативной (пропорциональной ). В первом приближении ее можно вычислить по формуле , (2.29) где значения коэффициентов берутся из табл. 2.4. Например, абсолютная температурная погрешность моста РПМ4 вычисляется по формуле . (2.30) Для моста ПРСМ вместо (2.29) нужно записать . (2.31) Максимальная приведенная температурная погрешность мостовых ИУ, показанных в табл. 2.6, равна (2.32) Температурная погрешность моста РПМ1 более чем на порядок превышает температурную погрешность мостов, имеющих дифференциальные преобразователи. Условием компенсации их температурной погрешности являются равенства и . (2.33) Другим способом уменьшения мультипликативной температурной погрешности мостовых ИУ является подключение в цепь источника питания компенсационного резистора , величина которого зависит от температуры окружающей среды [31]. В этом случае температурное изменение чувствительности ИУ парируется изменением напряжения питания моста . При производственно – технологических отклонениях параметров мостовых ИУ также появляются инструментальные погрешности, зависящие от номинального значения сопротивления ИПр . Для их уменьшения используется различные регулировки, способствующие выполнению условия (2.15), включение в схему моста калибровочных резисторов и пр. С помощью мостов Уитстона, работающих в нормальных условиях, приемлемые результаты получаются в диапазоне от 100 Ом до 100 кОм [15]. Для преобразования малых сопротивлений (до 10 Ом) применяют двойные (шестиплечие) и другие мосты: Т – образные, мосты Баттерворта, Андерсона, Ремингтона и др. Для емкостных и индуктивных ИПр, имеющих реактивное сопротивление, применяют мосты переменного тока. В этом случае в качестве вторичного прибора используют фазочувствительные указатели [31]. Для устранения нелинейности статической характеристики мостовой схемы применяют самобалансирующиеся мосты , называемые также мостовыми усилителями (рис. 2.12). В них используются операционные усилители (ОУ) с глубокой отрицательной обратной связью. В схеме рис. 2.12, а для ОУ, включенного в измерительную диагональ моста, выполняется условие квазинуля ( ) . В этом случае выходное напряжение ОУ пропорционально относительному изменению сопротивления ИПр . В схеме на рис. 2.12, б достигается дополнительное усиление сигнала по напряжению за счет установки в цепь отрицательной обратной связи ОУ Т-образного эквивалента большого сопротивления. 2.5.2. Схемы включения с выходным частотно-модулированным сигналом С помощью схем включения с частотно-модулированным выходным сигналом (ЧСВ) выходная величина параметрического ИПр (активное сопротивление , емкость или индуктивность ) преобразуется в частоту электрического сигнала . Такие схемы включения можно считать разновидностью электромагнитных частотных измерительных преобразователей. Они имеют существенные преимущества перед рассмотренными ранее амплитудными схемами включения (АСВ). Главным из них является частотная форма выходного сигнала. 
 Рис. 2.12. На рис. 2.13, б показан пример такого сигнала для случая, когда измеряемая величина за время увеличивается до значения , а затем за такое же время уменьшается до нуля (рис. 2.13, а). На рис. 2.13, в показан соответствующий выходной сигнал АСВ. Информативным параметром выходного сигнала ЧСВ является мгновенная частота , или период , зависящие от измеряемой величины и связанные друг с другом соотношением . Последующие преобразования такого сигнала с целью получения результата измерений могут выполняться практически без погрешностей. Это стало возможным благодаря несомненным успехам отечественного приборостроения в области цифровой обработки сигналов.
Рис. 2.12. На рис. 2.13, б показан пример такого сигнала для случая, когда измеряемая величина за время увеличивается до значения , а затем за такое же время уменьшается до нуля (рис. 2.13, а). На рис. 2.13, в показан соответствующий выходной сигнал АСВ. Информативным параметром выходного сигнала ЧСВ является мгновенная частота , или период , зависящие от измеряемой величины и связанные друг с другом соотношением . Последующие преобразования такого сигнала с целью получения результата измерений могут выполняться практически без погрешностей. Это стало возможным благодаря несомненным успехам отечественного приборостроения в области цифровой обработки сигналов.  Рис. 2.13. В настоящее время известно большое число различных ЧСВ. Однако на практике чаще применяют схемы с частотно-зависимыми цепями, компенсационные и интегрирующие схемы [30]. Наиболее распространенными из них являются схемы с частотно-зависимой цепью (ЧЗЦ). Такие цепи представляют собой пассивный четырехполюсник Г-образного, Т-образного или лестничного типов, содержащий параметрический ИПр. В зависимости от состава элементов ЧЗЦ различают , и генераторы. генераторы относятся к классу резонаторных ЧСВ. В них применяют ЧЗЦ с параллельным контуром, содержащим емкостной или индуктивный ИПр. Генераторы и типов являются преобразователями с апериодическими контурами. В них чаще используются омические ИПр. Рассмотрим работу частотной схемы включения на примере генератора с Г- образной ЧЗЦ (рис. 2.14, а). На рис. 2.14, б показана полная схема такого генератора. Его называют генератором с мостом Вина.
Рис. 2.13. В настоящее время известно большое число различных ЧСВ. Однако на практике чаще применяют схемы с частотно-зависимыми цепями, компенсационные и интегрирующие схемы [30]. Наиболее распространенными из них являются схемы с частотно-зависимой цепью (ЧЗЦ). Такие цепи представляют собой пассивный четырехполюсник Г-образного, Т-образного или лестничного типов, содержащий параметрический ИПр. В зависимости от состава элементов ЧЗЦ различают , и генераторы. генераторы относятся к классу резонаторных ЧСВ. В них применяют ЧЗЦ с параллельным контуром, содержащим емкостной или индуктивный ИПр. Генераторы и типов являются преобразователями с апериодическими контурами. В них чаще используются омические ИПр. Рассмотрим работу частотной схемы включения на примере генератора с Г- образной ЧЗЦ (рис. 2.14, а). На рис. 2.14, б показана полная схема такого генератора. Его называют генератором с мостом Вина.  а б Рис. 2.14. ЧЗЦ включается в цепь положительной обратной связи усилителя (ПОС). Коэффициент передачи ЧЗЦ зависит от частоты
а б Рис. 2.14. ЧЗЦ включается в цепь положительной обратной связи усилителя (ПОС). Коэффициент передачи ЧЗЦ зависит от частоты  выходного сигнала . С целью стабилизации коэффициента усиления усилителя он охватывается глубокой частотно — независимой отрицательной обратной связью (ООС) с коэффициентом передачи . Из рис. 2.14 следует операционное уравнение , (2.34) где , — передаточные функции ЧЗЦ и усилителя. Полагая в этом уравнении , получим условия, при выполнении которых сигнал на выходе усилителя имеет частоту
выходного сигнала . С целью стабилизации коэффициента усиления усилителя он охватывается глубокой частотно — независимой отрицательной обратной связью (ООС) с коэффициентом передачи . Из рис. 2.14 следует операционное уравнение , (2.34) где , — передаточные функции ЧЗЦ и усилителя. Полагая в этом уравнении , получим условия, при выполнении которых сигнал на выходе усилителя имеет частоту  , , (2.35) , (2.36) где , — фазо-частотные характеристики ЧЗЦ и усилителя; , — амплитудно-частотные характеристики ЧЗЦ и усилителя. Условие (2.35) называется балансом фаз, а условие (2.36) — балансом амплитуд. Любое изменение фазовых сдвигов и приводит к изменению частоты генерируемых колебаний
, , (2.35) , (2.36) где , — фазо-частотные характеристики ЧЗЦ и усилителя; , — амплитудно-частотные характеристики ЧЗЦ и усилителя. Условие (2.35) называется балансом фаз, а условие (2.36) — балансом амплитуд. Любое изменение фазовых сдвигов и приводит к изменению частоты генерируемых колебаний  и именно таким образом, чтобы условие (2.35) сохраняло силу. Частота , на которой это условие выполняется, называется частотой квазирезонанса. Значение коэффициента передачи ЧЗЦ зависит от частоты
и именно таким образом, чтобы условие (2.35) сохраняло силу. Частота , на которой это условие выполняется, называется частотой квазирезонанса. Значение коэффициента передачи ЧЗЦ зависит от частоты  . Поэтому для выполнения баланса амплитуд (2.36) в генераторе необходимо предусмотреть возможность автоматического изменения коэффициента передачи цепи ООС
. Поэтому для выполнения баланса амплитуд (2.36) в генераторе необходимо предусмотреть возможность автоматического изменения коэффициента передачи цепи ООС или коэффициента усиления усилителя . Для этого в цепь ООС включают нелинейное сопротивление так, как показано на рис. 2.14, где в качестве этого сопротивления используется термистор . Им может быть лампа накаливания, у которой сопротивление нити накала зависит от протекающего по ней тока. С ростом амплитуды выходного сигнала сопротивление увеличивается, что приводит к уменьшению коэффициента передачи цепи ООС
или коэффициента усиления усилителя . Для этого в цепь ООС включают нелинейное сопротивление так, как показано на рис. 2.14, где в качестве этого сопротивления используется термистор . Им может быть лампа накаливания, у которой сопротивление нити накала зависит от протекающего по ней тока. С ростом амплитуды выходного сигнала сопротивление увеличивается, что приводит к уменьшению коэффициента передачи цепи ООС  . В результате амплитуда выходного сигнала снижается и устанавливается на таком уровне, при котором условие (2.36) выполняется. Температура нити , а следовательно и сопротивление лампы накаливания практически не изменяются за время, равное периоду колебаний . Поэтому такой элемент называют инерционно нелинейным . К инерционно нелинейным элементам можно также отнести оптрон, состоящий из лампы накаливания и фотосопротивления. В генераторах без специального нелинейного элемента в цепи ООС ограничение амплитуды выходного сигнала происходит за счет естественной или специально созданной нелинейности амплитудной характеристики усилителя. В этом случае форма выходного сигнала усилителя может отличаться от синусоидальной. Для устранения этого недостатка применяют специальные схемы автоматической регулировки коэффициента усиления усилителя (АРУ). Основными характеристиками ЧЗЦ являются: передаточная функция , комплексная частотная характеристика , частота квазирезонанса , коэффициент затухания и добротность . Рассмотрим эти характеристики. Передаточная функция ЧЗЦ Передаточная функция ЧЗЦ определяется как отношение изображений по Лапласу сигналов на входе и выходе ЧЗЦ, т.е. . (2.37) В рассматриваемом случае имеем (см. рис. 2.14, а) , где , , , , , т.е. . (2.38) Если какой либо параметр ЧЗЦ зависит от измеряемой величины
. В результате амплитуда выходного сигнала снижается и устанавливается на таком уровне, при котором условие (2.36) выполняется. Температура нити , а следовательно и сопротивление лампы накаливания практически не изменяются за время, равное периоду колебаний . Поэтому такой элемент называют инерционно нелинейным . К инерционно нелинейным элементам можно также отнести оптрон, состоящий из лампы накаливания и фотосопротивления. В генераторах без специального нелинейного элемента в цепи ООС ограничение амплитуды выходного сигнала происходит за счет естественной или специально созданной нелинейности амплитудной характеристики усилителя. В этом случае форма выходного сигнала усилителя может отличаться от синусоидальной. Для устранения этого недостатка применяют специальные схемы автоматической регулировки коэффициента усиления усилителя (АРУ). Основными характеристиками ЧЗЦ являются: передаточная функция , комплексная частотная характеристика , частота квазирезонанса , коэффициент затухания и добротность . Рассмотрим эти характеристики. Передаточная функция ЧЗЦ Передаточная функция ЧЗЦ определяется как отношение изображений по Лапласу сигналов на входе и выходе ЧЗЦ, т.е. . (2.37) В рассматриваемом случае имеем (см. рис. 2.14, а) , где , , , , , т.е. . (2.38) Если какой либо параметр ЧЗЦ зависит от измеряемой величины  , то соответствующий коэффициент передаточной функции ЧЗЦ ( или ) также зависят от
, то соответствующий коэффициент передаточной функции ЧЗЦ ( или ) также зависят от  . Комплексная частотная характеристика ЧЗЦ Подставляя в (2.38) , получаем комплексную частотную характеристику ЧЗЦ , (2.39) где — комплексные амплитуды напряжений на входе и выходе ЧЗЦ; — модуль и аргумент комплексной частотной характеристики;
. Комплексная частотная характеристика ЧЗЦ Подставляя в (2.38) , получаем комплексную частотную характеристику ЧЗЦ , (2.39) где — комплексные амплитуды напряжений на входе и выходе ЧЗЦ; — модуль и аргумент комплексной частотной характеристики;  — действительная и мнимая части этой характеристики. Для Г — образной ЧЗЦ имеем , (2.40) (2.41) Частота квазирезонанса Частотой квазирезонанса называется такое значение частоты выходного сигнала ЧСВ , при котором напряжение на выходе ЧЗЦ находится в фазе с напряжением на ее входе. Такое значение частоты можно найти из условия баланса фаз (2.35). Если , то для определения нужно решить уравнение . (2.42) Для Г — образной ЧЗЦ из этого уравнения получаем (см. (2.41)) . (2.43) В этом случае в качестве ИПр можно использовать омический ( ) или емкостной ( ) преобразователи. Коэффициент передачи ЧЗЦ (2.40) на частоте квазирезонанса максимален. Коэффициент затухания ЧЗЦ Коэффициент затухания представляет собой величину, обратную модулю коэффициента передачи ЧЗЦ на частоте квазирезонанса, т.е. . (2.44) Из условия баланса амплитуд (2.36) можно получить , где — значение коэффициента усиления усилителя на частоте квазирезонанса. Следовательно, коэффициент затухания ЧЗЦ определяет такое значение коэффициента усиления усилителя, которое соответствует стационарному режиму автоколебаний. Для Г — образной ЧЗЦ . Добротность ЧЗЦ Добротность характеризует наклон фазо — частотной характеристики ЧЗЦ в окрестности точки и вычисляется по формуле. (2.45) При нарушении баланса фаз (2.35) относительное изменение частоты автоколебаний, обусловленное появлением в контуре автогенератора дополнительных фазовых сдвигов , обратно пропорционально добротности ЧЗЦ . (2.46) Поэтому чем выше добротность ЧЗЦ
— действительная и мнимая части этой характеристики. Для Г — образной ЧЗЦ имеем , (2.40) (2.41) Частота квазирезонанса Частотой квазирезонанса называется такое значение частоты выходного сигнала ЧСВ , при котором напряжение на выходе ЧЗЦ находится в фазе с напряжением на ее входе. Такое значение частоты можно найти из условия баланса фаз (2.35). Если , то для определения нужно решить уравнение . (2.42) Для Г — образной ЧЗЦ из этого уравнения получаем (см. (2.41)) . (2.43) В этом случае в качестве ИПр можно использовать омический ( ) или емкостной ( ) преобразователи. Коэффициент передачи ЧЗЦ (2.40) на частоте квазирезонанса максимален. Коэффициент затухания ЧЗЦ Коэффициент затухания представляет собой величину, обратную модулю коэффициента передачи ЧЗЦ на частоте квазирезонанса, т.е. . (2.44) Из условия баланса амплитуд (2.36) можно получить , где — значение коэффициента усиления усилителя на частоте квазирезонанса. Следовательно, коэффициент затухания ЧЗЦ определяет такое значение коэффициента усиления усилителя, которое соответствует стационарному режиму автоколебаний. Для Г — образной ЧЗЦ . Добротность ЧЗЦ Добротность характеризует наклон фазо — частотной характеристики ЧЗЦ в окрестности точки и вычисляется по формуле. (2.45) При нарушении баланса фаз (2.35) относительное изменение частоты автоколебаний, обусловленное появлением в контуре автогенератора дополнительных фазовых сдвигов , обратно пропорционально добротности ЧЗЦ . (2.46) Поэтому чем выше добротность ЧЗЦ  , тем больше стабильность частоты выходного сигнала. Для Г — образной ЧЗЦ получаем . (2.47) В частности, если (т.е. ) и (т.е. ), то . Добротность
, тем больше стабильность частоты выходного сигнала. Для Г — образной ЧЗЦ получаем . (2.47) В частности, если (т.е. ) и (т.е. ), то . Добротность  цепей превышает добротность
цепей превышает добротность и
и цепей, но она значительно меньше добротности механических резонаторов. Поэтому частотные датчики с механическими резонаторами, обладают более стабильными характеристиками, чем электромагнитные преобразователи [29]. Определим статическую характеристику преобразователя с мостом Вина. Будем считать, что в рабочем диапазоне частот ИПр выполняется условие , т.е. фазы сигналов на входе и выходе усилителя совпадают друг с другом. В этом случае частота выходного сигнала равна частоте квазирезонанса, т.е. . (2.48) Если в качестве ИПр используется омический преобразователь с линейной статической характеристикой , то , (2.49) где — постоянные коэффициенты, зависящие от параметров ИПр , . Таким образом, каждому значению измеряемой величины
цепей, но она значительно меньше добротности механических резонаторов. Поэтому частотные датчики с механическими резонаторами, обладают более стабильными характеристиками, чем электромагнитные преобразователи [29]. Определим статическую характеристику преобразователя с мостом Вина. Будем считать, что в рабочем диапазоне частот ИПр выполняется условие , т.е. фазы сигналов на входе и выходе усилителя совпадают друг с другом. В этом случае частота выходного сигнала равна частоте квазирезонанса, т.е. . (2.48) Если в качестве ИПр используется омический преобразователь с линейной статической характеристикой , то , (2.49) где — постоянные коэффициенты, зависящие от параметров ИПр , . Таким образом, каждому значению измеряемой величины  соответствует определенное значение частоты выходного сигнала преобразователя . В работе автора [29] подробно рассмотрен расчет погрешности от нелинейности и инструментальных погрешностей ИУ с такой статической характеристикой. 2.6. Автоматические измерительные приборы Высокую точность измерений обеспечивают автоматические измерительные приборы (АИП). В них измеряемая величина непосредственно или косвенно сравнивается с мерой, которая хранится в приборе или воспроизводится в нем с помощью отрицательной обратной связи. Это сравнение происходит автоматически, т.е. без участия человека. Различают АИП с астатическим и статическим уравновешиванием. Отличие этих приборов определяется значением сигнала рассогласования в установившемся статическом режиме измерений. Для астатических АИП этот сигнал равен нулю, для статических – отличен от нуля. Различают также приборы компенсационного и следящего уравновешивающего преобразования. В них отличительным признаком является глубина охвата звеньев прибора отрицательной обратной связью. На рис. 2.15, а показана схема прибора с астатическим уравновешиванием. В нем обратная связь заводится на мостовую схему. Мост содержит омический ИПр , два резистора и потенциометр П, сопротивление которого зависит от перемещения его щетки. При изменении сопротивления ИПр нарушается равновесное состояние моста и в его измерительной диагонали появляется напряжение , зависящее от степени разбаланса. Будучи усиленным, это напряжение поступает в управляющую обмотку двигателя Д, вал которого связан с отсчетным устройством ОУ и с щеткой реохорда (с помощью кинематической передачи КП). При вращении вала изменяется сопротивление потенциометра , что приводит к восстановлению состояния равновесия моста. Соответствующее показание прибора считывается со шкалы ОУ.
соответствует определенное значение частоты выходного сигнала преобразователя . В работе автора [29] подробно рассмотрен расчет погрешности от нелинейности и инструментальных погрешностей ИУ с такой статической характеристикой. 2.6. Автоматические измерительные приборы Высокую точность измерений обеспечивают автоматические измерительные приборы (АИП). В них измеряемая величина непосредственно или косвенно сравнивается с мерой, которая хранится в приборе или воспроизводится в нем с помощью отрицательной обратной связи. Это сравнение происходит автоматически, т.е. без участия человека. Различают АИП с астатическим и статическим уравновешиванием. Отличие этих приборов определяется значением сигнала рассогласования в установившемся статическом режиме измерений. Для астатических АИП этот сигнал равен нулю, для статических – отличен от нуля. Различают также приборы компенсационного и следящего уравновешивающего преобразования. В них отличительным признаком является глубина охвата звеньев прибора отрицательной обратной связью. На рис. 2.15, а показана схема прибора с астатическим уравновешиванием. В нем обратная связь заводится на мостовую схему. Мост содержит омический ИПр , два резистора и потенциометр П, сопротивление которого зависит от перемещения его щетки. При изменении сопротивления ИПр нарушается равновесное состояние моста и в его измерительной диагонали появляется напряжение , зависящее от степени разбаланса. Будучи усиленным, это напряжение поступает в управляющую обмотку двигателя Д, вал которого связан с отсчетным устройством ОУ и с щеткой реохорда (с помощью кинематической передачи КП). При вращении вала изменяется сопротивление потенциометра , что приводит к восстановлению состояния равновесия моста. Соответствующее показание прибора считывается со шкалы ОУ.  Рис.2.15. На рис. 2.15, б показана схема аналогичного прибора со статическим уравновешиванием. Он отличается тем, что вместо двигателя Д в нем используется магнитоэлектрический преобразователь МЭП. При протекании по обмотке этого преобразователя тока якорь МЭП, выполненный из постоянного магнита, втягивается внутрь обмотки, перемещая щетку потенциометра П. Приборы, показанные на рис. 2.15, можно использовать для измерения температуры контролируемой среды. В этом случае роль омического ИПр выполняет терморезистор (аналогичный рассмотренному в разделе 3.3, см. рис. 3.3, а). Если используется емкостной или индуктивный ИПр, то мост должен питаться от источника переменного напряжения. Аналогичные схемы и принцип действия имеют различные ИУ с обратной связью: маятниковые акселерометры, гироскопические датчики, пневматические системы передачи информации, токовые весы, буйковые уровнемеры и пр. На рис. 2.16, а показана обобщенная функциональная схема таких ИУ. На этом рисунке ИЭ – исполнительный элемент, роль которого в приборах с астатическим уравновешиванием выполняет двигатель Д, а в приборах со статическим уравновешиванием – МЭП. На рис. 2.16, б показана линеаризованная структурная схема автоматических приборов. Ее можно использовать для оценки работы приборов в динамическом режиме измерений, когда измеряемая величина изменяется во времени.
Рис.2.15. На рис. 2.15, б показана схема аналогичного прибора со статическим уравновешиванием. Он отличается тем, что вместо двигателя Д в нем используется магнитоэлектрический преобразователь МЭП. При протекании по обмотке этого преобразователя тока якорь МЭП, выполненный из постоянного магнита, втягивается внутрь обмотки, перемещая щетку потенциометра П. Приборы, показанные на рис. 2.15, можно использовать для измерения температуры контролируемой среды. В этом случае роль омического ИПр выполняет терморезистор (аналогичный рассмотренному в разделе 3.3, см. рис. 3.3, а). Если используется емкостной или индуктивный ИПр, то мост должен питаться от источника переменного напряжения. Аналогичные схемы и принцип действия имеют различные ИУ с обратной связью: маятниковые акселерометры, гироскопические датчики, пневматические системы передачи информации, токовые весы, буйковые уровнемеры и пр. На рис. 2.16, а показана обобщенная функциональная схема таких ИУ. На этом рисунке ИЭ – исполнительный элемент, роль которого в приборах с астатическим уравновешиванием выполняет двигатель Д, а в приборах со статическим уравновешиванием – МЭП. На рис. 2.16, б показана линеаризованная структурная схема автоматических приборов. Ее можно использовать для оценки работы приборов в динамическом режиме измерений, когда измеряемая величина изменяется во времени. 
 Рис. 2.16. Определим статическую характеристику АИП, полагая, что статические характеристики всех его звеньев, кроме характеристики моста, линейные, т.е. , , , , , (2.50) где — начальное сопротивление ИПр; — перемещение щетки реохорда; — коэффициенты относительной чувствительности; — коэффициент усиления усилителя; — коэффициент передачи отсчетного устройства; — коэффициент передачи МЭП; — коэффициент передачи преобразователя КП. Для прибора с астатическим уравновешиванием в установившемся состоянии имеет место равенство . С учетом формул (2.50) для этого состояния получим , (2.51) где — постоянный коэффициент, зависящий от параметров прибора. При выборе этих параметров нужно добиваться условия . Статическая характеристика прибора со статическим уравновешиванием определяется решением системы уравнений (2.50), которые нужно дополнить характеристикой мостовой схемы включения (см. (2.17), (2.19)) , (2.52) где — напряжение питания моста; — сопротивление нагрузки (входное сопротивление усилителя). В результате уравнение, связывающее показание прибора со значением измеряемой величины приводится к виду , (2.53) где — постоянные коэффициенты, зависящие от параметров прибора , , ; — относительное сопротивление нагрузки. Отсюда следует . (2.54) При оптимальных значениях параметров прибора максимальное отклонение кривой (2.54) от желаемой характеристики прибора оказывается минимальным [30] (Приложение 5, задача 6.1). Покажем отличия динамических характеристик рассматриваемых приборов. Для этого воспользуемся структурной схемой АИП, показанной на рис. 2.16, б. На этом рисунке используются следующие обозначения: — постоянные коэффициенты; — передаточная функция исполнительного элемента. Если в качестве этого элемента используется двигатель, то , (2.55) где — постоянная времени двигателя; — коэффициент передачи по скорости. Если исполнительным элементом является МЭП, то , (2.56) где — постоянная времени МЭП; — относительный коэффициент демпфирования подвижной системы МЭП, — коэффициент передачи (чувствительность) МЭП. В обоих случаях общая передаточная функция АИП имеет вид передаточной функции типового квазистатического ИУ второго порядка (см. (П2.2)) , (2.57) где — коэффициент чувствительности прибора; — относительный коэффициент демпфирования и постоянная времени прибора; — собственная частота. Для прибора с астатическим уравновешиванием в формуле (2.57) нужно принять , , , (2.58) Для прибора со статическим уравновешиванием , , . (2.59) При проектировании приборов следует добиваться выполнения условий , , , (2.60) где и — желаемые значения параметров, которые определяются исходя из требований, предъявляемых к динамическим характеристикам прибора (см. табл. 6.1). Зная их и используя формулы (2.58) и (2.59), можно выбор параметров прибора подчинить выполнению требований к показателям динамической точности. В разделе 6.3.1 показан пример такого расчета ( см. Пример 6.5). Если желаемые значения коэффициентов передаточной функции прибора подобрать невозможно, то выполнение требований к динамическим характеристикам достигается введением в схему прибора специального корректирующего звена (см. раздел 6.3.2). Рассмотренные приборы относятся к АИП компенсационного уравновешивающего преобразования. Более совершенные метрологические характеристики имеют астатические приборы следящего преобразования. В них отрицательной обратной связью охватывают все элементы прибора. Благодаря этому приборы следящего преобразования имеют высокую точность. Однако они, как правило, имеют более сложную конструкцию. Кроме того, их можно использовать для измерения ограниченного числа физических величин, допускающих непосредственное сравнение: перемещения, силы, тока, напряжения и др. 2.7. Согласование элементов прибора К функциональным устройствам и блокам ИУ относятся первичный и промежуточные ИПр, схемы включения, вспомогательные элементы, нормирующие преобразователи, вычислительное устройство, отсчетное устройство, регистрирующее устройство и пр. В соответствии с ГОСТ 22315-77, все устройства и блоки должны удовлетворять требованиям функциональной, информационной, электрической, эксплуатационной, конструктивной и метрологической совместимостей. Функциональная совместимость устройств обеспечивается согласованием выполняемых ими функций. Информационная и электрическая совместимости достигаются установлением стандартных сечений между сопрягаемыми средствами, а также применением унифицированных измерительных и вспомогательных сигналов для связи между ними. Эксплуатационная совместимость обеспечивается согласованностью технических характеристик элементов, определяющих сохраняемость свойств сопрягаемых блоков при изменении условий эксплуатации. Конструктивная совместимость обеспечивается согласованностью конструктивных характеристик элементов ИУ, метрологическая совместимость обеспечивается согласованностью метрологических характеристик всех средств измерений, составляющих тракт преобразования измерительной информации. Согласование элементов прибора может быть энергетическим, метрологическим, информационным, конструктивным и т.д. Энергетическим согласованием называется выбор таких значений параметров и режима работы ИПр, при которых измерительный сигнал на его выходе создает в нагрузке максимальную мощность. Обычно такой нагрузкой является последующий ИПр или отсчетное устройство. Условием энергетического согласования генераторных ИПр является равенство модулей сопротивления нагрузки и внутреннего сопротивления ИПр, т.е. условие , а параметрических ИПр – условие , где – начальное сопротивление ИПр [31]. При выполнении этих условий мощность сигнала, получаемая нагрузкой, максимальна. Для определения условий энергетического согласования промежуточных ИПр можно применить теорию линейных четырехполюсников [3]. Энергетическое согласование является необходимым для стрелочных электромеханических приборов, содержащих в своем составе подвижную систему, связанную с указателем. Отклонение такой системы от равновесного положения тем больше, чем больше мощность измерительного сигнала. Вместе с тем часто приходится отступать от условий энергетического согласования в пользу других условий, например метрологических. Метрологическое согласование элементов прибора требует выполнения следующих правил [30]:
Рис. 2.16. Определим статическую характеристику АИП, полагая, что статические характеристики всех его звеньев, кроме характеристики моста, линейные, т.е. , , , , , (2.50) где — начальное сопротивление ИПр; — перемещение щетки реохорда; — коэффициенты относительной чувствительности; — коэффициент усиления усилителя; — коэффициент передачи отсчетного устройства; — коэффициент передачи МЭП; — коэффициент передачи преобразователя КП. Для прибора с астатическим уравновешиванием в установившемся состоянии имеет место равенство . С учетом формул (2.50) для этого состояния получим , (2.51) где — постоянный коэффициент, зависящий от параметров прибора. При выборе этих параметров нужно добиваться условия . Статическая характеристика прибора со статическим уравновешиванием определяется решением системы уравнений (2.50), которые нужно дополнить характеристикой мостовой схемы включения (см. (2.17), (2.19)) , (2.52) где — напряжение питания моста; — сопротивление нагрузки (входное сопротивление усилителя). В результате уравнение, связывающее показание прибора со значением измеряемой величины приводится к виду , (2.53) где — постоянные коэффициенты, зависящие от параметров прибора , , ; — относительное сопротивление нагрузки. Отсюда следует . (2.54) При оптимальных значениях параметров прибора максимальное отклонение кривой (2.54) от желаемой характеристики прибора оказывается минимальным [30] (Приложение 5, задача 6.1). Покажем отличия динамических характеристик рассматриваемых приборов. Для этого воспользуемся структурной схемой АИП, показанной на рис. 2.16, б. На этом рисунке используются следующие обозначения: — постоянные коэффициенты; — передаточная функция исполнительного элемента. Если в качестве этого элемента используется двигатель, то , (2.55) где — постоянная времени двигателя; — коэффициент передачи по скорости. Если исполнительным элементом является МЭП, то , (2.56) где — постоянная времени МЭП; — относительный коэффициент демпфирования подвижной системы МЭП, — коэффициент передачи (чувствительность) МЭП. В обоих случаях общая передаточная функция АИП имеет вид передаточной функции типового квазистатического ИУ второго порядка (см. (П2.2)) , (2.57) где — коэффициент чувствительности прибора; — относительный коэффициент демпфирования и постоянная времени прибора; — собственная частота. Для прибора с астатическим уравновешиванием в формуле (2.57) нужно принять , , , (2.58) Для прибора со статическим уравновешиванием , , . (2.59) При проектировании приборов следует добиваться выполнения условий , , , (2.60) где и — желаемые значения параметров, которые определяются исходя из требований, предъявляемых к динамическим характеристикам прибора (см. табл. 6.1). Зная их и используя формулы (2.58) и (2.59), можно выбор параметров прибора подчинить выполнению требований к показателям динамической точности. В разделе 6.3.1 показан пример такого расчета ( см. Пример 6.5). Если желаемые значения коэффициентов передаточной функции прибора подобрать невозможно, то выполнение требований к динамическим характеристикам достигается введением в схему прибора специального корректирующего звена (см. раздел 6.3.2). Рассмотренные приборы относятся к АИП компенсационного уравновешивающего преобразования. Более совершенные метрологические характеристики имеют астатические приборы следящего преобразования. В них отрицательной обратной связью охватывают все элементы прибора. Благодаря этому приборы следящего преобразования имеют высокую точность. Однако они, как правило, имеют более сложную конструкцию. Кроме того, их можно использовать для измерения ограниченного числа физических величин, допускающих непосредственное сравнение: перемещения, силы, тока, напряжения и др. 2.7. Согласование элементов прибора К функциональным устройствам и блокам ИУ относятся первичный и промежуточные ИПр, схемы включения, вспомогательные элементы, нормирующие преобразователи, вычислительное устройство, отсчетное устройство, регистрирующее устройство и пр. В соответствии с ГОСТ 22315-77, все устройства и блоки должны удовлетворять требованиям функциональной, информационной, электрической, эксплуатационной, конструктивной и метрологической совместимостей. Функциональная совместимость устройств обеспечивается согласованием выполняемых ими функций. Информационная и электрическая совместимости достигаются установлением стандартных сечений между сопрягаемыми средствами, а также применением унифицированных измерительных и вспомогательных сигналов для связи между ними. Эксплуатационная совместимость обеспечивается согласованностью технических характеристик элементов, определяющих сохраняемость свойств сопрягаемых блоков при изменении условий эксплуатации. Конструктивная совместимость обеспечивается согласованностью конструктивных характеристик элементов ИУ, метрологическая совместимость обеспечивается согласованностью метрологических характеристик всех средств измерений, составляющих тракт преобразования измерительной информации. Согласование элементов прибора может быть энергетическим, метрологическим, информационным, конструктивным и т.д. Энергетическим согласованием называется выбор таких значений параметров и режима работы ИПр, при которых измерительный сигнал на его выходе создает в нагрузке максимальную мощность. Обычно такой нагрузкой является последующий ИПр или отсчетное устройство. Условием энергетического согласования генераторных ИПр является равенство модулей сопротивления нагрузки и внутреннего сопротивления ИПр, т.е. условие , а параметрических ИПр – условие , где – начальное сопротивление ИПр [31]. При выполнении этих условий мощность сигнала, получаемая нагрузкой, максимальна. Для определения условий энергетического согласования промежуточных ИПр можно применить теорию линейных четырехполюсников [3]. Энергетическое согласование является необходимым для стрелочных электромеханических приборов, содержащих в своем составе подвижную систему, связанную с указателем. Отклонение такой системы от равновесного положения тем больше, чем больше мощность измерительного сигнала. Вместе с тем часто приходится отступать от условий энергетического согласования в пользу других условий, например метрологических. Метрологическое согласование элементов прибора требует выполнения следующих правил [30]:
- При проектировании ИУ с последовательным соединением звеньев нужно стремиться к тому, чтобы ИПр, расположенный ближе ко входу ИУ, имел больший коэффициент чувствительности и меньшее значение аддитивной погрешности;
- При проектировании ИУ с параллельным соединением звеньев нужно стремиться к тому, чтобы ИПр с большим коэффициентом чувствительности имел меньшее значение аддитивной погрешности;
- При проектировании ИУ с обратной связью нужно стремиться к тому, чтобы ИПр, расположенный в цепи отрицательной обратной связи, имел малые значения мультипликативной и аддитивной погрешностей.
Информационное согласование элементов прибора достигается применением системы унифицированных сигналов. В табл. 2.8 дан перечень унифицированных аналоговых сигналов Государственной системы промышленных приборов и средств автоматизации (ГСП). Таблица 2.8. Основные виды унифицированных аналоговых сигналов
| Параметры сигнала | Вид сигнала | ||
| Физическая величина Электрический | Постоянный ток | 0–5; 0–20; -5–0–5; 4–20 мА | |
| Постоянное напряжение | 0–10; 0–20; -10–0–10 мВ 0–10; 0–1; -1–0–1 В | ||
| Переменное напряжение | 0–2; -1–0–1 В | ||
| Частота | 2–8; 2–4 кГц | ||
| Пневматический | Давление | 0,02–0,1 МПа | |
| Гидравлический | Давление | 0,1–6,4 МПа | |
- Назовите приборы и системы, отличающиеся назначением, принципом действия и областью применения.
- Дайте определение терминам: измерительное устройство, измерительный прибор, датчик, измерительный преобразователь, измерительная установка, измерительная система. Назовите существенные признаки и основные отличия этих средств измерений.
- Какие средства измерений относятся к измерительным устройствам ?
- Назовите виды измерительных систем, отличающихся назначением. Назовите отличительные признаки этапов развития (поколений) ИИС.
- Укажите на достоинства и недостатки приборов прямого и уравновешивающего преобразования, аналоговых и цифровых приборов.
- Поясните отличие ИП статического и астатического уравновешивания.
- Поясните состав и назначение вспомогательных элементов прибора.
- Приведите примеры генераторных и параметрических ИПр. Укажите, чем отличаются они друг от друга.
- Перечислите виды ИПр, отличающиеся информативным параметром выходного сигнала.
- Перечислите режимы измерений физических величин. Поясните, чем они отличаются друг от друга.
- Изобразите типовые структурные схемы ИУ. Поясните, чем они отличаются друг от друга.
- Изобразите обобщенную структурную схему измерительного прибора. Поясните состав и назначение элементов этой схемы.
- Изобразите обобщенную структурную схему измерительной системы. Поясните состав и назначение элементов этой схемы.
- Изобразите структурные схемы двухканальных инвариантных ИУ. Поясните, за счет чего при использовании этих схем достигается инвариантность.
- Перечислите основные виды первичных ИПр. Какие физические величины можно измерять с их помощью ?
- Какие требования предъявляются к первичным ИПр ?
- Поясните назначение схемы включения ИПр. Назовите основные виды схем включения.
- Какова функция преобразования схемы делителя напряжений ? От каких параметров схемы зависит погрешность от нелинейности ее статической характеристики ?
- Назовите типы мостовых схем включения. Напишите условие равновесия моста.
- Напишите формулу, выражающую зависимость напряжения в измерительной диагонали моста от сопротивлений его плеч.
- Поясните отличия статических характеристик мостовых ИУ с разным числом ИПр.
- Поясните порядок расчета температурной погрешности мостового ИУ. Приведите пример такого расчета.
- Назовите характеристики частотно-зависимых цепей. Приведите пример расчета этих характеристик для Г – образной схемы.
- Поясните принцип действия генератора с мостом Вина.
- Чем отличаются приборы с астатическим и статическим уравновешиванием? Поясните порядок расчета выходных характеристик таких приборов (Приложение 5, задача 6.1).
- Назовите условия энергетического согласования элементов прибора.
- Назовите условия метрологического согласования элементов прибора.